基于车辆运行数据的手动驾驶技术评价应用
2023-06-05 07:04李寿锋
运输经理世界 2023年7期
李寿锋
(厦门轨道建设发展集团有限公司,福建厦门 361000)
0 引言
地铁运营是一个复杂联动系统的统一运作,具有发车频率高、运营密度大和运营持续时间长的特性[1]。地铁的发展不仅对硬件设施设备提出了更高的标准,对电客车司机的操作规范也提出了更严格的要求[2]。现阶段,对电客车司机的培养和评价主要通过计算机模拟仿真技术和传统手动驾驶评价。实际上,计算机模拟仿真并不能真实反映实际驾驶工作;传统手动驾驶评价存在人力成本高、主观判断强的缺点。考虑到数据是智能交通的基础,通过地铁车辆ERM 运行数据分析,开发手动驾驶技术评价程序,对电客车司机的手动驾驶技术进行充分、快速的评价,让操作行为更加规范。
1 手动驾驶技术评价标准分析
1.1 评价维度分析
按照行业规范要求,电客车司机手动驾驶技术评价主要体现在标准化作业执行、精准停车、运行舒适度和运行准点率四个维度。
1.1.1 标准化作业执行,司机在驾驶列车时,应严格执行标准化作业流程,确认行车凭证及“眼看、手指、口呼”的呼唤应答制度。
1.1.2 精准停车,要求司机对标停车时能够精准停车作业,列车在站停稳后,应保证停车误差小于50cm。
1.1.3 运行舒适度,在列车运行过程中,为保证乘客无不适感,要求列车加速、制动和巡航过程中应保证平稳运行。
1.1.4 运行准点率,为乘客提供安全、准点、便捷的服务,对列车运行过程的准点率要求严格,不允许出现列车晚点、早点。
1.2 评价方式分析
综合上述手动驾驶技术评价的四个维度,传统手动驾驶主要通过评价人员携带测量尺、列车冲动仪、评价表等器具,以现场添乘作业的方式进行手动驾驶技术评价,存在人力成本高、主观判断强、覆盖面小的缺点。
2 地铁车辆ERM 运行数据分析
2.1 地铁车辆ERM 运行数据数值研究
随着地铁车辆ERM 运行数据的积累,对运行数据进行分析,地铁设备的运营管理和维护更加精益化[3]。
通过对同一区段不同电客车司机的驾驶水平、驾驶模式(AMC/MCS)进行测试,下载地铁车辆ERM运行数据进行对比,结合手动驾驶技术评价维度提取有效信息,包括时间、ATO 模式状态、牵引指令反馈、制动指令反馈、牵引制动参考值、列车速度、当前站站台ID(见表1)。
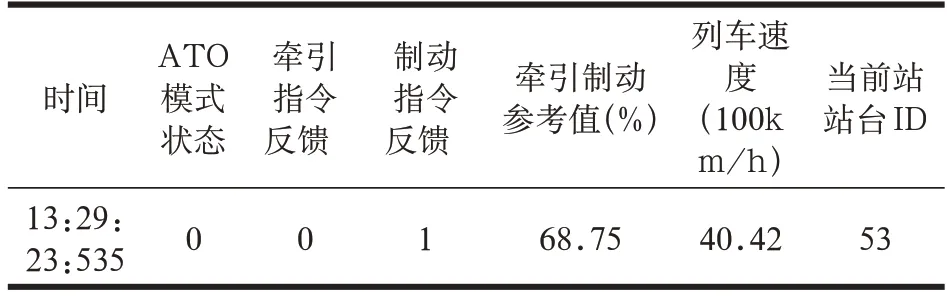
