无人机自主滑翔中的模式切换逻辑研究
2023-07-12 01:14:24陈杰史志伟姚张奕殷镇权葛增冉
实验流体力学 2023年3期
陈杰,史志伟,姚张奕,殷镇权,葛增冉
南京航空航天大学,南京 210016
0 引 言
近年来,无人机不再局限于军事应用,在消防、测绘、植保等民用方面也应用广泛[1-2],对航程远、航时长且更为自主化、智能化的无人机的需求也日益迫切[3]。目前,能源系统是限制无人机飞行能力的主要因素,由于无人机的负载和动力系统会消耗大量能量,且所能携带的能源容量有限,导致其难以获得理想的续航能力[3-4]。
为提高无人机的续航能力,可以对气动外形进行优化[5-6],减小空中飞行的阻力,也可以增大翼展以提升无人机的滑翔能力,还可以在飞行器表面安装太阳能板,通过光伏技术为无人机提供能量[7-8]。这2 种措施能够有效提升无人机续航能力,但对于小型无人机而言,优化气动外形难以显著增大其续航能力。光伏技术须安装太阳能板,这会给机翼材料增加负担,且太阳能的获取受天气影响较大,对小型无人机续航能力的提升有限。
众所周知,自然界的鸟类可以利用风能提升飞行时间和距离,如军舰鸟、秃鹰等鸟类会借助环境中的热上升气流进行静态滑翔飞行[9]。国内外研究者尝试将其原理应用到无人机上,并取得了一定的成果。在热上升气流建模方面:Bencatel 等[10]总结了Chimney 和Bubble[11]2 种热上升气流的模型;Allen[12]对沙漠地区的热上升气流进行了数据统计,基于Chimney 模型建立了热上升气流数学模型。在无人机滑翔控制策略方面:Allen 等[13]利用飞行器的总能量状态估计热上升气流的强度和位置,并基于此设计了定位气流中心的控制方法;Wharington[14]应用强化学习设计了滑翔控制方法;Kahveci 等[15]利用LQR(Linear Quadratic Regulator)控制方法定位与跟踪热上升气流中心。在设计用于控制无人机进入和脱离热上升气流的模式切换逻辑方面:Allen[13]和Edwards[16]等设计了能量估计器,并利用能量估计器的输出(能量的一阶和二阶导数)设计模式切换逻辑。
模式切换问题是无人机利用热上升气流进行自主滑翔的关键问题之一。本文针对这一问题设计了一套基于七孔探针和嵌入式技术的气流感知系统,并将其应用于自主滑翔的模式切换逻辑,相比于Allen 等[13]基于无人机能量设计的模式切换逻辑,本文所设计的模式切换逻辑无需对不同无人机进行动力装置辨识建模。为验证所设计的模式切换逻辑,在风洞中搭建了一套热上升气流模拟装置,利用风洞虚拟飞行试验平台,分析所设计的模式切换逻辑的可行性。
