无人机可见光遥感木麻黄人工林株数提取方法比较研究
2023-06-20 12:27:30赵各进孙梦莲宋贤芬郝振帮李明慧武红梅刘健余坤勇
西南林业大学学报 2023年3期
赵各进孙梦莲宋贤芬郝振帮李明慧武红梅刘 健余坤勇
(1. 福建农林大学林学院,福建 福州 350002;2. 3S 技术与资源优化利用福建省高校重点实验室,福建 福州 350002)
滨海地区社会、经济发展离不开环境支持与保障,滨海地区特殊的气候和土壤条件导致滨海防护林生态系统十分脆弱。木麻黄人工林作为滨海主要防护林,具有重要的生态功能[1-3]。林分株数是林分密度的重要指标,能够表征林分现状,快速、实时、准确地获取林分株数利于及时监测木麻黄人工防护林的健康状况,同时,为科学管理森林资源提供便利[4]。传统每木检尺的调查方法结果虽然相对准确,但需要消耗大量的人力物力,且只能获得点上的数据,难以满足精准、快速获取区域或更大尺度的林业调查需求[5]。近年来,随着无人机科学、传感器、计算机视觉的并行发展,促进了无人机低空遥感在林业资源的监测应用[6-8]。机载LiDAR 对冠层具有较强的穿透性,可以探测到林下地表信息,机载LiDAR 点云数据经滤波、插值等处理可生成高精度DEM[9-10],从而可以极大地提高森林参数的提取精度。但由于机载LiDAR 设备非常昂贵,数据处理过程复杂,限制了机载LiDAR 在基层林业系统的推广和应用[11]。相比较之下,无人机可见光遥感数据处理简单、获取成本低廉,成为了当下研究的热点[12]。
单木是森林的基本单元,林分株数提取的关键在于单木识别。目前,利用可见光遥感数据作为数据源识别单木的方法大致分为2 类:一是直接基于数字正射影像或其增强影像识别单木,主要方法包括:多尺度分割法[13-15]、分水岭算法[16-18]、边缘检测[19]、光谱局部最大值法[20]等;二是基于运动恢复结构(SfM)算法构建可见光影像匹配点云,将其转化为具有高度信息的栅格表面模型(DSM/CHM),在此基础上识别单木,主要方法包括:局部最大值法、局部最小值法[21-23]。其中,多尺度分割法、局部最大值法这两种方法在单木识别中应用较为广泛。冯静静等[24]运用改进的数学形态学图像增强技术处理数字正射影像,基于生成的灰度梯度图像进行面向对象多尺度分割,单木分割精度为83.19%;张仓皓等[14]基于无人机不同飞行高度获取的可见光正射影像,运用面向对象多尺度分割方法,实现了不同飞行高度的毛竹立竹度提取。郭伟等[25]以大兴安岭无人机可见光遥感数据为基础,采用局部阈值法去除背景干扰,结合局部最大值法获取了森林株数;刘江俊等[26]基于无人机可见光相片衍生的CHM,使用局部最大值法识别树冠顶点,F1_score 为0.77;Hao 等[21]以杉木人工林为实验标准地,基于无人机可见光影像生成的CHM 进行单木识别,整体F1_score 达0.99。
基于无人机可见光遥感的林分株数提取研究大多只探讨了某一种方法的提取精度,并未在同一研究区对多种经典方法的准确性、适用性对比研究。鉴于此,选取平潭岛一块木麻黄人工林为研究区域,分别设置3 块典型的幼龄林、成熟林标准地,以无人机可见光遥感为数据来源,使用基于冠层高度模型的局部最大值方法(LMC)、基于正射影像的局部最大值方法(LMD)、基于正射影像的多尺度分割方法(MST)提取幼龄林和成熟林的标准地株数,对3 种方法提取的株数和实测数据进行对比分析,旨在探索基于无人机可见光遥感快速精确地提取木麻黄人工林林分株数方法的适用性。同时,为无人机可见光遥感技术监测森林资源状况、辅助资源调查,以及无人机可见光遥感的滨海防护林株数的快速提取等方面提供技术和方法支撑。
1 研究区概况
