
高分七号星载激光定位模型构建与验证
2023-06-12 07:16:24陈新阳乔志远龙小祥李庆鹏刘啸添钟慧敏王小燕王建华
遥感学报 2023年5期
陈新阳,乔志远,龙小祥,李庆鹏,刘啸添,钟慧敏,王小燕,王建华
1.中国资源卫星应用中心,北京 100094;
2.中国四维测绘技术有限公司,北京 100094;
3.中国科学院空天信息创新研究院,北京 100094
1 引言
激光测高就是利用激光脉冲来测定高度,激光测高仪可在植被特征测量(Simard 等,2011)、森林结构三维建模(Knapp 等,2018)、极地冰雪观测(马跃 等,2015)以及大气运动、气候观测(Adriani 等,2004;Spang 等,2018)等方面发挥着重要的作用。
针对激光测高仪数据处理和检校验证方案,相关领域的学者利用已发射的载荷开展了相应的研究。文汉江等(2011)采用GPS(Global Positioning System)测量数据对GLAS(Geo−science Laser Altimetry System)的高程精度进行了验证分析,并对两者的观测结果差异进行了对比分析;李少宁(2017)以资源三号02 星在轨检校为例,完成了星载激光对地测高系统在轨几何定标研究,结果表明平坦地区激光测高精度优于0.5 m。
高分七号卫星于2019 年11 月3 日发射,其上搭载的星载激光测高仪是中国首个自主研发的对地激光测绘载荷(黄庚华 等,2020)。与之前国内外的激光载荷相比,高分七号激光测高仪有两个新的特点:第一:高分七号激光测高仪采用了全波形记录的测距体制,相对于2016 年发射的资源三号02 星,全波形记录可以包含更多的信息,通过波形处理分析可以获得探测区域内地球表面地形特征和地物的反射率等信息。第二:与美国GLAS 卫星相比,高分七号卫星有两个激光测高仪同时工作,每次数据采集可以得到间距为12.25 km的两轨数据;与2018年发射的ICESat−2卫星相比,高分七号卫星可以记录激光波形的全部特征,并用于分析反演,每个激光测高仪都配备足印相机,在发射激光的同时,对激光出射方向和激光光斑周围的地物成像,记录光斑周围地物环境,与高分七号搭载的测绘相机匹配,可以得到激光足印控制点的位置信息。同时,足印相机还具备确定激光指向方向的作用(国爱燕 等,2020)。
本文实现了国内首颗星载大光斑全波形激光雷达数据的自主处理与验证。本文构建了针对高分七号卫星激光测高仪的严密几何定位模型,应用了测距补偿模型,实现了高分七号激光数据的高精度定位。在波形处理方面,为适应高分七号新型全波形激光测高仪数据处理的要求,使用了移动重心和波形分解的峰值提取方法。同时,高分七号作为第一颗星载多波束全波形激光测高仪载荷,在其几何检校过程中,实现了基于地形匹配与红外探测器结合的指向角标定。在高程精度验证过程中,本文提出了以SRTM(Shuttle Radar Topography Mission)高程验证法、平静湖面高程验证法和野外定标场高程验证法为一体的激光测高综合验证方法,从而使星载激光测高仪高程精度验证过程更全面,结果更准确。
