
基于直流虚拟同步机的直流充电桩反推电流控制
2023-07-17 02:13杨成顺黄宵宁
济南大学学报(自然科学版) 2023年4期
杨成顺, 王 鹏, 张 强, 黄宵宁
(1. 南京工程学院 电力工程学院, 江苏 南京 211167; 2. 济南大学 自动化与电气工程学院, 山东 济南 250022)
在碳达峰、碳中和战略目标推进下,电动汽车行业大规模发展。电动汽车作为高效、清洁的新型出行工具,可有效缓解化石能源消耗和环境问题[1]。
在电动汽车保有量持续上涨的同时,与之相配套的充电桩建设却较为缓慢[2]。据统计,截至2021年12月, 我国电动汽车公共充电桩共114.7万台,桩车增量比为1∶3.7[3],充电桩的建设量已严重滞后于电动汽车的保有量,制约了电动汽车产业的进一步发展。除此以外,多数电动汽车车主对可用充电桩的充电速度非常不满意,成为目前公共充电领域的一大问题[4],因此,加快研究可快速充电的电动汽车充电桩,对于我国电动汽车行业的发展具有重要意义。
电动汽车充电方式可分为交流充电和直流充电[5]。其中,交流充电桩充电时间通常为5~8 h,因此被称为慢充。虽然交流充电方式在一定程度上能够保护车辆电池的寿命,但是无法满足用户对快速充电的需求[6]。直流充电方式因充电速度快、实用性强而被称为快充,原因是直流充电桩可在桩内将电网的交流电转换为直流电,输出电流更大,充电速度更快[7]。由于直流充电桩需要在整流的同时保障直流侧电压的稳定,因此对控制策略提出了更高的要求。除此以外,电动汽车负载的频繁投切容易引起公共电网的电压扰动以及充电桩输出功率变化等问题,亟需更先进的控制策略来保障公共电网安全及充电桩的正常运行。
目前针对直流充电桩的控制研究大多集中在一些传统的控制方法,如下垂控制、dq解耦控制和比例积分(PI)控制等,但在负载变化较复杂的情况下,传统控制方法下的系统动态性能及抗干扰能力等存在明显不足。文献[8-9]中研究了在充电桩整流过程中采用下垂控制和基于传统PI控制的电压-电流双环控制,可在负载端较稳定的情况下达到良好的整流效果,但该方法在面临电动汽车负载的复杂投切情况时存在抗电压扰动能力较弱问题。文献[10-12]中通过建立整流器数学模型,提出了适用于直流充电桩的控制策略,取得了较好的控制效果,但平抑直流母线电压波动效果较差。上述文献仅仅将电动汽车看作充电桩的被动负载,负载变化引起暂态扰动时,直流母线电压会随之波动,此时电动汽车不具备主动参与调节充电桩直流母线电压的能力,从而导致充电桩系统的不稳定。作为电网与电动汽车之间的桥梁,电动汽车充电桩面临的主要问题在于系统缺乏惯性与阻尼[13],汽车负载的频繁投切容易降低电能质量,甚至会影响配电网的稳定运行[14]。针对此问题,文献[15]中提出一种利用储能环节为直流系统提供惯性的控制方法;但该方法对系统元件及应用场景要求较高,因此不能广泛应用于直流充电桩。文献[16]中提出一种可为直流充电桩提供虚拟惯性的控制策略,可有效降低直流侧电压扰动,但输出电压依靠系统频率的变化进行调节,对直流系统不具有普遍适用性。
传统的虚拟同步机(virtual synchronous machines,VSM)技术可为交流系统增加惯量与阻尼,可有效抑制负载变化对系统频率与功率的影响,但直流充电桩系统的控制目标为直流母线电压,若将传统的VSM技术改进为以直流侧电压为控制目标的直流虚拟同步机(DC virtual synchronous machines,DVSM),并将其引入直流充电桩控制中,则能进一步增强直流充电桩应对电压扰动的能力。文献[17]中提出在传统电压-电流双闭环控制中引入一种新型电压环控制方法,使直流系统具有类似同步机特性,可增强系统惯性,平抑直流电压波动,但该方法使用基于传统PI控制的电流环,存在动态性能较弱的问题[18]。反推控制作为动态性能优异的非线性控制方法,可降低负载扰动对系统的影响并缩小系统稳定所需时间,在直流虚拟同步机电压外环控制的前提下,将反推控制应用于直流充电桩的电流环控制中,使充电桩在具有同步机特性的同时,进一步增强系统动态特性,可在更短时间内平抑电压冲击,大大增强直流充电桩的安全性能。
基于上述分析,针对电动汽车负载投切容易引起公共电网的电压扰动及功率变化等问题,本文中提出一种适用于电动汽车直流充电桩的直流虚拟同步机控制方法。首先,在直流充电桩系统发生暂态扰动时,通过为系统增加一定的惯性与阻尼,使波动的直流母线电压及输出功率能自主参与调节至系统稳定;然后,利用反推法设计了电流环控制器,有效弥补传统PI控制电流环在动态性能上的不足;最后,分别以直流虚拟同步机与反推电流环作为电压外环与电流内环,将基于直流虚拟同步机的反推控制器(DVSMBS)引入直流充电桩,仿真验证其稳定直流侧电压和调节输出功率的能力。
1 电动汽车直流充电桩结构
电动汽车直流充电桩结构如图1所示,主要包括公共电网、变压器、相关电力电子元件和储能电容等。公共电网中的电能通过变压器调压后,经滤波电感L、滤波电容C0滤波后向直流充电桩输入三相交流电,整流后为汽车负载提供稳定直流电能。整流过程经直流虚拟同步机控制,并保持直流侧电压udc的稳定。

