拓扑地图的路口局部路径生成策略
2023-07-08 10:10:18王玉龙张剑锋覃小艺
汽车实用技术 2023年12期
王玉龙,张剑锋,闵 欢,覃小艺,李 智
拓扑地图的路口局部路径生成策略
王玉龙1,2,张剑锋1,闵 欢1,覃小艺1,李 智1
(1.广州汽车集团股份有限公司汽车工程研究院,广东 广州 510641;2.湖南大学汽车车身先进设计制造国家重点实验室,湖南 长沙 410082)
交叉路口是自动驾驶开发过程中面临的复杂交通场景,采用高精度地图方案成本高昂,而仅通过车载传感器难以有效识别路口形状,因此,提出了一种基于开源拓扑地图与视觉可行驶区域检测技术的路口局部路径规划算法。首先,基于开源拓扑地图采用A*算法规划全局导航路径作为引导线,然后通过语义分割技术识别当前可行驶区域,并结合车辆实时定位信息,在路口确定局部路径的起点、终点与一组备选控制点,最后采用贝塞尔曲线插值方法,得到备选路径的曲线簇,根据多维度加权代价函数结果选取最优局部路径,进而实现车辆在路口转弯过程的自动驾驶。实验结果表明,该策略能够在不依赖高精地图的情况下,在路口处有效规划出局部路径,提高自动驾驶车辆在路口处的通过能力,路口通过率可达99%。该策略不依赖高精地图和激光雷达,对于自动驾驶量产降本具有重大意义。
自动驾驶;局部路径规划;交叉路口;拓扑地图;计算机视觉
自动驾驶汽车的研究是世界交通运输领域的前沿,路径规划是其中的重点和难点。当前主流的路径规划方案是依赖高精地图和激光雷达[1-3],利用完备的道路环境信息进行全局和局部路径规划。高精地图具有完备的道路结构化信息,简化了路径规划的复杂度,但存在高精地图制作困难、使用维护成本高等问题。
针对路口场景,由于缺少车道线等结构化信息,且路口形状复杂,使得路口的局部路径规划变得异常困难。MOREAU J等人[4]采用非线性运动学车辆模型和贝塞尔曲线进行路口局部路径规划,将其转化为优化问题进行规划路径的求解。李飞琦等人[5]则通过建立高精度先验地图数据库,并利用多项式拟合的策略生成路口轨迹。这些方法都是基于已有的精确参考路径的前提下,根据车辆的位置进行路径跟随,对地图精度要求高。
但高精度地图由于采集、标注工作量极大,使用成本较高,基于视觉和非高精度地图的自动驾驶方案会有更大的量产可能性。路径规划需要获取道路信息,通过对视觉传感器获取的道路图像进行语义分割,能够提取路面信息,检测出当前可行驶区域。语义分割通常采用全卷积神经网络(Fully Convolutional Networks, FCN)、扩张卷积等深度神经网络模型,近年来又发展出采用最小监督和对抗模型等策略的语义分割算法。同时,道路级精度的导航地图也在自动驾驶研究中得到应用。AWANG等人[6]提出使用开源街景地图(Open Street Map, OSM)与视觉里程计进行全局定位,BALLARDINI A L等人[7]则提出基于图像语义分割与电子地图的匹配进行路口定位的方法。
综上所述,研究不依赖高精地图且能够靠低成本视觉感知进行实时路径规划的算法具有重要的现实意义。本文针对路口转弯这一困难场景,采用开源的OSM地图稀疏拓扑地图获取全局导航路径,为局部路径提供方向指引,能够摒弃高精地图依赖。同时利用视觉传感器识别当前路段的可行驶区域,结合定位信息实时规划出一条可安全、平滑地通过路口的局部路径,具有成本低、方案灵活、鲁棒性高等优点。
1 路口局部路径生成策略
1.1 路口局部路径生成总体方案
本文使用开源的OSM地图,利用A*算法规划全局导航路径,然后通过图像语义分割技术识别车辆可行驶区域。A*算法是一种高效的启发式搜索算法,是静态路网中求解最短路径最有效的直接搜索方法,原理是通过估算节点的代价评估函数值并作为节点的代价值,选取代价值最小的节点作为下一个需要遍历的节点,逐步找到最优路径。结合组合导航获取的实时定位信息,在路口寻找局部路径的起点、终点和一组备选控制点。采用贝塞尔曲线插值方法,得到备选路径的曲线簇。通过计算加权多目标代价函数,选取最优的局部路径曲线。最后以固定间距插值得到局部路径的路点集,输出给自动驾驶汽车的决策和控制模块,进而实现车辆在路口转弯过程的自动驾驶。总体方案如图1所示。
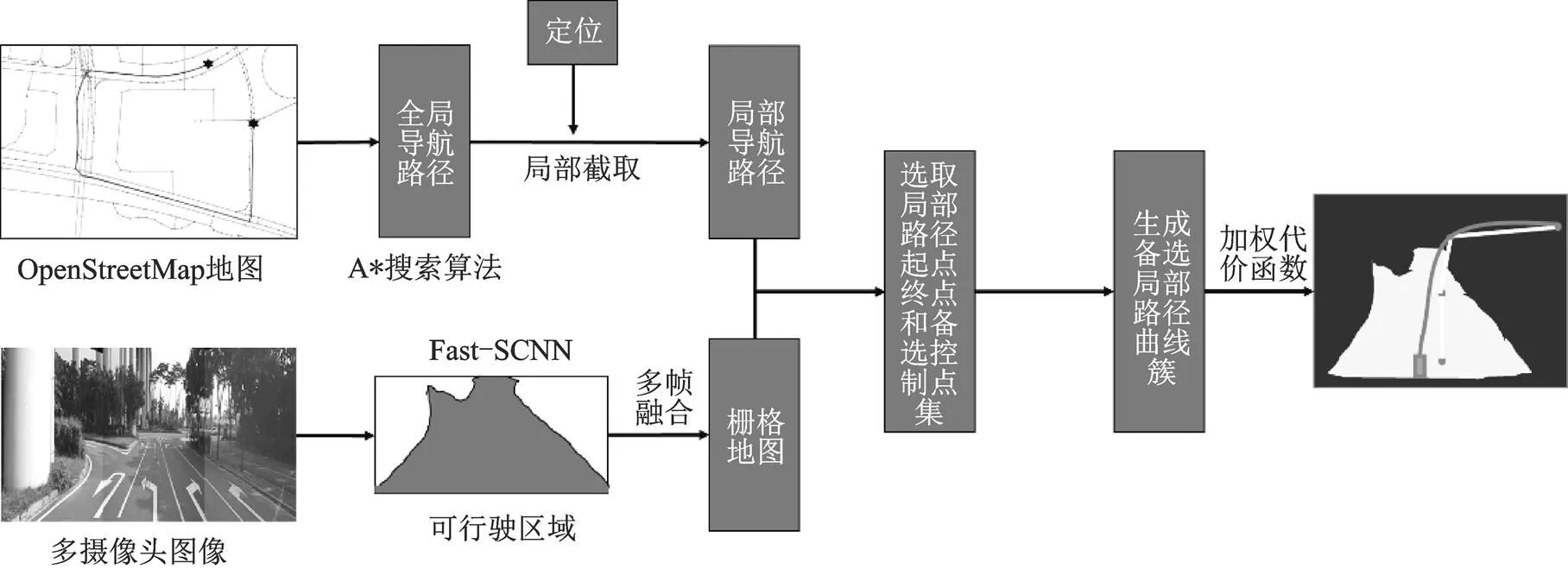
图1 路口局部路径生成总体方案
1.2 全局导航路径规划
自动驾驶需要依赖地图进行全局路径规划,本文采用一种弱拓扑先验的OSM地图。OSM地图是由节点(node)、路径(way)和关系(relation)构成的数据体,通过设置全局导航路径的起点和终点,可以规划出一条仅包含稀疏路点的最短全局导航路径,图2为OSM地图元素及规划的最短全局导航路径,其中圆点为OSM地图的稀疏节点,细线是路径,粗实线则是根据起点和终点规划的最短全局导航路径{0,1,…},其中0,1,…为节点编号。