2 方法和原理
2.1 高分七号激光测距原理
高分七号的激光测高仪发射激光脉冲达到地球表面,接收器接收返回脉冲的信号,通过计算激光脉冲特征参数测量激光器与地球表面距离。在测绘领域,可以根据同一位置激光器的实时高度和地球距离,计算地面高度(Anita等,2000)。
如图1所示,图中选取了高分七号激光测高仪一束激光的发射波波形和回波波形,中间省略了部分背景噪声数据。激光测高仪安装在卫星上,并按照设定的频率向目标区域发射激光脉冲,根据激光脉冲的往返飞行时差来计算搭载平台到地面的距离:
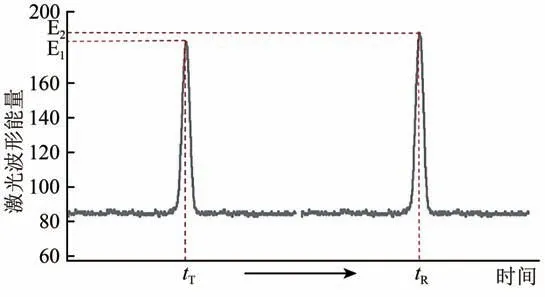
图1 激光测距示意图Fig.1 Diagram of laser ranging
式中,∆t代表激光脉冲的双程传输时间,tT代表激光发射的时间,tR代表激光接收的时间。激光发射时间和激光接收时间在同一时间系统下记录并且时间间隔∆t很小。星载激光测高仪的在轨高度约为500 km,激光器发射的光束到达地球表面并返回激光器的时间大约为3.3 ms(单程约1.65 ms)。遵循双程原则,激光光束达到地球表面并返回接收器的双程距离ρ为
式中,c为光速。
卫星激光光束达到地球表面并返回接收器的单程距离s可以用来计算
2.2 激光严密几何定位模型构建
根据摄影测量学经典理论和激光测高技术基本原理,构建了几何定位的严密定位模型(张剑清 等,2003;李少宁,2017;李国元,2017;陈新阳,2019;Lian 等,2020)。该模型将高分七号卫星在飞行过程中记录的姿态数据、轨道数据、时间数据以及从激光波形数据中提取的测距数据等参数用数学公式体现其内在关系,并得到激光点对应的地球表面上足印点的三维坐标的计算流程。激光测高严密几何模型如图2所示,定义高分七号激光发射的参考点为Plaser,GPS 天线的相位中心为PGPS,高分七号卫星质心为Obody,地面激光足印点为Pground。激光单程传输距离为ρ。
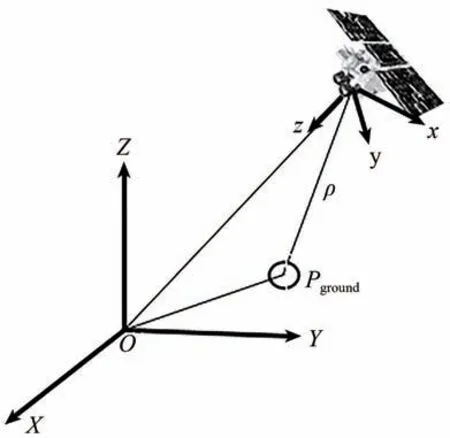
图2 激光测高严密几何模型示意图Fig.2 Diagram of laser altimetry geometric model
高分七号激光器发射激光波束时指向与高分七号卫星本体坐标系存在一定的夹角,假设激光光束指向与本体坐标系Z 轴的负向夹角为θ,在XOY平面上的投影与X轴正向夹角为α,如图3所示。
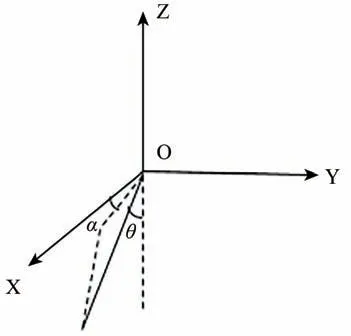
图3 激光光束发射方向与本体坐标系夹角示意图Fig.3 Angle between laser beam emission direction and body coordinate system