R—线路电阻; L—滤波电感; C0—滤波电容; ea、 eb、 ec—交流测三相端电压; Ic—整流后输入电流;Idc—充电桩输出电流; C—直流侧电容; udc—充电桩输出电压。图1 电动汽车直流充电桩的结构
直流充电桩系统的惯性通常较小,当电动汽车以负载的形式并联接入系统时将会引起母线电压的波动,波动较大时不仅会影响汽车电池的寿命,甚至会影响公共电网的正常运行[19]。针对此问题,本文中采用直流虚拟同步机的方法为直流系统提供惯性与阻尼,从而使直流侧电压在受到扰动时能够快速恢复稳定。
2 直流虚拟同步机数学模型
交流系统中VSM通过模拟传统同步机数学模型,建立同步机定转子运动方程,使变流器具有传统同步机的惯量和阻尼特性。同步机极对数为1时,交流虚拟同步机数学模型[20]为
(1)
(2)
(3)
式中:Tm、Te分别为同步机机械转矩和电磁转矩;D为虚拟阻尼系数;ω为系统频率;ωn为额定频率;J为虚拟惯量;Pm、Pe分别为机械、 电磁功率。
VSM根据电网电压和频率的实时变化同步调节有功和无功功率,使被动负荷通过惯量和阻尼特性主动参与电网电压和频率调节[21]。同步机的惯性时间常数H表达式为
(4)
式中:W为转子储存的能量;Sn为同步机额定容量。
交流系统中,W可以表示为
(5)
由式(5)可知,虚拟惯量J越大,转子储存的动能越大,系统的惯性越大,可为受到扰动的系统提供足够的有功支撑。类似地,直流系统中,能量通常存储在直流侧的并联电容C中,电容存储的能量W可以表示为
(6)
式中U为直流侧电压。
与交流系统相似,直流侧的并联电容C值越大,同步机存储的能量越多,系统的惯性也更大,可以看出电容C与转动惯量J起相同作用。实际上,直流系统中并联的电容器通常容量较小,在系统受到扰动或较大负荷突然接入时,会因惯性较小而引起系统较大波动。针对此问题,本文中引入直流虚拟同步机,利用虚拟电容Cv代替直流侧的并联电容作为系统的惯性系数。虚拟电容通过充放电过程达到对系统的惯性支撑,电容两侧输入电流与输出电流的关系可表示为
(7)

