
无线恒功率充电智能循迹小车的设计
2023-06-25 05:30:05何鑫鑫
现代信息科技 2023年8期
关键词:无线充电

摘 要:文章以2021年江苏省机器人大赛中的节能耐力赛为背景,搭建一种基于超级电容的无线恒功率充电小车,小车通过特定频率的谐振线圈从铺设在地面上的发送线圈接收谐振信号,并将谐振后的交流电整流成直流电供整车使用。采用STM32F407芯片作为小车的主控芯片,通过恒功率控制算法向小车上的法拉电容组充电。该文对其中所涉及的无线接收模块、恒功率模块、超级电容模块等进行了设计,实现了小车的节能运行,最后通过实验验证了恒功率充電的优越性。
关键词:无线充电;超级电容;恒功率;STM32F407
中图分类号:TM910.6 文献标识码:A 文章编号:2096-4706(2023)08-0056-04
Abstract: Based on the energy conservation endurance race in the 2021 Jiangsu Robotics Competition, this paper builds a wireless constant power charging car based on super capacitor. The car receives the resonance signal from the transmission coil laid on the ground through the resonance coil with a specific frequency, and rectifies the resonant AC power into DC power for the whole vehicle. STM32F407 chip is used as the main control chip of the car, and the Farad capacitor bank on the car is charged by constant power control algorithm. In this paper, the wireless receiver module, constant power module and super capacitor module involved are designed to realize the energy-saving operation of the car. Finally, the advantages of constant power charging are verified by experiments.
Keywords: wireless charging; super capacitor; constant power; STM32F407
