
基于故障树的疲劳驾驶检测装置故障研究*
2023-06-04 06:24:22黄巧亮
计算机与数字工程 2023年2期
任 重 黄巧亮
(江苏科技大学电子信息学院 镇江 212000)
1 引言
随着我国经济的快速发展,我国使用汽车的人数越来越多,导致道路上汽车越来越多并使得交通事故发生的频率也大幅度上升。在这些交通事故中,有很大一部分原因是因为驾驶员自身的原因所导致的,比如疲劳状态下驾驶汽车、行驶车辆时注意力不集中等,所以一些学者就开始研究疲劳驾驶检测装置,如蔡素贤、杜超坎等采用随机森林算法对从CAN 总线上采集到的车辆运行状态数据进行疲劳驾驶检测识别,并有效地检测驾驶员出驾驶员是否疲劳[1]。陈鑫、李为相等通过应用改进以后的ASM 算法对驾驶员的脸部特征进行数据采集和模糊推理,最终分析判断出驾驶员疲劳程度[2]。虽然这些研究取得了一定的效果,降低了事故发生的概率。
但也因此使汽车上被安装了许许多多的嵌入式电子产品,导致汽车电子技术变得越来越集中化和密集化,这样会使得车辆产生许多微小的电子控制系统故障且难以被察觉。为了避免一些交通事故是由于汽车上的子系统或者是装置发生故障所导致,一些学者就针对汽车上的子系统或装置展开相关的故障诊断研究。如方坤、陶军等为防止汽车液压ABS系统发生故障,采用故障树分析法对该系统的组成和原理进行分析,找出系统中薄弱环节[3]。辛梅、王英宇利用神经网络算法对汽车发动机进行故障原因样本训练,通过输入故障数值可对发动机进行全面的诊断[4]。但疲劳驾驶检测装置也会由于自身原因发生故障,导致无法有效地警示驾驶员从而发生交通事故。所以为保证疲劳驾驶检测装置能够正常工作,该装置需要提高工作可靠性以及在出现故障时能快速有效地排查并定位故障源是十分重要的。
