
基于Lugre摩擦模型转向系统建模及精度验证
2023-07-10 06:19梅光焕孙福禄辛庆锋于阳杜伟
时代汽车 2023年11期
关键词:仿真
梅光焕 孙福禄 辛庆锋 于阳 杜伟

摘 要:在当前的车辆开发中,转向力的目标主要靠后期实车调校来实现,究其原因是仿真模型对转向力矩的表达不够准确。本文介绍了转向系统摩擦特性的测试方法,并采用Lugre摩擦模型进行参数辨识,利用Simulink搭建转向系统及摩擦模型,通过仿真与试验对比,验证了转向系统对于力矩表达的精确性,为未来虚拟标定、虚拟调校等提供支撑。
关键词:转向系统摩擦 Lugre摩擦模型 Simulink 仿真
Steering System Modeling and Accuracy Verification Based on Lugre Friction Model
Mei Guanghuan,Sun Fulu,Xin Qingfeng,Yu Yang,Du Wei
Abstract:In the current vehicle development, the goal of steering force is mainly achieved by the later actual vehicle tuning, because the simulation model does not express the steering torque accurately. This paper introduces the test method of friction characteristics of the steering system, uses the Lugre friction model for parameter identification, uses Simulink to build the steering system and friction model, and verifies the accuracy of the torque expression of the steering system through simulation and test comparison, so as to provide support for future virtual calibration and virtual adjustment.
Key words:steering system friction, Lugre friction model, Simulink, simulation
1 引言
随着汽车研发技术的不断进步,开发者在车辆开发过程中对汽车的手感表达提出明确的要求,准确的手感模拟使得转向虚拟调校成为可能。转向机构中的转向传递结构、助力电机、转向器等部件的摩擦力对转向手感及车辆的回正性能影响较大,因此正确的表述系统中的摩擦等作用力显得至关重要。
本文首先根据Lugre模型的特性进行了转向系统摩擦试验,测试了不同部件的摩擦力/力矩,然后对各部件的摩擦进行辨识,得到相关的辨识参数。通过Simulink搭建了包含各部件摩擦的转向系统模型,同时进行了仿真,与实测数据进行对比分析,验证了模型的准确性,可为后续转向系统的设计开发提供理论依据及实践借鉴意义。
2 Lugre摩擦模型
Lugre摩擦模型在Dahl模型的基础上进行了提升。其将鬃毛模型引入到其中,能够全面的描述摩擦的静态及动态特性,同时能够反映出在实际中所能观测到的大多数摩擦现象,例如Stribeck效应、Dahl效应、粘滑现象、预滑动位移、摩擦记忆、变化的最大静摩擦力及类似于弹簧力的静摩擦力等。[1]
Lugre模型与鬃毛模型的不同之处在于,鬃毛模型描述的是摩擦的隨机行为,而Lugre模型是基于鬃毛的平均变形来建模,鬃毛的平均变形用z表示,则摩擦力可表示为:
(1)
(2)
(3)
其中,v—两摩擦表面的相对滑动速度;Fc—库伦摩擦力/力矩;Fs—最大静摩擦力或者力矩;vs—Stribeck速度;σ0—鬃毛的刚度;σ1—鬃毛阻尼系数;δs—Stribeck指数;σ2—粘性阻尼系数[2]。Lugre摩擦模型的Simulink模型。
3 转向系统性能测试及辨识
3.1 转向系统性能试验
转向系统摩擦阻尼主要存在与转向管柱与转向器中,因此在进行测试时,将转向系统分为两部分进行测试,另根据建模与验模的需求,将转向系统刚度进行分段测试,并将整个转向系统摩擦试验数据用于仿真精度验证。
本次大部分试验均在MTS五轴转向系统试验台上进行,每种工况进行了相关的夹具设计制造,试验台如图1所示。在对转向系统进行按照安装之前,首先在整车上对转向系统关键硬点进行扫描,测出转向系统在整车坐标系下的相对位置。在进行转向性能测试时,转向系统按照测得的实车坐标进行安装,从而确保测试数据的有效性[3]。工况如表1所示。
按照表1的试验工况及步骤对本次研究的C-EPS转向系统进行测试,并将测试结果在matlab软件中进行滤波、拟合等处理。部分性能试验处理结果见表2。
3.2 转向系统摩擦阻尼辨识
最小二乘法具有辨识程序简单、辨识速度快、辨识效果好等优点,因此本次转向系统摩擦阻尼参数采用最小二乘法进行辨识。