0 引 言
在环境问题和能源问题日益严峻的当下,国家大力推动新能源汽车产业的发展。目前,电动汽车的发展技术已经成熟,并进入大规模商用阶段,这也势必会为多样化充电技术带来发展机遇。在众多的充电技术中,无线充电技术的发展日新月异,该项技术的主要工作原理是磁共振耦合,即在发送电路和接收电路之间建立磁场,以磁场为介质传输电能。与传统的有线充电技术相比,这种充电方式更加高效便捷,也更为安全可靠。但在之后大约100年的时间里,这项技术并没有得到充分的应用。直到近年来超级电容的广泛应用,才让无线充电技术得以重新发展。超级电容作为一种新型的能量存储介质,具有充放电速度快、功率密度高、循环使用次数多等优点,在很多领域逐渐取代传统蓄电池[1]。
本文设计的自动循迹小车使用超级电容作为储能介质,给出其主控系统、恒功率控制系统、稳压模块的设计原理,并搭建出实物进行实验验证。
1 系统整体方案
本系统主要分为硬件部分和软件部分。其中,STM32F407主控系统模块负责系统的整体运算。无线电能接收模块负责从发射线圈接收能量。整流稳压模块负责将整车接收到的电能转换成直流电压,同时对直流电压进行降压处理,给其他模块充电。超级电容保护模块负责储存能量和释放能量。电磁循迹模块使小车按照特定的路线行进。直流电机控制模块是整车的执行机构。软件部分使用Cubemx和MDK5编译器配置编写,主要分为恒功率控制部分、电磁循迹部分和电机控制部分。
本次比赛中所使用的无线发射端为一个640 kHz的发射线圈,其发射的最大功率为30 W。系统接收模块以LC串联谐振方式从发射线圈吸收特定频率的电能,随后将电能整流成直流电,并在STM32F407主控系统模块的控制下,以恒定功率为超级电容组充电,直至电量充满为止。在充电的同时,部分电能通过DC/DC稳压模块向其他模块供电,以保证系统的正常运行。系统充满电后,最小系统模块根据电磁循迹模块反馈而来的信息,驱动电机控制模块,使小车沿预定轨迹行驶。系统整体设计框图如图1所示。
2 理论计算
2.1 电容储能公式
根据电路原理以及电容充电电压和充电功率的关系可得电容储能公式:
其中:W(t)表示电容中所获取的总能量,单位为焦耳J;P表示电容充电功率,单位为瓦W;C表示电容的容量值,单位为法F;Uc(t)表示电容两端的电压值,单位为V。
将式(1)进行转换可以得到电容两端的电压Uc(t)和功率、时间以及电容大小的关系式:
根据调查可知,目前市面上推出的超级电容,其单体容量大约为0.1 F到几千F不等,常见的单体耐压值有2.5 V、2.7 V和5.5 V左右[2]。为满足此次比赛的需求,我们选择5个容量为10 F、单体耐压2.7 V的超级电容进行串联,形成一个超级电容组,作为整车的能量来源。由电容串联计算公式可知,电容组的整体容值为2 F,耐压值为13.5 V。