2 疲劳驾驶检测装置的基本组成和工作原理
2.1 疲劳驾驶检测装置的基本组成
该疲劳驾驶检测装置是由图像采集模块、数据存储模块、报警模块、主控模块、CAN通信模块以及电源模块组成的。如图1 所示为疲劳驾驶检测装置的基本框图。
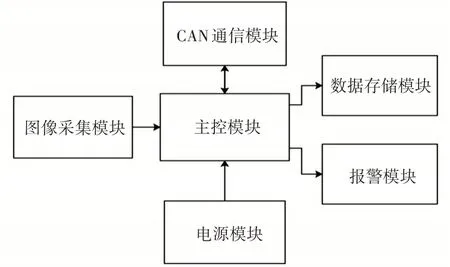
图1 装置的基本框图
2.2 疲劳驾驶检测装置的工作原理
检测装置先通过图像采集模块中的红外CCD摄像头对汽车驾驶员的面部表情进行实时采集照片,接着通过A/D 转换器将照片进行模数转换成数据,转换之后将数据传输至主控模块中的T7 芯片处理器上,与此同时在CAN 通信模块的工作下会将CAN 总线上的车上其他传感器的数据信号传输至T7 芯片处理器。接着将采集到的数据通过T7芯片处理器内的疲劳驾驶检测算法进行分析判断,如果确定驾驶员处于疲劳驾驶的状态,则会发送报警信号给报警模块,从而报警模块中的语音提示器发送警示指令。出现疲劳驾驶预警的数据会发送至数据存储模块进行存储,方便后期调用。
3 故障树分析介绍
故障树分析法是一种预测复杂系统的可靠性和安全性的方法,最早用于评价“民兵”导弹发射控制系统的安全性[5]。它先对系统进行分析,按照树状形式从总体到部分、从系统到元件逐层分析建立出相应的故障树模型,然后通过定性分析和定量分析,从两个方面计算底事件和顶事件发生的概率以及相关的重要度[6]。从而在对系统进行故障诊断以及对系统的优化提供理论基础。
