基于机器视觉的易拉罐喷码快速检测
2023-06-22 17:30:09陈玉王慧芳黄玉兰李娟
现代信息科技 2023年5期
陈玉 王慧芳 黄玉兰 李娟
摘 要:文章针对易拉罐罐底喷码检测的要求,设计一套针对易拉罐喷码的特征识别算法,实现了对易拉罐喷码不合格产品的自动检测与快速剔除。算法的主要流程为:对图像进行预处理;确定目标图像的位置,也就是对图像进行定位;识别出目标图像;对目标图像进行判断操作。大量实验的结果表明,该算法的平均识别速度较高,范围控制在1 s内,准确率为98.52%,符合实际应用场景的需求。
关键词:机器视觉;快速检测;易拉罐喷码
中图分类号:TP391.4 文献标识码:A 文章编号:2096-4706(2023)05-0033-04
Rapid Detection of Can's Spray Code Based on Machine Vision
CHEN Yu, WANG Huifang, HUANG Yulan, LI Juan
(Wuchang Institute of Technology, Wuhan 430065, China)
Abstract: According to the requirements of the inspection of the spray code on the bottom of the can, this paper designs a set of feature recognition algorithm for the spray code on the can, which realizes the automatic inspection and rapid elimination of the unqualified products in the spray code on the can. The main flow of the algorithm is: preprocessing the image; Determine the position of the target image, that is, locate the image; Identify the target image; Judge the target image. The results of a large number of experiments show that the average recognition speed of the algorithm is high, the range is controlled within 1 s, and the accuracy rate is 98.52%, which meets the requirements of practical application scenarios.
Keywords: machine vision; rapid detection; can's spray code
0 引 言