2.2 恒功率充电PID算法理论基础
本次比赛所设计的系统,采用传统的PID算法对电容进行充电,以维持充电功率在整个过程中的恒定。
在PID算法中,Kp、Ki、Kd的选择十分重要,它们决定着系统的稳定性和灵敏性[3]。
根据电容充电电路数学模型,建立PID控制器的传递函数:
其中:Kp表示比例控制系数,Ki表示积分控制系数,Kd表示微分控制系数。
2.2.1 Kp的作用
系统输入量和给定量的偏差值成倍放大。由于误差被放大,后级调节部分会迅速对该误差做出响应,试图减小误差。比例系数越大,系统调节的速度就越快。但如果所选择的比例系数过大,则会使系统产生较大的震荡,无法稳定下来。
2.2.2 Ki的作用
使系统的稳态误差逐步消失。一旦系统的输入量和给定量有误差产生,积分调节就会立马起作用,直至误差消失。在实际工程中我们需要设置饱和值,使得积分调节输出一个常值。积分时间常数Ti决定积分作用的强弱,Ti越小,积分作用就越强,反之亦然。引入积分调节可使系统的稳定性下降,动态响应变慢。
2.2.3 Kd的作用
对偏差的变化率进行预测能够做到超前调节,我们可以基于该系数来改善系统的动态性能。选择合适的微分系数,可以减少超调量的大小及调节时间。但是微分环节对噪声干扰比较敏感,因此该环节的微分系数选择要慎重。应当根据不同的控制目的选取不同的组合。例如,电机速度闭环采用PI控制算法,位置闭环则采用PD算法。若在位置控制中加入积分,则会使小车响应速度变慢,甚至会导致控制系统不稳定。
为了便于在STM32中进行PID算法的离散运算,我们将传递函数G(s)进行拉氏反变换,得到其所对应的时域函数:
其中:G(t)表示比例项、积分项和微分项的叠加。ep(t)表示实际充电功率和预定充电功率的偏差。
3 硬件电路设计
本系统的搭建主要是围绕高效率的电能接收和转换而进行的。由于直流电机驱动模块和电磁循迹模块的技术比较成熟,选择成品模块进行组装。这里重点阐述系统中的无线接收电路、整流电路、稳压电路、恒功率充电电路、超级电容保护电路等的设计。
3.1 超级电容组保护电路的设计
由于生产工艺和电容材料特性等客观原因,电容组在充电的过程中,每个电容上的电压值不可能都保持一致。为了避免电容由于分压不均匀而造成过压,我们在硬件电路设计中加入了基于BW6101的保护电路,使电容组中的电容在充电过程中始终保持电压平衡[4]。单个电容的保护电路原理如图2所示。
3.2 无线充电接收模块电路设计
无线充电系统分为发射端和接收端。发射端由比赛组委会提供,接收端根据比赛要求自制,本系统利用股纱包线制成空心线圈,放置在车模底盘。
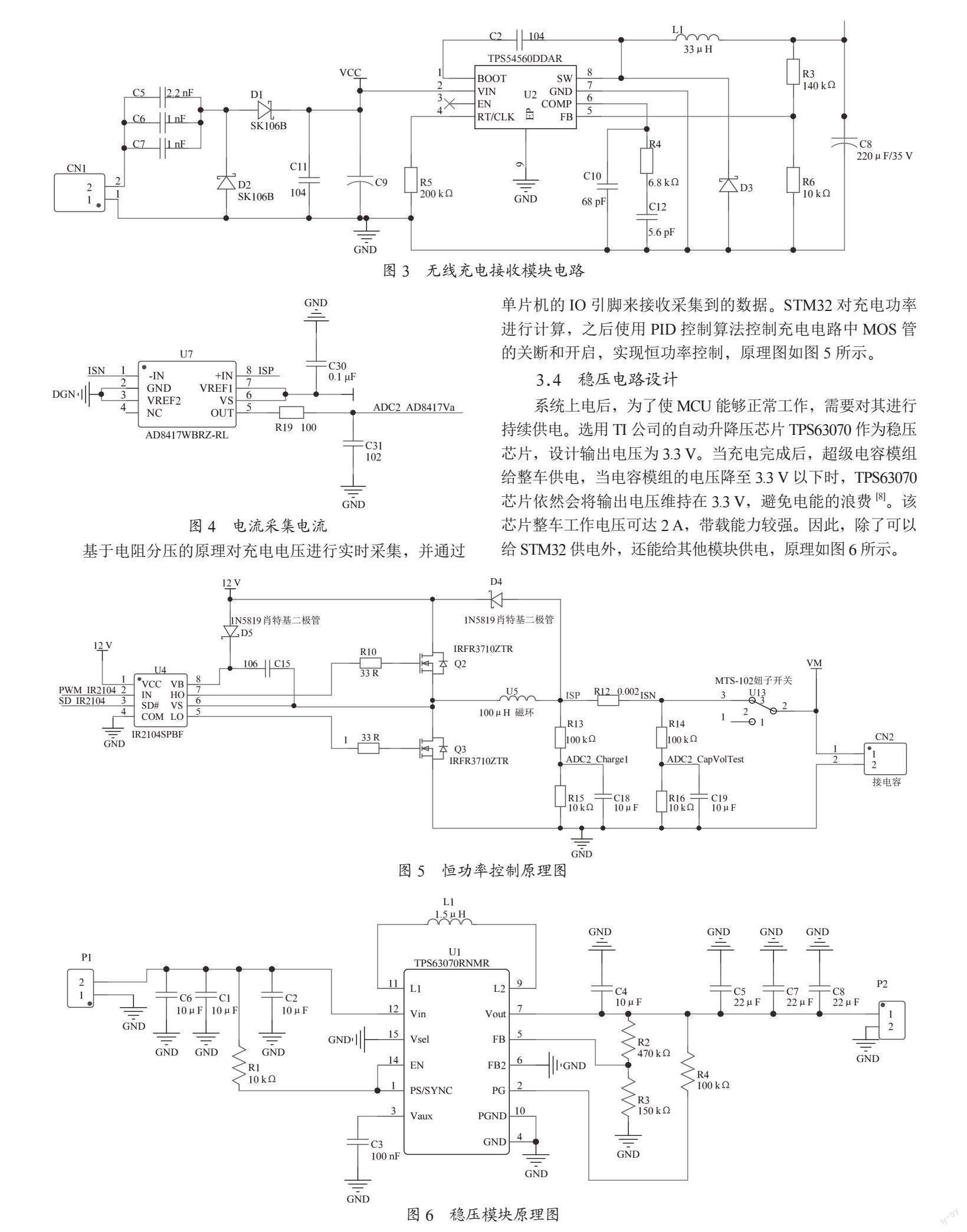