为了使直流虚拟同步机能够具有VSM类似的阻尼特性,增加阻尼系数D,使直流系统发生电压变化时合理调节输出电流,电容侧输入电流表达式为
(8)
式中:Iset为直流虚拟同步机给定输出电流;Id为直流阻尼电流;udc为直流侧电压。
将式(8)代入式(7),可以初步得到直流虚拟同步机的表达式为
(9)
在直流配电网中引入电压-电流下垂控制,可以利用下垂系数k依据输出电流的幅值控制电压的输出[22],
Iset-Idc=k(un-udc),
(10)
式中un为直流侧额定电压。
根据式(1),并在式(9)的基础上加入下垂控制,得到DVSM表达式为
(11)
DVSM控制结构如图2所示。由式(11)可知,当直流侧电压udc改变并逐渐偏离额定电压un时,直流虚拟同步机通过下垂系数k调节输出电流。同时,由于阻尼系数D的存在,系统具备阻尼振荡特性;虚拟电容Cv的存在弥补了直流系统小惯性的通病,为系统提供惯性支撑的同时,使母线电压变化平缓,因此可保障直流充电桩的平稳运行[23]。

Idc—电容输出电流; D—阻尼系数; Cv—虚拟电容;k—下垂系数; udc—直流侧电压; un—直流侧额定电压;直流虚拟同步机输出电压。图2 直流虚拟同步机控制框图
3 反推电流环控制器设计
目前,DVSM大多采用基于PI控制器的电流内环控制器,在实际仿真中发现,当系统接入或切除负荷时,PI控制可以保障系统在静态的平稳运行,并在一定程度上减小系统扰动时的电压波动,但是,PI控制的动态性能较差,对于直流充电桩来说,系统在负荷接入、切除时发生的短暂波动不仅会对电网产生短暂冲击,还会使其他负载所加电压产生短暂波动,甚至缩短电动汽车使用寿命。
针对传统的基于PI控制的电流环在动态性能上的不足, 本文中设计了一种用于直流虚拟同步机控制的反推电流环, 用于改善电流环控制器的动态性能。
DVSM电流内环在dq坐标系下的数学模型[24]可表示为
(12)
式中:L、R分别为变流器线路电感、 电阻;ed、eq为交流测电压的d、q轴分量;id、iq为交流测电流的d、q轴分量;ω为系统频率;Sd、Sq为开关信号。
为了使式(12)更为简洁,方便后续计算,提取其中变量id、iq,并定义状态量[x1,x2]T=[id,iq]T,式(12)可改写为
(13)
为了实现直流虚拟同步机电压跟踪控制,首先根据反推法经典步骤,定义误差e1、e2为
(14)

选择Lyapunov函数为
(15)
将式(15)求导并代入误差x1的导数得到
(16)
式中k1为大于0的常数。
(17)
(18)

(19)
式中k2为大于0的常数。
若要使V2保持稳定,设计开关信号Sq为
(20)
(21)

利用所求Sd、Sq开关信号构造反推电流环控制器取代原来的电流环控制,改进后的反推电流环控制框图如图3所示。

反推法d、 q轴误差;k1、 k2—大于0的常数; ed、 eq—交流测电压的d、 q轴分量;id、 iq—交流测电流的d、 q轴分量; Sd、 Sq—开关信号。图3 反推电流环控制框图
在实际运行中, 负载投切以及线路参数变化都会导致直流充电桩输出电压改变, 使用改进的电流环控制器可以使系统直接根据交流测电压、 电流和直流侧电压等参数的变化及时调节输出的脉冲宽度调制(PWM)信号, 进一步提升了系统动态性能与鲁棒性, 能够满足直流充电桩安全、 高效的应用要求。
4 仿真验证与结果分析
为了验证本文中所提DVSMBS控制策略对直流充电桩控制的有效性,利用MATLAB/Simulink仿真软件对图4所示的控制策略进行仿真实验,仿真实验设置电动汽车负载简单投切和复杂投切2种场景,在2种场景下通过对比直流侧电压变化结果对比分析本文中所提DVSM与传统电压电流双环的控制效果,并通过对比充电桩直流侧电压和输出功率的变化结果对比分析DVSMBS与使用PI电流环的DVSM控制效果。