易拉罐產品作为饮食行业的重要组成部分,其保质期的识别对于消费者来说非常重要。目前,大部分易拉罐的保质期是通过在易拉罐底部喷码来实现的。通过易拉罐底部喷码识别,可以知晓该易拉罐产品的生产批次及生产日期等相关信息。不合格的喷码信息不仅影响消费者的判断,而且对于企业的信誉也会有不良影响。同时,在这个假冒伪劣产品横行的时代,对易拉罐喷码的严格把控,能够保证正品易拉罐产品的市场流通性,减少假冒伪劣产品流入消费者手中。目前,市场上存在的易拉罐喷码检测系统不足,且检测系统存在着检测效率低、成本较高等问题。采用非自动化的人工检测方式,虽然也能比较准确地得到识别结果,但是主观性高,且时间成本太高,效率低下。开发自动的喷码检测系统,可以更有效、更经济、更准确地对易拉罐喷码进行识别和剔除,减少不合格的喷码的易拉罐产品流入市场。
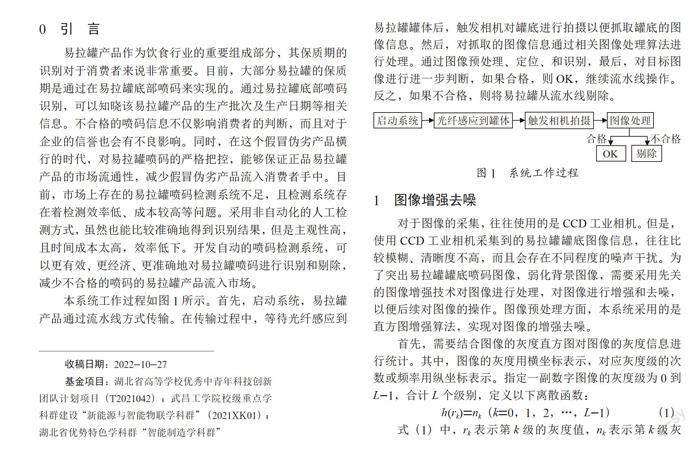
本系统工作过程如图1所示。首先,启动系统,易拉罐产品通过流水线方式传输。在传输过程中,等待光纤感应到易拉罐罐体后,触发相机对罐底进行拍摄以便抓取罐底的图像信息。然后,对抓取的图像信息通过相关图像处理算法进行处理。通过图像预处理、定位、和识别,最后,对目标图像进行进一步判断,如果合格,则OK,继续流水线操作。反之,如果不合格,则将易拉罐从流水线剔除。
1 图像增强去噪
对于图像的采集,往往使用的是CCD工业相机。但是,使用CCD工业相机采集到的易拉罐罐底图像信息,往往比较模糊、清晰度不高,而且会存在不同程度的噪声干扰。为了突出易拉罐罐底喷码图像,弱化背景图像,需要采用先关的图像增强技术对图像进行处理,对图像进行增强和去噪,以便后续对图像的操作。图像预处理方面,本系统采用的是直方图增强算法,实现对图像的增强去噪。
首先,需要结合图像的灰度直方图对图像的灰度信息进行统计。其中,图像的灰度用横坐标表示,对应灰度级的次数或频率用纵坐标表示。指定一副数字图像的灰度级为0到L-1,合计L个级别,定义以下离散函数:
h(rk)=nk(k=0,1,2,…,L-1) (1)
式(1)中,rk表示第k级的灰度值,nk表示第k级灰度值的次数或者频率。
将纵坐标nk除以图像像素的总数目n,即可以得到该图像的归一化直方图。具体公式为:
(2)
直方图均衡化也称为灰度均衡化,它通过改变罐底灰度直方图的形状,使罐底图像的灰度直方图能够均匀分布,从而达到灰度图像增强的目的。一般情况下,原始图像的灰度范围在0和1之间,且是连续的。通过前面的计算,可以得到原始图像的归一化直方图,也称为概率密度函数,具体公式为:
p(x),0≤x≤1 (3)
且
(4)
设直方图均衡化的灰度转换函数为s=f (r)。转换前,图像的概率密度函数为pr (r),转换后,图像的概率密度函数为pr (l )。其中,r表示原图像灰度值,l表示图像均衡化后得到的新的灰度值。
由概率论的知识可以推导出:
pr (s)ds=pr (r)dr (5)
进而可以推导出:
(6)
要使转换后的直方图均匀分布,要求转换后的概率密度函数要满足一定的要求:
pr (s)=1,0≤s≤1
即:
(7)
由式(7)可以得出:
pr (r)dr=ds (8)
两边进行积分运算:
(9)
对于本课题中,罐底喷码图像经过处理后,并不是连续的,而是离散的直方图。对于离散的灰度级,可以近似认为:
(10)
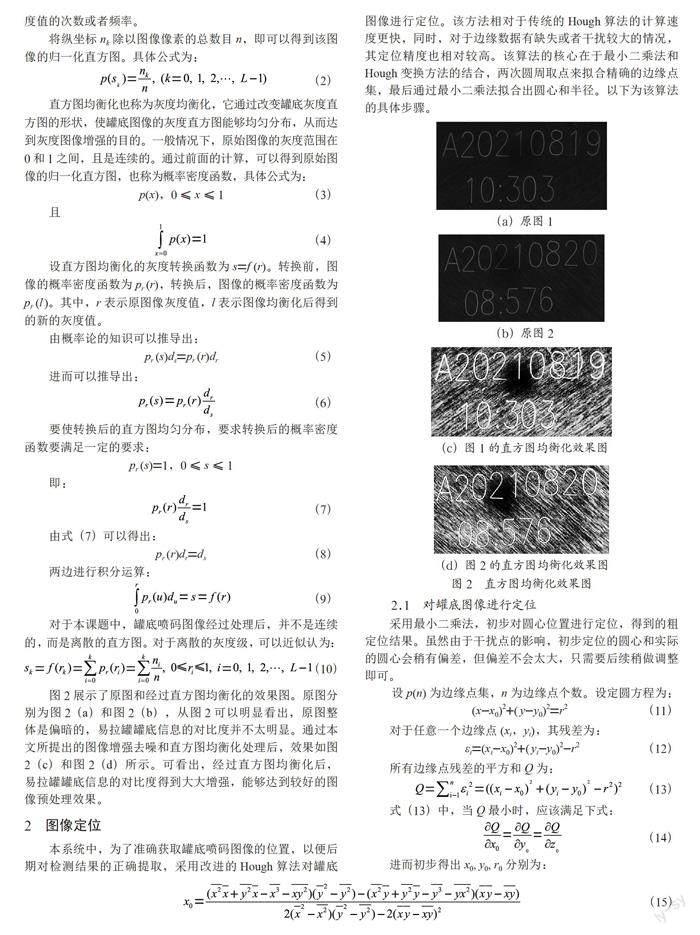