接收线圈本身呈感性,可与后面的NP0高频谐振电容C4、C5、C6匹配成特定频率的谐振回路。谐振回路产生的交流电通过倍压整流电路进行整流[5]。经过实际测量,整流后的直流电压最高可达50 V,远超超级电容组所能承受的13.5 V。因此,若直接使用该电压给超级电容组充电,势必会永久损坏超级电容[6]。为降低充电电压,我们选择在整流电路后面增加DCDC芯片TPS54560进行稳压。接收模块电路如图3所示。
3.3 充电系统控制电路设计
该系统在实际应用中,由于采用恒功率进行控制,需要对充电电流和电压进行实时采集。本系统采用AD8417对充电电流进行实时采集[7],如图4所示。
基于电阻分压的原理对充电电压进行实时采集,并通过单片机的IO引脚来接收采集到的数据。STM32对充电功率进行计算,之后使用PID控制算法控制充电电路中MOS管的关断和开启,实现恒功率控制,原理图如图5所示。
3.4 稳压电路设计
系统上电后,为了使MCU能够正常工作,需要对其进行持续供电。选用TI公司的自动升降压芯片TPS63070作为稳压芯片,设计输出电压为3.3 V。當充电完成后,超级电容模组给整车供电,当电容模组的电压降至3.3 V以下时,TPS63070芯片依然会将输出电压维持在3.3 V,避免电能的浪费[8]。该芯片整车工作电压可达2 A,带载能力较强。因此,除了可以给STM32供电外,还能给其他模块供电,原理如图6所示。
4 软件程序设计
4.1 程序总体设计
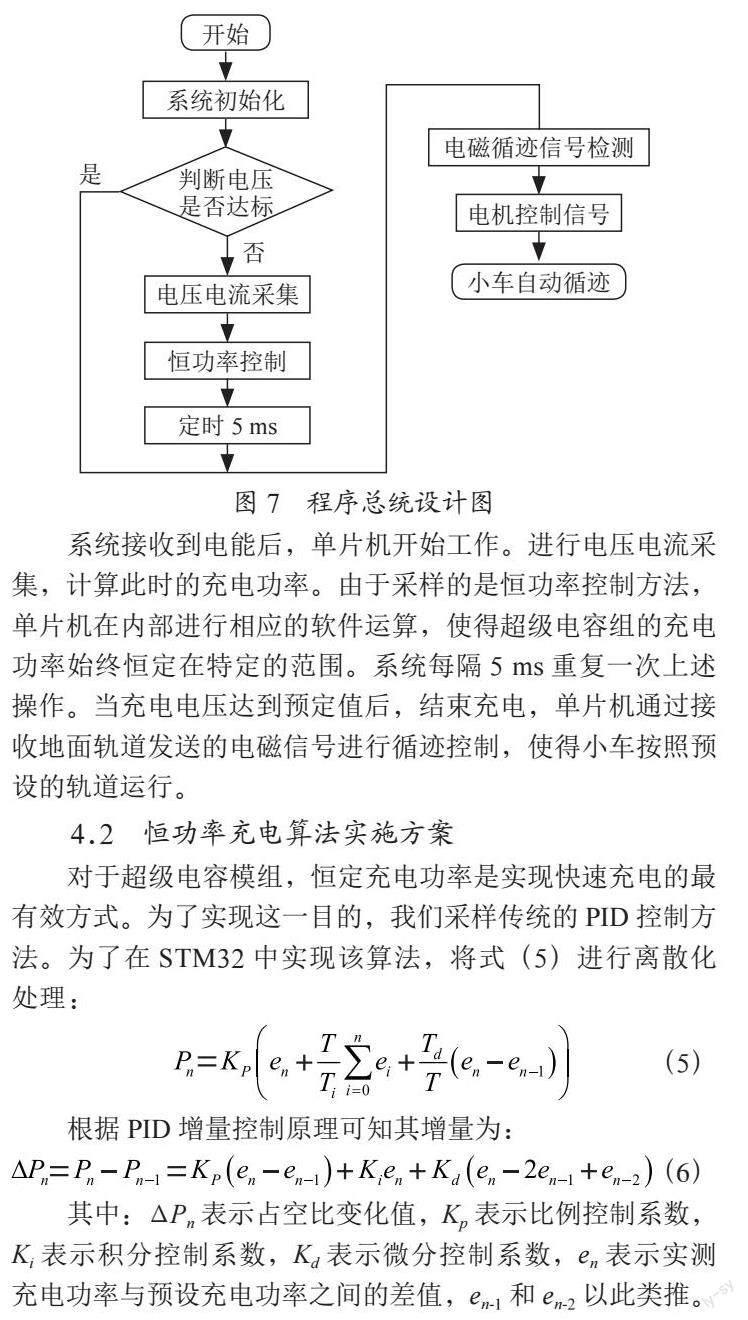
软件部分主要由主函数和定时中断函数组成。主函数负责完成MCU的IO初始化、定时器初始化等工作。定时中断函数是软件的主要执行部分,实现定时控制、电压电流检测、恒功率算法控制、电机控制、循迹信号采集等功能,具体流程如图7所示。
系统接收到电能后,单片机开始工作。进行电压电流采集,计算此时的充电功率。由于采样的是恒功率控制方法,单片机在内部进行相应的软件运算,使得超级电容组的充电功率始终恒定在特定的范围。系统每隔5 ms重复一次上述操作。当充电电压达到预定值后,结束充电,单片机通过接收地面轨道发送的电磁信号进行循迹控制,使得小车按照预设的轨道运行。
4.2 恒功率充电算法实施方案
对于超级电容模组,恒定充电功率是实现快速充电的最有效方式。为了实现这一目的,我们采样传统的PID控制方法。为了在STM32中实现该算法,将式(5)进行离散化处理:
其中:ΔPn表示占空比变化值,Kp表示比例控制系数,Ki表示积分控制系数,Kd表示微分控制系数,en表示实测充电功率与预设充电功率之间的差值,en-1和en-2以此类推。
4.3 实际充电性能测试
