
2023款路虎揽胜底盘控制新技术(一)
2023-06-07 13:43河南李韬
汽车维修与保养 2023年3期
◆文/河南 李韬
一、路虎揽胜悬架主动稳定控制系统
1.概述
路虎揽胜和揽胜运动车型悬架系统采用了比较先进的控制系统,包括可变阻尼减振器、空气悬架、主动稳定控制等。这些先进技术成就了路虎不但有强大的越野性能,还使其具有优异的舒适性能。在2023款新揽胜上,这些系统又进行了升级,有些升级变化还是很大的。本文以路虎最高端车辆路虎揽胜为例,对路虎底盘控制技术加以介绍,揽胜运动车型与之类似,也可以参考。因为悬架采用主动稳定控制系统的车型极少,我们对这一技术的介绍较为详细,包括了2023新款揽胜和之前年款的对比介绍。
2.主动稳定控制系统的作用
车辆转弯时会产生离心力,离心力将车辆的弹簧承载重量转移到转角的外侧。图1显示的是正在通过右转弯道的车辆。因此,左悬架(1)受压,右悬架(2)扩展。此时车身失去平衡,它以与悬架高度变化成比例的角度(3)“侧倾”。同时乘客感觉不舒服,车辆的转向几何结构也受到影响。车轮外倾角和轮胎负载将随车辆高度变更而改变。外侧轮胎侧向力增加(4),内侧车轮的偏离角也将加大。要补偿这种情况,需要更大的转向输入。如果轮胎超载,车辆将转向不足或转向过度。车身侧倾在一定程度上被悬架的刚度系数控制,但如果过于“刚性”,行驶质量将受到影响。要抑制这种情况,前后悬架上会安装平衡杆,以在急转弯时帮助防止车身过度侧倾。平衡杆的作用在于让悬架两侧之间保持平衡。该平衡杆是一根实心弹簧钢杆,使用两个衬套连接到底盘。钢杆两端通过连杆连接到其各自的悬架臂,可随悬架偏移而移动。车身侧倾时,悬架一侧压缩,另一侧伸展。这会向平衡杆两端施加作用力(一侧向上,另一侧向下)。两端的作用力是相反的,因为该力会尝试扭转平衡杆。平衡杆的扭转强度将抵抗扭转运动,从而减少车身侧倾量。较软的平衡杆将提供舒适的行驶质量,但转弯控制能力较差。较硬的平衡杆又会影响行驶舒适性。通过平衡杆厚度和连杆长度适应并补偿它所安装的车辆,在整个驾驶范围内提供折中办法。
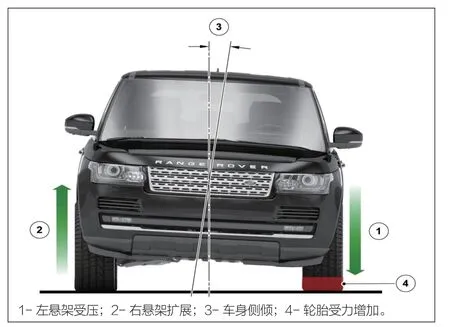
图1 车辆转向时的姿态
二、2022款路虎揽胜主动稳定控制系统
1.部件组成