表1 地铁车辆ERM 运行数据
2.1.1 时间数值分析,原地铁车辆ERM 运行数据中时间单位为毫秒级,需将时间粒度转换为秒级,并以1s 为单位筛选相应数据。
2.1.2 ATO 模式数值分析,ATO 模式状态信息体现列车是否处在ATO 驾驶模式,“0”为手动驾驶模式,“1”为AMC驾驶模式。
2.1.3 牵引/制动指令反馈数值分析,根据牵引/制动指令反馈状态和牵引/制动参考值体现列车当前牵引/制动输出值,即在手动驾驶模式下为主控手柄牵引/制动级位。
2.1.4 列车速度值分析,列车速度为当前列车的实际运行速度,数值单位为100km/h。
2.1.5 当前站站台ID 值分析,当前站站台ID 为体现列车所处站台位置,绘制全线各站站台ID 对应表。
2.2 地铁车辆运行数据曲线研究
根据手动驾驶技术最优的电客车司机的车辆运行数据进行分析转换,绘制MCS 手动驾驶标准曲线,并与不同电客车司机手动驾驶测试的车辆数据曲线进行比对,以1 号线镇海路—中山公园上行为例(见图1)。
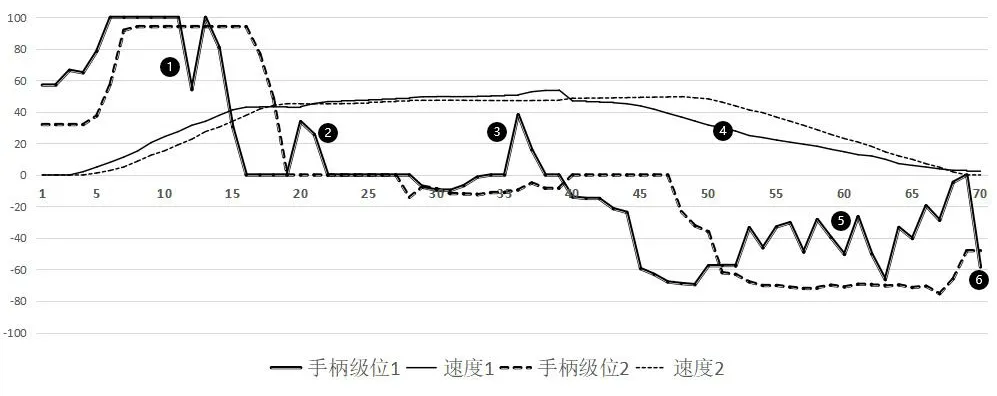
图1 手动驾驶标准曲线差异比对
通过与标准驾驶曲线差异比对,结合手动驾驶技术评价维度进行分析评价,存在如下数据差异:
其一,运行准点率方面。测试司机驾驶曲线与标准驾驶曲线单站延误2s;测试司机比照标准驾驶曲线在进站对标前速度慢15km/h(标记①)。
其二,运行舒适度方面。测试司机在区间运行、进站对标时,在短时间内反复变动主控手柄级位(标记①、②、③、⑤);测试司机在对标停车前2s 内,施加制动力超过95%(标记⑥)。
其三,精准停车方面。测试司机在对标过程中未产生速度值为“0”后,再进行二次启动情况。
3 手动驾驶技术评价程序开发
3.1 程序框架
基于地铁车辆ERM 运行数据的手动驾驶技术评价标准表,为实现手动驾驶技术评价批处理功能,以1号线为例,搭建手动驾驶技术评价PC 端应用程序,实现一键导入地铁车辆ERM 运行数据。软件能快速通过司机手动驾驶的运行准点率、运行舒适度以及精准停车等评价维度,计算司机手动驾驶技术的评价分值。
程序功能可实现:一键导入地铁车辆ERM 运行数据功能,评价站点区间功能,快速显示评价分值,显示评价扣分及失格项。
为实现一键导入地铁车辆ERM 运行数据功能,程序界面设计5 个数据输入接口,分别为:日期、车次、司机姓名、车组号、导入数据。程序操作简便、层次清晰、界面简洁。
