面向浅海水声通信的TB-GOMP信道估计算法
2023-05-31 10:46孟熹亚刘增力
兵器装备工程学报 2023年5期
孟熹亚,刘增力
(昆明理工大学 信息工程与自动化学院, 昆明 650504)
0 引言
随着人类对海洋不断地开发利用,水下通信技术也得到不断提高。水声通信是水下高速、高可靠数据传输的唯一途径,如今水声通信已广泛应用于科研、军事和商业等领域,如海底数据收集、国家安全防御和海上石油远程遥控等[1-2]。水声信道被认为是最复杂的信道,其中浅海水声信道受边界条件(海面和海底)以及海水温度分布的影响非常大,使得浅海信道环境更为复杂,是具有较大时延的典型多径传播信道[3]。在复杂的浅海环境下实现水声通信的前提是通过信道估计获得准确的信道状态信息(channel state information,CSI),信道估计也是发送端自适应调制、信道均衡技术、接收机设计的关键,更是信号高质量恢复的基础和衡量水下通信系统性能的重要指标[4]。
OFDM系统采用多载波调制方式提高了频谱利用率和抗多径干扰的能力,因此被广泛应用于水声通信[5],但由于水下信道的时变和高噪声特性,使得传统的最小二乘(least square,LS)法、最小均方误差(minimum mean square error,MMSE)法等信道估计方法需要大量的子载波来传输导频信息以保证信道估计的准确性,严重占用频谱资源[6],且插值类信道估计方法不能有效消除由多径引起的频域选择性衰落信道的影响,无法准确估计出数据处信道频域响应,估计性能较差。研究表明,水声信道是在时域响应中具有大量零抽头的稀疏信道,压缩感知类算法能够充分利用信道稀疏性,用较少的导频获得更好的信道估计效果[7-8]。压缩感知算法对稀疏信号重构的本质是l0范数优化问题,该问题是NP-hard的非凸优化问题。基追踪(basic pursuit,BP)算法[9]和最小绝对收缩选择算子(least absolute shrinkage and selection operator,LASSO)[10]用l1范数代替l0范数,将上述问题转化成便于求解的凸优化问题。上述2种算法提高了估计精度,但计算复杂度较高,且未充分考虑噪声影响。基追踪去噪(basis pursuit denoising,BPDN)算法是BP算法在有噪声情况下的改进,通过求解扰动线性规划问题重建原信号,但由于其算法复杂度受信道多径时延影响较大,且运行时间过长无法对复杂多变的水声信道进行及时有效的估计[11]。贪婪迭代算法估计精度高、运算速度快、硬件实现简单,且对噪声具有鲁棒性,被广泛应用于水声信道估计中。匹配追踪(matching pursuits,MP)算法[12]是最早被提出的经典贪婪算法,该算法通过多次迭代逼近原始信号,如果残差在已选择的原子进行垂直投影后是非正交的,则每次循环得不到最优解。基于MP算法改进的正交匹配追踪(orthogonal matching pursuit,OMP)算法[13]保证了残差和已选取原子的正交性,因避免相同的原子被重复选中,从而提高估计精度和收敛速度。