根据2.1 节的高分七号激光测距原理,可以求得高分七号激光测高仪的测距值ρ,再考虑由大气折射及硬件误差等构成的高分七号激光测高仪测距改正值∆ρ,可以得到高分七号激光脚点在卫星本体坐标系下的坐标,如式(4)所示:
式中,∆L=[Lx Ly Lz]T为高分七号激光测高仪参考点在本体坐标系中的坐标。由于高分七号激光测高仪GPS 相位中心与卫星整星质心没有完全重合,因此还需要进行高分七号激光测高仪参考点的坐标进行转换。依此原理,可以得到高分七号激光测高卫星的严密几何定位公式:
指向角θ和α为实验室测量值,卫星刚发射的一段时间会以实验室测量值作为数据处理时的参数,但是实验室测量可能会存在不可避免的误差,另外随着卫星上天后在微重为环境下指向角会发生变化,因此在卫星在轨运行平稳后,需要对指向角θ和α定期进行精确的在轨几何检校。同时,为了便于计算,通常将指向投影到坐标轴的3 个方向O−XYZ 上,得到常用的三轴指向角参数(Angle_X,Angle_Y,Angle_Z)。两者的几何关系如式6所示:
2.3 波形峰值提取
高分七号卫星在国内首次采用全波形方式记录激光信号,根据2.1 节中高分七号卫星测距原理,为获取激光的测距值,需要提取高分七号卫星激光测高仪入射波和反射波的波峰位置,但是由于背景噪声的存在,一个波形的最大值处并不一定为波形实际波峰的位置。为减少噪声对测距值的影响,准确获得激光波形的波峰位置,本文在入射波峰值提取时提出了移动重心峰值提取方法,同时结合波形分解提取回波峰值。
2.3.1 移动重心峰值提取法
首先设定搜索宽度阈值,从信号开始位置为起点,以阈值为搜索宽度,从前向后依次计算搜索区间内的重心,并以最大强度能量的重心作为该波形信号的最强反射波峰的位置。
X为每个搜索区间的重心位置,根据高分七号激光信号的特点,本文选择20 为搜索区间阈值,Value(i)为回波波形的DN 值,sum为每个搜索区间内各信号DN 值的总和。根据式(7)即可求得每个搜索区间的重心位置。
高分七号激光测高仪发射波都为单一波峰,每个区间提出一个重心位置,这些重心DN 值最大处即为该波形的波峰位置。
2.3.2 波形分解
对于星载激光测高仪的回波波形,当激光光斑照射在海洋、海冰、平地等平坦的表面时,返回波形往往只有一个波峰,激光光斑照射在高低起伏的山区、树林或者复杂的冰面时,一个光斑内的返回波往往会有多个波峰,同时由于地表粗糙程度不同、地表坡度不同,会造成回波波形出现展宽现象。由于这些波形都是由一个或多个高斯信号叠加而成的,因此,在数据处理过程中需要进行高斯分解(李少宁,2017;李鹏程 等,2015)。
波形分解时首先需要估算每个高斯分量的初始参数,将初始估计参数值代入模型中进行最小二乘迭代,求解最优参数。利用高斯分布函数进行波形拟合公式:
式中,t为波形的起始时刻,Am、tm、σm为第m个波形分量的幅值、均值和标准差,ε为背景噪声。
经过波形分解,无论是单一波峰还是多个波峰,最后一个波形分量对应地表波形的波峰,该分量对应的拟合后的tm即波峰位置。