1 气流感知系统
1.1 七孔探针的结构
七孔探针的结构外形如图1 所示。探针长度为125 mm,直径为4.6 mm,头部锥度为30°。从七孔探针头部看,7 号孔位于中心,其余6 孔围绕7 号孔均匀分布,探针体表面红点对应1 号孔。各孔连接的导管伸出探针体的长度不同,导管由长到短依次连接1~7 号孔。

图1 七孔探针结构外形Fig.1 Configuration of seven-hole probe
1.2 七孔探针的校准
1.2.1 流动分区
当气流方向与探针轴线夹角很大时,会出现流动分离现象[17],如图2 所示。按照7 个孔的压力值,将探针头部划分为7 个区,7 区为内区,其余6 个区为外区。
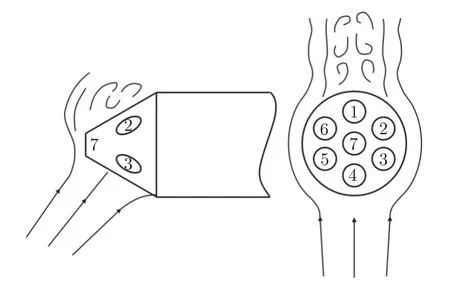
图2 大角度下探针头部流场Fig.2 Flow around the probe at high flow angle
1.2.2 气流角定义
如图3 所示,建立直角坐标系Oxyz,u、v、w 分别为流动速度在x、y、z 方向上的分量。在小流动角情况下,来流方向用迎角α 和侧滑角β 表示;在大流动角情况下,来流方向用俯仰角θ 和滚转角φ 表示。
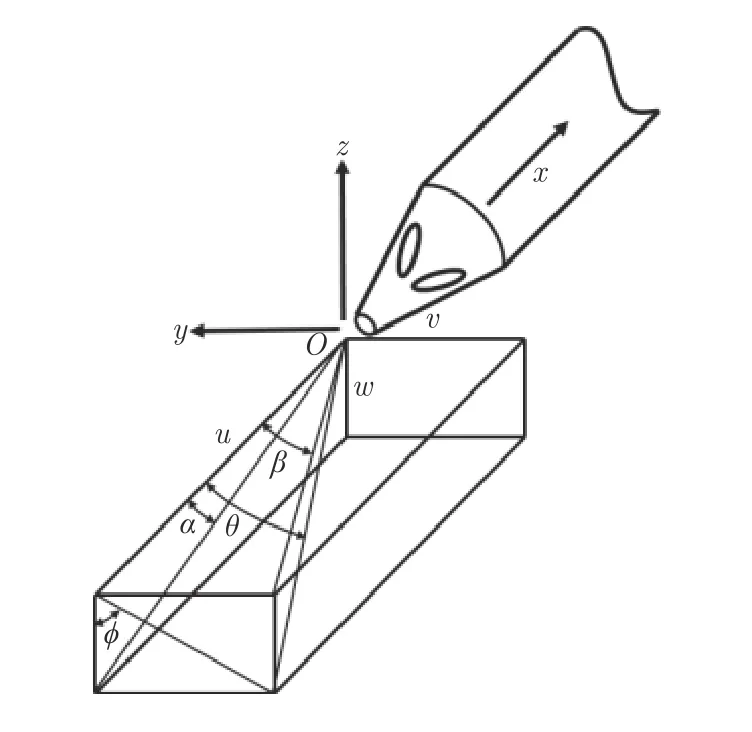
图3 校准坐标系Fig.3 Calibration coordinate system
1.2.3 压力系数定义
在内区,对7 个孔测得的压力进行数据处理,定义无量纲压力系数C1、C2、C3[18]如下:
式中:p1~p7分别为七孔探针7 个孔的压力,为外圈6 个孔压力的平均值。
对C1、C2、C3进行加权平均,得到迎角系数Cα和侧滑角系数Cβ:
为得到来流总压和静压,定义总压系数C0和动压系数Cq如下:
式中:p0为局部总压,p∞为局部静压,校准时通过皮托管测量得到。
在外区,通过对压力值最高的孔及其相邻2 个孔的压力数据进行处理,获得俯仰角系数 Cθi、滚转角系数 Cφi、总压系数C0i和动压系数Cqi如下:
式中:下标i、i+、i-分别代表外区压力孔编号及其相邻2 个孔的编号。
1.2.4 多项式拟合
用四次多项式表示流动参数A(即来流的方向角、总压和动压等)[19]。内区用Cα和Cβ作为变量,外区用Cθi和Cφi作为变量。以内区为例,多项式拟合矩阵如下:
式中:KA是流动参数A 的校准系数。
1.3 压力数据采集处理模块