4 基于故障树的疲劳驾驶检测装置故障诊断分析
4.1 故障树的建立
综合疲劳驾驶检测装置的原理以及故障分析,根据模糊故障树理论,建立相关故障树模型。用T标记顶事件,用E标记中间事件,用X标记底事件[7]。采用下行法的数学方法建模,如图2 所示,故障树中各符号代表的含义如表1所示。
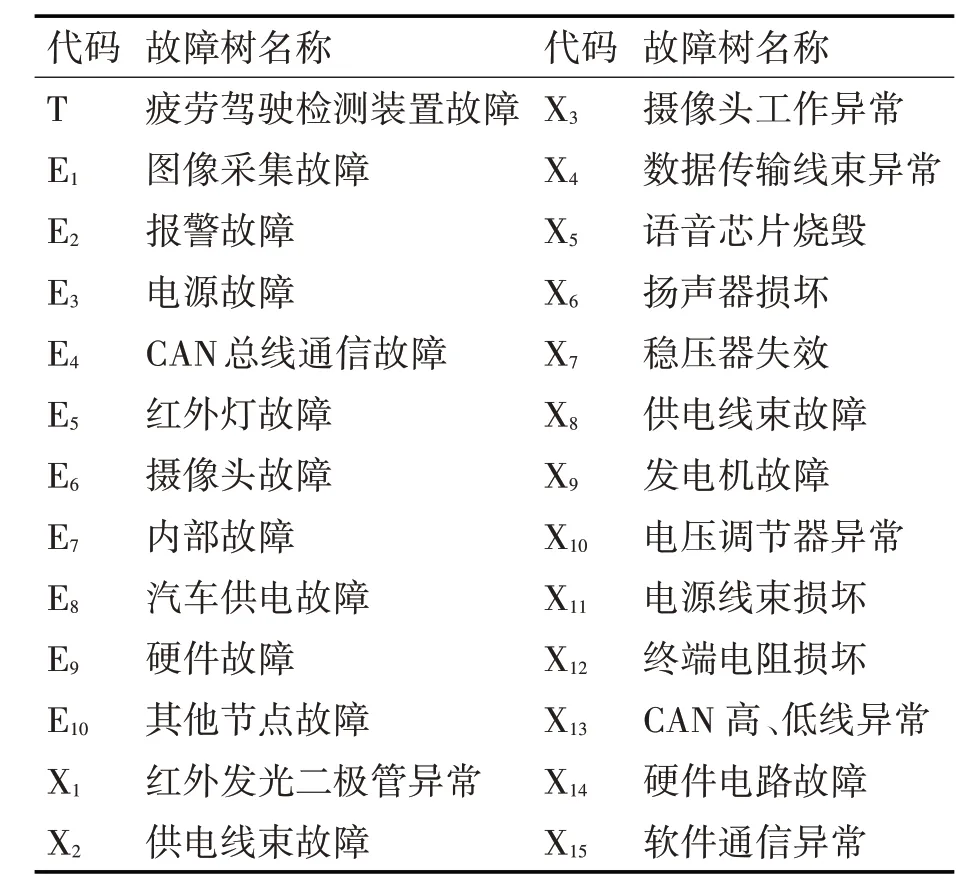
表1 故障树中各符号代表的含义
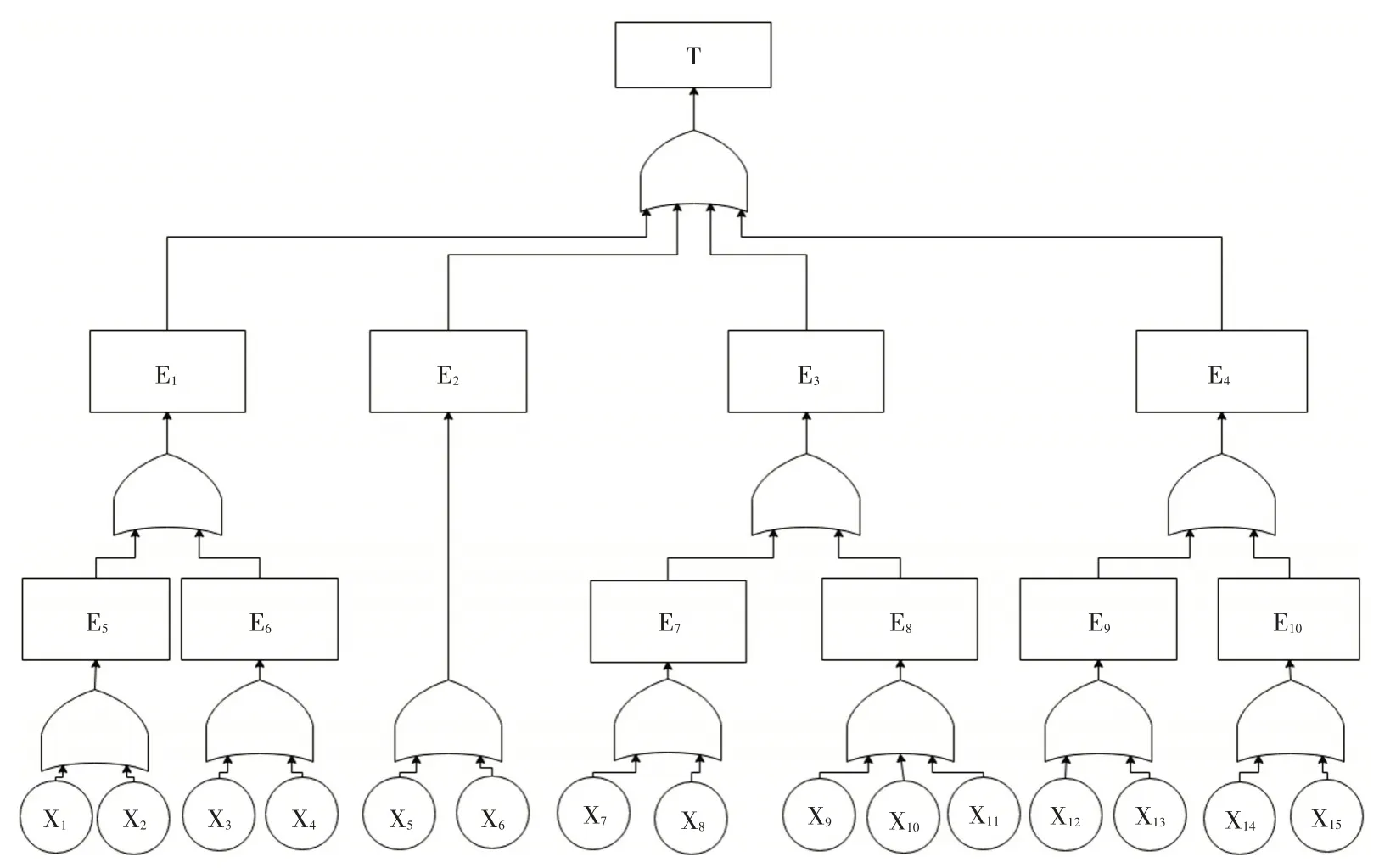
图2 疲劳驾驶检测装置故障树
4.2 故障树的定性分析
故障树定性分析是通过对故障树逐级进行分析系统故障原因或系统原因的组合,找出系统的薄弱环节,找出导致顶事件发生的所有最小割集[8]。现采用下行法求解疲劳驾驶检测装置故障树的最小割集,由此获得故障树的全部割集。
T=E1∪E2∪E3∪E4=E5∪E6∪X3∪X4∪E7∪E8∪E9∪E10=X1∪X2∪X3∪X4∪X5∪X6∪X7∪X8∪X9∪X10∪X11∪X12∪X13∪X14∪X15
通过表达式可以看出该故障树共有15 个最小割集,具体分别为X1、X2、X3、X4、X5、X6、X7、X8、X9、X10、X11、X12、X13、X14、X15。
故障树实际上是由各个底事件构成,这些底事件对顶事件均产生影响,因此在不考虑底事件发生概率的情况下对故障树进行定性分析求出底事件的结构重要度[9]。底事件结构重要度的计算一般采用通状态枚举法,底事件的结构重要度:
底事件i的状态
顶事件的状态
式中,m 为底事件的总数;2m-1为系统在底事件i 不发生时的所有次数;nφ(Xi=1) 为顶事件在底事件i发生时会发生的次数;nφ(Xi=0 )为顶事件在底事件i发生时不会发生的次数。
底事件X9、X10、X11为例,采用状态枚举法计算三个底事件结构重要度的状态枚举表如表2所示。
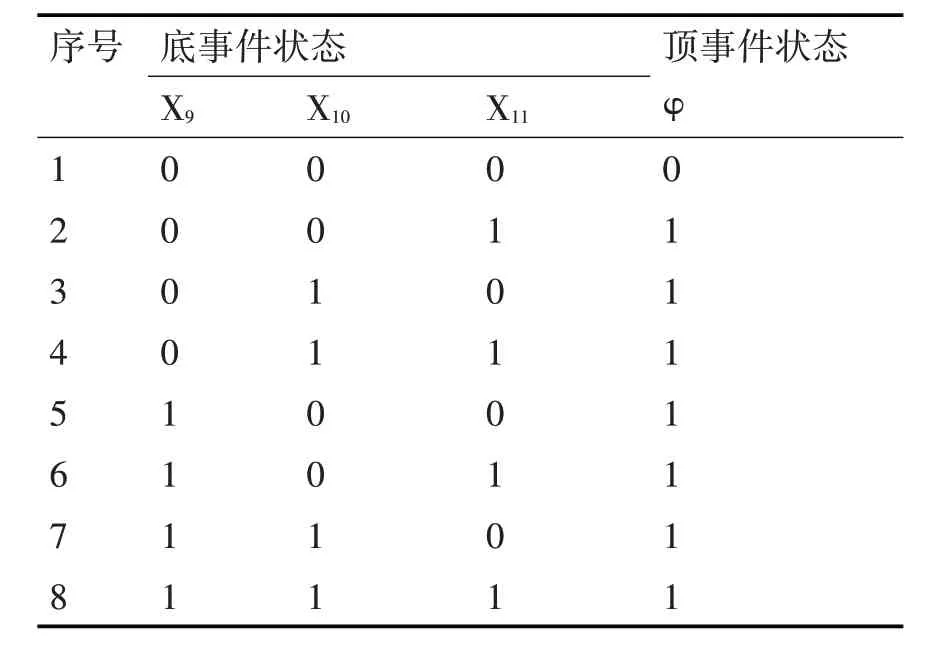
表2 底事件的枚举情况
底事件X9的结构重要度
底事件X10的结构重要度
底事件X11的结构重要度
通过计算所得,三个底事件的结构重要度是相同的。根据故障树可以看出,疲劳驾驶检测装置故障树中任意一个底事件Xi到顶事件T 的结构重要度均相同。
4.3 故障树的定量分析
对故障树定量分析的目的是计算出顶事件发生概率以及各个底事件的相关重要度,用以评价系统的安全可靠性。但由于在实际当中很难获取系统底事件发生的精确概率,限制了对故障树准确分析[10]。而模糊数学理论集合具有处理模糊和不精确信息的优点,所以将FTA与模糊理论相结合。因此本文将引入模糊数学理论,通过专家经验法对故障树底事件发生概率给出模糊判断,再结合专家权重,对模糊数进行加权求和处理,求出对应的底事件模糊发生概率,以及相关的底事件概率重要度和关键重要度,对故障树分析的基本事件进行定量分析。
4.3.1 计算专家权重