2.4 星载激光几何检校
星载激光几何检校主要包括指向角标定和测高精度验证两个方面。目前的验证方法中,野外布设红外探测仪检校是最有效、最精确的方法,但是由于该方法成本高,受天气、地形影响大的原因,不能进行大范围检校验证。本文提出基于地形匹配与红外探测器结合的方法进行激光测高仪指向角标定,同时,提出了SRTM 高程验证法、湖面高程验证法和野外定标场高程验证法综合验证方法进行测高精度验证,从而提高了星载激光检校的准确性和时效性。
2.4.1 激光测高仪指向角标定
标定激光测高仪指向与卫星姿态测量系统间夹角关系,分析激光测高仪指向与足印相机的几何关系及时延系统误差,消除激光测高仪与足印相机间的定位残差,然后利用定标结果进行后续生产,从而提高获取的激光脚点的三维坐标精度,达到方便后续利用激光脚点坐标提高双线阵立体测绘影像产品高程精度的目的。
(1)激光测高仪初检校。由于星地间距较远,在指向角不确定的情况下,直接布设靶标可能收效甚微。为了提高几何检校的效率,首先需要采用地形匹配法对激光器的指向角进行初步检校。利用激光测高仪的星下点,利用激光定位模型解算的激光足印点和卫星轨道处于同一平面内,得到激光足印轨迹。再利用激光足印点的初始测高值与相应区域的地形数据进行匹配处理,地形匹配模型如下式所示:
式中,r为激光点与地形的匹配相关系数,(B,L)为遍历区域内对应DEM 数据的地理坐标,n为激光点序列点个数,xi为激光测高值,yi激光点对应的DEM高程值,、分别为xi、yi的均值。
在遍历范围内,以实验室测得的激光测高仪原始指向为基准,确定指向角的偏离范围,并在该偏离范围内形成指向角格网,然后取指向角格网范围内的每个指向角带入式(5),以此类推,激光序列与此处的DSM 数据进行构建相关关系最大处,获取最佳的指向角参数。
通过地形匹配的方法,初步得到激光指向角参数,精确的指向角参数需要通过布设地面探测器来获得。
(2)地面探测器激光测高仪几何检校。选择平坦的区域,铺设地面红外探测器,根据激光过境时,触发的探测器以及地面探测器位置计算出激光足印地面最优位置和足印的形状。
在布设地面探测器前,基于卫星轨道与姿态指向预报信息,结合地形匹配法得到的激光指向角初始参数,预估激光光斑的位置,布设一定范围的红外探测器,确保外场试验可有效捕捉激光足印光斑。
卫星过境后,捕获到激光信号的探测器会显示能量值,能量值越大,说明此处光斑能量越强。利用RTK(Real−time Kinematic)测量被触发的探测器的精确位置,并采用高斯曲面方程对触发的探测器进行拟合,拟合方程如下:
式中,f(x,y)为每个探测器的能量值,(x0,y0)为待求激光光斑质心地面坐标,(x,y)为被触发探测器的坐标,A为高斯曲面的峰值,σx,σy为高斯曲面对应椭圆的长短半轴。
一般认为拟合后的质心(x0,y0)位置为激光光斑质心的最优位置,并通过实测高斯曲面中心的高程得到三维坐标,将该三维坐标带入式(5)中,等式左边激光点实际位置作为已知项,指向角θ、α和测距系统偏差为待求项,即可解算出星载激光指向与测距系统偏差。具体流程如图4所示。