为实现探针压力的精确实时测量,选用体积小、重量轻的MS4515DO-DS3BK004DP 数字式压力传感器(图4)。传感器测量压差,工作电压3.3 V,测量频率最快为1 kHz,量程为-996.328~996.328 Pa,输出接口为两线I2C 接口。
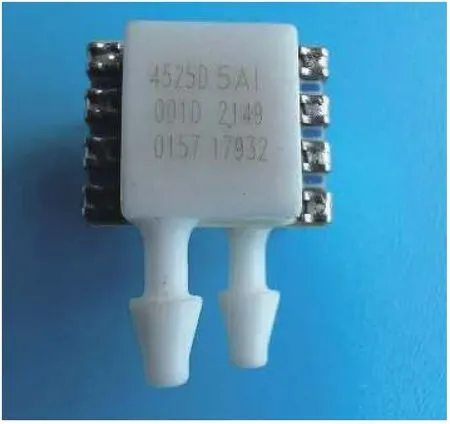
图4 数字式压力传感器Fig.4 Digital pressure sensor
本文基于嵌入式技术开发了数据采集处理模块,如图5 所示。主控芯片为STM32F407,通过I2C连接MS4515 压力传感器以读取探针的压力数据,然后利用探针校准拟合多项式解算得到流动速度、迎角和侧滑角,同时将采得的压力数据和解算出的气流参数通过UART 串口发送。

图5 数据采集处理模块实物图Fig.5 Photo of data acquisition and processing module
气流感知系统主要由七孔探针和数据采集处理模块组成,两者之间通过软管连接。所设计的气流感知系统的压力数据采集频率最大可达50 Hz,压力测量时延(经过探针和软管传递给传感器,软管越长,时延越长)不超过0.025 s。
2 试验模型及方法
2.1 试验模型
试验模型是仿滑翔状态的军舰鸟设计的。模型全长543.2 mm,展长1 000 mm。表1 为试验模型的几何参数,图6 为试验模型设计图和实物图。试验模型采用3D 打印技术加工制作,内部装有舵机以控制舵面,头部装有七孔探针,内嵌数据采集处理模块和Pixhawk 飞行控制器[20],可实现姿态解算、控制律执行和数据记录等功能。
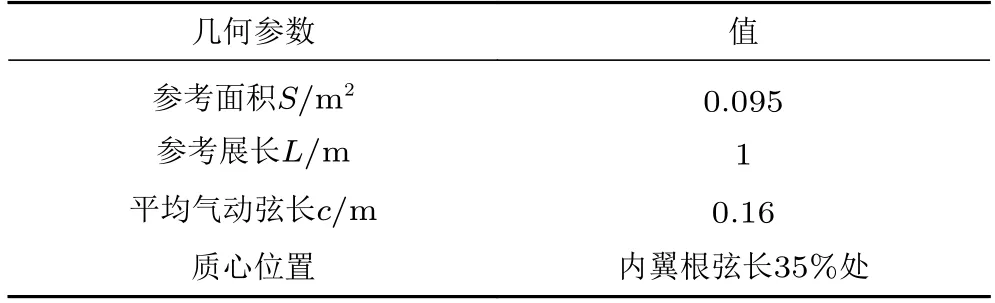
表1 试验模型几何参数Table 1 Geometric parameters of the test model
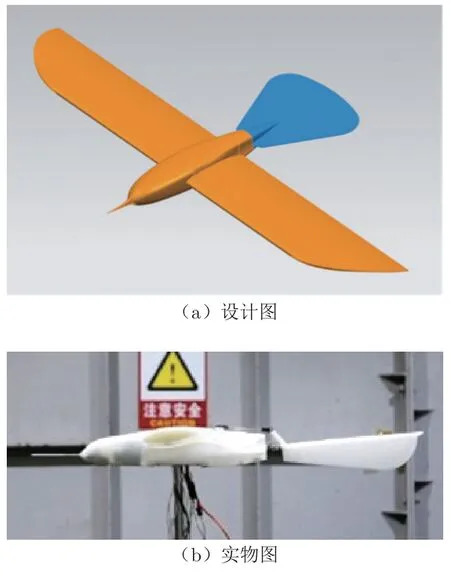
图6 试验模型设计图和实物图Fig.6 Design drawing and photo of test model
2.2 热上升气流模拟装置
图7(a)为热上升气流模拟装置设计图。该装置由5 个部分组成:金属底座,动力段,稳定段1、2、3。金属底座起支撑的作用,为了制作方便,将其拆分为若干零部件进行加工。动力段放置有3 个呈等边三角形分布的金属涵道,用以提供气流。稳定段1 内有蜂窝器,由方形小格子构成,稳定段1 与2、稳定段2 与3 之间布置有阻尼网。稳定段的功能在于稳定涵道产生的不均匀气流,使旋涡衰减、速度大小和方向的分布更为均匀[21]。动力段、稳定段(包括蜂窝器)都采用3D 打印技术制作,如图7(b)所示。热上升气流模拟装置虽然装有1 层蜂窝器和2 层阻尼网,但其出口气流的均匀性低于常规风洞。