此后,一些基于OMP改进的算法陆续被提出,压缩采样匹配追踪算法(compressive sampling matching pursuit,CoSaMP)[14]和正则化正交匹配追踪算法(regularized orthogonal matching pursuit,ROMP)[15]每次迭代选取多个原子,并且CoSaMP算法采用回溯思想,ROMP算法通过正则化标准对原子进行二次筛选,二者在估计精度和速度上相较于OMP算法有所提高。GOMP算法[16]同样在每次迭代中选取多个原子减少运算时间,在无噪声环境下效果优于OMP算法,但在噪声较大、信噪比(signal noise ratio,SNR)偏低的水声信道中估计性能较差。
针对GOMP算法的不足,本文提出的TB-GOMP从多角度对GOMP进行了改进,首先提出合理的原子门限,对原子精细筛选,提高支撑集的可靠性,减少的原子数降低了最小二乘的计算量,相对提高了运算速度,且原子二次筛选降低了原子选取数S对算法性能的影响。其次,TB-GOMP算法中引入回溯思想消除GOMP算法中包含的误选原子。最后迭代条件的设定充分考虑噪声因素,提高了算法综合性能。为验证所提算法,在稀疏水声信道下从算法运行时间、信道估计归一化均方误差和误比特率对比CoSaMP、ROMP、GOMP和本文中所提算法性能,并通过选取不同导频数和原子数验证所提算法的稳定性,实验表明在多个指标下所提算法在稀疏水声信道估计应用中均具有优越性。
1 系统模型
在水声通信中,水声时变信道冲激响应一般定义为如下[17]:
(1)
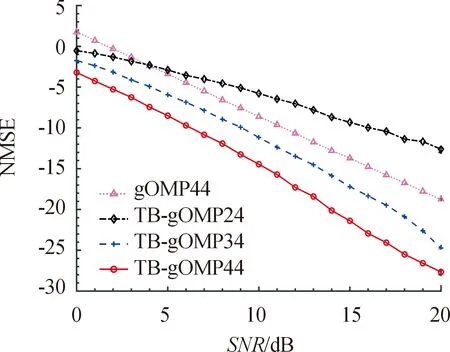
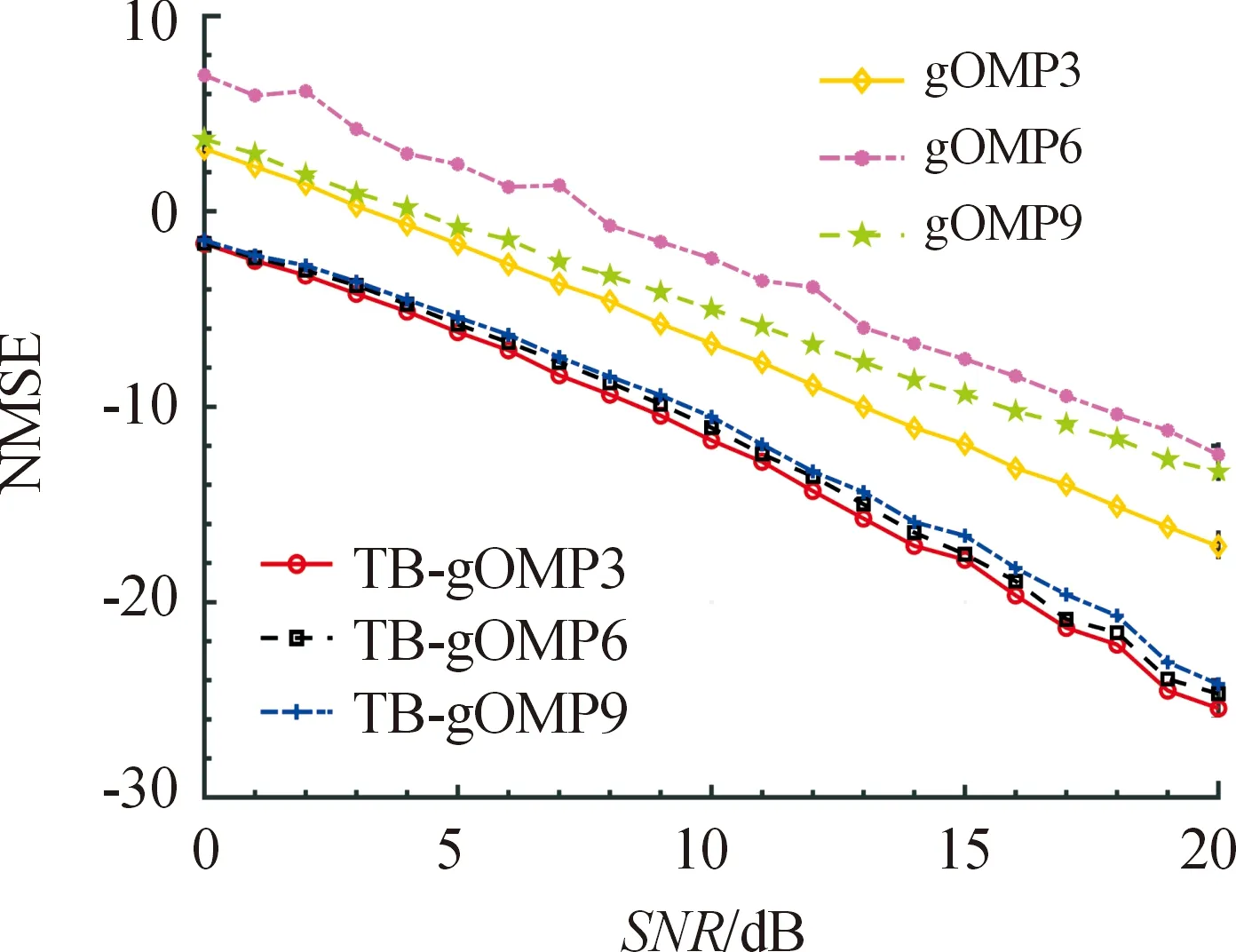
式中:hi(t)和τi(t)分别为t时刻第i条路径的复增益和时延,L为信道长度,对于稀疏水声信道,只有K条路径携带信道信息,且K< 考虑一个具有N个子载波的OFDM系统,并且假设信道的相干时间远远大于OFDM符号周期,在OFDM符号周期中,信道响应是时不变的。则公式(1)可以写为: 输入的数据流经过调制、串并转换和快速傅里叶逆变换得到时域信号x(n),再通过水声信道: y(n)=x(n)*h(n)+g(n) 式中:h(n)为h(τ)离散后的时域信道冲激响应,x(n)和h(n)进行卷积后加入高斯白噪声g(n)最终得到输出信号y(n),为避免码间干扰,在OFDM符号前面加入循环前缀(cyclic prefix,CP),CP长度大于最大时延扩展τmax。 经过去CP并对y(n)做N点快速傅里叶变换得到: 则频域接收信号为: Y=XH+G=XDh+G (2) 其中,X= diag (X0,X1,…,XN-1)为OFDM符号中携带的有用数据和导频数据,维度为N×N,H为N×1的信道频域响应,通过对时域信道冲激响应做N点离散傅里叶变换(discrete fourier transform,DFT)得到,具体展开表示为H=Dh,即DFT矩阵D和时域信道冲激响应h的乘积。 