适应智能物流机器人传输系统应用的医院建筑空间形态探讨
2023-06-16 10:56佘妤琳张春阳华南理工大学建筑学院广东广州510641
物流科技 2023年6期
佘妤琳,张春阳 (华南理工大学 建筑学院,广东 广州 510641)
1 智慧物流传输是医院发展的需求
随着我国经济的发展,人民群众对医疗服务的需求和品质要求不断提高,医院建筑的建设水平也不断提升。为了满足当下医院日益增长的成本控制需求和效率提高需求,使用人工智能、大数据等技术的智能物流传输系统进行物资传输的精细管理逐渐成为现阶段医院物流解决方案的大势所趋,目前国内已经有相当规模的医院应用了不同类型的医院智能物流系统。
医院智能物流系统目前可大致分为气动式物流传输系统、轨道小车物流传输系统、箱式物流传输系统和智能物流机器人传输系统四种[1]。相对于其他智能物流子系统,智能物流机器人传输系统的优点主要在于载重大和适用建筑阶段广两个方面:一方面,智能物流机器人原则上可以运送所有物品,多用于运送重量相对较重、体积相对较大的物品,如批量的检验标本、药品、供应室物品以及医疗器械、被服等;另一方面,其施工难度小且布置灵活,可以应用于已建成楼、改造楼及新建楼,适用范围广。
2 医院智能物流机器人传输系统概述
2.1 系统简介
医院智能物流机器人传输系统是以医院智能物流机器人为主要载体的智能物流系统;智能物流机器人能够自主规划路径,能独立编制操作计划,依据实际情况确定动作程序,执行医院内物资的配送、搬运等工作。目前,市面上所应用的医院智能机器人传输系统,是根据机器人的运动导引方式和智能程度分类的,主要分为AMR ( Automated Mobile Robot)智能移动机器人系统和AGV (Automated Guided Vehicle)自动导引运输车系统两种[2]。其系统主要由三部分组成:机器人配送机体、硬件配套设施和软件系统。
2.2 应用现状
随着我国医疗建设的高速发展,医院智能物流传输系统也得到迅猛发展。自2015年始,国内部分医院开始采用智能物流机器人传输系统,前期受到技术成熟度和价格的影响,没有得到大规模应用。但是随着技术的快速发展和产品的优化迭代,到2020年智能物流机器人系统的技术已经趋于成熟,成本得到了控制,并且积累了足够的实际应用经验,相比于其他智能物流传输系统具有更好的灵活性和智能性,医院智能物流机器人传输系统正在稳步发展、抢占医院物流市场。
随着近几年相关技术的快速发展,医院智能物流机器人传输系统的应用出现了应用场景扩大化和复杂化、管理过程精细化、院感防控严格化等趋势。这种应用趋势的变化不仅说明了智能物流机器人技术的进步,还说明了机器人物流有市场和使用的需求。而更多的需求被释放,智能物流机器人传输系统的潜力将得以发挥,设备研发厂商的技术要求也会相应提高,智能物流机器人传输系统的发展前景宽广。
2.3 研究现状
在关于各类医院智能物流系统的应用和研究中,对气动式、轨道式、箱式等系统的研究较早且成果较多,而智能物流机器人传输系统的技术开发则时间较短,实践案例较少,相关研究还不够充足。医院建筑楼宇作为工作场景和环境依托,直接决定了能否应用智能物流机器人系统及其运行效率。为了更好地指导智能物流机器人的应用,提高运行效率,降低建设成本和运维成本,研究使用智能物流机器人传输系统的医院建筑设计形式是必要的。
3 适宜智能物流机器人传输系统应用的医院建筑总体布局