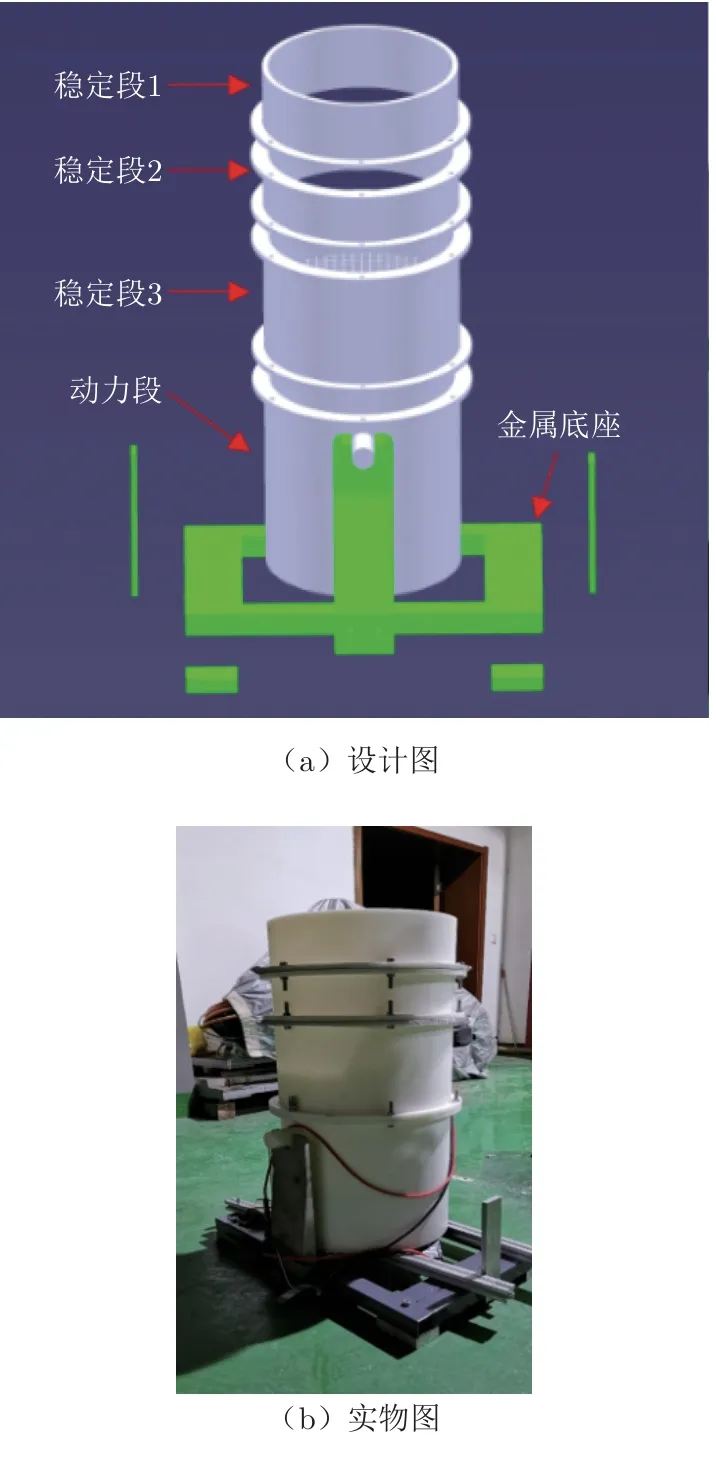
图7 热上升气流模拟装置设计图和实物图Fig.7 Design drawing and photo of updraft simulation device
热上升气流模拟装置采用PWM(脉冲宽度调制)控制,PWM 信号通过单片机产生[22]。通过调节PWM 信号的占空比,控制动力段金属涵道转速,从而控制热上升气流速度。以直流电源为热上升气流模拟装置动力段供电,工作电压25 V。在距出口330 mm 处架设皮托管,标定该装置产生的热上升气流速度,标定结果如表2 所示。

表2 热上升气流速度标定Table 2 Calibration of updraft velocity
2.3 模式切换逻辑
模式切换逻辑对于无人机自主滑翔非常重要:当飞行器飞经热上升气流区域时,须通过模式切换逻辑使飞行器进入滑翔模式,利用热上升气流获取能量;当热上升气流不足以提供额外能量时,则须通过模式切换逻辑使飞行器脱离滑翔模式[23]。对于保持定直平飞的无人机,其飞行速度和高度变化不大,热上升气流影响的主要是飞行迎角及其变化率,因此,选择飞行迎角及其变化率来设计模式切换逻辑。
典型的热上升气流由空气吸收太阳辐射能引起,如图8 所示,其在水平方向呈高斯分布,中心气流速度最大,离中心越远,气流速度越小。据文献[24]的研究,当飞行器以姿态增稳模式定直平飞经过图8 所示的热上升气流区域时,迎角从α0逐渐增大,达到一定值后逐渐减小,最后再恢复到α0,如图9 所示(图中横轴t 为时间,纵轴标值α0表示定直平飞时的配平迎角)。在此过程中,迎角变化率由正变负再由负变正。根据这些特征,设计如图10 所示的模式切换逻辑。
图8 热上升气流三维图Fig.8 Three-dimensional diagram of thermal updraft
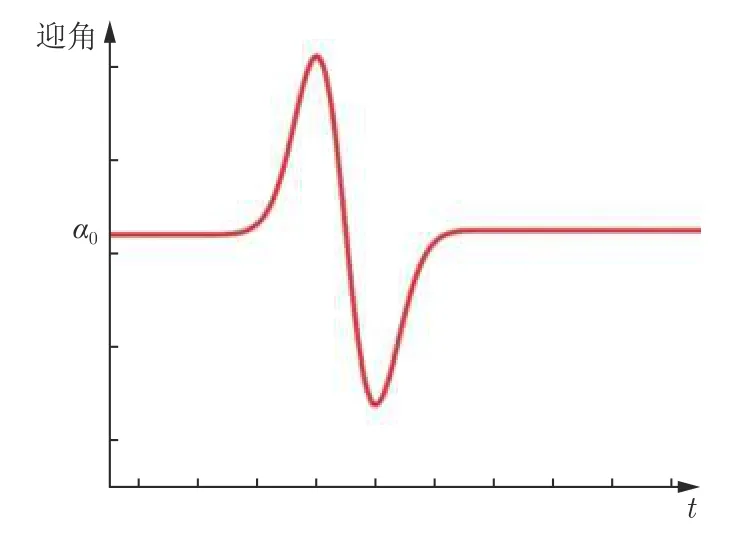
图9 飞行器飞经热上升气流区域时迎角的变化情况Fig.9 Change in angle of attack when an aircraft flying through a thermal updraft

图10 模式切换逻辑Fig.10 Mode switch logic
2.4 虚拟飞行试验方法