研究区位于福建省福州平潭境内(25°15′~25°45′N, 119°32′~120°10′E)。平潭岛上地形多以丘陵、平原为主;属南亚热带海洋季风性气候,冬暖夏凉,湿润温和,降雨时节分明;年平均气温19.5 ℃,年平均降水量900~1 200 mm,年平均风速9 m/s,是福建省的强风区之一。岛上森林类型主要分为阔叶林、针叶林和针阔混交林。其中,常绿乔木主要有木麻黄(Casuarina equisetifolia)、台湾相思(Acacia confusa)、黑松(Pinus thunbergia)等,植被结构较为单一,优势树种明显,同时分布着海滨藜(Atriplex maximowicziana)、秋茄树(Kandelia obovata)等滨海地区特有植物。研究区内的常绿乔木为木麻黄纯林,分别设置3 块30 m × 30 m 的幼龄林标准地和成熟林标准地,见图1。
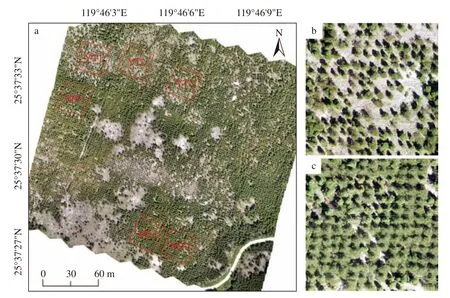
图 1 研究区地理位置及标准地分布Fig. 1 Location and sample distribution of the study area
2 材料与方法
2.1 数据来源与预处理
2.1.1 无人机影像数据的获取及预处理
2021 年9 月8 日,采用搭载Mica Sense Red Edge 多光谱镜头(蓝光、绿光、红光、红边、近红外)和普通可见光镜头的大疆精灵 4 无人机系统,于正午获取研究区影像。无人机定位系统由GPS + BeiDou 组成,其中多频多系统高精度RTK GNSS 使用的频点为GPS:L1/L2;BeiDou:B1/B2,首次定位时间小于50 s,垂直定位精度为1.5 cm +1 ppm(RMS);水平定位精度为1 cm + 1 ppm(RMS);地面采样距离 (H/18.9) cm/pixel,H为飞行器相对于起飞点的飞行高度(单位:m);照片最大分辨率为:1 600 × 1 300(4∶3.25);云台可转动范围为俯仰-90°~30°。本研究飞行参数设置为航线高度为80 m,航向重叠率和旁向重叠率分别为85%和75%,等时间间隔拍摄,拍摄间隔为2 s。
采用大疆智图(DJI Terra)软件对无人机可见光相片进行校正、拼接等预处理,获得无人机可见光正射影像(DOM)、数字表面模型(DSM)及点云数据,对点云数据进行分类,插值等处理生成数字地形模型(DEM),将DSM 与DEM 作差生成冠层高度模型(CHM),其中DOM 影像的分辨率为0.03 m,CHM 影像分辨率为0.06 m。
2.1.2 地面实测数据的获取及单木位置确定
本研究共设置了6 块标准地,幼龄林1、2、3 号标准地实测株数分别为182、175、170 株,共计527 株;成熟林1、2、3 号标准地实测株数分别为212、207、190 株,共计609 株。以正射影像为参考底图,标准地西南角的顶点作为坐标原点构建平面坐标系,确定标准地内的单木的相对位置。使用RTK 对标准地的4 个顶点和个别单木进行定位,实现标准地木麻黄的实地位置与遥感影像的精准对应。
2.2 单木提取方法
2.2.1 基于CHM影像的局部最大值滤波方法(LMC)
冠层高度模型(CHM)可以表达林分中每棵树的冠层到地面的相对垂直距离[27]。木麻黄树冠具有中心比四周高的特点,代表树冠中心有更高的像元值,局部最大值法即通过固定窗口寻找CHM 中局部最高点来确定树冠中心。前人研究表明,平滑窗口和固定窗口的大小是局部最大值检测树冠的关键,不同窗口组合会影响识别效果[21]。
为了突出局部最大值算法的最佳株数提取性能,本研究将3 种(0.1、0.2、0.3 m)平滑窗口和4 种(0.5、0.6、0.7、0.8 m)固定窗口相组合,共计12 个窗口组合,分别选择1 块幼林标准地和成熟林标准地进行测试,选择精度最高的窗口组合对其他标准地进行株数提取。