Tr—三相变压器; PI—比例积分; PWM—脉冲宽度调制;Uabc—三相电网电压; Iabc—三相电网电流;R—线路电阻; L—滤波电感; ea、 eb、 ec—交流测三相端电压; Ic—整流后输入电流;Idc—充电桩输出电流; C—直流侧电容; C0—滤波电容; Cv—虚拟电容; udc—充电桩输出电压;反推法d、 q轴误差; k—下垂系数; D—阻尼系数; un—直流侧额定电压; 为直流虚拟同步机输出电压。图4 直流充电桩控制策略结构图
仿真模型中公共电网电压值为35 kV,变压器变压比为35 kV/5 kV,直流虚拟同步机控制器系统参数如表1所示。

表1 直流虚拟同步机系统参数
4.1 汽车负载简单投切场景
电动汽车负载简单投切的场景设置如下:在直流充电桩开始运行时间t=0 s,t=4 s时,在直流充电桩已连接一辆电动汽车负载的前提下再次连接一辆电动汽车负载;当t=5 s时,充电桩切除一辆电动汽车负载。电动汽车负载阻值设为30 Ω。
电动汽车负载变化时,在直流虚拟同步机与传统电压-电流双环控制下的直流侧电压变化如图5所示。由图可以看出,在电流内环均使用PI控制的前提下,在本文中提出的直流虚拟同步机控制策略下的系统直流母线电压超调量更小,电压恢复稳定时间更短,系统的鲁棒性更好。
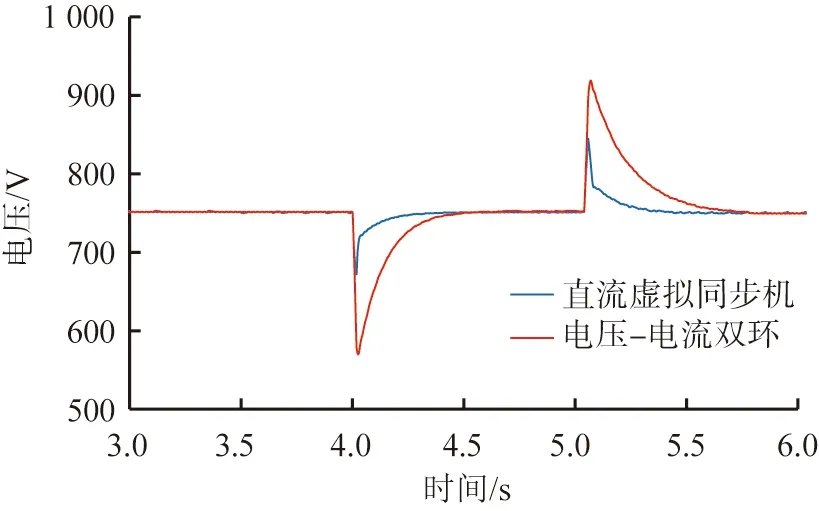
图5 负载突变后充电桩系统直流侧电压变化
在使用直流虚拟同步机控制直流充电桩的前提下,当电动汽车负载变化时,使用传统PI控制的电流环控制器(DVSM_PI)与反推电流环(DVSMBS)控制下的直流侧电压udc与充电桩输出功率的变化曲线如图6所示。