为了验证恒功率充电的有效性,将恒功率充电组和恒压充电组进行对照实验。实验过程如下:先利用水泥电阻给超级电容放电,直至其两端电压值为0。然后将无线接收线圈放置在接收线圈内进行充电。充电的瞬间进行计时操作,记录其每次从0 V充电至10 V所用的时间。实验结果如表1所示。
5 结 论
本文以江苏省大学生机器人竞赛为背景,介绍了一种无线恒功率充电智能循迹小车的系统设计方案。首先分析了超级电容的充电理论,给出其充电电压和充电时间以及充电功率之间的关系,然后分析了PID控制器的基本工作原理。在此基础上,文章给出了谐振接收电路、整流电路,以及DC/DC稳压电路的设计原理图。由于该系统使用嵌入式芯片作为主控芯片,因此文章对系统的软件控制流程做出详细的阐述,并详细介绍了恒功率控制算法的软件实现方法。最后,文章通过实验验证了恒功率充电的优越性。
参考文献:
[1] 蔡国营,王亚军,谢晶,等.超级电容储能特性研究 [J].电源世界,2009,1(2):33-37.
[2] 王贤泉,郑中华.超级电容充放电特性研究 [J].船电技术,2011,31(4):55-57.
[3] 贺文海,焦可辉.基于模糊 PID 的掘进机恒功率控制系统设计 [J].煤炭工程,2019,51(9):178-181.
[4] 李赟,朱发旺.基于感应充电的电动车充电系统设计 [J].电源技术,2017,41(9):1364-1365+1376.
[5] 胡林林,景凯凯,袁顺刚.一种巡检机器人无线充电发射端系统设计 [J].电子元器件与信息技术,2020,4(37):139-140.
[6] 朱淦,范澜珊.电动小车动态无线充电系统研究 [J].南方农机,2019,50(22):37-38.
[7] 金昭,夏国华,王澜.基于无线充电的无人机充电平台研究 [J].河南科技,2019(31):11-13.
[8] 許众.基于飞思卡尔智能车的电磁导航控制技术研究 [D].沈阳:沈阳理工大学,2014.
作者简介:何鑫鑫(1990—),男,汉族,江苏泰兴人,助理讲师,硕士研究生,研究方向:控制科学与工程。
猜你喜欢
神州·中旬刊(2018年4期)2018-04-26 13:07:46
科技视界(2017年8期)2017-07-31 20:05:25
电子技术与软件工程(2017年10期)2017-06-02 16:37:24
科技资讯(2016年33期)2017-03-31 19:28:32
电子技术与软件工程(2017年3期)2017-03-22 23:46:38
中国新通信(2017年3期)2017-03-11 09:42:17
科技资讯(2015年33期)2016-05-12 21:45:31
无线互联科技(2016年3期)2016-03-25 03:17:01
电子产品世界(2016年1期)2016-03-07 02:03:48
电脑知识与技术(2015年10期)2015-05-29 13:31:31