在压缩感知OFDM框架下,先用导频定位矩阵R得到收发双方都已知的P个导频子载波,并用其恢复完整信道冲激响应,则式(2)可以写为: YP=XPDPh+GP (3) 其中,YP=RY为包含导频数据的接收信号,这里称为测量向量,XP=RXRT为包含导频数据的发送信号,稀疏矩阵Dp是维度为P×L的DFT矩阵,GP=RG为导频处的噪声信号,令传感矩阵M=Xp×Dp,则式(3)可以写为: YP=Mh+GP (4) 为了使式(4)获得唯一的稀疏解,M应满足有限等距性质(restricted isometry property,RIP): 其中,δ2k是与稀疏度K有关的常数,如果δ2k≤1,则M有较大的概率稳定重构出K稀疏信号h[18]。 文献[16]中提出了OMP算法的推广算法,即GOMP算法。OMP每次只筛选与残差最相关的一个原子,而GOMP算法则是筛选出S个与残差最相关的原子,但迭代次数减少、算法复杂度降低、运行时间缩短,GOMP算法流程如算法1所示: 算法1GOMP 输入:测量向量YP,传感矩阵M,稀疏度K,原子选择数S。 初始化:残差r0=YP,迭代次数t=1,支撑集Λ0=∅; 1) 计算内积并取绝对值:u=|〈rt-1,mj〉|, 1≤j≤L,mj为矩阵M的第j列; 2) 挑选原子:选择u中最大的S个值,并将其对应于M的列序号j构成集合J0; 3) 扩容支撑集:Λt=Λt-1∪J0,MΛt=MΛt-1∪mj,j∈J0; 4) 通过最小二乘运算估计信道: 6)t=t+1,当t≤min(K,P/S)时返回到第1)步;否则终止迭代。 由算法原理可知,GOMP算法仅是针对OMP原子选择上的改进,多选的原子虽会减少迭代次数,但增加了算法1中第(4)步的计算负担,同时降低算法重构精度。此外,S值选取的偏差会导致估计结果相差较大,且该算法未体现在有噪声情况下的处理,针对以上问题提出TB-GOMP算法。 TB-GOMP算法对GOMP算法提出以下3个方面的改进: 1) 原子筛选门限。通过算法1中的第(1)步得到内积后进行排序,取内积最大的前2个值ut1和ut2设计原子选择门限α: (5) 从式(5)可以看出,门限值的选取采用了在2个原子间取折中的思想。其中μ是折中因子,取值过大,会筛除有效原子,估计误差偏大;取值过小,相关度低的原子无法滤掉,导致算法2第(6)步计算量过大,运行时间长,故所提算法μ值范围在设置在[0.2,0.4],3.1节中的实验测试表明了在这个范围内从运行时间和估计精度方面都表现出较好的效果。每次迭代时ut1和ut2都会随更新残差的变化而变化,而μ在实验时取固定值,故式(5)中所提α在算法的迭代过程中是一个动态变化的门限,由此可以保证在每次迭代时都能通过门限筛选出相关度更高的原子。 从S个原子中重新筛选出大于门限α的Sα个原子有3方面改善:其一是原子选择更精确:计算内积的本质是计算原子相关度,原子选择门限由内积值最大的前2个原子确定,保证了二次筛选的原子的准确度,提高了支撑集的可靠性;其二是降低运算复杂度:Sα列组成的矩阵进行最小二乘法运算时涉及矩阵的伪逆运算,由于Sα≤S,因此减少了此步的计算量;其三是提高算法稳定性:浅海水声信道环境恶劣且未知,会导致信道稀疏度的多变,水声信道估计之前一般先对稀疏度进行估计,稀疏度估计的偏差导致原子选取个数的偏差,选择过多或过少都会影响估计精度,而二次筛选会降低原子选择数S对估计结果的影响和对稀疏度的依赖性,从而提高算法的稳健性。 2) 加入回溯。对于GOMP,当完成K次迭代时,最终选择的原子数为KS个,而对于改进算法TB-GOMP,完成迭代过程最终选出的原子数在K和KS之间,仍有误选原子数扩大支撑集的问题。