主动稳定控制系统也称为动态响应系统或主动侧翻控制,采用主动平衡杆系统提升了车辆的操纵和驾驶性能,在普通道路和越野驾驶情况下都启用。转弯时动态响应系统工作,以保持车身姿态,大幅降低了转向时的车身侧倾。2022款及之前的路虎揽胜主动稳定控制系统是一个电子控制的液压系统。主动平衡杆通过将转向力控制在最大0.4g来减少车身侧倾。从0.4g起,车身侧倾就逐渐增加,但明显比“被动”系统低。如果检测到越野条件,则车辆以40km/h或更小的速度行驶,控制模块将减小侧倾补偿。在大于11°的斜坡上,系统将以低速转换至“锁定杆”状态。2022款之前的路虎车型使用两个不同的系统,早期单通道主动侧翻控制系统(ARC)和后期双通道系统动态响应系统(DRS)。双通道系统的前后控制是独立的。
动态响应系统部件组成如图2所示,它是一个双通道电子控制液压平衡杆系统。动态响应系统使用两个加速度传感器检测车辆横向加速度以及转向角传感器和车速的输入,以向动态响应控制模块提供数据。动态响应控制模块然后操作阀块中的电磁阀,电磁阀向前后平衡杆上安装的执行器施加液压。向执行器施加液压给平衡杆施加一定量的反向“扭力”,以抵消转弯力并减少车身侧翻。执行器为双向执行器。液压根据需要可施加到活塞的任一侧,在动态响应控制模块内形成计算好的横向加速度,它与阻止车身侧翻所需的回复力对应。

图2 动态响应系统部件组成
2.油泵
液压泵由辅助传动皮带以约1.7 倍的曲轴速度驱动。如图3 所示,油泵为径向活塞型,有8 个活塞,偏心凸轮旋转时操控活塞,产生持续油液流。泵的工作压力为180bar(1bar=100kPa)。
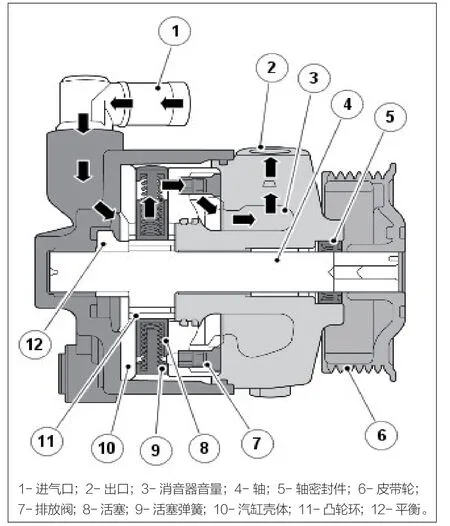
图3 油泵
3.动态响应系统阀块
阀块如图4所示,位于车身左侧门槛下部。阀块通过2个电磁阀操纵的比例方向控制阀来控制每个执行器的液压方向。电磁阀操作的压力控制阀调节系统所需压力。所有电磁阀由从动态响应控制模块接收到的信号进行控制。5个压力传感器监测压力控制阀(PCV)产生的压力和单个执行器管道内的压力。阀块还包含一个安全控制阀,当车辆静止时,其会关闭;车辆行驶时则打开。除安全控制阀之外,所有电磁阀都不可维修,如果发生故障,则需更换单个阀总成。压力传感器旋入阀块中,由锥形座密封,可进行维修。压力传感器测量液压并向动态响应控制模块返回信号。阀块还包含一个减压阀,可在PCV卡滞或PCV电源对蓄电池电压短路时为系统提供保护。