3.2 程序评价策略
比照《运营时刻表》站点间标准用时数据,以A 站启动至B 站站台作业结束后动车为基准,用时多则扣分,时间单位精确至秒,累计延误超过120s 为失格项,最终绘制各站点之间标准用时对应表。
3.2.1 精准度评价策略,当发生欠标时,列车停车后不开门,方向为向前继续运行,车辆数据判定表达为:当前站台ID 不为“0”,列车速度降为“0”,至列车再次启动期间,列车综合方向向前持续为“1”,并且,门关好状态持续为“1”。
当发生冲标时,列车停车后不开门,方向为向后退行,车辆数据判定表达为:当前站台ID 不为“0”,列车速度降为“0”,至列车再次启动期间,列车综合方向向后为“1”,且所有门关好状态持续为“1”。
当未发生相关行车事件时,区间异常停车判定为手动驾驶超速紧制,车辆数据判定表达为:列车速度降为“0”,列车速度与站台ID 同时为“0”,且所有门关好状态持续为“1”。
3.2.2 运行舒适度评价策略,手动驾驶技术运行舒适度评价通常为列车纵向振动加速度,即列车启动、减速或紧急制动时产生的振动。在《铁路旅客列车纵向动力学试验方法与评定指标》(TB/T 2370—1993)中,列车纵向加速度和减速度的评定指标为“列车启动、调速及常用制动时,纵向平均加或减速度的绝对值应不超过0.08g,列车紧急制动时的平均减速度应不超过0.12g,但在初速为40km/h 以下时允许不超过0.14g,列车紧急制动时的最大纵向减速度不应超过1.0g”。根据地铁车辆ERM 运行数据中牵引指令反馈、制动指令反馈、牵引制动参考值、列车速度等有效数据研究,提出以主控手柄级位、加速度以及加速度变化率三种运行舒适度评价策略。
为进一步验证评价策略的可靠性,利用末班车后回场空载列车开展手动驾驶测试,以不同的级位(100%、80%、60%、50%、30%)牵引/制动操纵列车,测试人员模拟站立乘客体验客室内对运行舒适度的直观评价,并记录相应的时间点。运行舒适度直观评价划分三级:运行舒适度一般(I 级)表现为明显有顿挫感;运行舒适度较差(Ⅱ级)表现为站立困难,站立人员向前/向后挪动;运行舒适度极差(Ⅲ级)表现为站立人员有明显摔倒趋势。
通过地铁车辆ERM 运行数据分析,对主控手柄级位与运行舒适度测试值进行对比,得出结论:主控手柄级位仅代表牵引/制动力输出参考值,与运行舒适度测试值正相关性不明显。因此,主控手柄级位参考值不适用于运行舒适度评价策略。