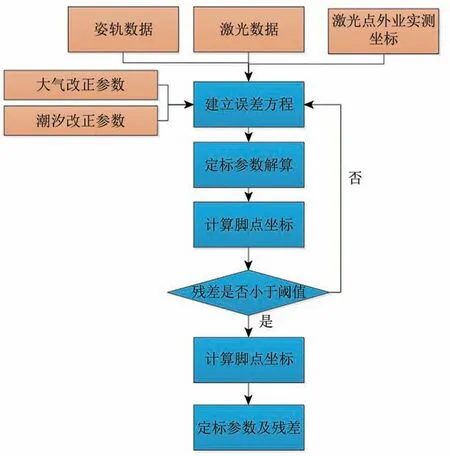
图4 激光测高仪几何定标流程图Fig.4 Flow chart of this paper
2.4.2 激光测高仪测高精度验证
为验证激光测高仪的高度解算结果,本文提出SRTM 高程验证法、湖面高程验证法和野外定标场高程验证法综合验证方法,分别从整体精度、测高稳定度和局部详细精度3个方面验证激光测高仪高程精度。
(1)SRTM 高程验证法。SRTM 是美国航空航天局与美国国防部国家测绘局联合测量的,其分辨率为1″,绝对高程精度优于16 m,相对高程精度优于10 m;绝对定位精度优于20 m,相对定位精度优于5 m(唐新明 等,2021)。SRTM−30 是能够公开大范围获取的最高精度的DEM 数据,可以作为激光测高精度初验的标准,进行激光测高精度的初验证。由于SRTM 数据高程精度与激光测高精度设计精度相比仍然较低,因此本文选择了内蒙古自治区地形较平坦、高程变化较小的草原地区作为本次验证的区域。选取过检校区的激光数据,对比激光点高程与同一位置激光点的高程,计算整体中误差。
(2)平静湖面激光测高验证方法。平静的内陆湖面具有高程变化相对较小、验证面积大、验证成本低的特点,是进行激光测高精度和高程测量稳定度的理想区域。通过提取落在湖面区域的激光高程值,分析激光测高的稳定性和准确性。
(3)野外定标场激光测高精度测试。激光测高精度检验最准确的方式还是通过野外定标场实验进行检查。在野外定标过程中,首先,在检校场附近平坦地区挑选多轨激光测高标准数据,提取校正后计算得到的产品经纬度坐标。然后,根据激光足印点经纬度坐标,利用高精度GPS−RTK 设备测量相应的外业实测高程值,外业实测高程精度满足0.05 m,对比计算激光测高标准产品的绝对精度。
3 实验与分析
3.1 实验与数据
2019 年11 月5 日,高分七号卫星获取了第一轨星载大光斑激光测高仪数据。为验证激光测高仪数据的精度,结合ICESat/GLAS,ZY3−02 等激光载荷在轨激光定标经验,以及光学CCD 相机在轨几何检校经验(徐文 等,2012;蒋永华 等,2013;张过 等,2017;Lian 等,2020),本文设计了高分七号测高仪指向角标定实验和测高精度验证实验,根据实验要求,从高分七号卫星在轨运行后获得的数据中挑选相应数据进行实验,以消除硬件方面的系统性偏差,并从不同角度验证星激光测高数据处理的精度。
3.2 激光测高仪指向角标定结果