图4 阀块
4.控制油路
控制油路如图5所示,阀块包含4个电磁阀操作的阀门。压力控制阀(PCV)(12)调节系统所需的工作压力。安全控制阀(SCV)(8)将平衡杆执行器(6和7)与系统隔离。两个比例方向控制阀(PCV阀4和9)引导并调节通往平衡杆执行器的机油压力大小。这4个电磁阀都通过响应控制模块发出的信号进行控制。当发动机运转且车辆静止时,泵将会转动。因此,油液将会流动,压力将会上升。PCV(12)将会打开,因为阀块总成内无需高工作压力,所以液压油从泵流出,通过通道流经阀块,然后回流到储液罐。压力传感器(3)监视此通道中的压力。此时无需调节平衡杆执行器控制阀(4和9),因此两个PCV均处于中间位置(空挡状态),SCV(8)关闭。这实际上以液压方式隔离了执行器和阀块,平衡杆在锁定状态工作(默认安全模式)。SCV关闭后,内部通道允许机油在各执行器的同侧之间流通。前后执行器的两个活塞侧已连接,前后执行器的两个连杆侧也已连接,作用于活塞各侧的机油压力相等。

图5 控制油路
5.主动式平衡杆
前主动式平衡杆如图6所示,后主动式平衡杆如图7所示,执行器如图8所示。执行器的两个液压接头用于连接阀块的液压管,用于向执行器活塞两端提供液压油流。每个执行器都有一个活塞,活塞连在滚珠丝杠里侧,通过花键连接至平衡杆的一半。滚珠丝杠的外部焊接在壳体上,壳体连至平衡杆的另一半。执行器分成两侧:活塞侧(左侧悬架)和连杆侧(右侧悬架)。随着向活塞的一侧或另一侧施加压力,球头螺母将施加给活塞的线性力转换成平衡杆两半之间的旋转扭矩。因此,当杆的一侧向上旋转时,另一侧就会向下旋转。扭转量由施加到执行器活塞的液压成比例控制。

图6 前主动式平衡杆

图7 后主动式平衡杆
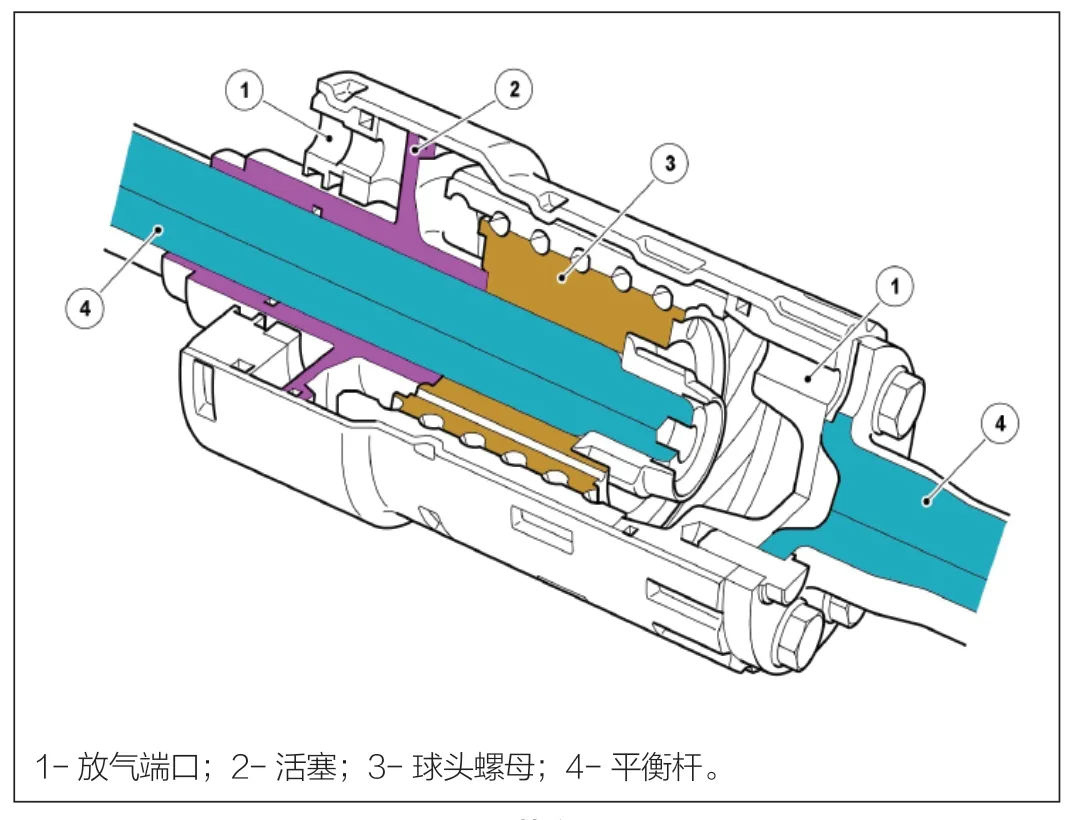
图8 执行器
直行时,执行器两侧的机油压力保持平衡。车辆进入弯道,控制模块持续接收各传感器传来的有关车辆驾驶状况的数据。检测到横向加速度后,控制模块会计算所需的工作压力,该压力需要施加到平衡杆执行器上,以对抗侧向力并保持车辆姿态(依照校准的工况图,最多0.4g)。控制模块通过PCV调节通道中的限制调节工作压力。