引入CoSaMP算法的回溯思想,每次迭代时用最小二乘法恢复稀疏信号后,只挑选前K个最大值和其对应位置传感矩阵的列进行残差计算,采用最后一次迭代的K个最大值对应的原子去求稀疏解,以此提高稀疏解的可靠性。 3) 迭代停止条件。算法迭代停止条件会影响重构精度,停止条件过高无法对信道进行完整精确的估计,过低会造成收敛速度慢,由于式(4)是从噪声中恢复信道冲激响应,因此在改进算法中用噪声的l2范数作为迭代停止条件: (6) 其中,Gp是导频处的频域噪声,有些情况下无需迭代min(K,P/S)次,达到迭代条件式(6),即可从噪声中较准确地恢复出稀疏信道,从而提高算法收敛速度,TB-GOMP算法步骤如算法2所示: 算法2TB-GOMP 输入:测量向量Yp,传感矩阵M,稀疏度K,原子选择数S。 初始化:残差r0=Yp,迭代次数t=1,支撑集Λ0=∅; 1) 计算内积并取绝对值:u=|〈rt-1,mj〉|, 1≤j≤L,mj为矩阵M的第j列; 2) 挑选原子:选择u中最大的S个值uS,保留S个值对应于M的列序号; 3) 通过式(5)计算原子门限α; 4) 对原子进行二次筛选:从这S个原子中选出uS≥α的Sα个原子,并将其对应于M的列序号j构成集合J0; 5) 扩容支撑集:Λt=Λt-1∪J0,MΛt=MΛt-1∪mj,j=1,2,…,Sα; 6) 通过最小二乘运算估计信道: 仿真实验中所用水声OFDM符号含512个子载波,调制方式为16QAM,由于OFDM的信号功率谱是很多频移后的sinc函数的总和,具有较大带外功率,会造成邻道干扰,用虚拟载波(即传输带宽两端不使用的空载波)可以抑制邻道干扰。考虑频谱效率因素,本实验中OFDM符号两端一共设置52个空载波。导频数据采用梳状方式随机插入信号子载波中,为避免码间干扰,CP长度大于信道长度。 本实验中均采用BELLHOP水声信道模型仿真稀疏水声信道冲激响应,使用一个声源和一个接收器,深度分别为12 m和15 m,声源与接收器之间的距离为1 000 m,声线掠射角为[-80°,80°],图1(a)的声速剖面为某浅海海域水深60 m处的实测数据,按照上述环境下仿真出稀疏度为12的水声信道冲激响应,归一化后去掉幅值小于0.1的冲激后得到如图1(b)所示的稀疏度K为8的信道,用该信道作为仿真所用信道,横轴为相对时延,纵轴为归一化幅度,由图1(b)可知该水声信道具有明显的稀疏性。 图1 BELLHOP水声信道仿真 在上述环境下,通过实验证明TB-GOMP算法中μ值范围选取[0.2,0.4]的合理性,设置导频数为34,原子选择数S为4,对比μ值取0.1、0.2、0.3、0.4和0.5时的归一化均方误差(normalized mean square error,NMSE)和所用时间,每种信噪比下NMSE的定义如下: 其中T是每种信噪比下仿真的次数,本次实验中每种算法都进行了1 000次仿真,信噪比是0~20 dB,μ取不同值时的NMSE如图2所示,所用时间如表1所示。 