根据2.4.1 节的方法,由中国资源卫星应用中心牵头,联合多家相关单位,于2020年6月至7月在内蒙古呼伦贝尔地区进行了多次在轨几何检校试验,实验从6月15日到7月19日共捕获成功5次激光足印,其中,波束一于6月15日、7月14日成功捕获3个光斑,波束二于7月19日成功捕获两个光斑。如图5所示,为6月15日实验轨数据位置示意图。每次实验前,基于卫星轨道与姿态指向预报信息,结合高精度地理参考数据,预估激光指向角,确保外场试验可有效捕捉激光足印光斑高程精度。根据预测结果采用自动调平的探测器捕获激光足印,高分七号卫星的光斑大约为15—20 m,由于存在大气散射的问题,激光光斑的能量分布范围将被拓宽。综合考虑试验场环境、仪器数量、实验技术要求等因素,本次外场实验过程中靶标间的间隔设在5—7.5 m。以7月14日在轨定标实验为例,如图6所示为激光红外探测器布置图和接收到的光斑能量结果。
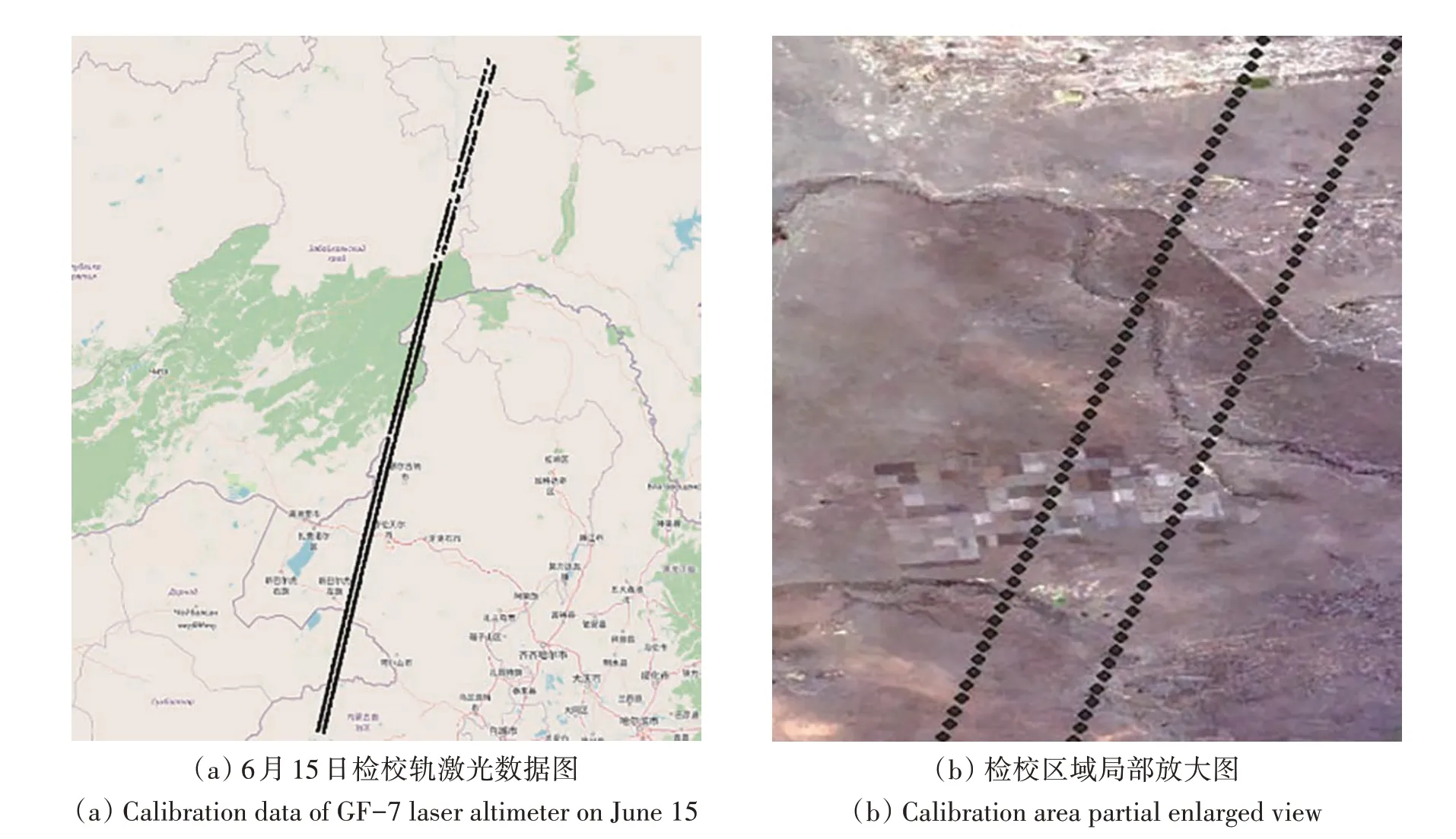
图5 高分七号激光器检校数据Fig.5 Calibration data of GF−7 laser altimeter
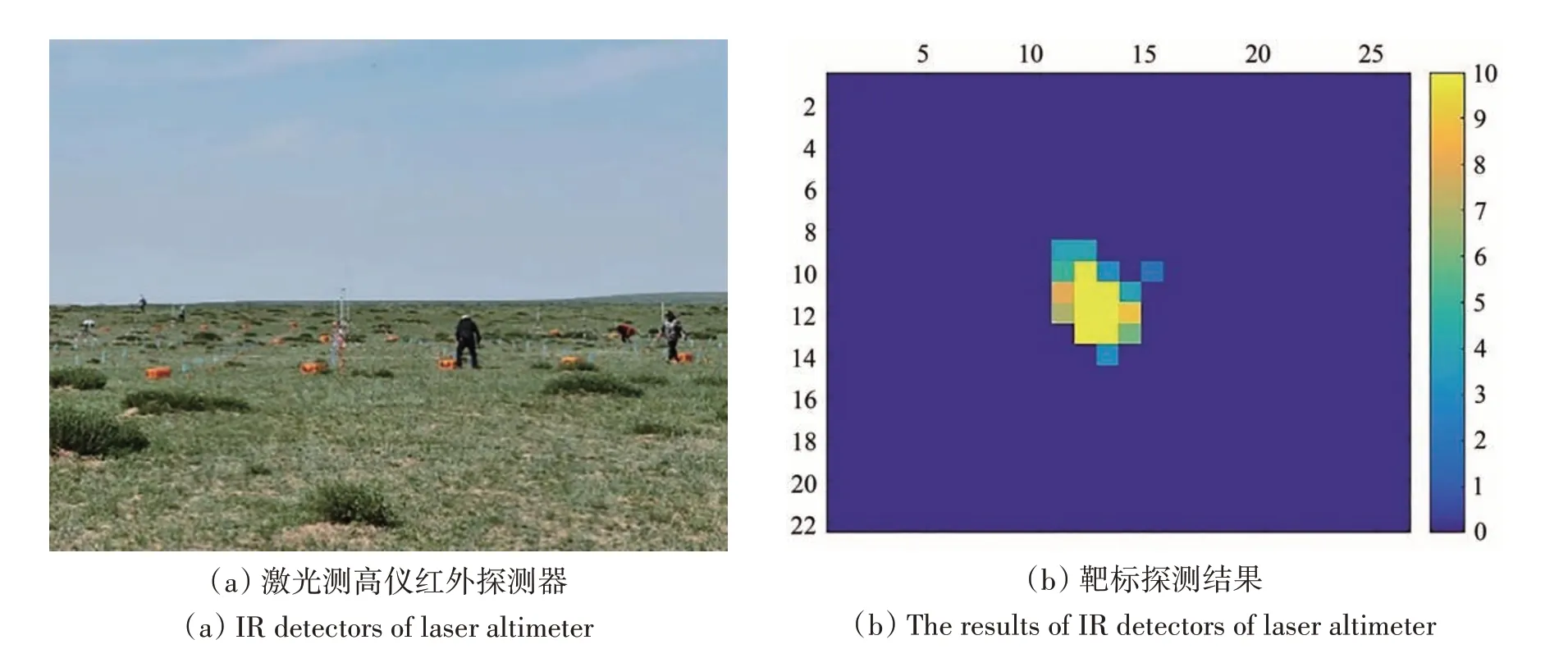
图6 激光测高仪红外探测器布设及探测图(坐标轴为实验时铺设靶标数量,颜色代表激光器接收到的能量强度)Fig.6 IR detectors of laser altimeter and results(Axis represent the number of IR detectors and the color represents the energy)
通过靶标获取的激光光斑位置信息,与使用实验室激光安装角度信息进行对比,同时将指向角θ和α投影到坐标轴的3个方向O−XYZ 上,得到常用的三轴指向角参数(Angle_X,Angle_Y,Angle_Z)。经过计算,确定两个激光器的指向变化,校正激光器指向角。
校正激光指向角后,使用校正后的指向角参数带入式(5)计算外场实验捕获到的激光光斑的位置,并与外场实验时靶标获取激光光斑的实际位置进行对比,结果如表1所示。

表1 激光测高仪定标结果Table 1 Results of laser altimeter calibration
激光器指向标定,消除指向角误差后,激光器1 两个实测点位经纬度误差优于10−5°,高程方向,误差最大0.078 m;激光器2两个实测点位经纬度误差优于10−5°,高程方向,误差最大0.136 m。
同时,利用足印相机进行平面对比分析:将地面实际点位中心反算到足印相机像方,通过像点坐标稳定性复核激光定标精度。
高分七号足印影像分辨率为3.2 m,根据表2中的行列坐标误差,可以得到7 月14 日的足印相机平面方面,误差为垂轨方向为0.1×3.2=0.32 m、沿轨方向为0.06×3.2=0.192 m。与采用激光对地高程反演的位置差一致。

表2 激光测高仪定标结果(像点位置)Table 2 Results of laser altimeter calibration(pixel position)
可见激光器1两组参数互检的平面误差最大为0.35 m,对应指向角误差约为0.15″,表明激光连续测距(短距离)的稳定性和标定精度优于0.1 m;