当智能物流机器人在院内不同部门间运输物资时,与其工作效率关系最密切的建筑因素就是医院的总体布局。
对于已建成的医院建筑来说,改变原有的建筑总体布局的性价比和可行性较低,在实际中通常只能调整物流系统设计、适度改造或增设优化原有建筑总体布局。在原有条件适宜的情况下,建筑改造需求较低。而对于新建的医院建筑来说,则可在建筑设计阶段就预先选用适宜智能物流机器人传输系统采用的建筑总体布局,建设符合需求的建筑空间,从而提升其运行效果。
下面阐述几种较适宜智能物流机器人传输系统应用的医院建筑总体布局方式。
3.1 线性快速通行轴线布局
第一种是医院整体被快速通行轴线串联的布局,以广州中山大学附属第一(南沙)医院为典型代表(以下简称南沙医院)。南沙医院地处广州市南沙区横沥岛西侧,医院规模及占地面积较大,其院区被城市道路——东合路划分为南北两区。主体形成错落分布的格局,院区中轴处设有交通廊桥将医院南北两区的各栋建筑联系起来。
医院智能物流机器人传输系统在院内承担的运输任务主要是全院级物流层面,负责运输清洁被服、大宗物资、餐食等,总计约占全院需要运输物资的12%。院内各智能物流传输子系统的动线设计总览如图1所示。

图1 南沙医院智能物流系统动线设计总览
由于医院院区占地面积大且南北跨越距离远,院区被市政道路分为南北两部分。为了使AGV机器人小车可以快速地在南北两区通行,南沙医院在中轴线廊道的地下二层设置专用夹层通道作为地下AGV快速通道,机器人机体在快速通道中可以加速至1.6~2m/s行进,快速通行较长水平距离。
院内物资运输流程为:外部药品或大型物资集中运输至南区科研楼的地下一级药品库存储,分装后由机器人机体装载经AGV快速通道和物流专梯运输至需求科室。布局上主要医疗区域都围绕中轴线展开,同时专有物流梯和库房紧靠快速通行轴线设置,使得机器人机体的工作路径精简、流畅,整个物流系统的工作效率因此提升。
3.2 闭环通行布局
第二种是医院整体或大部分内部流线可以形成闭环布局,以佛山妇幼保健院新城院区为典型代表(以下简称佛山妇幼保健院)。
佛山妇幼保健院的建筑整体采用合围布局。院内采用了气动式、箱式、物流机器人三种智能物流传输子系统,可通过环绕式建筑布局使各类物资快捷、便利地在全院传输。在目前实际使用中,医院采用智能物流机器人在院内不同科室间传输标本,服务的楼层有门诊楼2、3、4、5层和医技楼2、3层。大致的物资运输流程为:系统接收到任务后,安排机器人机体前往出发科室,到达出发科室接到需要运送的标本后再前往目标科室,完成运送任务后可以就近执行新任务或返回充电基站。其建筑的环绕布局便利了智能物流机器人在院内各科室部门间的周转,减少了工作路径距离,提高了物流系统的工作效率,降低了机器人的机体数量成本。如图2所示。
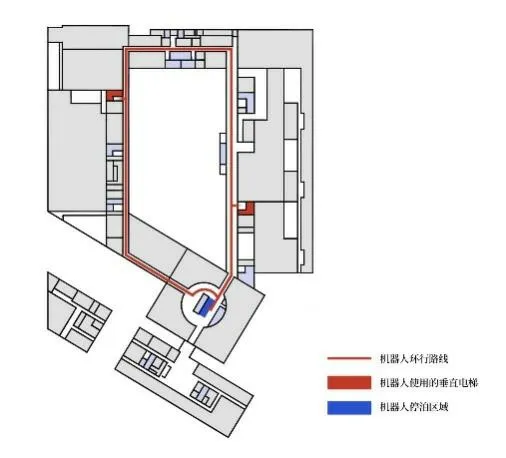
图2 佛山妇幼保健院平面图及内部智能机器人运行环线示意
由上可以总结出,适宜智能物流机器人传输系统应用的建筑布局主要有以下特点:一是内部具有快速通行路径,可以是线性的或者是闭环式的,也可以是垂直方向的;二是流线组织较为简明,没有太多复杂的支路流线;三是建筑内部空间连贯,不被外部空间打断。
4 适宜引入智能物流机器人传输系统的科室