图2 OSM地图元素及最短全局导航路径
1.3 可行驶区域感知
可行驶区域感知意在识别出自车所在位置周边的道路路面,确定车辆可通行的区域,为自动驾驶提供路径规划辅助。可行驶区域可通过对激光雷达获取的点云数据或摄像头获取的图像数据进行特征提取得到。激光点云方案具有良好的测距精度,然而对没有路肩或护栏的道路边界检测效果较差,因此,本文采用视觉感知的方案识别可行驶区域。
通过车辆上安装的前向3路摄像头采集车辆周围的环境图像,利用深度学习的语义分割算法检测可行驶区域。本文采用开源语义分割算法Fast-SCNN[8],同一时间戳的3个摄像头采集的3幅图像以批数据形式输入模型,并且输出类别仅保留“道路”,得到3幅图像中道路掩码,根据掩码提取出道路边缘点集。
将一副图像上的边缘点集投影到车辆坐标系下,并将投影后的点集相连形成封闭多边形,则封闭多边形内部区域即为可行驶区域。将多路摄像头所获取的可行驶区域进行叠加,能够得到更大视野的可行驶区域,提取融合后的可行驶区域的边界即可得到可行驶区域边缘点。
根据自车定位信息,可将可行驶区域边缘点转换到世界坐标系下。在世界坐标系下,将当前帧的可行驶区域叠加到历史可行驶区域上,即可得到连续帧的可行驶区域,创建出包含历史信息的可行驶区域。连续帧融合的可行驶区域可对一些运动物体遮挡的区域进行覆盖,得到更完整的可行驶区域。最后将可行驶区域转换为二值图,并调整分辨率,最终得到局部栅格地图。提取可行驶区域的边界点,组成可行驶区域边界点集{0,1,…}。图3是多摄像头融合的可行驶区域感知结果,其中图3(a)是前视3路摄像头获取的图像语义分割结果,图3(b)是同一时间戳下3幅图像融合后的可行驶区域,图3(c)是经过连续帧融合后的栅格地图,图3(d)是该路口的航拍图。