图2展示了原图和经过直方图均衡化的效果图。原图分别为图2(a)和图2(b),从图2可以明显看出,原图整体是偏暗的,易拉罐罐底信息的对比度并不太明显。通过本文所提出的图像增强去噪和直方图均衡化处理后,效果如图2(c)和图2(d)所示。可看出,经过直方图均衡化后,易拉罐罐底信息的对比度得到大大增强,能够达到较好的图像预处理效果。
2 图像定位
本系统中,为了准确获取罐底喷码图像的位置,以便后期对检测结果的正确提取,采用改进的Hough算法对罐底图像进行定位。该方法相对于传统的Hough算法的计算速度更快,同时,对于边缘数据有缺失或者干扰较大的情况,其定位精度也相对较高。该算法的核心在于最小二乘法和Hough变换方法的结合,两次圆周取点来拟合精确的边缘点集,最后通过最小二乘法拟合出圆心和半径。以下为该算法的具体步骤。
2.1 对罐底图像进行定位
采用最小二乘法,初步对圆心位置进行定位,得到的粗定位結果。虽然由于干扰点的影响,初步定位的圆心和实际的圆心会稍有偏差,但偏差不会太大,只需要后续稍做调整即可。
设p(n)为边缘点集,n为边缘点个数。设定圆方程为:(x-x0)2+( y-y0)2=r2 (11)
对于任意一个边缘点(xi,yi),其残差为:
εi=(xi-x0)2+( yi-y0)2-r2 (12)
所有边缘点残差的平方和Q为:
(13)
式(13)中,当Q最小时,应该满足下式:
(14)
进而初步得出x0, y0, r0分别为:
(17)
2.2 两次圆周取点
首先,进行第一轮随机取点,对圆周随机抽取一点,均匀抽样50%,获得简化的目标点集。
设定以粗圆心O(a0,b0,r0)为中心,在其11×11的领域,进行霍夫变换。设(ai,bi)为该邻域内的任意一点,则有:
l=[-11, 11] (18)
设?r=rmax-rmin,那么,hough_space(a,b,r)的变换范围为23×23×?r。
对于抽样的易拉罐罐底图像任何一个边缘(xi,yi)和邻域内的点(ai,bi),可以确定边缘点对应领域内点(ai,bi)的半径ri:
(19)
在相应的Hough空间里进行累加:
hough_space(aj, bj, ri-rmin)=hough_space(aj, bj, ri-rmin)+1(20)
对所有抽样的边缘点以及邻域内的点进行遍历。通过多次重复进行前面的操作,霍夫空间hough_space(23,23,?r)即为所求的完整的霍夫空间。
接着,第二次圆周随机取点,方法同前,以获得边缘点集。对此次取得的边缘点集(xi,yi)和O(a,b,r)中的任何一点O(ak,bk,rk),将满足下式的点纳入霍夫圆hough—circle中,如不满足则作丢弃处理。
(21)
2.3 拟合出圆心
最后,再采用最小二乘法拟合精确边缘点集,得到精确的圆心O1(a0,b0,r0)。
3 图像分割与识别
对易拉罐罐底图像进行分割的准确性,将直接影响到后续能否提取出感兴趣的区域可以并供后续图像处理。本系统采用最大类间方差法,即OSTU阈值分割法,使目标与背景的类间方差最大,从而到达区分易拉罐罐底喷码的背景图像与目标图像的目的。
设图像的灰度级为0到L,共L个级别。灰度值为i的像素个数为ni,则整副图像的总像素个数为:
(22)
灰度值为i的概率为:
(23)
由概率论知识可知:
(24)
选择一个阈值T,将图像分为两个域Q0和Q1,其中,Q0的像素范围[0, T-1],Q1的像素范围为[T, L-1],计算Q0和Q1的概率分别为:
(25)
(26)
再计算Q0和Q1的平均灰度分别为:
(27)
(28)
计算u,u表示在图像没有被分割之前,图像的灰度平均值:
(29)
计算两个区域的总方差为:
σβ2=p0( μ0-μ)2+p1( μ1-μ)2=p0 p1(μ0-μ1)2 (30)
最大类间方差法OSTU的主要目的是提取目标图像区域。经过该算法,虽然提取出了目标区域,但是由于对于字符间距过小或是有些轻微粘连的地方,无法准确得到单个字符的特征信息,还需要对图像进行进一步分割。本系统采用的是改进的垂直投影法。该算法具体步骤如下:
首先,计算所有字符的平均宽度,将其记为Wav。
然后,进行垂直投影,将字符垂直投影之间有明显间隔(有明显波谷)的字符先进行分割。
接着,将分割出的字符宽度与平均字符宽度相除,得到系数θav。当其小于一个阈值Th,即判定当前分割的字符为单个字符。对于大于阈值的情况,即表明有两个或者两个以上的字符存在粘连,则需要对图像再次进行分割。
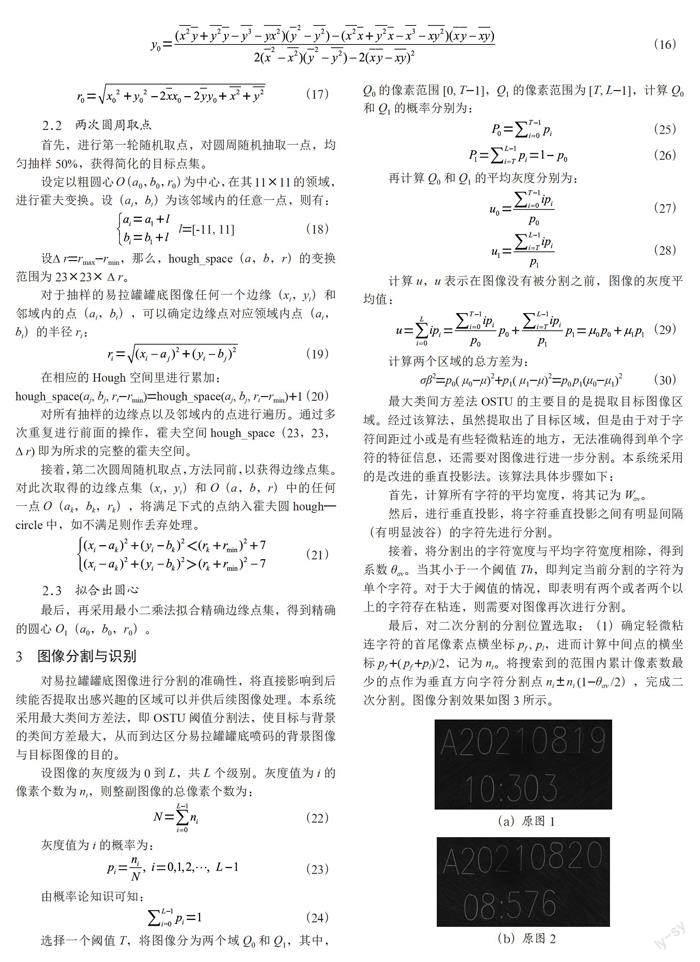
最后,对二次分割的分割位置选取:(1)确定轻微粘连字符的首尾像素点横坐标pf , pl,进而计算中间点的横坐标pf +( pf +pl)/2,记为ni。将搜索到的范围内累计像素数最少的点作为垂直方向字符分割点ni±ni (1-θav /2),完成二次分割。图像分割效果如图3所示。
图3对展示了经过本文图像分割算法后得到的效果图。可以看到,采用本文提出的算法,对分割后的效果图单个字符用不同的颜色标记,每个字符的连续性较好,不同字符之间没有粘连,清晰度较高,能够达到较好的图像分割效果。
4 测试结果
对喷码字符进行识别后,接着对喷码信息进行特征匹配。通过比对真实喷码字符信息,查看其包含的生产日期信息是否正确。检测结果如表1所示。随机抽取880副易拉罐罐底喷码图像进行检测,准确识别的图像数量为867,准确率达到98.52%,平均耗时794毫秒/张。可以看出,采用本文提出的图像处理算法,能够达到较好的检测效果。
5 结 论
本文针对的是易拉罐底部日期喷码识别效率的问题,设计的一种基于机器视觉的易拉罐喷码快速检测系统。系统依据易拉罐底部喷码的特点,对其生产日期的图像信息进行采集并保存。在进行易拉罐底部喷码检测时,首先,对易拉罐罐底喷码字符图像进行图像预處理,本文主要采用的算法为直方图均衡化算法。接着,进行喷码字符区域的定位,期间采用最大类间方差法OSTU对字符区域进行分割处理。在获得喷罐底码字符区域后,本文使用改进的垂直分割法,完成对字符分割,获得单个喷码字符。然后,对获取的字符信息进行特征提取,进行训练分类,实现字符的识别。最后,通过与原始生产信息比对,判断喷码信息是否错误,剔除存在喷印信息缺陷的产品,保留合格产品,以达到易拉罐喷码快速检测的目的。
参考文献:
[1] 宋丽梅,朱新军.机器视觉与机器学习 [M].北京:机械工业出版社,2020.