根据测量的侧向力方向,控制模块将激活前后PCV阀,以向各执行器的活塞侧或连杆侧供应高压机油。每个PCV阀都含有两个作用于单个滑阀的电磁阀线圈。一个用于调节执行器活塞侧的压力,另一个用于调节执行器连杆侧的压力。系统可准确地单独调节前后执行器任一侧的机油压力。根据动态条件,前后的压力可能不同,例如转向不足或转向过度情况。随着执行器活塞的一侧被加压,会释放另一侧,以使平衡杆扭转,向悬架一侧施加更大张力,向另一侧施加更小张力,大张力侧会以液压方式提升车辆(悬架臂被向下推-悬架弹簧扩展)。
6.电控部件
(1)加速度传感器。系统使用两个加速度传感器:一个上和一个下。两个传感器结构相同。下加速度传感器固定在车辆地板下面,左侧内部门槛面板上,前车门下方。上加速度传感器固定在车身天窗面板支架上,挡风玻璃顶部的中心位置。下加速度传感器是用来测量横向加速度的主传感器,以控制侧翻。上加速度传感器与下加速度传感器结合使用进行侧翻校正和故障检测。每个加速度计都是一个自适应加速度传感器,并且以动态响应控制模块输出的5V电源进行工作。上下加速度传感器都能够测量±1.11g范围内的加速度,并向动态响应控制模块返回0.5~4.5V之间的输出。
(2)控制模块和控制说明。控制模块位于驾驶员侧“A”柱上,仪表组下面。动态响应系统控制框图如图9所示。控制模块在高速动力HS PT CAN总线上,转向角传感器的信号在高速底盘HS CH CAN总线传播,在网关GWM转换后,到达HS PT CAN总线,传输到动态响应控制模块。发动机转速信号通过HS PT CAN总线从ECM传输至动态响应控制模块。行驶速度通过HS PT CAN从ABS模块传输至动态响应控制模块。动态响应控制模块提供至压力控制阀以及阀块内的比例方向控制阀的控制电流。输送的电流大小由上下加速度传感器、行驶速度、转向角等发出的许多输入信号决定。比例方向控制阀可按控制模块提供的电流比例控制向执行器输送的液压,而液压水平则由控制器模块中的校准装置来确定。动态响应控制模块为安全阀提供电流,使其可在车辆行驶时,在正常操作下打开。阀组中的压力传感器从控制模块接收5V电源。转换器测量0~200bar之间的液压,并且根据液压向控制模块返回线性输出电压。
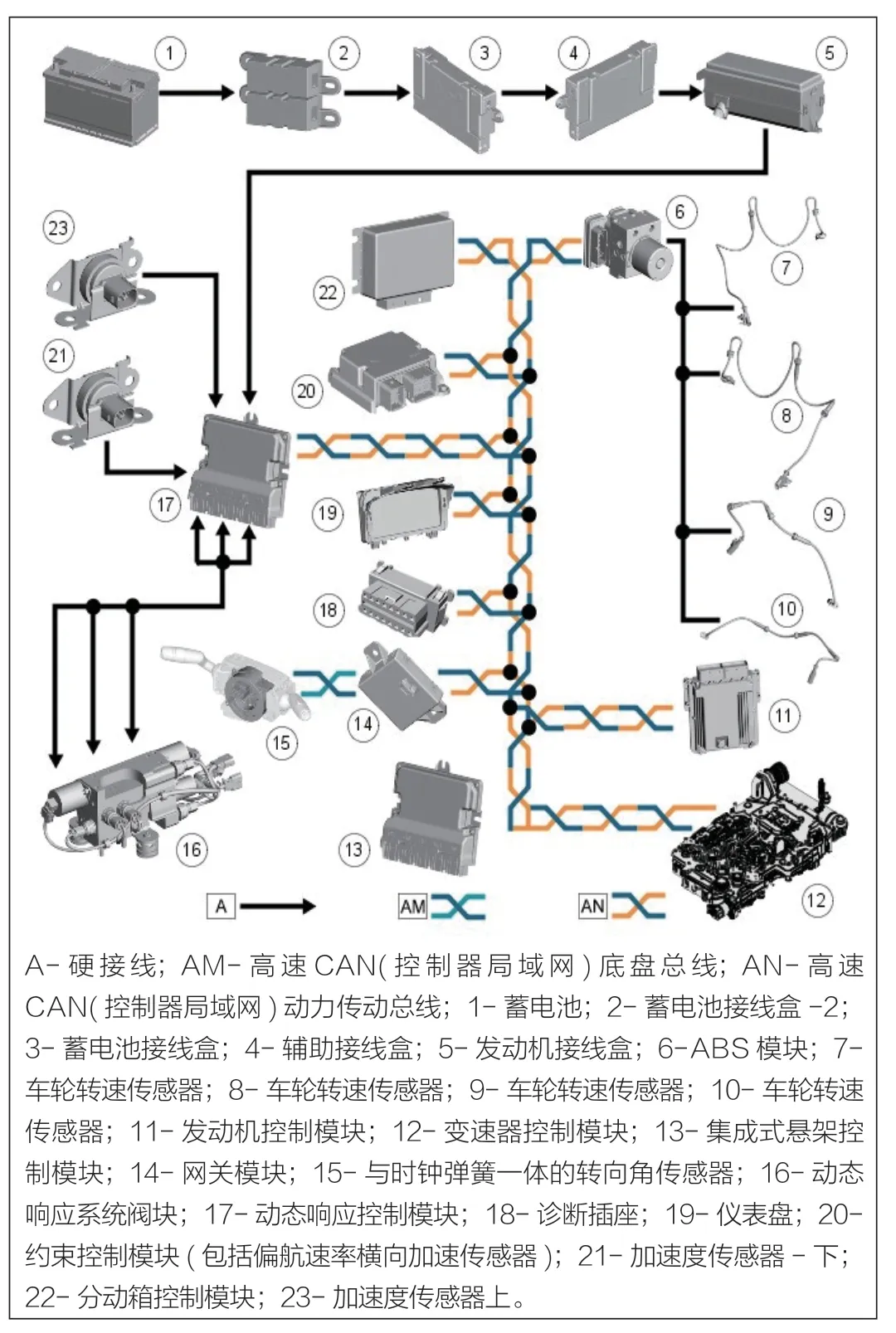