最小二乘法辨识目标是求取能够使得全局残差平方和最小的一组参数,目标函数为[4]~[5]:
(4)
其中,xij为试验数据,yi为测试的摩擦瞬态值;aj为辨识的参数。
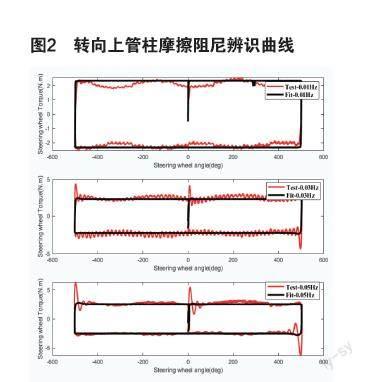
按照转向上管柱摩擦阻尼试验工况,对方向盘转角加载频率为0.01Hz、0.03Hz、0.05Hz三组数据进行辨识,下图中力/力矩曲线波动部分为系统空间位置布置、部件装配运动关系本身导致的,不属于摩擦力/力矩,因此摩擦辨识时不需要关注,Lugre摩擦阻尼参数辨识结果见表3。
转向器摩擦阻尼整体上对齿条位移加载频率为0.01Hz、0.03Hz、0.05Hz三组数据进行辨识,辨识参数见表3。
4 转向系统参数化建模及验证
4.1 转向系统模型搭建
本次主要研究C-EPS转向系统的机械摩擦,因此助力电机处于未开启状态。模型的搭建纪仿真则采用Matlab Simulink软件进行。
C-EPS电动助力转向系统示意图如图3所示,根据牛顿运动定律,转向系统各部件微分方程[6]~[8]如下:
上管柱微分方程:
(4)
其中,为方向盘力矩;为助力矩;为转向上管柱阻尼;为方向盘转角;为上管柱的旋转角度;为上管柱的扭矩;为上管柱的摩擦力矩;为上管柱及方向盘惯量。
下管柱微分方程:
根据能量守恒原则,下管柱力矩计算公式如下:
(6)
其中
式中,α1为输入轴与中间轴轴线相交所形成的锐角,α2为小齿轮输出轴与中间轴轴线相交所形成的锐角;β为输入轴、中间轴、输出轴两两平面的夹角;中间轴两端节叉轴线的夹角为相位角ψ[9]~[10]。
转向器齿轮齿条部分微分方程:
(7)
式中,Tlc为下管柱扭矩;rp为小齿轮半径;为齿条质量;xR齿条位移;FR齿条外力;fR齿条摩擦力。
根据表3辨识的摩擦模型参数、公式1-3及公式5-7,利用Matlab/Simulink软件搭建转向系统模型,其中转向助力为0,搭建好的转向系统模型如图4所示[11]。转向上管柱刚度、转向下管柱刚度、转向器线角比则采用1-D插值的方法嵌入。
4.2 转向系统仿真验证
本章节利用搭建好的转向系统Simulink模型,模拟转向性能试验进行转角频率为0.01Hz、0.03Hz、0.05Hz摩擦工况仿真,转角仿真幅值为500deg。曲线精度验证结果如图5所示,由对比验证曲线可以看出转向系统模型仿真精度较高。
转向系统模型精度计算公式采用均方根误差。模型平均精度为89.38%。验证时增加了转角频率0.02Hz、幅值30deg工况,其精度较差为84.01%,小角度波动模拟效果差,后续研究可考虑助力电机内摩擦、转向万向节处摩擦等更多因素。
5 结语
(1)本文对转向性能各个试验工况进行了详细的介绍,包括部件装夹形式、试验条目、加载形式、数据采集等。
(2)本文根据试验工况及数据对转向管柱、转向器摩擦进行了参数辨识,得到建模需要的参数,并对其它性能(转向刚度、线角比等)数据进行处理。
(3)本文利用Matlab/Simulink软件搭建了转向系统模型,其中包括转向摩擦建模、转向刚度建模、转向线角比建模及系统本身传统关系建模。
(4)基于转向系統摩擦阻尼特性试验数据及试验方法以及搭建好的转向系统Simulink模型,进行了不同转角频率、幅值工况的仿真,并与试验数据进行对比,验证了转向系统模型的准确。
参考文献:
[1]原大宁,刘丽兰,刘宏昭,等.滑动摩擦模型研究现状[J].系统仿真学报,2009(4).
[2]庄晔,郭孔辉.基于Lugre模型的轮胎原地转向模型[J].汽车技术,2008(7).
[3]刘芳,韩杰,曹娇娇,许书超.电动助力转向系统精细化建模与验证[J].机械设计与研究,2021(5).
[4]赵金生,张帆,刘品宽.基于Lugre模型的直线电机摩擦参数辨识和补偿[J].机电一体化,2016(3).
[5]钟志峰,周东平,张艳等.基于最小二乘法的混合推荐模型研究[J].现代电子技术,2022(17).
[6]李小龙,任凯.基于ESF摩擦模型的电动助力转向系统建模与分析[J].上海汽车,2018(1).
[7]曹艳玲,聂骏.电动助力转向系统建模分析与参数化研究[J].中国农机化学报,2016(2).
[8]钱学武,马明星,徐国民,管延才.电动助力转向系统建模与仿真[J].重庆理工大学学报,2010(3).
[9]潘宇,何云峰,谢卫佳等.ADAMS在汽车双十字轴万向节转向传动系统优化设计中的应用[J].机械传动,2016(4).
[10]张学斌.基于MATLAB对转向力矩波动的应用研究[J].汽车实用技术,2020(7).
[11]何字满,顾梦妍.基于MATLAB Simulink的电动助力转向系统控制算法仿真研究[J].传动技术,2011(4).
猜你喜欢
中国教育技术装备(2016年20期)2016-12-12
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技资讯(2016年18期)2016-11-15
科技资讯(2016年18期)2016-11-15
价值工程(2016年29期)2016-11-14
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
企业导报(2016年6期)2016-04-21