图3 可行驶区域感知结果
1.4 局部路径规划
由于贝塞尔曲线具有路径平滑、曲率连续的特点,适合作为局部路径规划的曲线,因此,采用贝塞尔曲线进行局部路径规划。

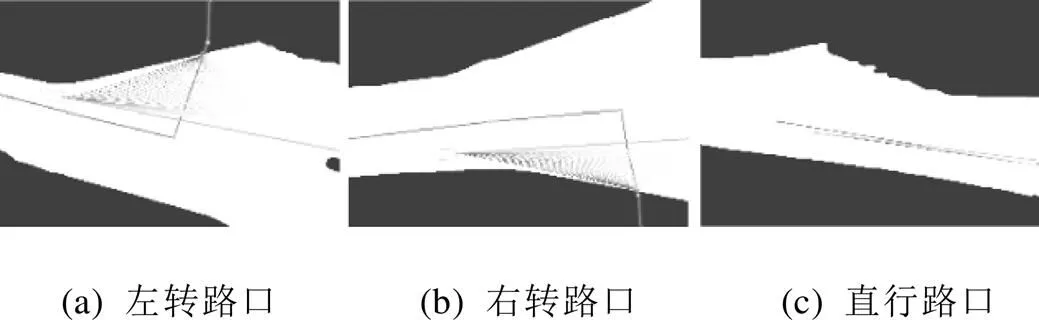
图4 路口备选局部路径曲线簇
为选择最优的局部路径,采用加权多目标代价函数计算每条备选路径的代价。代价函数考虑路径可通行能力、跟随全局路径的能力、路径长度以及路径平滑性,设计了路径可通行代价函数p、跟随全局路径代价函数f、路径长度代价函数d以及路径平滑代价函数s。
路径可通行能力考虑路点与可行驶区域边缘的最短距离,路点离可行驶区域边缘越远,通行性越高,行驶越安全。采用符号距离函数计算路点与可行驶区域边缘的距离,其表达式如式(1)所示:

式中,为可行驶区域;c为的补集,指非可行驶区域;∈为路点在可行驶区域内;∈c为路点在可行驶区域外;(,)为路点到可行驶区域的最短距离。因此,路径可通行代价函数p计算公式如式(2)所示:

跟随全局路径的能力考虑局部路径对导航路径的跟随性,局部路径所有路点至导航路径的距离之和越小,跟随性越高,因此,跟随全局路径代价函数f计算公式如式(3)所示:

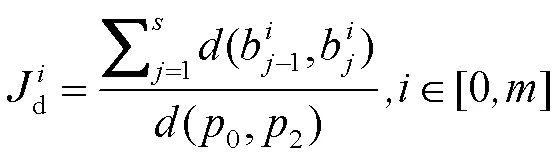
一般认为局部路径的长度越短越好,能有效减少行驶里程。因此,路径长度代价函数d的计算公式如式(4)所示:
路径平滑性通常由曲线的曲率决定,曲率越小,路径越平滑。因此,路径平滑代价函数s的计算公式如式(5)所示:
综上所述,备选路径的加权多目标代价函数计算公式如式(6)和式(7)所示:



通过上述优化方法求得最优局部路径后,以0.5 m为间隔插值得到局部路径的路点集。路径规划效果如图5所示,其中实线条为全局路径规划获取的当前导航路径,虚线为路口最优局部路径。

图5 局部路径规划结果
2 实车测试
本文以广州大学城部分路口为测试对象,采用广汽传祺GE3电动车作为试验车平台,实现横纵向自动控制。平台车搭载了组合导航设备及3路前视摄像头,其中3路摄像头视场角均为60°,两侧向摄像头与中间摄像头夹角均为45°,融合后的有效视场角约150°,有效扩大了系统的可视范围。
测试过程为实车道路测试,在广州大学城随机选取路口,根据人工干预次数及乘员的主观感受进行评测。分别测试了左转、右转和直行路口场景下,根据局部路径规划所得路点进行自动驾驶的通过情况。实验共选择了30个路口进行测试,其中9个右转路口,11个左转路口,10个直行路口,每个路口测试3次,总体路口转弯成功率达到100%,测试实拍如图6所示,具体测试结果见表1。乘员总体乘坐感受是行驶较为平顺,但由于导航路径有且仅有一条且不包含车道信息,在多车道路口行驶时会使规划的局部路径往导航路径靠拢,有时会导致车辆存在较大幅度的横向偏移,对其他车辆行驶造成一定影响。