[2] 刘秀平,景军锋,张凯兵.工业机器视觉技术及应用 [M].西安:西安电子科技大学出版社,2019.
[3] 阮秋琦.数字图像处理学:第4版[M].北京:电子工业出版社,2022.
[4] 赖定敏.基于图像处理的罐装瓶喷码缺陷检测 [D].成都:西华大学,2021.
[5] 刘伟鑫.易拉罐喷码在线智能识别技术研发 [D].广州:广东工业大学,2020.
[6] 胡善强.基于机器视觉的罐盖缺陷检测技术研究 [D].长沙:湖南大学,2018.
[7] 王子民,赵子涵,冯梦婷,等.基于机器视觉的答题卡识别系统设计 [J].南京理工大学学报,2022,46(4):443-450.
[8] 郑如新,孙青云,肖国栋.基于机器视觉的金银花图像识别处理算法研究 [J].中国农机化学报,2022,43(4):153-159.
[9] 谢永杰,智贺宁.基于机器视觉的图像识别技术研究综述 [J].科学技术创新,2018(7):74-75.
[10] 王灿,张红霞,刘鑫,等.机器视觉系统的自动对焦技术研究 [J].计算机测量与控制,2019,27(3):150-154.
[11] 周阳,沈婷婷,席志远,等.基于Halcon的日化瓶瓶底喷码质量检测算法研究 [J].仪表技术与传感器,2020(11):101-104+110.
[12] BELUSSI L,HIRATA N. Fast QR Code Detection in Arbitrarily Acquired Images [C]//2011 24th SIBGRAPI Conference on Graphics,Patterns and Images.Alagoas:IEEE,2011:281-288.
[13] JORDAN M I,MITCHELL T M. Machine Learning:Trends,Perspectives,And Prospects [J].Science,2015,349(6245):255-260.
作者简介:陈玉(1987—),女,苗族,湖南怀化人,讲师,硕士研究生,研究方向:图像处理、机器视觉;王慧芳(1992—),女,汉族,安徽安庆人,工程师,硕士,研究方向:软件工程;黄玉兰(1984—),女,汉族,湖北武汉人,副教授,硕士研究生,研究方向:图像处理;李娟(1977—),女,汉族,江苏南京人,教授,博士研究生,研究方向:图像处理、物联网技术。
收稿日期:2022-10-27
基金项目:湖北省高等学校优秀中青年科技创新团队计划项目(T2021042);武昌工学院校级重点学科群建设“新能源与智能物联学科群”(2021XK01);湖北省优势特色学科群“智能制造学科群”
猜你喜欢
电脑知识与技术(2016年28期)2016-12-21 12:13:14
科技视界(2016年26期)2016-12-17 17:31:58
湖北农业科学(2016年18期)2016-12-08 18:43:57
科教导刊(2016年25期)2016-11-15 17:53:37
软件工程(2016年8期)2016-10-25 15:55:22
科技视界(2016年20期)2016-09-29 11:11:40
企业导报(2016年10期)2016-06-04 11:37:43
中国实用医药(2016年9期)2016-05-17 10:59:06
中国科技博览(2016年14期)2016-04-25 10:05:17
中国科技博览(2016年8期)2016-04-25 06:23:44