
VR技术在船舶舱室三维图像重建中的应用
2023-06-13 09:12林琳
舰船科学技术 2023年9期
林 琳
(1.河南科技大学 应用工程学院,河南 三门峡 472000;2.三门峡职业技术学院,河南 三门峡 472000)
0 引 言
随着视景仿真和图像融合调度处理技术发展,结合视觉传达和视景仿真技术,构建船舱舱室三维图像的重建结构模型。通过视景仿真和三维立体成像软件,实现对船舱舱室三维图像重组。通过三维建模软件设计,提高对船舱舱室的三维空间传达和细节展示能力。在VR视景仿真环境中,构建船舱舱室的沉浸式视景仿真模型。通过计算机感知和三维虚拟重构件数,进行船舱舱室三维特征点分析,结合视觉分析和视景仿真技术进行船舱舱室三维图像重建的沉浸式交互环境设计[1]。
传统方法中,对船舱舱室三维图像重建技术主要采用计算机模型参数分析方法,使用船舱舱室三维渲染技术,结合图形图像VR视景重建,通过三维视景拟合和跟踪渲染技术,提高对船舱舱室三维图像仿真和重构能力[2]。但当前方法对船舱舱室三维图像的视觉表达能力不好,图模型参数匹配能力不好。针对上述问题,本文提出基于VR技术的舱室三维图像重建技术。首先采用锐化模板匹配动态增强技术和帧点扫描技术实现对舱室的三维立体图像扫描和特征提取;然后通过光场边缘轮廓检测和模板分块融合匹配,结合VR视景重建技术,实现对舱室的三维图像重建。最后进行实验测试,验证本文方法在提高船舱舱室三维图像重建视觉表达能力方面的性能。
1 舱室三维立体图像扫描和视点跟踪
1.1 舱室三维立体图像扫描
为了实现对船舱舱室三维图像重建,采用模糊的纹理梯度信息增强方法,建立三维场景点跟踪模型。采用视差线索和散焦线索相融合的方法,结合相邻2个视角的图像视差分析,构建舱室三维立体图像扫描模型[3],通过视点跟踪识别和图像像素特征分解,采用VR技术实现对舱室的三维图像重建,总体实现结构图如图1所示。

图1 船舱舱室三维图像重建结构Fig.1 3D image reconstruction structure of ship cabin
通过对船舱舱室三维噪点分离和图像网格区域分割,采用锐化模板增强技术建立船舱舱室三维图像轮廓分配模型[4],根据图像像素奇、偶的帧扫描,得到图像采集输出为:
式中:A为 船舱舱室三维图像成像在x方向的四维光场分布像素值;t(x)为船舱舱室三维相邻2个视角的图像视差;J(x)t(x)为船舱舱室三维图像微透镜阵列与主透镜的距离。
根据相移理论,分析每帧扫描的激光船舱舱室三维关联像素值大小相同,为W×N,在空间域偏分布域中,得到亚像素单位偏移量检测约束函数定义为:
其中:x∈Ω为局部线性模型增量分布行域,双线性插值的输入特征量为g={g(i),i∈Ω};为滤波器对每个匹配代价函数;ℜn为引导图像和待滤波图像的协方差。
采用像素偏移扫描的方法,得到船舱舱室三维图像成像单个像素值I(i,j)分布的边界特征量为:
式中:J(w,e)为双线性插值图像;ai为窗口大小;w为模糊加权系数;φ(xi)为滤波图像的协方差;ei为多个窗口的平均误差;b为鲁棒性设置的阈值;yi为自适应像素分离特征值。
根据上述分析,采用舱室三维立体图像扫描技术,实现对船舱室三维立体图像的纹理轨迹渲染,得到舱室三维立体图像的多标签的图像分布为:
其中:xir为船舱室中心孔径图像像素;为要断裂的点与点之间边的权值;Airp为每幅图像的像素分辨率,采用多标签亚像素偏移方法,实现船舱舱室三维图像重建[5]。
1.2 船舱舱室三维图像滤波
结合像素匹配模型和滤波抑制方法实现三维图像的不规则点滤波和修正处理,通过光场边缘轮廓检测[6],得到图像的背景种子点配准模型,图像平滑区域的滤波函数为:
其中:Gij(x,y)为微透镜阵列的模板像素;(xij,yij)为在图像平滑区域的层位像素级;ε为传感器像素集合,船舱室的三维重建的分块区域大小为:
其中:xij和yij为宏像素的大小;x为目标物的深度信息特征量;y为3D结构对象的惩罚特征量;σ为半全局匹配特征值。
根据参考的模板图像动态特征,船舱舱室三维图像的稀疏性分解过程如下式:
式中:Wij(x,y)为图像的边缘轮廓信息的模板参数;Oij(x,y)为曲线轨迹融合跟踪轨迹。
根据图像的信息增强处理结果,得到舱室三维图像表面(a,bm)点处的连续重构特征为:
其中,Mi及MT经过Wi投影后的得到反映舱舱室三维图像表面的子空间。令Ix为一个舱舱室三维图像的模糊特征集,其中x=P,N表示船舱舱室三维图像的区域大小,采用梯度运算方法进行特征分解,实现对船舱舱室三维图像轮廓特征提取和重构。
2 船舱舱室三维图像重建
2.1 船舱舱室三维图像增强与特征提取
采用信息融合方法进行图像的Kalman滤波,采用锐化模板增强方法进行船舱舱室三维图像的信息增强处理,建立船舱舱室三维图像的统计形状分析模型,得到船舱舱室三维图像成像的自动匹配算子为g={g(i),i∈Ω},对采集的原始三维船舱舱室图像进行三维提升反变换处理,得到分割尺度为:
式中:i=1,2,···,T为像素点序列;N为船舱舱室三维图像轮廓重建的维数;c1为一阶统计特征量;c2为二阶统计特征量;S为灰色子空间序列,三维图像像素序列的分布轮廓特征表达式为:
其中:Ts为图像的块匹配特征量;Tp为相应图像块之间的视觉相似度;Tc为轻量化的动态模板匹配系数;ai为 半全局匹配特征量;ε为视差估计系数;t为相应图像块之间的视觉增强分量。
分析匹配代价在全图的不同方向特征量,得到融合结果为:
其中:Ts为船舱舱室三维图像成像的单尺度特征值;Tp为线性变换周期;Tc为船舱舱室三维图像成像采集周期;cj为船舱舱室三维图像线性变换的加权系数;Np为船舱舱室三维图像的模糊子空间特征分量。
由此实现对船舱舱室三维图像增强与特征提取。
2.2 船舱舱室三维图像重建输出
在对船舱舱室三维图像增强与特征提取的基础上,采用可微分的 PatchMatch模块匹配方法,得到船舱舱室三维图像的层级位分布像素级J(Wi),可以用如下形式简化:
其中:H1为稀疏注释的视差图;H2为稀疏表示的代价系数;λ为特征值。设{w1,w2,···,wdi}表示船舱舱室三维图像轮廓向量加权,基于深度学习的双边网络学习,得到大规模的数据集分布密度大小关系{λ1≥λ2≥···≥λdi},其中{λj|j=1,2,···,di}所对应的特征向量。
基于空间变换和视图合成方法,得到船舱舱室三维图像重建的中心矩为:
式中:U为一N×N的直方图分布矩阵;V为一个2×2的流形矩阵,表示为三维几何信息的动态分配特征量,S是不同条件的适应性分布集。
综上分析,得到三维重建输出:
综上分析,通过光场边缘轮廓检测和模板分块融合匹配,结合VR视景重建技术,实现对舱室的三维图像重建。
3 性能测试与分析
在对船舱舱室三维图像重建的仿真实验中,采用VR技术进行三维图像的视景重构,使用Visual C++6.0底层开发的编程软件,设定船舱舱室三维图像的宽度withd=12,匹配像素百分比为37%,采用分辨率为960×1 280像素成像仪进行船舱室的三维成像采集,边缘像素检测点的裁剪分割分块特征值为192×384,根据上述参数设定,得到初始的船舱室的三维图像采集如图2所示。