通过图2可以看出,当μ值选取偏大时(即μ=0.5时),导致原子门限设置过大,无法对原子进行有效筛选,当信噪比增大时,NMSE较大且曲线趋于平滑,信道估计结果偏差较大,同时表1也说明了取值偏大时挑选原子过少导致迭代次数增加,从而运行时间变长,当μ值选取偏小时(即μ=0.1时),信道估计的NMSE和μ=0.2时接近,但增加的计算量需要耗费更多时间。通过实验权衡估计精度和运算速度两个指标,可以将μ值取在[0.2,0.4],以此为依据,3.2节的仿真实验均取μ=0.3。 图2 不同μ值下信道估计的NMSE 表1 不同μ值下的运行时间 仿真1主要对比ROMP 、CoSaMP、GOMP和改进算法TB-GOMP的NMSE和误比特率(bit error ratio,BER),为了更客观地验证各种算法的实验效果和本文中所提算法的有效性,采用控制变量法,仿真时除所用算法不同外,OFDM的参数和水声信道环境同3.1中的设置相同,导频数量均为34个。4种算法每次迭代都选取多个原子,首先计算传感矩阵各列与残差的内积,然后实验中不同算法按照各自提出的方式进行原子筛选,其中ROMP算法最大的改进是提出通过正则化对原子2次选择,每次迭代时选出内积最大前K个值,从K个值中筛选出不大于其最小值2倍且能量最大的原子,CoSaMP算法每次迭代时选出内积最大的前2K个值进行支撑集扩充,GOMP和TB-GOMP算法每次迭代时选出内积最大前3个值(即S=3),并且TB-GOMP算法按照式(5)所提出的原子选择门限进行2次筛选。不同算法下的NMSE和BER如图3和图4所示。 由图3和图4可以看出压缩感知类算法都可以用较少的导频从噪声中恢复出整个信道,且NMSE和BER曲线走势相同。4种算法的NMSE和BER都随着信噪比的增加而变小,相比之下,TB-GOMP算法在2个指标下的仿真结果都优于其他算法。GOMP算法每次迭代时挑选S个值扩充支撑集,并用它们支撑集所对应于传感矩阵的列进行最小二乘运算,进而更新残差,故每次迭代的残差受所挑选原子的影响,原子挑选不够精细降低了每次迭代中残差值的准确性,上一次迭代的残差参与下一次迭代中的内积运算,造成误差累积,并且由于没有引入回溯思想,误选原子数变多,所以相较其他算法效果更差。CoSaMP算法进行支撑集扩充时同样存在误选原子问题,相较于GOMP算法,CoSaMP算法采用了回溯的思想,所以估计效果优于GOMP。ROMP算法所用的正则化方式与TB-GOMP算法中原子门限相比,筛选出来的原子相关性较低,由于正则化每次挑选的原子多于一个,最终得到原子数多于K个,没有进行回溯删除误选原子,影响了估计效果。从图3可以看出当信噪比达到10 dB后,该算法的NMSE下降得很平缓,信噪比较大时效果低于其他算法。 图3 不同信道估计方法的NMSE比较 图4 不同信道估计方法的BER比较 导频数目也会影响算法的重构精度,为了探究改进算法在不同导频数目下的估计效果,仿真2中GOMP算法和TB-GOMP算法的原子选择数S均取3,用导频数为44的GOMP算法和导频数分别为24、34和44时的TB-GOMP算法进行仿真实验对比,NMSE结果如图5所示。其中导频数注于图例算法名称后。 