
一种水下无人航行器水声遥控方法研究*
2023-06-05 00:49苏军
舰船电子工程 2023年2期
苏 军
(91388部队94分队 湛江 524022)
1 引言
随着水下无人航行器(Unmanned Underwater Vehicle,UUV)及相关技术的发展,UUV 通过搭载任务单元越来越多的应用于水下地形探测、侦察搜索监视、管线巡视检测等领域。由于受自身感知和自主决策能力限制,UUV 在水下长期航行时,外界的信息支持和人为干预就显得十分必要,可极大提高UUV执行任务的效率[1~2]。
目前,对水下航行器水声遥控一般采用多元频移键控(MFSK)、扩频通信等技术。MFSK 技术实现简单,可以采用非相干检测技术,但对多普勒频移较为敏感,在航行器快速机动时,通信距离和误码性能较差;扩频通信一般采用伪随机码对信息进行调制,具有较强的抗干扰能力,但接收端需保持严格时间同步,增加了较大开销,对能量受限的UUV来说显得较为突出。
Chirp 扩频(CSS)是利用其频率在整个带宽上的线性变化的正弦脉冲信号来传输信息,不需要伪随机序列扩频,也不需要严格时间同步,一般用于低速、低功耗的雷达和水声通信系统中。双曲调频信号(HFM)相对于Chirp 信号(LFM),具有严格意义上的多普勒不变性,且相关检测旁瓣较小,更适用于相对运动的通信系统中[3~4]。
文章针对水下航行器遥控通信问题,采用双曲调频信号(HFM)扩频调制方法,其本身即作为通信前导信号,用于符号同步、信道估计等,同时也可以携带数据信息,实现对水下航行器的遥控通信。
2 HFM信号特性分析
线性调频信号(Linear Frequency Modulation,LFM)是声呐常用信号,其瞬时频率呈线性变化,具有产生简单、近似多普勒不变性等优点,但其并不是严格的多普勒不敏感,其匹配滤波后的旁瓣较大。而双曲调频信号HFM 则正好弥补了这个不足,双曲调频信号的带通形式表示为[5~6]
式中f1为信号的起始频率;f2为信号的截止频率;T为信号时长。与LFM 不同,HFM 信号瞬时频率不呈线性增长,而是以双曲线的形式增长。其瞬时频率可表示为
由式(2)可以看出,fs(0)=f1,fs(T)=f2。瞬时频率在起始频率f1和截止频率f2之间,连续单调,且服从双曲分布。
假设HFM 信号经过多途信道后的多普勒扩展因子为a,那么接收端的HFM 信号瞬时频率可以表示为
可以推导出,当Δt0满足:
下面等式成立:
由式(5)得出,对于HFM 信号,其多普勒扩展可等效于频率调制函数在时间上的平移,接收信号的调制特性保持不变,因此,HFM 信号具有严格的多普勒不变性[7~8]。
当选用起始频率6kHz,截止频率为9 kHz,时长0.02s 的HFM 信号,其时域波形、时频图和模糊度函数图如图1、2 所示。在目标相对运动速度为0 m/s、3 m/s、5m/s、10 m/s 时的相关检测结果如图3所示。