激光器2两组参数互检的平面误差最大为0.9 m,对应指向角误差约为0.38″,表明激光连续测距(短距离)的稳定性和标定精度优于0.15 m。
3.3 SRTM高程验证结果
本文选取了2020年6月5日第3267轨,2020年7月24日第4010轨,2021年2月25日第7298轨,经过内蒙古的3轨激光数据。结果如表3、表4所示。
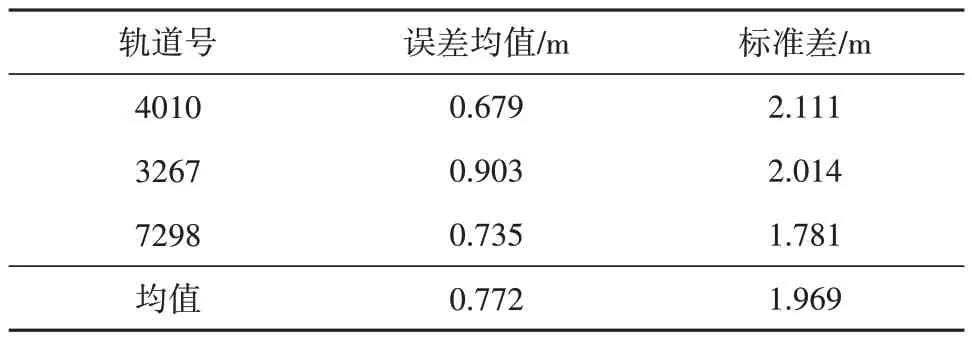
表3 激光器1测高精度初步验证Table 3 Beam 1 laser elevation precision
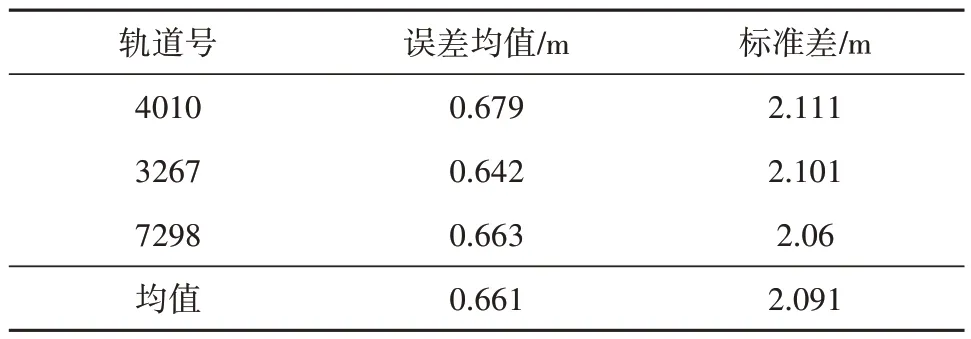
表4 激光器2测高精度初步验证Table 4 Beam 1 laser elevation precision
由表可以看出,与SRTM 对比,激光器1 的高程精度为0.772±1.969 m,激光器2 的高程精度为0.661±2.091 m。结果表明,两个激光器的测高误差均值均优于1 m,标准差约为2 m。标准差较大与DEM 精度低于激光测高的精度有关从一定程度上,初步验证了激光测高的精度。
3.4 平静湖面激光测高验证结果
本文选取了2020 年11 月26 日开机第5914 轨、2021 年1 月29 日第6899 轨,过青海省青海湖湖面的激光点,分析高分七号激光波束1、2 的测高相对精度。
如表5—表8 所示,通过两轨数据的结果,可以得出激光器1 的测高精度(方差)优于0.07 m,激光器2 的测高精度(方差)优于0.09 m。说明激光测高仪具有较高的稳定性和准确性。
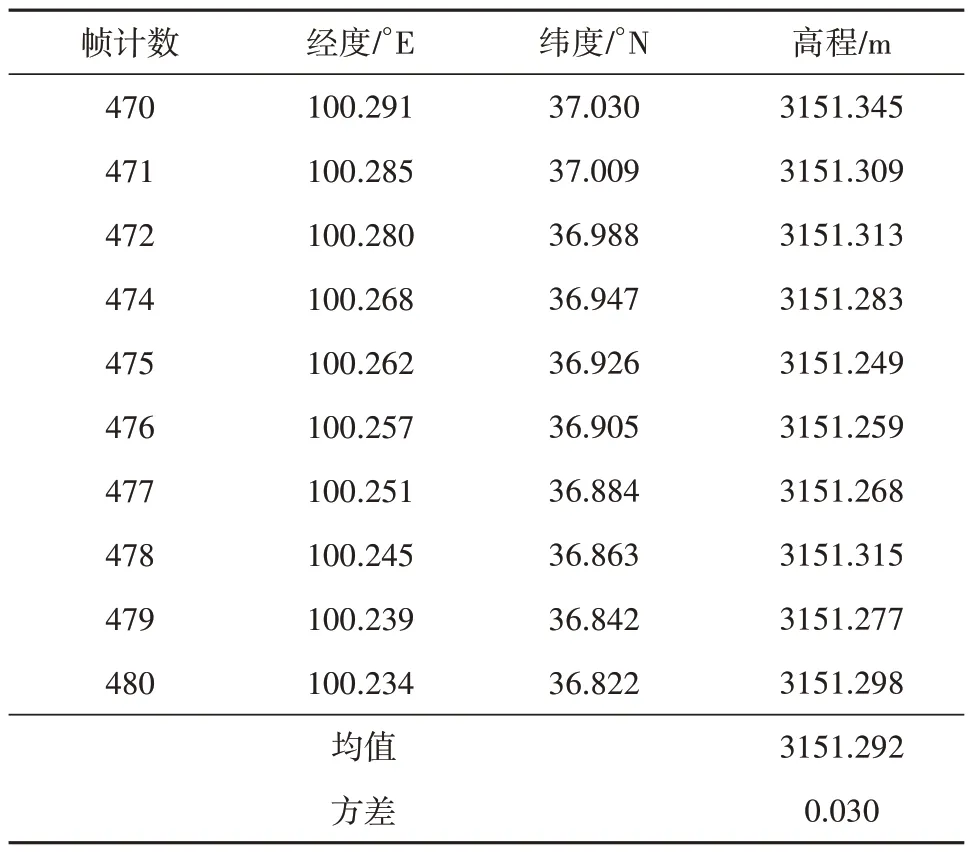
表5 5914轨湖面激光器1测高结果Table 5 The 5914th track beam 1 laser elevation precision compare to Qinghai Lake
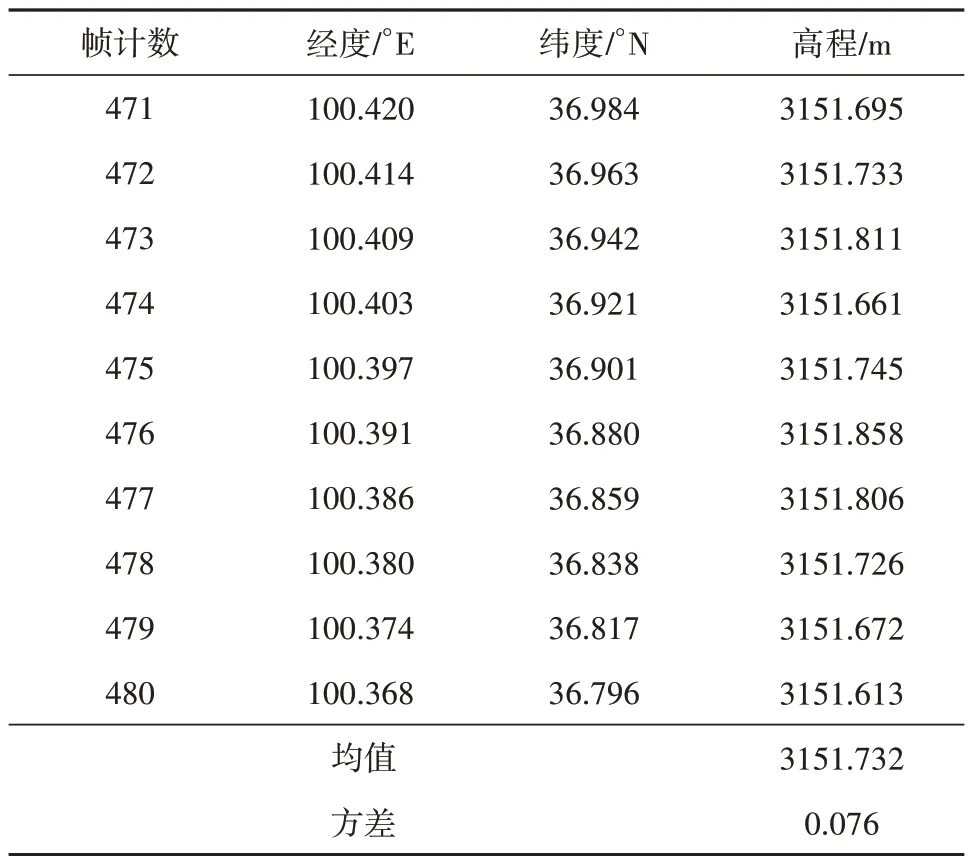
表6 5914轨湖面激光器2测高结果Table 6 The 5914th track beam 2 laser elevation precision compare to Qinghai Lake

表7 6899轨湖面激光器1测高结果Table 7 The 6899th track beam 1 laser elevation precision compare to Qinghai Lake
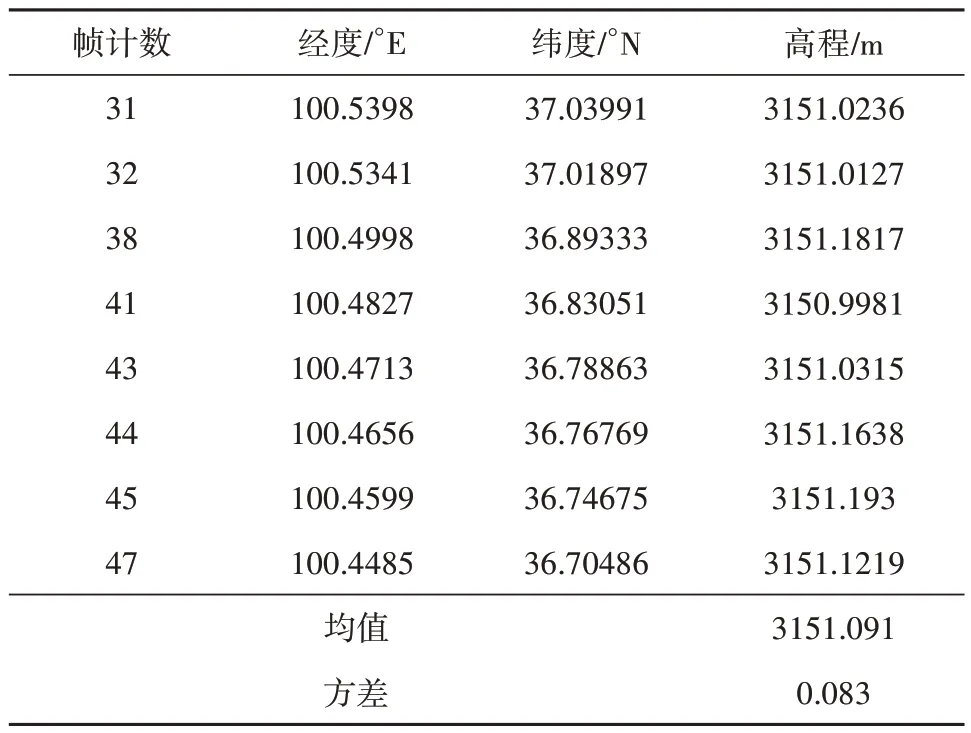
表8 6899轨湖面激光器2测高结果Table 8 The 6899th track beam 2 laser elevation precision compare to Qinghai Lake
3.5 野外定标场激光测高验证结果