(a)直流侧电压

(b)输出功率DVSMBS—直流虚拟同步机与反推电流环控制系统;DVSM_PI—直流虚拟同步机与传统PI电流环控制系统。图6 负载突变后充电桩系统直流侧电压与输出功率变化
在t=4 s时,由于新接入负载,充电桩内有功功率不足,直流侧电压从稳定的750 V发生突减,随后在虚拟惯性的控制下,直流电压在较短的时间内重新恢复到750 V。由图6可知,在接入负载过程中,直流虚拟同步机为系统提供的惯性支撑使电压上升过程较为平滑且不会出现较大的超调量。由图6(a)可知,在以直流虚拟同步机作为电压外环的前提下,DVSM_PI系统的直流母线电压在t=4 s时发生较大波动,波动幅值约为80 V,相同条件下DVSMBS系统直流侧超调明显减小,具有较好的鲁棒性。由图6(b)可知,DVSMBS系统输出功率增至3.5 kW过程更平滑,系统可靠性更高。由此可以验证,与传统PI电流环相比,在直流母线电压从突减到恢复稳定的过程中使用反推电流环的系统明显超调更小,电压没有回落且稳定速度更快,且充电桩输出的有功功率变化更为平缓,因此采用反推电流环的DVSMBS系统具有更好的动态性能。
在t=5 s时,充电桩切除1辆电动汽车负载,此时充电桩输出有功功率大于负载需求,直流侧电压突增, 虚拟电容Cv的存在阻碍直流侧电压偏离额定电压, 并使其短时间内重新稳定。 由图6可知, DVSM_PI系统的鲁棒性较差, 在切除1辆电动汽车负载后, 直流母线电压发生了最大幅值约为100 V的电压扰动, 且输出功率突减至1.9 kW。 而DVSMBS系统在相同条件下, 直流母线电压波动幅值约为30 V且输出有功功率平缓下降, 能够保障充电过程的安全进行。 从仿真结果可以看出, 与接入负载过程相似, 使用反推电流环的充电桩系统的鲁棒性更强, 在电压恢复稳定的过程中恢复速度快, 超调量小, 且没有电压回升现象, 稳定电压效果更好。
4.2 电动汽车负载复杂投切场景
由4.1节中仿真结果可知,使用直流虚拟同步机与反推电流环控制的充电桩系统可以有效抑制负载变化引起的直流侧电压扰动。为了进一步验证DVSMBS方法的有效性,对电动汽车负载的复杂投切场景进行仿真实验。电动汽车负载复杂投切场景如下。
在t=3 s时,直流充电桩连接电动轿车(1号车),阻值为30 Ω;
在t=4 s时,车桩同时连接电动轿车(2号车)与中型客车(3号车),阻值分别为30、45 Ω;
在t=5 s时,连接中型客车(4号车)并切除1号车;
在t=6 s时,切除2号车;
在t=7 s时,切除3、4号车。
根据以上场景,电动汽车类型及接入、切除时间如表2所示。
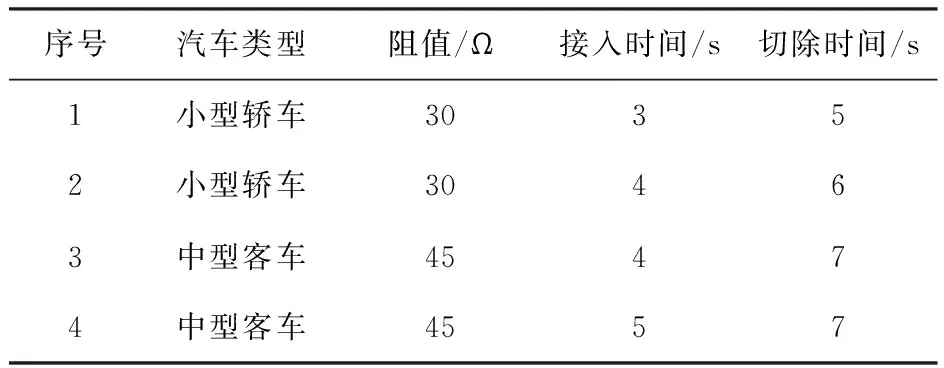
表2 电动汽车充电接入、切除设置
电动汽车负载复杂变化时, 在直流虚拟同步机与电压-电流双环控制下的直流侧电压变化结果如图7所示。 由图可知, 在均使用PI控制的电流内环时, 当充电桩受到不同情况的电动汽车负载投切时, 在直流虚拟同步机控制下的系统直流侧电压超调量更小, 电压恢复稳定时间更短, 在负载复杂变化的情况下验证了本文中提出的DVSM控制策略的有效性。