邀请了行业里具有工程实践经验的十位专家对该模型进行评价。由于各位专家的职称、学历和工龄等自然信息不同,所以给出意见的可信度不同,因此赋予不同的权重。如表3 所示。通过强制比较法对每项进行赋值。然后根据实际情况求出每位专家的权重值,计算公式为
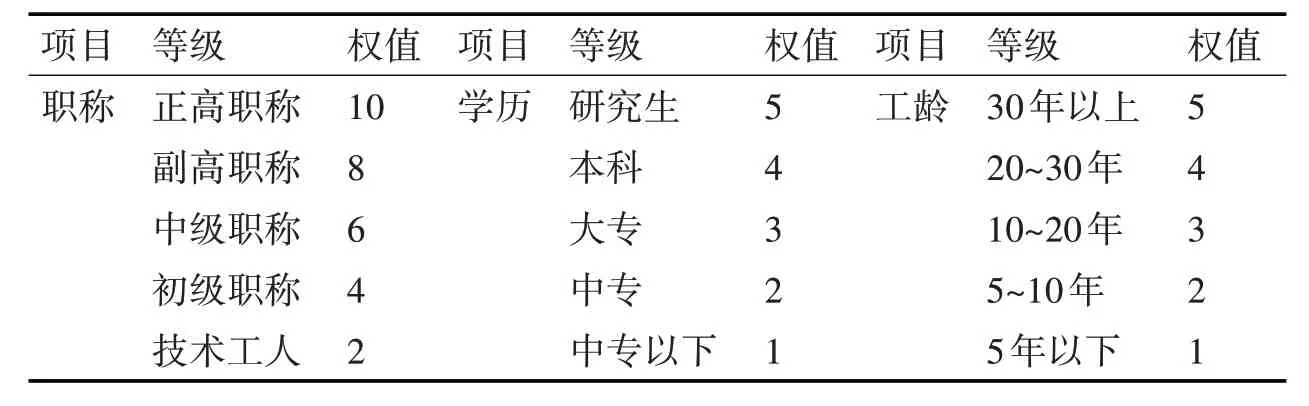
表3 专家权重评判等级
其中,i表示为专家号,共有十位专家;j表示为项目号,共为三项。最终经过计算所得每位专家的权重值如表4所示。
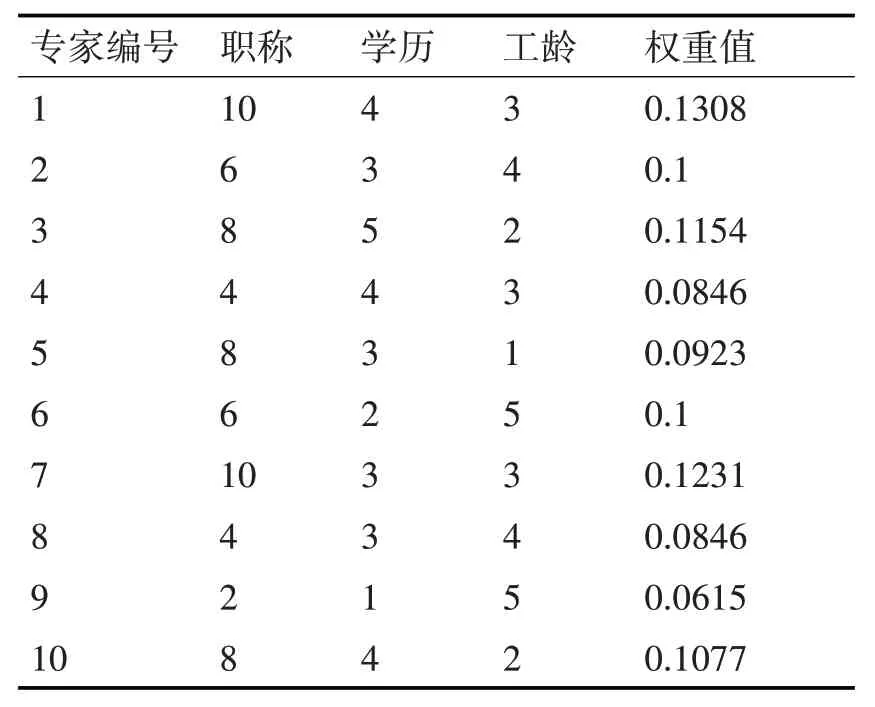
表4 各专家的评判分数及权重值
4.3.2 计算各底事件模糊数
专家经验法是指专家很难对所有事件发生的概率给出精确地估算值,所以很多都是根据自己的经验采用一些语言值来进行表示出底事件的模糊概率[11]。本文采用的语言值的集合为{很小(VS),小(S),较小(FS),中等(M),较大(FL),大(L),很大(VL)}来评价底事件发生的模糊概率。
不同语言值所对应的不同模糊数如图3所示。
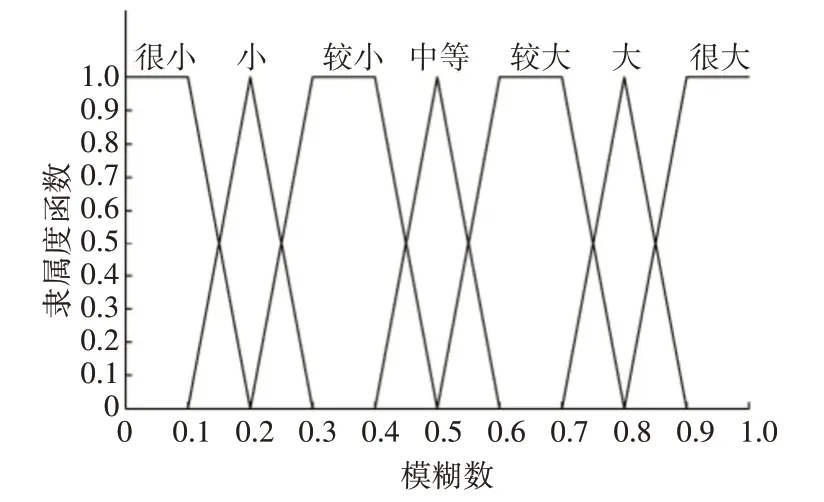
图3 代表语言值的模糊数表达式
与此对应的三角模糊数A=(a,b,c)和梯形模糊数A=(a,b,c,d)的隶属度函数表示为
因为要在合成模糊数时方便计算,因此引入λ截集。这样便可以将模糊数转化为区间数进行计算,而各模糊数形式与λ截集的对应关系如表5所示。
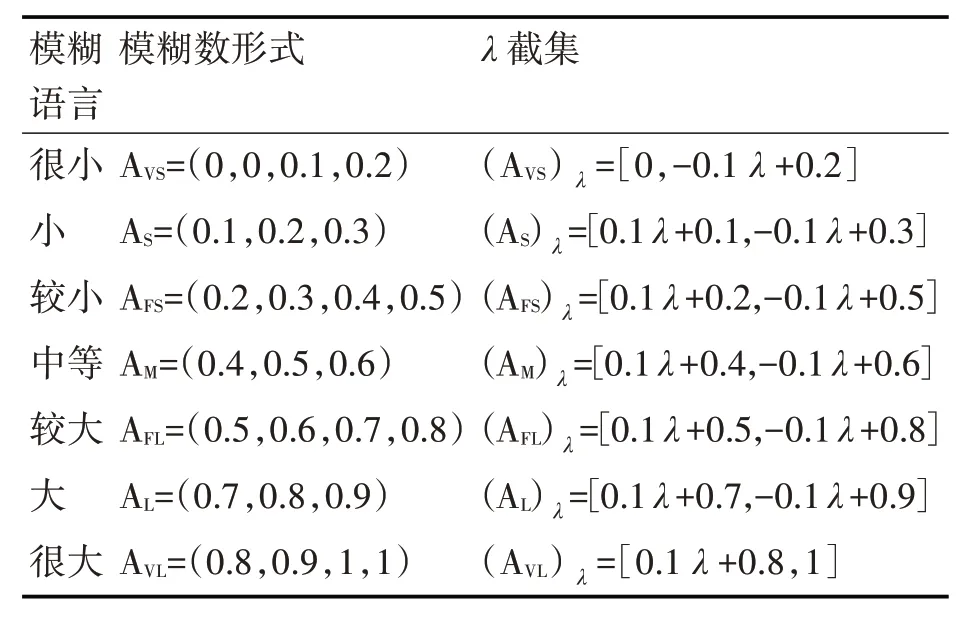
表5 模糊数形式和λ 截集
