
航空声呐浮标水中释放过程数值分析
2023-06-13 09:12赵海潮
舰船科学技术 2023年9期
程 浩,赵海潮
(中国船舶集团有限公司第七一五研究所, 浙江 杭州 310023)
0 引 言
航空声呐浮标(下文简称浮标)是航空反潜的主要搜潜装备,航空反潜时,通过空投浮标,依据水下目标在海洋环境条件下的特征,对目标进行搜索、识别、定位和跟踪,并为攻潜武器的使用提供目标指示。战场环境瞬息万变,浮标水中释放的效率,在很大程度上决定了航空探潜的效率和精度,直接影响到作战部署的准确性[1 – 2]。目前,国内关于浮标水中释放过程的研究较少,有必要开展相关工作,为高效率地使用浮标提供理论支撑。
浮标空投入水后,漂浮气囊及水面电子仓保持直立姿态漂浮于海面,水下声系统及约束筒带着传输电缆和弹性绳向下运动。传输电缆线径较小,释放过程中的牵引力几乎为0,对水下声系统的干扰可以忽略。水下声系统随约束筒一起下降,先加速运动,再匀速运动,接近浮标设置的工作深度时,弹性绳开始拉伸,水下声系统开始减速运动[3]。图1为声呐浮标入水后释放过程示意图。

图1 浮标释放过程示意图Fig.1 Schematic diagram of buoy deployment process
1 加速运动阶段
1.1 加速阶段运动方程
浮标入水后,水下声系统在惯性力的作用下先加速运动,设位移y是时间t的函数;受到流体阻尼力,阻尼力正比于速度平方;加速过程中存在虚质量。加速阶段的运动方程如下式[4]:
式中:M为系统虚质量;y¨ 为系统加速度;ρ为海水密度;CD为 系统阻力系数;D为系统特征直径;y˙为系统速度;m为 系统在海水中质量;g为重力加速度。
求解二阶常系数非线性微分方程(1),得到:
1.2 运动系统虚质量
浮标水下声系统在水中变速运动时,会带着周围的水体一起运动,从而受到水体的反作用力,该力大小与运动系统加速度成正比,该力与加速度之比称为附加质量。若是水下声系统在水中质量为m,产生的附加质量为ma,m与ma之和称为虚质量,记作M。根据流体力学知识,运动系统的附加质量与其形状和流体的密度有关[5 – 6]。
式中:Ca为附加质量系数;L为运动系统的特征长度。
关于圆柱体的附加质量,于肖宇等[7]开展了薄壁圆筒结构附加质量的实验研究,通过对圆柱结构和圆筒结构附加质量的测量,得出了两者之间的比例常数。倪宝玉等[8]基于势流理论开展了弹体落水过程中附加质量变化影响研究,得出附加质量的变化主要取决于弹体形状和湿表面积的变化。冯双双等[9]基于相对运动原理得出了在无限流体域中不同长细比圆柱的附加质量,给出了附加质量系数与长细比之间的关系。
参照上述文献,结合浮标水下声系统结构特点,研究声呐浮标水下声系统释放过程时,忽略海洋水文条件的影响,认为水下声系统在未展开时为圆柱体质量块,沿中心轴线运动。浮标水下声系统在无限域中非定常运动时可以按照图2所示的示意图进行测量,将运动系统放置在水槽内,通过牵引绳带动运动系统移动,使用高清摄像机记录牵引绳上标志点位移变化,近似计算出标志点移动时的速度和加速度,同时记录从拉力计上读出的流体总阻力。结合运动系统定常移动时的阻力,根据流体总阻力与定常移动阻力之差,可以得到附加质量。

图2 附加质量测量方法示意图Fig.2 Schematic diagram of added mass measurement
测量长度与直径之比不同的圆柱体变速运动时的总阻力,减去对应速度下定常移动的阻力,可以得到多组附加质量,拟合附加质量系数Ca与长径比γ=L/D的关系,绘制出附加质量系数Ca与长径比γ的关系曲线如图3所示。