图6 路口实车测试实拍图
表1 路口实车测试结果统计
测试场景路口数量测试次数总测试次数接管次数成功次数成功率 右转10330030100% 左转1133313297% 直行9327027100% 合计3039018999%
3 结论
1)本文对低成本自动驾驶方案进行了探索,提出一种基于开源地图与视觉感知进行路口局部路径规划的算法,创造性地利用视觉可行驶区域感知与道路级导航融合进行局部路径规划,摆脱了路径规划对高精度地图的依赖。
2)在路口处,采用贝塞尔曲线进行局部路径拟合,以全局道路路径作为指引,在可行驶区域内生成曲线簇,通过加权多目标代价函数求取最优的曲线作为局部路径供自动驾驶车辆跟随,对动态路况具有很好的鲁棒性,保障车辆安全通过路口。
3)由于交叉路口往往有错综复杂的障碍物运行轨迹,因此,下一步还需将周围的障碍物信息加入局部路径规划中一起考虑,提出更加鲁棒的路口局部路径规划算法。
[1] 宋若旸,阙海霞,马宗钰,等.基于改进RRT*算法的自动驾驶车辆路径规划研究[J].汽车实用技术,2021,46 (1):20-22.
[2] 刘亮.基于激光雷达的结构化道路环境感知及避障路径规划方法研究[D].西安:长安大学,2021.
[3] 王美玲,潘允辉.基于GIS与约束条件下的最优路径规划研究[J].北京理工大学学报,2016,36(8):851-856, 861.
[4] MOREAU J,MELCHIOR P,STÉPHANE V,et al.Reac- tive Path Planning in Intersection for Autonomous Vehicle[J].IFAC-PapersOnLine,2019,52(5):109-114.
[5] 李飞琦,鲍泓,潘峰等.智能车导航中的路口轨迹生成策略[J].计算机工程,2018,44(7):25-31.
[6] AWANG SALLEH D N S D,SEIGNEZ E.Swift Path Planning:Vehicle Localization by Visual Odometry Trajectory Tracking and Mapping[J].Unmanned Sys- tems,2018,6(4):221-230.
[7] BALLARDINI A L,CATTANEO D,SORRENTI D G.Visual Localization at Intersections with Digital Maps[C]//2019 International Conference on Robotics and Automation (ICRA).Montreal:IEEE,2019:6651- 6657.
[8] POUDEL R P K,LIWICKI S,CIPOLLA R.Fast-SCNN: Fast Semantic Segmentation Network:202010619356. 9[P].2019-02-12.
Local Path Generation Strategy of Intersection Based on Topology Map
WANG Yulong1,2, ZHANG Jianfeng1, MIN Huan1, QIN Xiaoyi1, LI Zhi1
( 1.Auto Engineering Research Institute, Guangzhou Automobile Group Company Limited,Guangzhou 510641, China; 2.State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body, Hunan University, Changsha 410082, China )
Intersection is a complex traffic scene in the development of autonomous driving. The cost of using high-definition map scheme is high, and it is difficult to effectively identify intersection shape only by vehicle sensors. Therefore, an intersection local path planning algorithm based on open source topology map and vision is proposed. First, uses the open source topology map to plan the global navigation path which was used as a guide line. Then, semantic segmentation technology is used to identify the freespace in the visual image. At the same time, the local path’s starting point, end point and control points are determined by combining the real-time positioning information of the vehicle at the intersection. Finally, bazel curve interpolation method is used to obtain the curve cluster of alternative paths, and the optimal local path is selected according to the result of the multi-dimensional weighted cost function. Then realizes the autonomous driving of the vehicle in the process of turning at the intersection. Experimental results show that the proposed strategy can effectively plan local paths at intersections without relying on high precision maps and improve the ability of autonomous vehicle to pass at intersections. The passing rate at intersection can reach 99%.
Autonomous vehicles; Local path planning; Intersection; Topology map; Computer vision
U463.3
A
1671-7988(2023)12-39-05
王玉龙(1988-),博士,工程师,研究方向为人工智能与自动驾驶,E-mail:wangyulong@gacrnd.com。
湖南大学汽车车身先进设计制造国家重点实验室开放基金资助项目(31825011)。
10.16638/j.cnki.1671-7988.2023.012.008
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:07:12
数学物理学报(2022年2期)2022-04-26 14:08:04
中学生数理化·七年级数学人教版(2022年11期)2022-02-22 22:13:22
数学物理学报(2021年2期)2021-06-09 08:54:42
金桥(2018年4期)2018-09-26 02:24:54
海峡姐妹(2017年12期)2018-01-31 02:12:22
作文与考试·初中版(2017年12期)2017-04-19 20:24:45
发明与创新(2016年38期)2016-08-22 03:02:50
艺术生活-福州大学厦门工艺美术学院学报(2016年3期)2016-07-31 19:42:13
中学生(2015年12期)2015-03-01 03:43:53