选取对故障树分析对象熟悉的N 位专家组成评估团,设第K 位专家对第i 个底事件失效的评判为A(i)k,则第i个底事件失效的模糊数为
上式进行了加权线性组合,RK表示由上文确定的第K 位专家的权重因子,A(i)k为三角/梯形模糊数,其λ截集形式为
表6 是10 位专家通过经验积累对疲劳驾驶检测装置故障树中各个底事件出现故障的可能性给出的模糊判断。
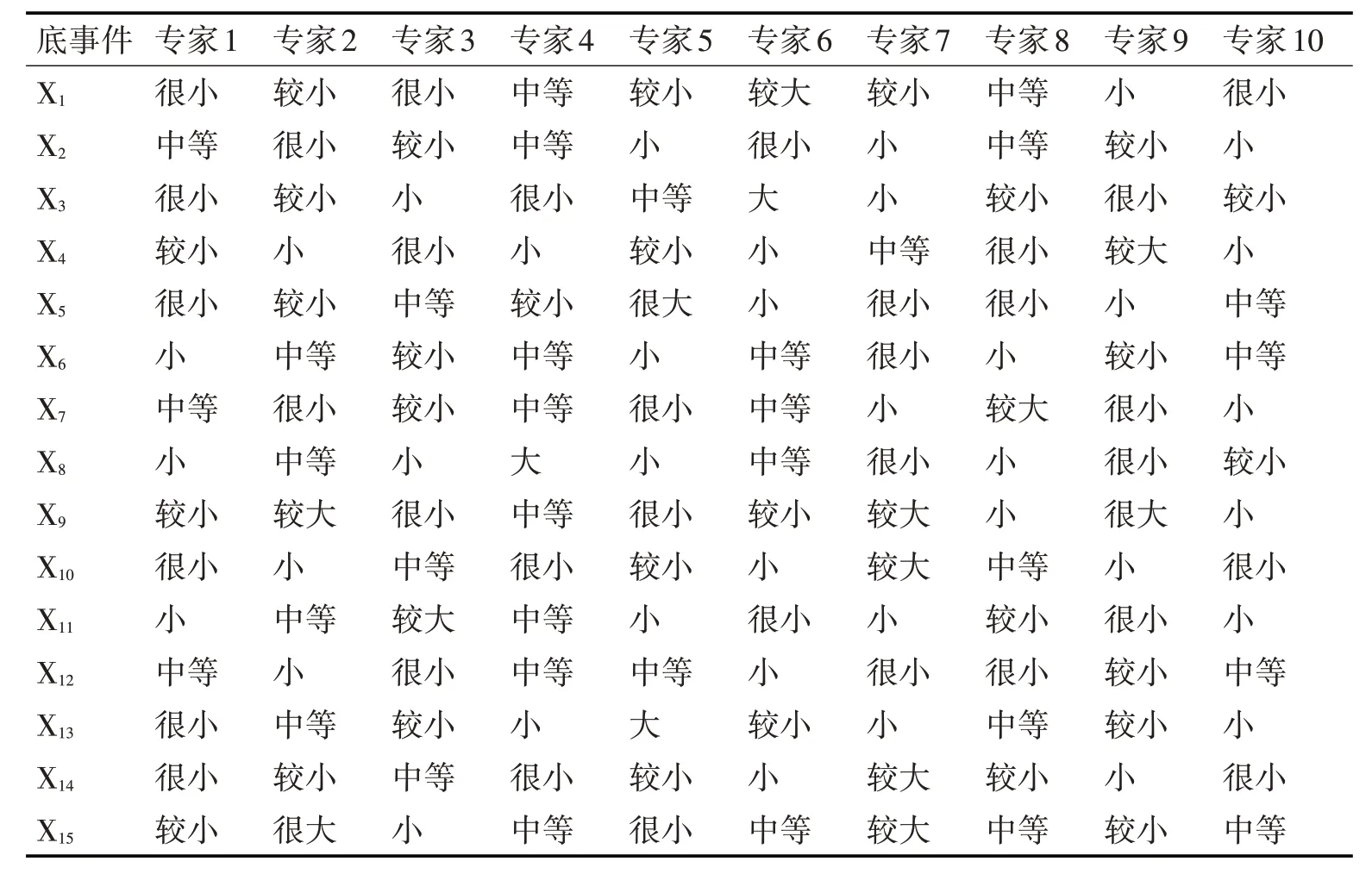
表6 10位专家对各底事件的模糊判断
以底事件X1为例,10 位专家对其评判依次为“很小”、“较小”、“很小”、“中等”、“较小”、“较大”、“较小”、“中等”、“小”、“很小”,将专家的语言值通过λ截集进行合成形成模糊数的形式,则X1底事件所对应的模糊数为
则隶属度函数为
由于在分析底事件发生的概率时引入了模糊数,则在故障树分析中必须把模糊数转化为一个清晰值,即模糊可能性值(FPS)[12]。因此我们使用左右模糊数排序法,将模糊数转化为对应的模糊可能性值。该方法首先需要定义出最大模糊集与最小模糊集为
则模糊数M的左右模糊可能性值分别为
由于故障树底事件发生的概率中,一些可能是已知的,另一些则是由模糊集理论和专家判断法相结合得到的,所以为确保已知失效概率和模糊失效概率之间的一致性,则需要把FPS转化为模糊失效率FFR[13]。即
通过计算可得k=2.9908,FFR=0.0010214。通过计算可以得到底事件X1的模糊发生概率为1.0214X10-3。
利用上述公式,可以求得出各个底事件的平均模糊数和模糊失效率如表7所示。