虚拟飞行试验在南京航空航天大学回流式低湍流度开口风洞中进行。该风洞开口试验段长度为1.7 m,截面尺寸为1.5 m × 1.0 m,最大稳定风速为30 m/s。虚拟飞行试验模型及安装如图11 所示。模型与模型支撑件以一个多轴承式三自由度机构(图12)连接,该机构可使模型绕俯仰轴和滚转轴转动 ± 30°、绕偏航轴转动任意角度。模型内部留有配重位置,以保证模型重心与转动中心基本重合[25]。
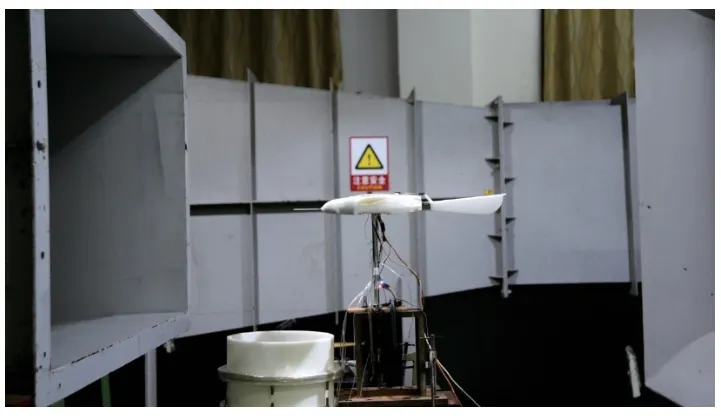
图11 虚拟飞行试验模型及安装Fig.11 Virtual flight test model and installation
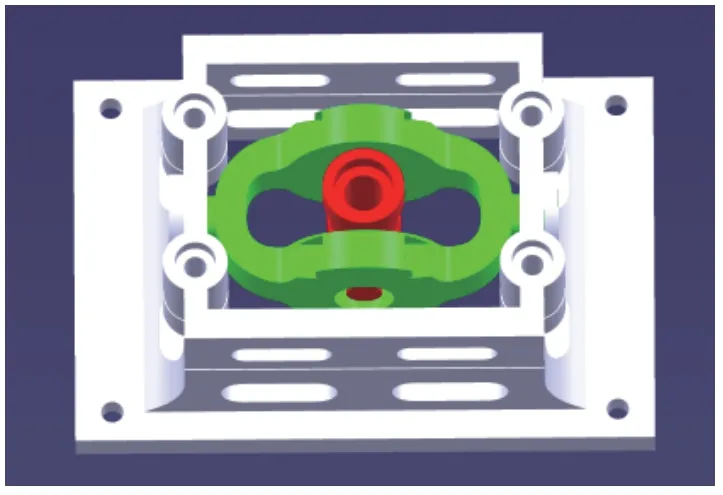
图12 三自由度机构Fig.12 3 DOF structure
飞行器在飞经热上升气流区域的过程中,遇到的热上升气流的速度会先增大后减小。为模拟此现象,将热上升气流模拟装置安装于风洞试验段下部以免影响风洞来流,装置出口尽可能向上对准模型下表面,试验中控制装置产生的气流速度先增大,再减小到某个值后持续一段时间,最后减小到0。
将模式切换逻辑写入飞行控制器,控制热上升气流模拟装置。在试验中,观察模式切换逻辑能否判别热上升气流并自主控制飞行器进入和脱离滑翔模式。据MacGready 的研究[26],飞行器遇到热上升气流时,可以通过盘旋长时间地停留在热上升气流区域。在试验中,当模式切换逻辑判别飞行器应进入滑翔模式时,发送滚转角指令,飞行控制器控制飞行器向一侧滚转;当模式切换逻辑判别飞行器应脱离滑翔模式时,控制飞行器滚转角为0°,以此判别模式切换逻辑的可行性。试验过程中,实时采集记录迎角、姿态角、Soarmode 值等的变化情况。
3 结果与分析
3.1 七孔探针的校准结果
图13 给出了小流动角下(7 区)竖直平面内Cα随α 的变化曲线,图14 给出了小流动角下(7 区)水平面内Cβ随β 的变化曲线。从图中可以看出:2 条曲线的线性都非常好,且都接近经过原点,斜率也基本相同。
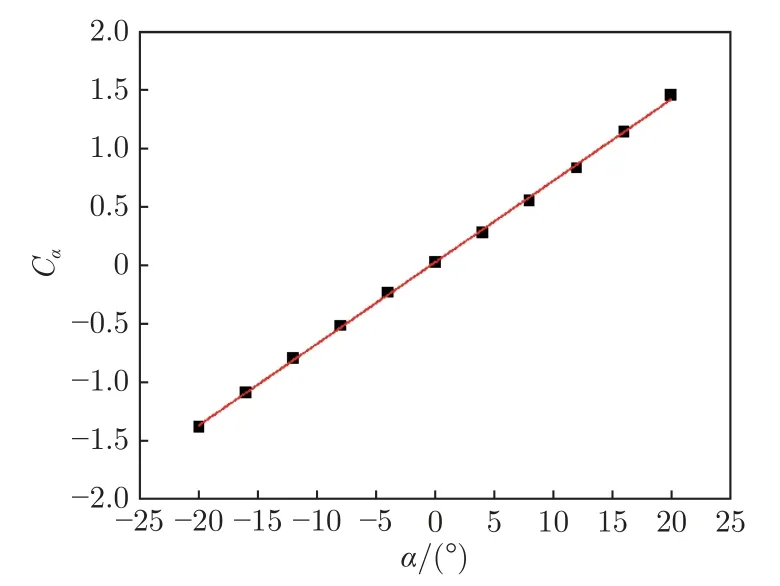
图13 小流动角下(7 区)迎角系数曲线Fig.13 Pressure coefficient curve of angle of attack at small angle(zone 7)
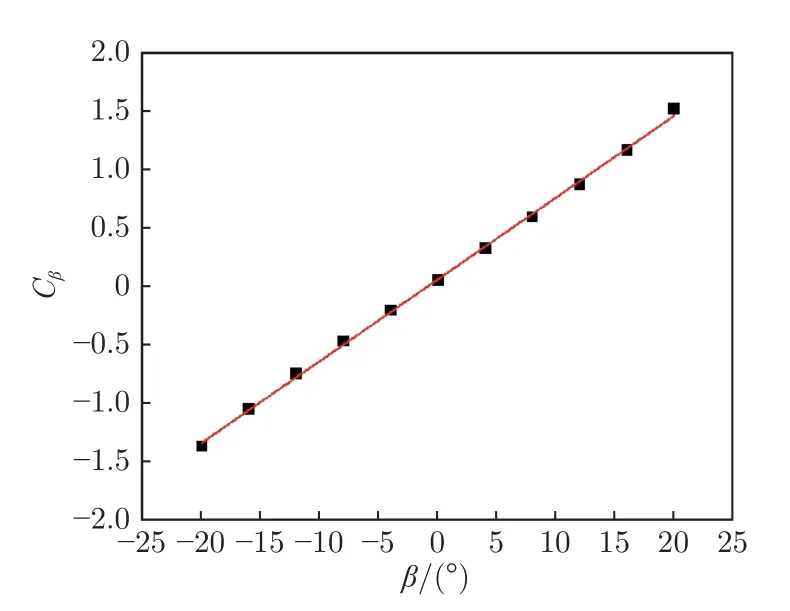
图14 小流动角下(7 区)侧滑角系数曲线Fig.14 Pressure coefficient curve of side slip angle at small angle(zone 7)