图7 电动汽车复杂投切引起的直流侧电压变化
汽车负载的阻值以及投切情况共同决定了直流充电桩输出的有功功率,并且两者的变化将带来直流侧电压扰动。面对汽车负载投切的不同情况,直流侧电压的变化以及充电桩能否及时输出汽车负载所需功率是衡量充电桩性能的重要标准。
在使用直流虚拟同步机控制的前提下,分别使用传统PI控制的电流环控制器(DVSM_PI)与本文中所设计的反推电流环(DVSMBS)控制下的直流侧电压udc与充电桩输出功率的变化曲线如图8所示。

(a)直流侧母线电压

(b)输出功率DVSM_PI—直流虚拟同步机与传统PI电流环控制系统;DVSMBS—直流虚拟同步机与反推电流环控制系统。图8 电动汽车投切引起的充电桩系统直流侧母线电压和输出功率的变化
由图可知,直流充电桩在t=3、 4 s时分别连接了不同阻值、不同数量的汽车负载,在系统惯性的支撑下,直流侧电压恢复稳定所需时间短,同时充电桩可即时调整输出负载所需有功功率。值得注意的是,充电桩系统在接入负载后,直流侧负载阻值越大,直流母线电压的波动幅值越大,t=3、 4 s时,面对电动汽车投切引起直流侧负载变化问题,相较于DVSM_PI系统,DVSMBS系统的直流母线电压超调量明显更小,电压稳定时间更短,且输出功率变化更平滑。t=5 s时,接入中型客车4号车, 切除电动轿车1号车,由于直流侧负载变化较小, 因此DVSM_PI系统与DVSMBS系统的直流母线电压均发生微小波动,充电桩输出功率也随之变化。t=6、 7 s时,系统分别切除了不同车型、不同数量的汽车负载。由图8可知,t=7 s时,充电桩切除的负载较大,直流侧负载随之发生较大变化,DVSM_PI系统直流母线电压发生剧烈波动,系统可靠性低,而采用反推电流环的DVSMBS系统的电压超调量依旧较小且输出功率变化缓慢,具有更好的鲁棒性。
仿真结果表明,在直流虚拟同步机控制下,传统PI电流环和反推电流环都能够很好地平抑直流母线电压扰动且灵敏地调整输出功率,但采用反推电流环的充电桩输出功率平滑,可以更好地稳定直流侧电压,具有更好的鲁棒性,能够保障充电过程安全进行,仿真结果验证了所提DVSMBS控制策略的有效性。
5 结论
电动汽车直流充电桩的充电速度更快,能够满足车主短时充电的需求,然而,直流系统的惯性一般较小,汽车负载的不规律投切极易引起直流侧电压的扰动,进而影响充电过程的正常进行,甚至危害公共电网的稳定性,为此,本文中提出了一种适用于直流充电桩的直流虚拟同步机控制策略,并且利用反推法构造了动态性能更好的反推电流环控制器,得出以下结论:
1)通过分析交-直流系统运行特性,得到了适用于直流充电桩的直流虚拟同步机控制策略,可以为直流系统提供虚拟惯性,同时面对负载投切的复杂情况时可以很好地稳定直流侧电压波动。
2)针对传统电流环PI控制的动态性能较差问题,提出了反推电流环控制器。仿真结果表明,使用反推电流环可以更好地减小电压扰动,并且充电桩输出功率过程更为平滑。
3)通过对汽车负载的简单、 复杂投切情况进行应用场景进行仿真分析, 证明了将直流虚拟同步机与反推电流环用于直流充电桩具有更好的控制效果。
猜你喜欢
电气技术(2022年10期)2022-10-25
大电机技术(2022年1期)2022-03-16
科技信息·学术版(2021年31期)2021-12-03
防爆电机(2020年4期)2020-12-14
科学与财富(2020年3期)2020-04-02
成都信息工程大学学报(2018年3期)2018-08-29
北京航空航天大学学报(2016年6期)2016-11-16
电测与仪表(2016年9期)2016-04-12
交通科学与工程(2015年1期)2015-12-23
电测与仪表(2015年9期)2015-04-09