图1 HFM信号时域波形和时频图
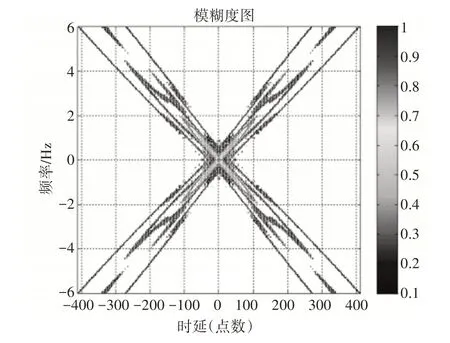
图2 HFM信号模糊度图
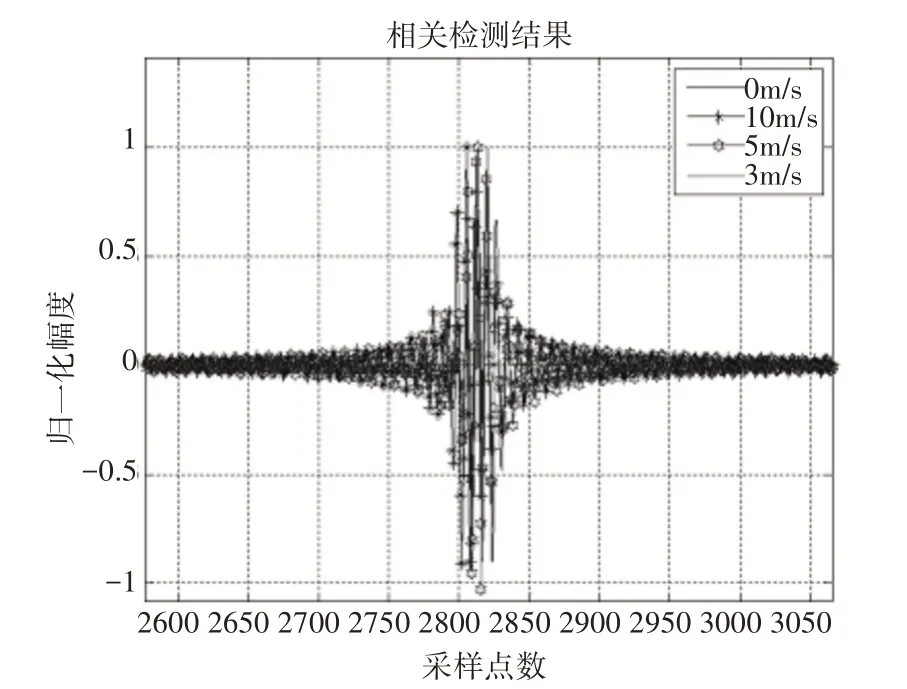
图3 HFM信号不同速度下的相关检测
从上述图中可以看出,HFM 信号时延分辨率较高,在相对运动10 m/s 时,相关检测峰值仍比较尖锐。
3 M元HFM信号扩频水声通信
系统将两个信息比特采用Gray 编码映射为四个可能的HFM信号脉冲,这种映射使2比特信息同时被译错的可能性大为降低,映射关系如表1 所示[9~10]。

表1 数据比特和HFM的映射关系
HFM扩频水声通信原理如图4所示。
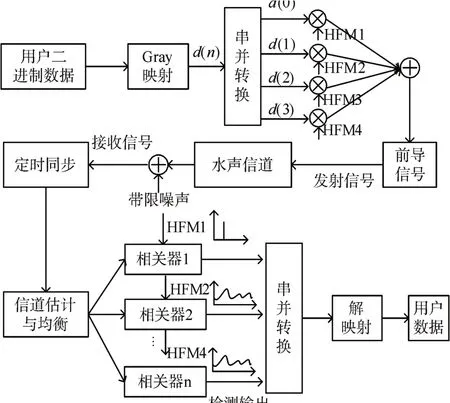
图4 HFM扩频水声通信原理框图
系统发送端将用户二进制数据比特先进行Gray 编码映射,再经串并转换分为多组,接着用不同HFM 信号进行扩频,多个扩频信号叠加形成数据帧,而后添加前导信号,进行发送。经水声信道后,接收端通过前导信号进行定时同步,接着用本地HFM 信号与接收信号做相关检测,并串转换,解映射后,译码恢复出用户二进制数据[11~12]。
4 计算机仿真研究
利用Matlab进行算法仿真验证,系统仿真参数为采用4HFM-SS 调制,信息比特流用Gray 编码映射为4 个正负斜率HFM 信号,采样频率设置为48kHz,采用重采样模拟相对运动产生的多普勒频移;信号所占频带约为4kHz,一帧信号持续时间2s左右,通信速率大约为50bps。
仿真信道根据浅海典型水文条件由采用某水声信道模拟软件给出,模拟海深约为50m;声源位于水平距离0m、垂直深度10m 的位置;接收机位于水平距离5000m、垂直深度20m 的位置;从声源到接收机共有41 条多径。其局部特称声线图如图5所示。模拟信道的冲激响应如图6 所示。因为:1)如果反射声线到达时间已经超过信号的接收时间,那接收信号便不再受此多途影响;2)多次反射声线能量衰减很大,其作用可以忽略。所以仿真时可以选取其中部分路径。