医院不同科室的医疗流程、功能房间、空间组织等都各有不同,部分科室对智能机器人的需求更强,且其原有的空间条件和医疗流程都更加适宜机器人加入;引入智能物流机器人辅助时,在原有的建筑空间基础上,通常只需要进行较小限度的改造甚至不需要改造。这类科室主要有手术室、消毒供应室、检验科等。下面以一些科室为例讨论智能物流机器人在这些科室应用时采用的工作模式及对应的建筑改造措施。
4.1 消毒供应室
作为医院内部的重要物资保障科室——消毒供应中心与医院其他科室间的物资配送量大、配送频繁、配送科室多,同时科室内部的物资周转量较大。智能物流机器人传输系统在消毒供应中心的应用主要分为两方面:一是在消毒供应中心与其他物资需求科室之间负责物资传输,可以满足配送效率、配送能力和配送安全性的要求;二是在消毒供应中心内部参与物资消毒流程,可以减少库存占用,提高物品的使用效率。
智能机器人在消毒供应中心内部参与物资消毒流程时,机体的工作路径基本与人工运输一致,因此不需要对建筑环境做过多改造。但是需要注意的是,消毒供应中心内部的洁净分区不能直接跨越,因此需要设置对应的机器人消毒关卡,可设置专门的缓冲间配备消毒门或在隔离墙内嵌消毒舱。智能机器人在消毒供应中心与其他物资需求科室之间负责物资传输时,除了需要考虑院内的通行情况对系统的工作效率的影响外,由于消毒供应中心所运输物资的感控要求特殊,也要考虑机器人机体及传送物资如何跨越不同的洁净要求区域,现阶段通常利用缓冲区结合照射消毒方法。
4.2 手术室
手术室内,执行手术时需要高频次配送物品。应用智能物流机器人进行物资库存管理和配送,能快速地响应并高效地配送手术室所需物资,减轻医护工作负担,并且减少手术过程中医护不在场的风险,保证物资库存与配送过程的安全性和精确性。智能物流机器人传输系统在手术室内的主要工作为管理耗材器械和药品、运送手术耗材器械和药品、运送污物和回收器械、运送标本等。机体执行运输工作时的路径基本与人工运输一致,不改变原有的工作流程,智能系统管理物资需要专用的库房和机房。因此只需要在物流机器人工作的区域改造建筑环境,使其适合物流机器人工作即可。建筑环境改造主要分为两部分:设置智能系统机房和库房、改造机器人机体工作路径。
科室内部还剩余空余房间时,可利用空余房间设置智能机器人机房,用于停泊充电机器人机体、监控和维护机器人系统的工作。需要注意的是,洁净区域工作的机体的停泊点需要设置在洁净区域,污染区域工作的机体的停泊点需要设置在污染区域,机体不可以跨越洁净区域和污染区域混行。科室内部没有空余房间时,可以在廊道空间内划分边角区域用于停泊机体,监控和维护机房可以灵活地和其他办公房间合用。
机器人机体工作路径上要进行走廊空间分流,加装机器人门禁等。走廊宽度满足时,可以在地面进行分区,划分出一部分宽度专门供机器人机体通行使用,减少机器人避让人员产生的停顿时间,在提高运输速度的同时降低了人员与机体相撞的风险。此外,机器人工作需要穿行的门处要进行关门器改造和机器人门禁增设,以便机器人可以自主开启和通行[3]。
4.3 其他科室
一些其他科室因特殊需求,也适合使用智能机器人代替人力进行一些物资运送。如检验科采用智能机器人配送标本,可满足7×24小时、多科室、高频率、远路程的送检要求;核医学科使用智能机器人配送能减少核辐射对配送人员的伤害;等等。
5 应用智能物流机器人传输系统的医院建筑空间需求
医院智能物流机器人传输系统对建筑空间的需求主要分为三部分:满足智能机器人机体工作的通行空间、智能系统管理物资与对接智能机器人机体的智能库房空间,以及满足智能机器人机体停泊与维护的后勤空间。既有医院可以改造已有的建筑房间或扩建以满足要求;新建医院设计时,需提前预留一些建筑空间如机房、停泊站点、垂直交通电梯等以供后期硬件配套设施使用。