通过地铁车辆ERM 运行数据分析,按照每秒加速度变化值进行计算,对列车加速度与运行舒适度测试值进行对比,得出结论:列车加速度仅为速度变化率,具有一定参考意义,但与运行舒适度测试值同样未呈正相关。因此,列车加速度参考值不适用于运行舒适度评价策略。
3.2.3 加速度变化率评价策略,通过地铁车辆ERM 运行数据分析,按照每秒加速度变化值进行计算,对加速度变化率与运行舒适度测试值进行对比,结果如图2 所示。
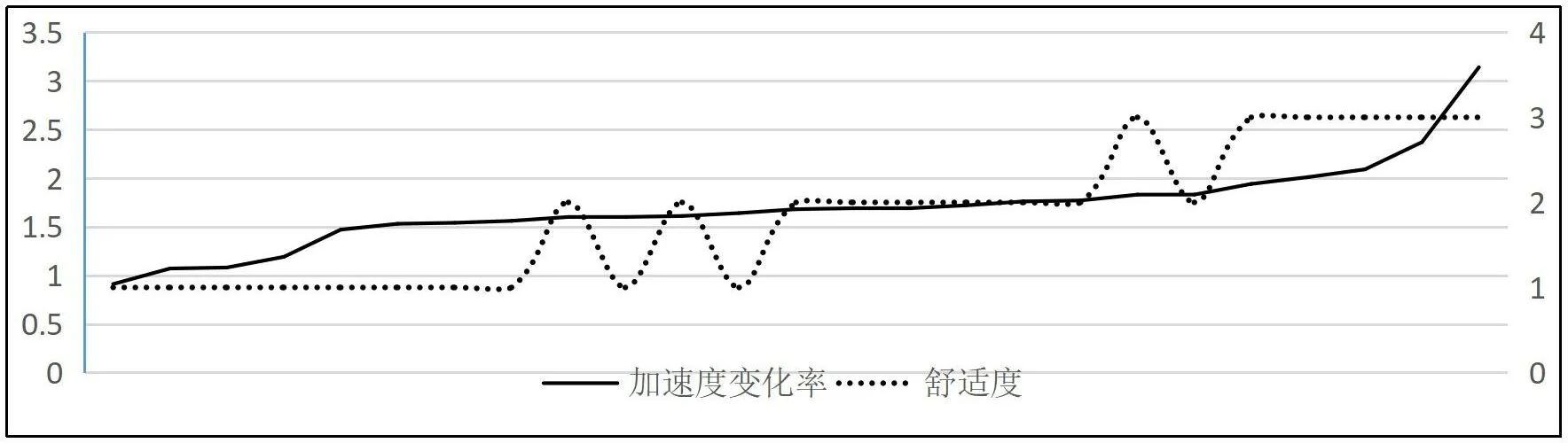
图2 加速度变化率与运行舒适度曲线对比
根据数据对比分析发现,加速度变化率与运行舒适度测试值基本呈正相关,通过试验数据,运行舒适度评价与加速度变化率绝对值结果如下:冲动I 级,在0.91~1.76m/s3;冲动Ⅱ级,在1.56~2.01m/s3;冲动Ⅲ级,在1.54~3.14m/s3。具体运行舒适度评价取值仍需进一步分析,再次采样1 号线手动驾驶测试值,当加速度变化率绝对值大于0.90m/s3时,加速度变化率与运行舒适度评价关系见表1。
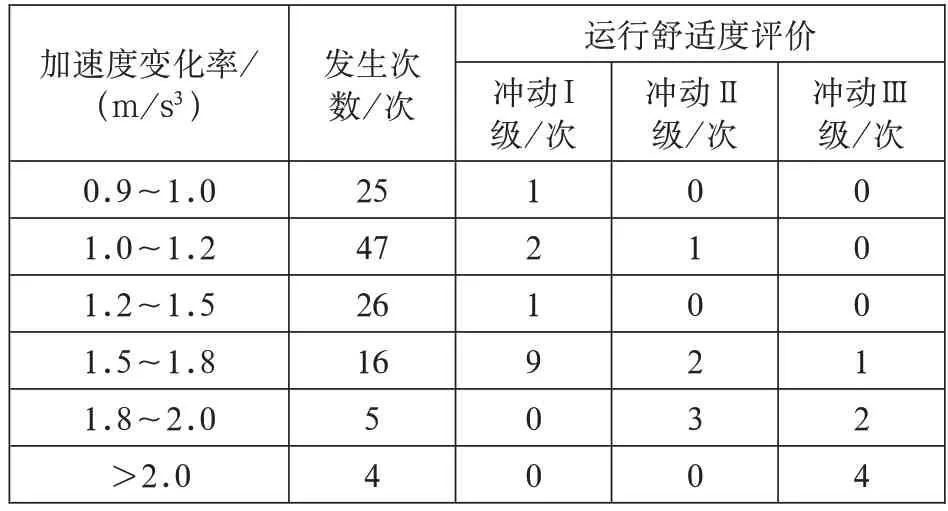
表1 加速度变化率与运行舒适度评价关系
通过进一步的数据分析,加速度变化率在0.9~1.5m/s3时,共发生98 次,运行舒适度有感评价共5 次,其中冲动I 级评价4 次,冲动Ⅱ级评价1 次,基本可排除人体主观运行舒适度评价产生的误差。因此,当加速度变化率小于1.5m/s3时,判定为正常允许范围。当加速度变化率在1.5~1.8m/s3时,共发生了16 次,运行舒适度的有感评价共12 次,其中冲动I 级评价9 次,冲动Ⅱ级评价2 次,冲动Ⅲ级评价1 次。因此,当加速度变化率在1.5~1.8m/s3时,判定为冲动I 级,运行舒适度表现为明显有顿挫感。
当加速度变化率在1.8~2.0m/s3时,共发生5 次,运行舒适度有感评价共5 次,其中冲动I 级评价0 次,冲动Ⅱ级评价3 次,冲动Ⅲ级评价2 次。因此,当加速度变化率在1.8~2.0m/s3时,判定为冲动Ⅱ级,运行舒适度表现为站立困难,站立人员向前/向后挪动。
当加速度变化率大于2.0m/s3时,共发生4 次,运行舒适度有感评价共4 次,其中冲动I 级、冲动Ⅱ级均为0 次,冲动Ⅲ级评价4 次。因此,当加速度变化率大于2.0m/s3时判定为冲动Ⅲ级,运行舒适度极差,表现为站立人员有明显摔倒趋势。