2.2.2 基于DOM 影像的局部最大值滤波法(LMD)
在林分中,单木树尖部分属于新生部位且接收更多的光能,从而具有较高的光谱反射率[28],正射影像的G 通道影像对绿色植物较为敏感,使用局部最大值滤波算法探测影像中冠状最大值即单木树冠最高值,从而实现单木识别。此外滨海地区土壤贫瘠,林下植被较少,木麻黄人工林裸地占比较高,而裸地的像素值高于植被,直接使用G 通道影像进行局部最大值方法提取树顶点效果较差,本研究使用过绿指数(EXG)[29]对G 通道进行增强处理,能够有效提高树顶点的获取精度。公式如下:
式中:R、G、B分别代表DOM 影像的红、绿、蓝3 个通道的像素值。
由于此方法也是基于局部最大值算法提取株数,故以LMC 方法获得的最佳窗口组合作为本方法的最优参数,提取6 块标准地的株数。
2.2.3 基于DOM 影像的多尺度分割法(MST)
多尺度分割是一种自下而上的分割方法,通过合并相邻的像素或小的分割对象,在保证不同对象之间平均异质性最小、对象内部像元之间同质性最大的前提下,基于区域合并技术实现影像分割[30]。采用eCognitionDeveloper 8.9 软件对6 块木麻黄标准地进行多尺度分割处理,提取树冠,实现木麻黄人工林株数提取。
为了最大化突出本方法的株数提取性能,分别选取高、低密度林分的1 块标准地来确定最佳分割尺度。使用ESP 工具来确定最佳分割尺度。在eCognition 软件中加载ESP 插件,选择Estimation of Scale Parameter 2 (ESP 2)算法,设置一系列的初始参数进行迭代,处理结果将输出1 个*txt 文档,将文档加载在ESP 后处理软件ESP_Estimation_Scale_Parameter_Chart.exe 中,经过计算将会生成最优分割尺度折线图(图2)。其中横坐标表示分割尺度(Scale),纵坐标分别表示影像对象的局部方差(LV)和局部方差变化率(ROC)。当局部方差变化率(ROC)呈现波峰状态时,表明此点的分割尺度为较优分割尺度,选择起伏程度较大的波峰点作为备选分割尺度。成熟林的备选分割尺度为28、33、38、40、47、57、61、73、80、91、97、113,幼龄林的备选分割尺度为27、33、46、50、54、59、68、87、95、108。在eCognition 软件中创建多尺度分割进程,形状参数和紧致度参数都设计设置为0.5,然后改变分割尺度比较分割结果,经比较,高、低密度林分最优分割尺度分别为61、46。
对最优分割结果进行分类,筛选出木麻黄树冠多边形,树冠多边形的中心即为木麻黄树冠中心。
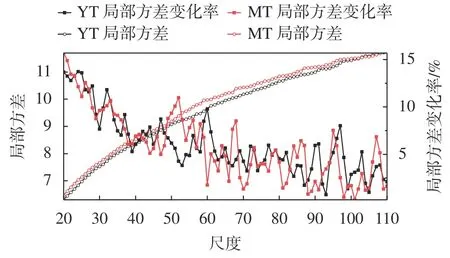
图 2 ESP 最佳分割尺度折线图Fig. 2 The optimal segmentation scale line by estimation of scale parameter(ESP)
2.3 单木提取精度评价指标
以实地调查单木位置点为中心,建立1 个半径为0.8 m 的圆形缓冲区,当识别到的潜在单木点位于缓冲区内有且只有1 株,定义为正确识别;当识别到的潜在单木点位于缓冲区内有且大于1 株时,将距离缓冲区中心最近的1 株定义为正确识别,其他定义为错误识别;当识别到的潜在单木点位于缓冲区外,定义为错误识别(图3)。
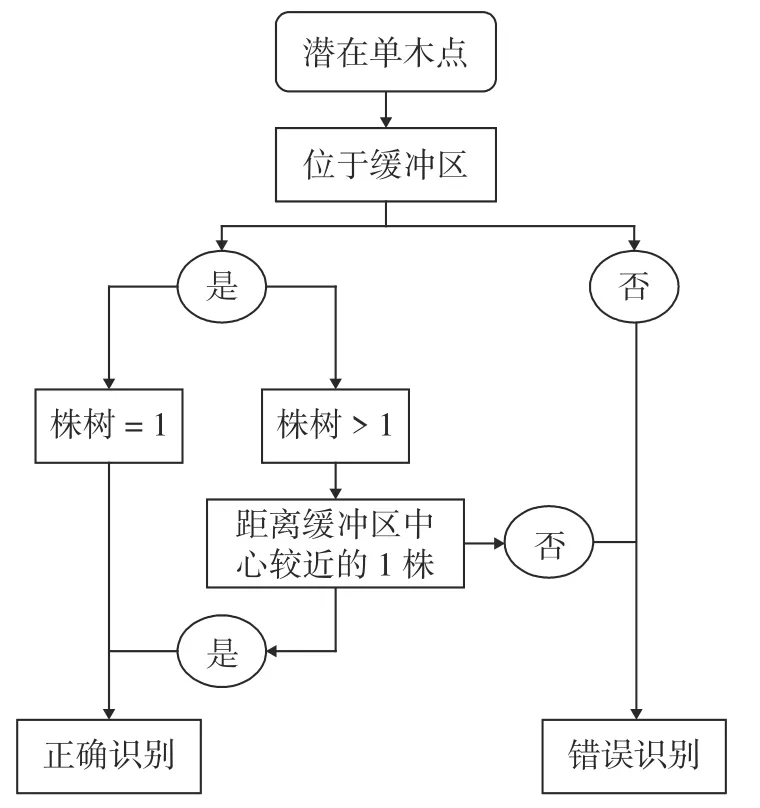
图 3 单木识别结果判断流程图Fig. 3 Flow of individual tree detection
