改进的十二扇区磁链判断方法的直接转矩控制
2023-06-09 04:13:14徐志佳宋景
电子制作 2023年8期
徐志佳,宋景
(贵阳学院 机械工程学院,贵州贵阳,550005)
0 引言
直接转矩控制(Direct Torque Control, DTC)的本质是在静止两相坐标系下直接控制异步电机的定子磁链和电磁转矩[1]。DTC 算法具有动态响应快、对干扰信号鲁棒性强等优点,但由于在低速区定子的电阻压降提升导致磁链波形畸变,开关频率不恒定等因素的影响,导致转矩、电流脉动大,从而限制了直接转矩控制的应用。
针对上述问题,国内外学者在确保动态响应快的前提下,提出了一系列的改进策略。上海大学宋文祥团队增加了延时补偿缓解和优化矢量选择器,抑制了由控制延时导致的电流纹波和转矩脉动[2]。文献[3]利用了智能算法将模糊控制和电压矢量占空比技术相结合,但增大了平均开关频率。文献[4]将弱磁升速理论与电压空间矢量调制的DTC 融合,拓展了电机的调速范围,可达到额定转速三倍以上的扩速效果,并在一定程度上减小了转矩脉动。文献[5]以七相感应电机为例,提出了一种新的结合占空比优化算法的时序策略来选择最优电压。文献[6]对定子磁链扇区进行了细分,通过预测控制选择最优电压矢量减小转矩脉动。文献[7]设计了根据定子磁链在两相坐标系上的分量设计了一种改进磁链位置判断方法的六区段DTC 调速系统,定子磁链观测和扇区判断直接影响电压空间矢量的有效选择,可简化算法,缩短控制周期。
本文以三相异步电动机为研究对象,直接采取定子磁链在两相坐标系下的投影设计了十二扇区位置判断策略,与六扇区的直接转矩控制进行仿真对比。
1 异步电机直接转矩控制策略
异步电动机直接转矩控制的原理框图如图1所示。3/2坐标变换为clark变换,详见式(1)和式(2)。通过定子α-β坐标系下的定子电压(u sα和usâ)和定子电流(i sα和isâ),通过式(3)、式(4)和式(5),可计算得到定子磁链在α-β坐标下的分量ψsα和ψsâ及电磁转矩Te。实际转速n与期望转速ñ 比较后在速度调节器作用下即可获取电磁转矩期望值Te*;磁链调节器和转矩调节器均采用施密特滞环控制器,分别获取磁链开关信号Qψ和转矩开关信号QT。根据定子磁链观测,确定磁链的扇区,最后选择正确的电压开关信号,从而达到直接控制转矩的目的。6个开关元件可以实现八种不同的开关组合形式。

图1 直接转矩控制原理框图
2 六扇区直接转矩控制
传统直接转矩控制一般是将定子磁链划分为6个扇区(如图2所示),传统磁链位置判断是通过定子磁链的幅值和角度来获取磁链位置,算法复杂,降低了控制器的性能。本实验首先通过电压模型法检测出定子三相电流,再根据α-β静止两相坐标系上的分量设计六扇区判断策略电磁转矩主要随磁通角的变化而变化,但实际上,控制过程的每个电压矢量都会影响定子磁通量的开关幅度和磁通角的大小。电压矢量会对磁链幅值以及磁通角引起的作用和影响,磁链控制的实现,是以应用两点式滞环调节器为基础的,转矩控制的实现,是以应用三点式滞环调节器为基础的。