本文选择6 月15 日到7 月19 日内蒙古呼伦贝尔激光外场定标实验捕获成功到的5 轨激光数据,利用解算出的定标参数,进行高程解算,与当日实测结果进行比对分析。
根据表9数据可知,不同时间不同轨道上在平地上的高程精度优于0.15 m。对于不同地形激光测高精度同时受到地形和卫星平面定位精度的影响。通过立体相机无控定位精度分析可知卫星平台的无控定位精度优于6.5 m,与不同时间不同轨道上的激光平面精度(6.8 m)基本吻合。分析坡度15°下高程精度约为1.75 m,主要误差来源为卫星定位偏差在大坡度上引起的高程误差。
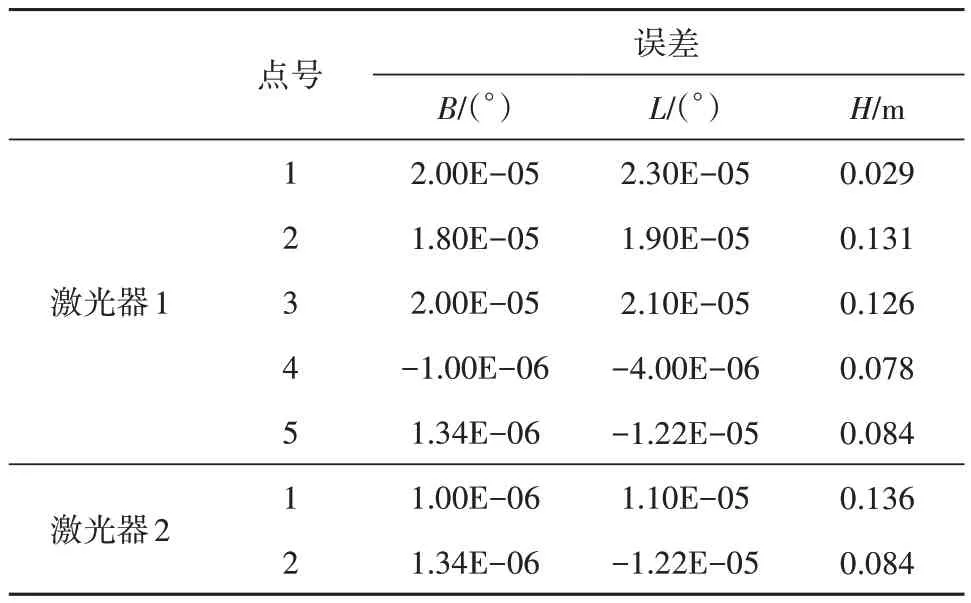
表9 激光测高精度结果Table 9 Height accuracy of laser altimetry
4 结论
本文针对第一颗国产全波形激光雷达——高分七号激光测高仪几何定位、波形数据处理和检校验证的问题,在已有星载激光雷达数据处理方法和检校验证方法的基础上,构建了针对高分七号卫星激光测高仪的严密几何定位模型,应用了测距补偿模型实现了基于地形匹配与红外探测器结合的激光测高仪指向角标定,最后提出了综合的测高精度验证方法。将这些方法成功应用于高分七号星载激光测高仪数据处理与数据精度验证,实现了星载大光斑全波形激光雷达数据的自主处理与验证,并得出了以下结论:
(1)激光器1 对应指向角误差约为0.15″,激光器2对应指向角误差约为0.38″;
(2)通过平静湖面测试证明激光测高数据处理精度高,稳定性好;
(3)经过地面靶标验证,激光器指向角误差修正后,激光测高在平地的测高误差小于0.15 m。
结果表明,本文提出的高分七号星载激光定位方法和精度验证方案,实现了国内第一颗星载全波形激光测高仪数据处理,处理后的数据精度高,可以满足后续高分七号科学研究和大规模业务化应用的要求。同时,本文形成的星载激光测高仪检校验证方案,可以用于未来国产激光载荷卫星的精度验证。由于后续激光测高卫星波束的增加和激光检校外场实验的限制,对于星载激光测高仪综合校验方案还需要进一步探索与完善。
猜你喜欢
军事文摘(2024年4期)2024-03-19 09:40:02
都市(2023年6期)2023-12-28 07:56:54
诗歌月刊(2023年1期)2023-03-22 14:06:24
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28 06:19:00
科学(2020年6期)2020-02-06 09:00:06
阅读(高年级)(2019年9期)2019-11-15 07:22:54
阅读与作文(小学高年级版)(2019年8期)2019-10-16 04:46:50
传媒评论(2017年8期)2017-11-08 01:47:36
光学精密工程(2016年5期)2016-11-07 09:06:14
工业设计(2016年4期)2016-05-04 04:00:27