图9 动态响应系统控制框图
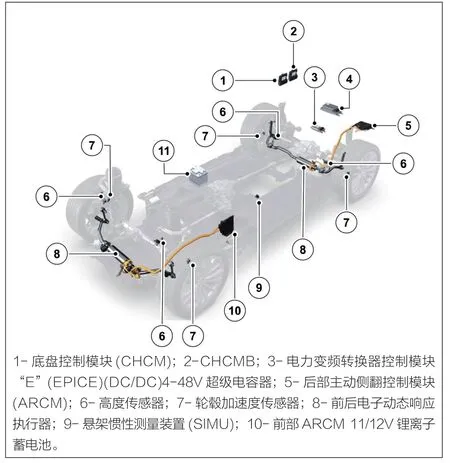
图1048V电子动态响应系统部件
(3)故障说明。检测到系统故障时,控制模块通过CAN总线发布一条消息,此消息由仪表组接收。然后,仪表组合点亮动态响应系统警告指示灯并显示提示。控制模块在两种状态下失效:“锁定杆”和“减少操作”。“锁定杆”情况即泵流直接引过阀组并返回储液罐,安全阀关闭,堵住执行器中的油液。稳定杆与传统稳定杆操作相似。“减少操作”情况即系统能工作,但接收不到其中一个输入信号,因此系统性能不是最佳。在对系统进行维修或维护操作之后,必须使用Land Rover认可的诊断系统执行排气程序和液压系统响应测试,以确认是否已重新建立正确的操作。
三、2023款新揽胜电子动态响应系统
1.部件组成
2023款新揽胜采用48V电子动态响应系统取代了原来的液压动态响应系统,系统的作用与液压系统类似,该系统可减少或完全消除车辆侧倾。使用电子动态响应系统可减少二氧化碳排放,因为它以按需供电的原则运行,并因此可减少发动机的寄生电流消耗。前后执行器均由3相直流无刷电机驱动(±7.5N.m)提供。它们由前后主动侧翻控制模块(ARCM)驱动。通过3级行星齿轮组以200:1的比例传输电机驱动力。这大大增加了电机至横向稳定杆的扭矩输出(高达1400N.m)。48V电子动态响应系统部件组成如图10所示,主动侧翻控制模块(ARCM)位于轮拱内衬上方。通过将ARCM与底盘控制模块B(CHCMB)分开,可改善热管理。执行器和ARCM中都有温度传感器。如果发生温度过高,系统将会降低额定功率。电子动态响应系统使用CHCMB。
猜你喜欢
测控技术(2018年12期)2018-11-25
石油化工自动化(2018年5期)2018-11-14
制造技术与机床(2017年9期)2017-11-27
北京汽车(2016年6期)2016-10-13
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
设备管理与维修(2016年5期)2016-03-16
工程建设与设计(2016年4期)2016-02-27
现代制造技术与装备(2015年4期)2015-12-23
汽车维护与修理(2014年10期)2014-02-28