图15 给出了大流动角下不同滚转角所对应的1 区Cθ1随θ 的变化情况。从图中可以看出:当24° ≤ θ ≤ 72°时,Cθ1随θ 单调增大;当θ >72°时,Cθ1随θ 的增大而减小,这是由吸力开始减小、压力回升导致的。结果表明所设计的探针可测量72°以内的俯仰角。此外,在θ < 72°的情况下,φ 为155°与205°、165°与195°、175°与185°的曲线基本重合,这表明该区Cθ1~θ 曲线对称性很好。图16 给出了1 区θ=60°时Cφ1随φ 的变化情况。图中Cφ1~φ 曲线线性度较好,且该区中心处(φ=180°)Cφ1≈ 0。其他外区的滚转角系数曲线与1 区基本相似,这有利于多项式的拟合。

图15 大流动角下(1 区)俯仰系数曲线Fig.15 Pitch pressure coefficient curve at high angle (zone 1)

图16 滚转角系数曲线(1 区,θ=60°)Fig.16 Roll pressure coefficient curve (zone 1,θ=60°)
受探针加工和压力传感器温漂、零漂等因素影响,校准结果难免存在误差。根据误差理论,采用试验数据Ae与拟合值Ap之间的标准偏差σ(A)来衡量拟合精度,即:
各区流动参数的偏差分析结果如表3 所示,表中外区流动参数的偏差分析结果是1~6 区的平均值。可以看到:外区流动参数的拟合精度比内区略低,且标准偏差都在较小的范围内。
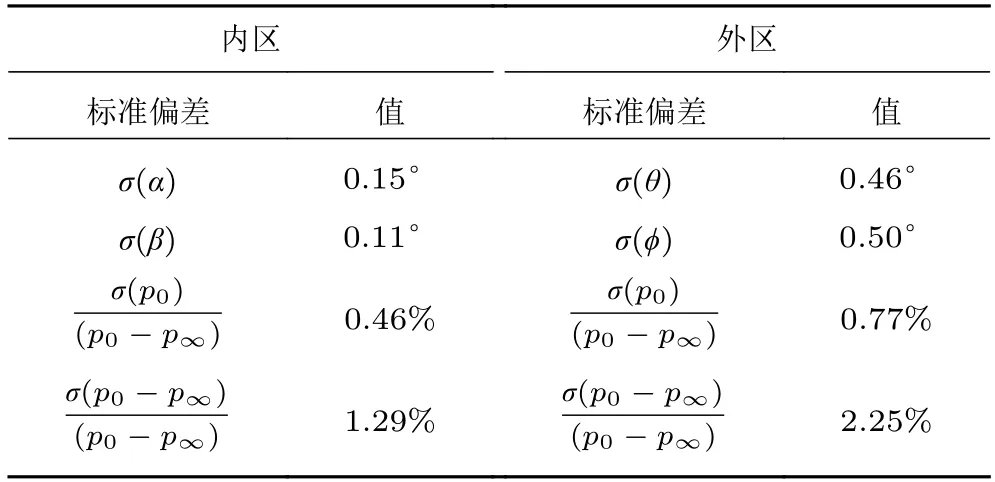
表3 七孔探针校准曲线拟合的标准偏差Table 3 Standard deviation of calibration curve fitting of seven hole probe
3.2 风洞虚拟飞行试验
为观察模式切换逻辑在不同速度的热上升气流下的可行性,开展了风洞虚拟飞行试验。试验中,风洞来流速度为10 m/s,热上升气流模拟装置产生的气流与风洞来流夹角为90°,设置进入滑翔模式的滚转角指令φcmd=11.5°(0.2 rad)。试验中,热上升气流装置模拟3 种不同速度的热上升气流:
气流Ⅰ:气流速度从0 m/s 增大到4.9 m/s,再减小到2.7 m/s,维持一段时间后,减小到0 m/s;
气流Ⅱ:气流速度从0 m/s 增大到8.0 m/s,再减小到4.9 m/s,维持一段时间后,减小到0 m/s;
气流Ⅲ:气流速度从0 m/s 增大到9.8 m/s,再减小到6.6 m/s,维持一段时间后,减小到0 m/s。