图2
3 改进的十二扇区直接转矩控制
电磁转矩的变化主要是由于变化迅速快的起作用。 因此,在给定的时间间隔中,所选取的电压变量无法同时符合这两项前提,而使电磁转矩像预计那样改变。所以,通常直接转矩控制的六扇区磁链在部分状况下是不怎么精确的。因此,为了有效地抑制转矩脉动和电流脉动,本文将采用十二扇区来实现,定子磁链十二区间划分为如图2(b)所示的每个区间为30°的扇形区域。为了简化计算,提高执行结构的控制效率,本文提出一种改进的十二扇区位置判断表,如表1所示。
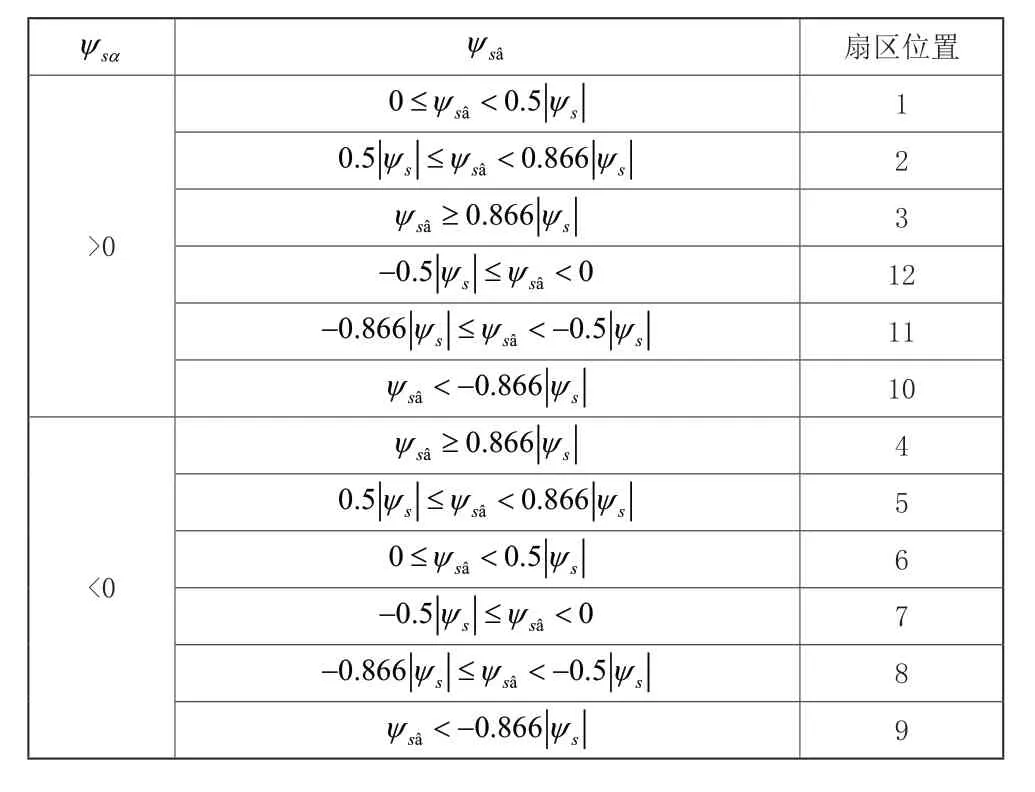
表1 改进的十二扇区位置判断表
在不同的扇区,应选择对应的电压空间矢量,即表2中十二扇区对应的电压矢量,确保磁链幅值和转矩的正确变化趋势。
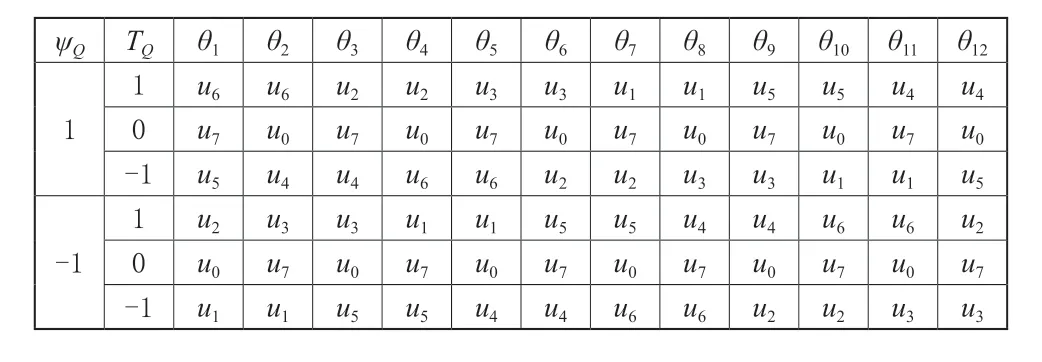
表2 十二扇区电压矢量表
4 仿真结果
该实验基于MATLAB R2018b/Simulink 平台,对传统直接转矩控制和改进的十二扇区位置判断方法的直接转矩控制进行了仿真建。三相异步电机的仿真参数见表3。

表3 三相异步电机的仿真参数
算法用固定步长的ode3 三阶龙格-库塔法,给定磁链幅值1.2Wb,采样时间设为1sµ,给定期望转速1000rad/s,给定负载启动时为30N.m,仿真时间为1s,在相同的环境和参数设置下,得到图3(a)~图7(b)所示的波形。
图3

图4

图6

图7
图3(a)和图3(b)分别为六扇区和十二扇区的DTC 近似圆形的磁链波形,通过比较可以明显看出,十二扇区的磁链波形毛刺更少更光滑,更接近于圆形。
图4(a)和图4(b)分别为六扇区和十二扇区的DTC 定子A 相电流波形,可以直观地看出十二扇区DTC的定子电流的毛刺更小,可以定性的分析得出结论:十二扇区DTC的定子电流谐波含量与幅值畸变较小。
图5(a)和图5(b)分别为六扇区和十二扇区的DTC 定子相电流FFT 分析。六扇区DTC 总谐波畸变率THD 为33.43%,而十二扇区DTC 总谐波畸变率THD 为13.14%,通过定量计算验证了“十二扇区DTC的定子电流谐波含量与幅值畸变较小”这一结论。
图6(a)和图6(b)分别为六扇区和十二扇区的转速波形,六扇区DTC 在电机启动0.35s 左右达到期望转速值,而十二扇区DTC 在电机启动0.03s 左右即可到达期望转速值,说明十二扇区的DTC的速度响应更快。
图7(a)和图7(b)分别为六扇区和十二扇区的电磁转矩,十二扇区的DTC的电磁转矩能够快速地响应速度变化,在启动时可提供更大的启动转矩,并且电磁脉动明显减小。
5 结束语
本文以三相异步电机为研究对象,提出一种改进的十二扇区的磁链位置判断方法的直接转矩控制,通过与六扇区的直接转矩控制仿真结果对比,改进磁链方法的十二扇区DTC 策略不仅减小了计算量,改进方法可缓解磁链和电磁转矩脉动,提高系统的动态响应性能,且把定子电流总谐波畸变率THD 从33.43%降至13.14%。
猜你喜欢
家教世界(2023年25期)2023-10-09 02:11:56
中国特种设备安全(2022年3期)2022-07-08 02:21:56
南北桥(2022年2期)2022-05-31 04:28:07
阅读(低年级)(2018年5期)2018-05-14 15:47:44
电脑知识与技术·经验技巧(2017年9期)2018-02-24 19:55:20
西南交通大学学报(2016年4期)2016-06-15 20:29:36
电测与仪表(2016年10期)2016-04-12 00:26:38
计算机技术与发展(2016年10期)2016-02-27 00:44:08
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20