图3 附加质量系数随长径比变化曲线Fig.3 Curve of added mass coefficient with ratio of length to diameter
通过查询图3中的圆柱体长径比对应的附加质量系数,可以求出不同类型浮标的水下声系统变速运动过程中的附加质量。
2 匀速运动阶段
浮标水下声系统加速运动时,随着速度增加,受到的非线性阻尼力也在增加,经过一段时间后达到受力平衡,水下声系统开始以匀速V0下降,水下声系统匀速运动阶段下降距离如下式:
3 减速运动阶段
3.1 减速阶段运动方程
浮标水下声系统匀速下降到接近预先设置的工作深度时,弹性绳开始拉伸,随着弹性绳拉伸,水下声系统开始受到弹性力,弹性力的大小与弹性绳的拉伸量有关,减速阶段的运动方程为:
在弹性力作用下,产生近似简谐运动。解微分方程(6)比较复杂,可以将非线性阻尼力等效为线性阻力,等效线性阻力系数为R。 在简谐运动过程中,R可以通过一个周期内的能量损失来获得,式(6)转化为下式:
求解式(7),得到位移表达式:
式中:k为弹性绳的弹力系数;C1和C2为常系数,由初始条件确定。
3.2 等效线性阻力系数
在简谐运动中,假定运动系统实际的非线性阻力与等效线性阻力在每个周期内所产生的能量损失相等[10 – 11],若是简谐运动记作x=Asinωt,则x˙=Aωcosωt,简谐运动的非线性阻力运动一个周期所消耗的能量为E1,等效线性阻力运动一个周期所消耗的能量为E2。
令E1=E2,得到
4 数值分析
已知某型浮标水下声系统的尺寸和水中质量,直径D=117mm ,有效长度L=550mm ,水中质量m=5kg,代入相关公式计算得到水下声系统释放过程各阶段的位移和速度变化关系式。
4.1 加速阶段数值分析
浮标入水后,水下声系统先是加速运动,加速运动阶段速度变化如下式:
水下声系统加速阶段的速度变化曲线如图4所示。可以看出,加速时间与阻力系数CD关系密切,阻力系数越小,加速时间越长。根据运动体形状选择阻力系数,CD在 0.2~1.1之间取值时,水下声系统在1.5~3.8s内达到匀速。
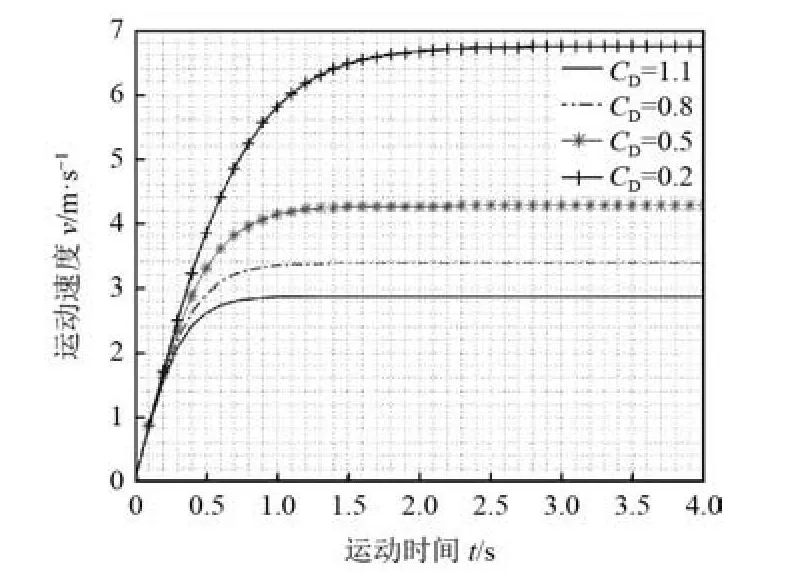
图4 加速阶段速度变化Fig.4 Speed vs time during accelerated phase
结合典型声呐浮标水下声系统的形状尺寸,选取阻力系数为CD=0.8,水下声系统在1.5s 时达到匀速,此时速度V0=3.37m/s。
水下声系统加速阶段位移变化函数如下式:
当阻力系数CD=0.8时,绘制位移变化曲线,如图5所示。可以看出,在1.5s之前,水下声系统位移变化非线性增加,位移为4.2m ;1.5s后,水下声系统位移开始线性增加,1s 内增加位移是3.37m。

图5 加速阶段位移变化Fig.5 Displacement vs time during accelerated phase
4.2 减速阶段数值分析
选取浮标弹性绳的弹力系数k=8N/m ,弹性绳开始拉伸时作为新的计时起点和位移起点。在该计时起点,初始位移为0,初速度为V0,水下声系统在惯性力作用下强迫振动,谐振频率为0.54rad/s,阻尼系数1.07。所以,水下声系统的减速阶段位移变化如下式:
减速阶段位移变化曲线如图6所示。从数值分析来看,弹性绳第一次拉伸到最大位移后,若是不考虑海洋环境带来其它激励力,该系统很难再次振动起来。弹性绳拉伸4s 时,达到最大位移6.139m,然后快速稳定下来,稳定时间9s。

图6 减速阶段位移变化Fig.6 Displacement vs time during decelerated phase
4.3 释放时间数值分析
浮标水中释放时,水下声系统的加速阶段和减速阶段的时间都很短暂,花费时间较长的是匀速运动阶段。根据浮标预设工作深度,可以计算出浮标布放时间。假定浮标的工作深度设置为H,加速阶段位移和时间分别为y1和t1,减速阶段位移和时间分别为y2和t2,则浮标布放时间计算如下式:
若是浮标预设工作深度为200m,浮标入水后的水下声系统释放时间∆t=66.8s。
5 结 语
根据实际使用流程,将浮标的水中释放过程分为加速阶段、匀速阶段和减速阶段。分析加速阶段的受力情况,建立加速运动方程,求出水下声系统加速过程中的位移和速度变化函数;介绍附加质量的求解方法,分析减速阶段的受力情况,建立减速运动方程,将减速运动方程进行简化,求出减速阶段位移变化函数;介绍非线性阻尼力等效为线性阻力的方法,给出了匀速阶段位移变化函数。选取典型浮标的运动参数进行数值分析,推导出了浮标水下声系统的加速时间、加速阶段速度变化曲线、加速阶段位移变化曲线、减速阶段的位移变化曲线。根据声呐浮标设置的工作深度,可以求出水中释放时间。所使用的分析方法能够评估出更多型号的声呐浮标水中释放时间,为作战流程的设计提供依据。
猜你喜欢
家教世界·创新阅读(2023年3期)2023-06-09
家教世界·创新阅读(2023年2期)2023-06-07
家教世界(2023年4期)2023-03-04
昆明医科大学学报(2021年12期)2021-12-30
英语文摘(2020年10期)2020-11-26
垂钓(2019年2期)2019-09-10
哈尔滨理工大学学报(2018年3期)2018-07-24
中学生数理化·八年级物理人教版(2018年3期)2018-05-31
物理教学探讨(2018年12期)2018-03-06
中国卫生(2014年11期)2014-11-12