图5 模拟水声信道特征声线图(局部)
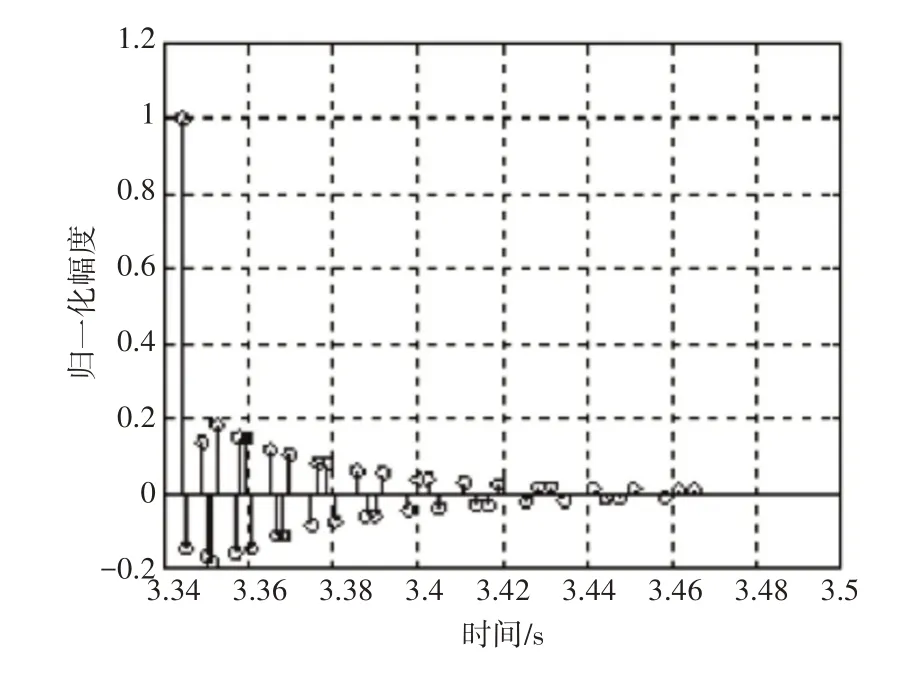
图6 模拟的水声信道冲激响应
背景噪声采用带限的高斯白噪声。
在模拟水声信道和带限高斯白噪声背景下,图7 为经过信道和白噪声加扰后的时域、频域信号,图8 是接收信号与本地同步码相关检测的结果,图9 是在模拟信道条件下-10dB、-5dB 信噪比情况下与Chirp扩频通信(CSS)方案通信误码性能比较。

图7 经过模拟水声信道的信号(SNR=-5)

图8 接收信号与本地HFM相关检测结果
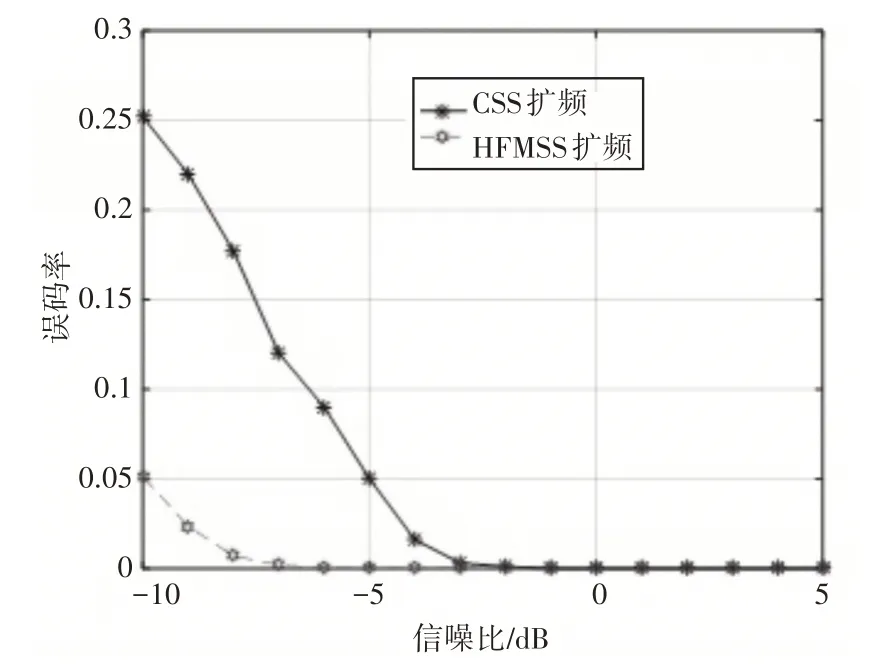
图9 误码率仿真结果
从以上仿真结果看出,采用HFM 信号扩频水声通信方案,100 比特数据的通信发射信号持续时间在2s左右,在浅海典型水声信道、-5dB信噪比条件下即可实现无误码传输,系统的稳健性要明显好于Chirp扩频(CSS)方案。
5 结语
文章着眼目前水下无人航行器自主能力不高,尚需外界适时信息支持和遥控干预的需求,分析并设计了一种基于CSS 扩频理论的HFM 信号扩频水声通信方案,理论分析和计算机仿真结果表明,该方法简单、可靠,且抗多途、多普勒性能优异,在浅海典型水声信道-5dB 信噪比条件下即可实现无误码传输,系统的稳健性要明显好于Chirp 扩频通信(CSS)方案,具有良好的应用前景。
猜你喜欢
军事文摘(2021年22期)2022-01-18
能源工程(2021年5期)2021-11-20
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
数学物理学报(2017年3期)2017-07-01
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
系统工程与电子技术(2016年7期)2016-08-21
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
西部广播电视(2015年9期)2016-01-18
西部广播电视(2015年9期)2016-01-18