图17~19 分别是热上升气流Ⅰ、Ⅱ和Ⅲ的风洞虚拟飞行试验结果,各图的子图(a)是控制热上升气流装置的PWM 信号占空比的变化情况,子图(b)是Soarmode 值的变化情况,子图(c)是迎角和迎角变化率的变化情况,子图(d)是滚转角指令和滚转角的变化情况。

图17 上升气流I 的虚拟飞行试验结果Fig.17 Experimental results of virtual flight of updraft I
从图17(a)可以看出:在约5.8、44.6 s 处,热上升气流装置启动;在约7.8、46.6 s 处,热上升气流装置产生的气流速度达到最大值;在约26.5、64.5 s处,热上升气流装置关闭。从图17(b)可以看出:在约7.8、46.6 s 处,模式切换逻辑的Soarmode 值从0 变为1,触发进入滑翔模式的判别条件;在约29.0、66.8 s 处,Soarmode 值从1 变为0,触发脱离滑翔模式的判别条件。从图17(c)可以看出:在触发进入滑翔模式的这2 个时间点,飞行器迎角α > 4°,当α 从最大值开始减小时,迎角变化率变为负值,触发进入滑翔模式的判别条件;结合图17(a),在热上升气流装置关闭后的27.0~29.0 s、64.8~66.8 s 这2 个2 s 的时间段内,飞行器迎角α 始终小于2.5°,触发脱离条件。从图17(d)可以看出:在进入滑翔模式的这2 个时间点,模式切换逻辑判别飞行器进入滑翔模式,飞行器接收到滚转角指令φcmd=11.5°,向右滚转到11°附近;在脱离滑翔模式的这2 个时间点,飞行器脱离滑翔模式,滚转角回到0°附近。
图18 和19 中也有与图17 相似的现象,这说明在不同速度的热上升气流下,所设计的模式切换逻辑都能够自主控制飞行器进入和脱离滑翔模式。

图18 上升气流Ⅱ的虚拟飞行试验结果Fig.18 Experimental results of virtual flight of updraft Ⅱ
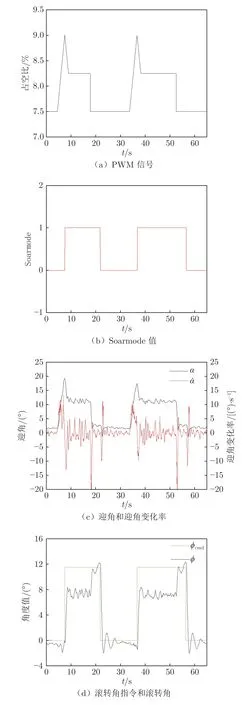
图19 上升气流Ⅲ的虚拟飞行试验结果Fig.19 Experimental results of virtual flight of updraft Ⅲ
为观察所设计的模式切换逻辑在不同滚转角指令下能否控制飞行器自主脱离滑翔模式,开展了风洞虚拟飞行试验。试验中,设置风洞来流速度为10 m/s,热上升气流模拟装置模拟热上升气流Ⅱ(与风洞来流夹角为90°),进入滑翔模式的滚转角指令分别为φcmd=11.5°(0.2 rad)、φcmd=22.9°(0.4 rad)、φcmd=34.4°(0.6 rad)和φcmd=45.8°(0.8 rad)。