使用准确率(P)、召回率(RE)、F 测度(Fscore)[31-32]3 个评价指标比较3 种方法识别精度。其中,P表示不同方法自动提取的单木株数中正确的株数占比,RE 表示正确提取单木株数占标准地内实际单木株数的比值,Fscore同时考虑准确率和召回率,是衡量单木提取的方法的综合指标。
式中:TP 表示正确识别的株数,FP 表示错误识别的株数,FN 表示遗漏的株数。
3 结果与分析
3.1 最佳参数的确定
3.1.1 局部最大值算法最佳窗口组合的确定
窗口组合识别结果见表1。

表 1 不同窗口组合单木识别结果对比Table 1 Comparison of individual tree detection with different combinations of window size
经分析,在幼龄林或成熟林中,较小的平滑窗口和较小的固定窗口相组合均能获得较高的RE 值。当窗口组合为0.1~0.5 m 的组合时,低、成熟林的RE 值都达到最高,分别为0.97、0.98。随着平滑窗口和局部最大值窗口的增大,RE值呈现降低趋势。其中,成熟林的RE值在窗口组合为0.2~0.7 m 趋于稳定。P值则与RE值的情况相反,随着窗口的增大而升高。当窗口组合为0.2~0.8 m 时,幼龄林的P值最大,达到了0.98;窗口组合为0.3~0.7 m 和0.3~0.8 m 时,成熟林的P值都为1。研究表明,当平滑窗口和固定窗口较小时,遗漏株数较少,但误判株数较多;当平滑窗口和局部最大值窗口较大时呈现与之相反的结果。Fscore同时考虑了遗漏株数和误判株数,将RE 值和P值的结果进行调和,进而全面评价识别结果。
经过对比发现,窗口组合为0.3~0.5 m 时,幼龄林的遗漏株数和误判株数都相对较低,Fscore最高;窗口组合为0.2~0.6 m 时,成熟林的遗漏株数和误判株数都相对较低,Fscore最高。因此,幼龄林最佳窗口组合为0.3~0.5 m;成熟林最佳窗口组合为0.2~0.6 m。
3.1.2 面向对象的多尺度分割法最佳分割尺度的确定
为了获得最佳的多尺度分割效果,将形状参数(0.1~0.9)和紧致度参数(0.1~0.9)进行组合,得到共计81 组分割结果,对比分割效果,确定成熟林林分的形状参数和紧致度参数都为0.8 时,单木分割效果最佳。使用相同方法,设置形状参数和紧致度参数分别为0.8 和0.7 时,幼龄林分割效果最佳。
3.2 LMC、LMD、MST 最佳尺度下的识别结果对比单木提取结果
运用基于CHM 的局部最大值法(LMC)、基于DOM 的局部最大值法(LMD)、基于DOM 的多尺度分割法(MST)3 种方法分别在2 种林龄中识别单木。3 种方法最佳结果见表2 和图4,标准地总体Fscore从高到低为LMC、LMD、MST,分别为0.97、0.90、0.78。

表 2 不同方法单木识别精度对比Table 2 Accuracy comparison of individual tree detection with different methods
LMC 方法在幼龄林和成熟林的RE、P、Fscore都相近,Fscore皆为0.97,说明LMC 方法能较全面地识别幼龄林和成熟林中的单木,具有很好的稳定性和适用性;LMD 方法在不同林龄间的RE 值比较稳定(0.97、0.94),且与LMC 方法的RE 值(0.96、0.97)也相近,而该方法对幼龄的误判株数较多,导致幼龄林的P值比成熟林低0.9;MST 方法在幼龄林、成熟林的Fscore分别为0.76、0.81,精度相近且明显低于上述两种方法。

图 4 方法对比及标准地结果展示Fig. 4 Method comparison and sample plot results
4 结论与讨论
4.1 讨论