图2 初始的船舱室的三维图像采集Fig.2 Initial 3D image acquisition of the cabin
根据图2的图像采集结果,采用本文方法进行图像三维重建的增强处理,得到图像增强结果如图3所示。

图3 船舱室的三维图像增强结果Fig.3 3D image enhancement results of the cabin
分析图3得知,采用本文方法能有效实现对船舱室的三维图像重建,提高图像的细节增强能力。在此基础上实现对船舱室的三维图像重建,重建结果如图4所示。

图4 图像三维重建结果Fig.4 Image 3D reconstruction results
为了对比性能,采用本文方法和传统方法,以船舱舱室三维图像重建输出图像的信噪比(SNR)、特征点的匹配精度等指标为测试结果,得到对比结果见表1。分析可知,采用本文方法进行VR三维图像处理和船舱舱室三维图像重建,输出的信噪比较高,特征点匹配精度较好,说明船舱舱室三维图像VR视景重构的视觉表达能力较强,重建效果更佳。
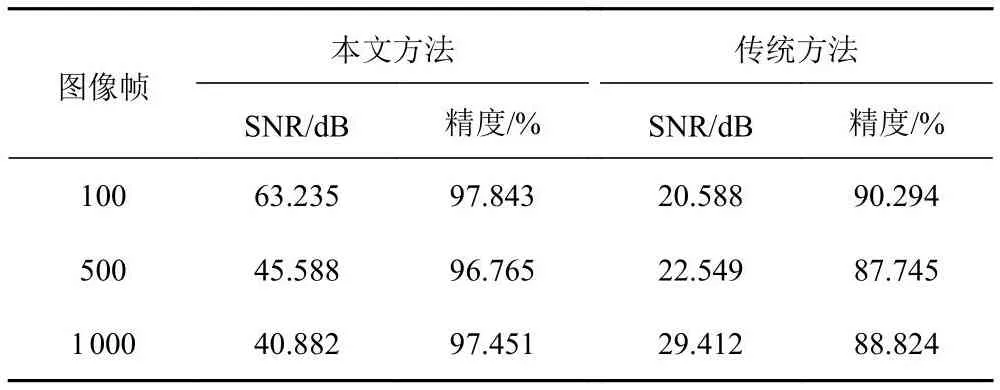
表1 船舱舱室三维图像重建性能对比Tab.1 Comparison of 3D image reconstruction performance in cabins and cabins of ships
4 结 语
在VR视景仿真环境中,构建船舱舱室的沉浸式视景仿真模型。通过计算机感知和三维虚拟重构件数,进行船舱舱室三维特征点分析。结合视觉分析和视景仿真技术,进行船舱舱室三维图像重建的沉浸式交互环境设计。本文提出基于VR技术的船舱室三维图像重建技术,测试表明,本文方法的重建效果较好,指标性能表现优越。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年21期)2022-12-12
阅读(快乐英语高年级)(2019年2期)2019-09-10
电子测试(2018年4期)2018-05-09
船海工程(2015年4期)2016-01-05
焊接(2015年12期)2015-07-18
舰船科学技术(2015年8期)2015-02-27
舰船科学技术(2015年8期)2015-02-27
振动、测试与诊断(2014年4期)2014-03-01
船海工程(2013年6期)2013-03-11