5.1 通行空间
专有通道可以大幅提升机体的运行速度,但是建设成本较高。为了集约使用建筑空间,智能机器人机体在执行运输任务时,水平交通和垂直交通均可利用已有的廊道及电梯。
在和人员混杂水平通行时,配备有视觉系统和避让设置的智能机器人的运行效率通常不会受到太大影响。机器人机体在医疗科室之间执行运输任务时,尽量选择和医护人员共用医用廊道,一是因为医用廊道上人流密度较小;二是因为在只有医护没有病患的廊道上,机器人机体的安全性较大;三是若要系统的运行效率较高,机体最好使用医护梯或物流梯进行跨楼层运行,此时选择医护廊道可以便利机器人机体乘梯。机器人机体在医疗科室内部执行运输任务时,条件允许的情况下,可以在地面上进行分区,在廊道上划分出一段窄道,专门给机器人机体通行使用,提高通行速度的同时可以减少人机碰撞的意外。
根据机器人的运行详细数据统计,机器人完成配送任务总耗时中等待电梯的时间占比较大,因此需规划好机器人电梯乘坐方案。在条件允许时最好让机器人机体使用无人使用的空余电梯或物流梯以提高运行效率,在大多数条件有限的情况下可以和医护人员共用医护电梯;若不得不让机器人机体使用病患电梯,其运行速度和周转率都可能受到较大影响,此时需要根据具体情况考虑增加机体等。
5.2 库房空间
对接智能机器人机体的智能库房在建筑空间上与传统库房空间基本没有区别,通常只需要在硬件设备和软件系统上配套即可。
5.3 后勤空间
智能机器人机房的位置设置没有较为特殊的要求,可以根据医院情况进行灵活设置。如果院内智能机器人有统一的停泊站点,可以将机房与之结合设置,便于使用。此外,机房和统一停泊站点的结合设置可以在院内药品和物资总库房相邻或相近的地点完成,便于机器人机体装载运送物资。
机器人的停泊站点可灵活设置,院内投入使用的机器人机体较多时可以统一设置,机体较少、使用区域较分散且相对独立时可以分散设置。机器人的停泊站点对空间的要求不高,通常不需要对建筑空间进行特殊改造,只需要选择不影响其他人员通行的靠墙区域留出泊车位,布置刷卡机和充电桩即可。
机器人工作中穿越的门需要设置机器人可自动控制的门禁和改造机械闭门器,使机器人能够全过程实现自主导航运行[4]。
6 结 语
综上所述,适宜智能物流机器人传输系统应用的建筑空间布局通常具有内部空间连贯、流线简明、可快速通行的特点;除了运送物资外,智能物流机器人在消毒供应室、手术室、检验科等特殊科室也有较多需求;同时医院的建筑内部也要为智能物流机器人传输系统提供良好的通行空间、后勤空间与智能库房空间;此外也要预留和配置好机房、停泊站点、垂直交通电梯及一些细节空间。
猜你喜欢
中国典型病例大全(2022年13期)2022-05-10
中老年保健(2021年7期)2021-08-22
小学科学(学生版)(2019年12期)2020-01-06
孩子(2019年5期)2019-05-20
柴油机设计与制造(2018年3期)2018-10-13
基层中医药(2018年2期)2018-05-31
中国铸造装备与技术(2017年3期)2017-06-21
中国卫生(2016年6期)2016-11-23
瞭望东方周刊(2016年8期)2016-03-12
四川生理科学杂志(2014年2期)2014-02-28