3.3 程序评价标准
按照上述列车位置识别、运行准点率评价、精准停车评价及运行舒适度评价策略,比照传统评价标准,以100 分为基础分值,随机选取1 名手动驾驶技术较优的电客车司机的地铁车辆运行数据进行试评价。
经试评价结果,手动驾驶技术较优的电客车司机评分仅为56 分,评价结果较低。结果表明,传统评价标准不适用于基于地铁车辆ERM 运行数据的手动驾驶技术评价标准,需对评价标准进行调整。以较优电客车司机评价不低于80 分为基准,对运行舒适度、运行准点率、精准停车三个评价维度考评分值调整后多次测试,确定基于地铁车辆ERM 运行数据的手动驾驶技术评价标准表如下:
3.3.1 运行舒适度,平稳性等级为I 级,每次-0.1分;平稳性等级为Ⅱ级,每次-0.2 分;平稳性等级为Ⅲ级,每次-0.3 分。
3.3.2 运行准点率,比照标准时间累计,每增加1s 对应扣0.1 分;比照标准时间累计≥120s,否决项。
3.3.3 精准停车,进站对标过程中产生欠标、二次启动的,每次-3 分;进站对标过程中冲标、退行的,每次-3 分;区间运行中产生紧急制动停车的,否决项。按照基于地铁车辆ERM 运行数据的列车位置识别、运行准点率评价、精准停车评价、运行舒适度评价策略以及评价标准,对比原有的人工评价方式,效率由原来的每人20min 压缩到1min 以内,极大提高了工作效率。
4 结语
电客车司机为乘客出行提供服务,手动驾驶技术是保障列车正点率、运行图兑现率以及乘客乘坐体验的基础。通过地铁车辆ERM 运行数据,研究运行准点率评价、精准停车评价、运行舒适度评价策略,开发手动驾驶技术评价程序。建立客观、高效、全面的手动驾驶技术评价机制,克服了传统手动驾驶评价人力成本高、主观判断强、覆盖面小的缺点,达到了智能化,提升工作效率的目的。
猜你喜欢
湖南电力(2021年4期)2021-11-05
纺织科学研究(2021年9期)2021-10-14
铁道通信信号(2020年1期)2020-09-21
初中生世界·九年级(2020年9期)2020-09-21
浙江工业大学学报(2017年5期)2018-01-22
小学生导刊(2017年17期)2017-05-17
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
电测与仪表(2016年14期)2016-04-11