本研究以福建省平潭岛沿海防护林为研究区,设置了2 种林龄实验标准地,对基于冠层高度模型的局部最大值方法(LMC)、基于正射影像的局部最大值方法(LMD)、基于正射影像的多尺度分割方法(MST)木麻黄人工林株数提取结果进行对比分析,发现3 种方法的单木识别的精度存在较大差异。对LMD 方法进行精度评价后发现,相较于成熟林,幼龄林的P值降低了0.1,表明该方法对幼龄林的错误识别株数较多,错误识别是影响该方法的单木识别精度的主要因素。LMD 方法对幼龄林的单木识别精度较差,是因为幼龄林郁闭度较低,地表附着着一些其他植被,其像素值与木麻黄冠层像素值相近[25],存在同谱异物的现象,使用像素阈值删除非树冠点会导致误删树冠点或漏删非树冠点。对MST 方法进行精度评价后发现,其整体精度远低于LMC 和LMD,原因是其步骤更加繁琐,需要先获得树冠轮廓,再将树冠轮廓转换为树冠中心点,分割效果受分割尺度、光谱异质性、形状异质性等诸多因素影响[33]。不同林龄识别精度也呈现了差异,幼龄林的P值更低,说明其错误识别率较高,原因是虽然幼龄林具有更低的郁闭度,但其分布并不均匀,标准地同时出现了聚集和分散两种分布情况,增加了分割参数选取的难度;其次,较低的郁闭度增加了地面植被以及阴影的影响。对LMC 方法进行精度评价后发现,其在不同林龄中的精度相近且较高,原因在于相较于LMD,其使用高度阈值删除非树冠点克服了阴影和地面植被的影响。
由于LMC 方法通过设置高度阈值筛除掉了非树冠点,去除了地面误判点的干扰,最终单木检测结果中的误判点全部来源于树冠。本研究试验了平滑窗口和局部最大值探测窗口的不同组合对局部最大值方法的单木识别效果,发现平滑窗口和局部最大值固定窗口的大小对单木识别结果具有影响。保持平滑窗口不变,发现幼林和成熟林具有相同规律,即随着局部最大值探测窗口和平滑窗口的增大,RE 值呈现降低趋势,P值呈现升高趋势。研究表明较小的固定窗口可以获得更高的单木检测率,但是存在较高的误判率。当树冠尺寸较大或者冠形较复杂时,偏小的固定窗口导致重复检测同一棵树;偏大的固定窗口则会过滤掉较小的树冠,从而导致单木漏检。因此,不同林龄的木麻黄林分需要设置不同的窗口进行单木株数的提取。
4.2 结论
本研究以典型沿海防护林树种木麻黄为研究对象,基于无人机可见光遥感数据,选取了6 个标准地(2 种林龄类型,共1 136 株),结合地面实测数据,通过计算召回率(RE)、准确率(P)和Fscore,比较3 种方法(LMC、LMD 、MST)的株数提取精度。结果表明:3 种方法中LMC 总体株数提取精度较高,Fscore达0.97,MST 总体株数提取精度最差,Fscore仅为0.78;LMC 方法对不同林龄木麻黄人工林的株数提取精度相近,而LMD、MST 在成熟林的株树提取精度高于幼龄林;经综合分析,3 种方法中,LMC 总体株数提取精度最高,且适用于不同林龄的木麻黄人工林株数提取,可以满足实时、快速提取木麻黄人工林株数的需求。
猜你喜欢
农业工程学报(2022年14期)2022-10-19 02:24:48
江西农业大学学报(2022年1期)2022-02-04 11:51:42
地理空间信息(2021年10期)2021-11-14 10:01:12
江西农业大学学报(2021年2期)2021-05-16 02:18:24
遥感信息(2019年1期)2019-03-22 01:38:16
农业与技术(2018年16期)2018-11-28 11:24:08
森林工程(2018年5期)2018-05-14 13:54:30
现代农业科技(2017年10期)2017-07-12 14:14:49
防护林科技(2016年5期)2016-09-05 01:19:50
中国农业信息(2016年17期)2016-02-06 09:50:05