图5 不同导频数信道估计的NMSE 由图5可以看出,导频数越多,改进算法的估计性能越好,并且TB-GOMP能用更少的导频获得比GOMP更好的效果,相比于导频数为44的GOMP,仅用34个导频的TB-GOMP算法在整个过程中的估计效果要比GOMP好3~5 dB,并且在10 dB之前的低信噪比下,44个导频数的改进算法可以获得5dB的性能增益,并且性能增益随着信噪比的增加变大,当信噪比为20 dB时,改进算法可以有10 dB的增益。即使TB-GOMP算法仅选用24个导频(约占有用载波数的5%),在4 dB之前的低信噪比下,仍然要好于使用44个导频的GOMP算法。 为了验证改进算法对原子选择数S的依赖性,仿真3分别对S为3、6和9时的TB-GOMP算法和GOMP算法进行对比仿真,GOMP算法和TB-GOMP算法的导频数均为34,仿真结果如图6所示。 图6 选取不同原子数信道估计的NMSE 由图6可知,原子选择数S值选取的不同造成GOMP算法估计效果的差异,由于GOMP未进行回溯,当S取值偏小时估计出的冲激响应的个数更接近稀疏度,所以S=3时的估计效果比S=6和S=9时相对较好,而TB-GOMP算法在S取不同值时估计性能受原子选择数的影响很小,NMSE曲线比较接近,由此可以说明TB-GOMP算法的稳定性更高,并且在S值大于稀疏度时改进算法依然适用。 表2 不同算法运行时间 如表2所示,仿真4对比了不同算法在0~20 dB信噪比范围内,每种信噪比下仿真1 000次所用总时间,小数部分精确到百分位,参数设置与仿真1相同。这几种算法计算量主要集中在最小二乘法中矩阵的伪逆运算,由于ROMP和TB-GOMP都进行二次原子筛选,原子数的减少降低了矩阵伪逆的运算量,故相较于其他算法运行时间更短,由表2可知,TB-GOMP算法的时间比GOMP少了近1.8倍,比CoSaMP少了近2.5倍,在时间方面呈现显著效果。 本文分析了GOMP算法由于筛选的原子相关性不高、误选原子数过多且未考虑噪声情况的问题,提出TB-GOMP算法,该算法通过设置合理的原子门限进行原子2次筛选、引入回溯步骤并设置噪声下的迭代条件,应用于稀疏浅海信道OFDM系统,实验表明提高了信道估计精度,通过降低算法计算量缩短了估计时间,使用较少导频提高了频谱利用率,并且该算法原子选择数受稀疏度影响较小,同时算法的鲁棒性也得到提升。 该算法虽然降低了对稀疏度的依赖性,但实际水声信道稀疏度是未知参数,因此下一步针对稀疏度估计方式和自适应信道估计算法展开研究,结合浅海水声信道的时变性,信道估计准确性和时效性也有待进一步提高。
2 GOMP算法和TB-GOMP算法
2.1 GOMP算法
2.2 TB-GOMP算法

3 仿真结果及分析
3.1 实验参数设置



3.2 实验结果和性能分析



4 结论
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
中国西部(2021年4期)2021-11-04
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
系统工程与电子技术(2016年7期)2016-08-21
电信科学(2016年9期)2016-06-15
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
湖湘论坛(2015年3期)2015-12-01
电子设计工程(2015年8期)2015-02-27