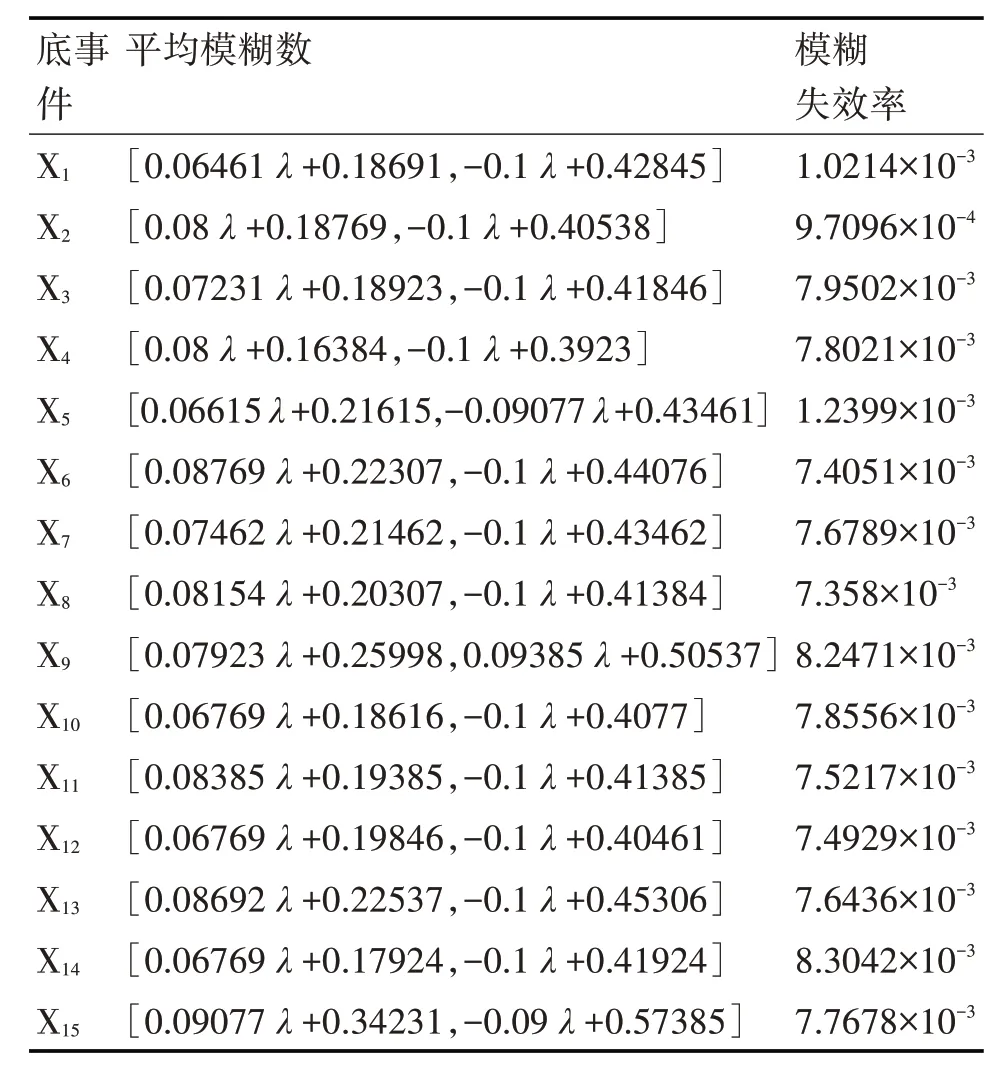
表7 各底事件的平均模糊数和模糊失效率
当计算中间事件和顶事件的模糊发生概率时,因为整个故障树的各个底事件都是通过或门形成中间事件,再通过或门形成顶事件。因此通过或门求出上层事件概率的计算公式为
当计算中间事件E5时,利用公式。
其它事件以此代入公式,得中间事件与顶事件的模糊发生概率如表8所示。
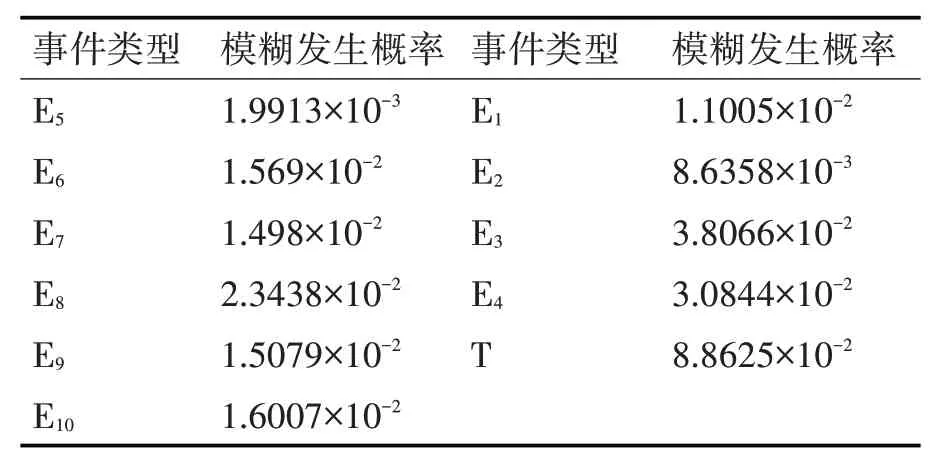
表8 中间事件及顶事件的模糊发生概率
4.3.3 计算底事件概率重要度和关键重要度
我们可以用底事件的概率重要度来表示出底事件对系统故障产生的影响程度。当已知各个底事件发生的概率时,可用顶事件的发生概率对某个底事件的发生概率的偏导数表示这个底事件的概率重要度[14]。
设P(t)为顶事件的发生概率,Pxi(t)为底事件xi的发生概率,Ixi为底事件xi的概率重要度,即。而当各基本事件发生概率不等时,还需要结合关键重要度,关键重要度表示第xi个基本事件发生概率的变化率引起顶事件发生概率的变化率[15],表达式为中,Pxi(t)是底事件xi的发生概率,P(t)为顶事件的发生概率,Ixi为底事件xi的概率重要度。通过上述公式,计算出各个底事件的概率重要度和关键重要度,如表9所示。
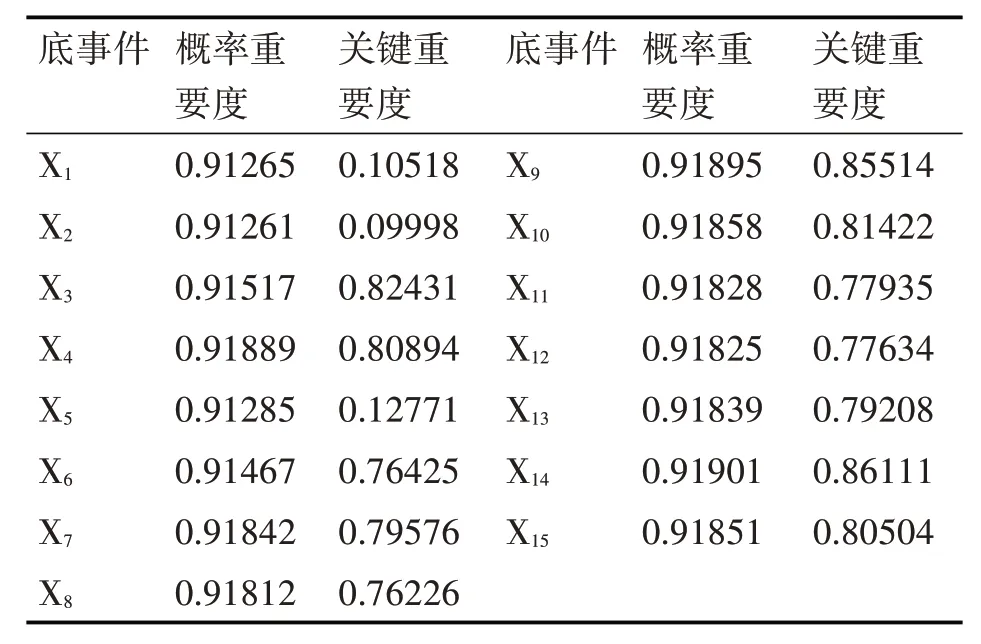
表9 各底事件的概率重要度和关键重要度
5 结语
可得出结论如下:
1)通过对疲劳驾驶检测装置的系统性分析和研究,建立相应的故障树模型。并确定了故障树中共有15 个最小割集以及各个底事件的结构重要度。
2)结合专家经验法和模糊数学理论,计算出各个底事件的模糊失效率和顶事件发生的模糊概率,并计算出每个底事件的概率重要度和关键重要度。
3)从数据中我们发现大概率影响装置可靠性的底事件分别为X3、X9和X14,所以当我们进行故障诊断时可以优先排查这些地方,提高诊断效率,为提高系统可靠性提供有效依据。
4)我们可以根据所得到的所有数据进行分析,找出装置中存在的薄弱环节,为各部分的设计和优化提供一定的参考价值。
猜你喜欢
中学生数理化·中考版(2022年6期)2022-06-05 06:49:10
计算机应用(2022年2期)2022-03-01 12:35:06
中学生数理化·中考版(2021年6期)2021-11-22 07:52:30
新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50
新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50
石油石化绿色低碳(2019年6期)2019-01-14 01:16:24
Coco薇(2017年10期)2017-10-12 19:43:59
宠物世界·猫迷(2016年3期)2016-04-23 19:54:06
电测与仪表(2016年17期)2016-04-11 12:39:38
新疆钢铁(2016年3期)2016-02-28 19:18:55