图20 为滚转角指令和滚转角随时间的变化情况。可以看到:不同的滚转角指令下,模式切换逻辑都能够成功地控制飞行器自主脱离滑翔模式。

图20 滚转角指令和滚转角随时间的变化情况Fig.20 Change of roll angle command and roll angle with time
比较图17(d)、18(d)和19(d)可以看出:热上升气流的速度越大,进入滑翔模式时的滚转角与滚转角指令的稳态误差越大。从图20 中可以看出:随着滚转角指令的增大,滚转角与滚转角指令的稳态误差越来越大。出现稳态误差的原因是:试验模型的滚转运动通过尾舵的左右偏转控制,但尾舵的左右偏转又会使模型出现偏航运动。
4 结 论
本文针对无人机自主滑翔中的模式切换问题,设计了气流感知系统、热上升气流模拟装置和模式切换逻辑,搭建了风洞虚拟飞行试验平台,得到结论如下:
1)基于七孔探针和嵌入式技术设计的气流感知系统可测量流动角高达72°的气流方向和速度,该系统测得的流动角的标准偏差小于0.5°。
2)所设计的热上升气流模拟装置可模拟10 m/s以下的热上升气流,通过PWM 信号控制装置模拟随时间变化的热上升气流。
3)风洞虚拟飞行试验结果表明:在不同速度的热上升气流作用下,模式切换逻辑都能够控制无人机自主进入和脱离滑翔模式;在不同的滚转角指令下,模式切换逻辑都能控制无人机脱离滑翔模式。因此基于气流感知系统测得的迎角及其变化率所设计的模式切换逻辑能够使无人机在遇到热上升气流时自主进入滑翔模式,在热上升气流消失时自主脱离滑翔模式。
本文所设计的气流感知系统和模式切换逻辑可应用于通信中继、监视和侦察等小型固定翼无人机,使其能够在进行巡航任务时利用环境中出现的热上升气流节省能量,提高续航能力。
猜你喜欢
学苑创造·A版(2024年5期)2024-06-10 21:55:57
军民两用技术与产品(2021年7期)2021-10-13 08:12:20
北京航空航天大学学报(2021年6期)2021-07-20 07:23:52
小哥白尼(野生动物)(2020年3期)2020-07-27 01:54:04
数学大王·中高年级(2018年11期)2018-12-17 08:13:54
测控技术(2018年10期)2018-11-25 09:35:58
小学时代(2017年16期)2017-06-19 19:33:19
百科探秘·航空航天(2015年10期)2015-11-07 07:05:17
科技传播(2014年4期)2014-12-02 01:59:42
实验流体力学(2011年5期)2011-01-14 01:25:24