我国空间站出舱活动通用设计和实施技术
2023-05-31 09:05:56李学东谢圆朱光辰
航天器工程 2023年2期
李学东 谢圆 朱光辰
(1 北京空间飞行器总体设计部,北京 100094)(2 北京航天飞行控制中心,北京 100094)
航天员出舱活动是载人航天技术的重要组成部分,是最具载人航天特点的航天飞行任务。作为大型多舱段复杂构型航天器,空间站要实现长期在轨可靠、安全、稳定运行,必须具备在轨组装及维修维护能力,需要航天员出舱完成一系列舱外操作任务,如大型组件装配、寿命到期部件更换、故障件维修、舱外有效载荷照料等。尽管近年来机械臂技术和人工智能术有了长足进步,但仍不能代替大量复杂精细作业所需的实时观察、判断、决策、执行能力和人的主观能动性,航天员出舱活动仍是支持空间站运行、扩展空间站应用服务不可或缺的关键技术[1-2]。
2008年9月25日,我国神舟七号载人飞船发射升空;9月27日航天员翟志刚在刘伯明协助下从气闸舱实现了我国第1次在轨出舱活动。通过神舟七号载人飞船在轨任务,我国突破了出舱任务气闸舱过闸和部分舱外操作的关键技术,但属于单航天器出舱功能验证飞行,未涉及执行航天器组合体舱外操作任务,尚未突破和掌握全部的舱外转移和操作技术并形成系统、完整的出舱系统设计方案,航天员未开展对舱外设备的复杂操作。我国空间站出舱任务主要面向空间站舱外设备和载荷的组装和维修,出舱活动技术主要包括气闸舱技术、舱外活动支持技术、舱外航天服支持技术、通信照明保障技术等。空间站出舱技术具有工作模式多样、出舱时间长、活动范围大、分系统参与性和耦合性强等特点[3-5],由此也引入了机械臂支持、资源可重复利用、舱外Wi-Fi无线通信等新技术。
本文按照我国空间站出舱活动技术方案设计要素,分别介绍了任务目标、详细技术方案设计和主要技术特点,并对出舱活动技术在天宫空间站的多次任务实施进行了总结,对未来技术应用方向提出了展望。
1 出舱活动任务目标及系统级设计
根据我国空间站任务规划,出舱活动任务可分为五大类,具体任务包括:①空间站平台的大型结构组装装配;②舱外设备维护维修;③航天员参与的舱外科学试验;④航天员舱外情况监测;⑤出舱活动技术验证[6]。
我国空间站(构型见图1)在继承神舟七号载人飞船出舱经验的基础上,结合空间站任务需求,在出舱活动系统设计能力、舱外作业任务规划、舱外活动辅助支持等方面进行了长期、多次出舱任务的系统级设计。
(1)提出以气闸舱集成设计和舱外不同任务通用化设计为基础的出舱系统总体设计方案,解决空间站多舱段、多任务、工作模式多样和多系统协同的出舱强耦合问题,实现气体复用技术在我国载人航天领域的首次在轨应用。
(2)国内首次建立出舱任务全流程地面验证体系,包括系统级3维人-服-舱仿真验证、航天器紧凑空间约束下的过闸布局验证、出舱全流程安全性验证、低压环境验证、微重力环境下可操作性验证等,解决了航天员在出舱任务中空间约束、保障约束、天地差异大、安全性要求高等一系列难题。
(3)提出一种机械臂转移航天员和航天员自主转移相结合的快速转移方法,满足多舱段、多任务舱外工作点在既定时间约束下解决航天员跨舱段大范围转移、在工作点体位固定及维修设备转移的三大难题。
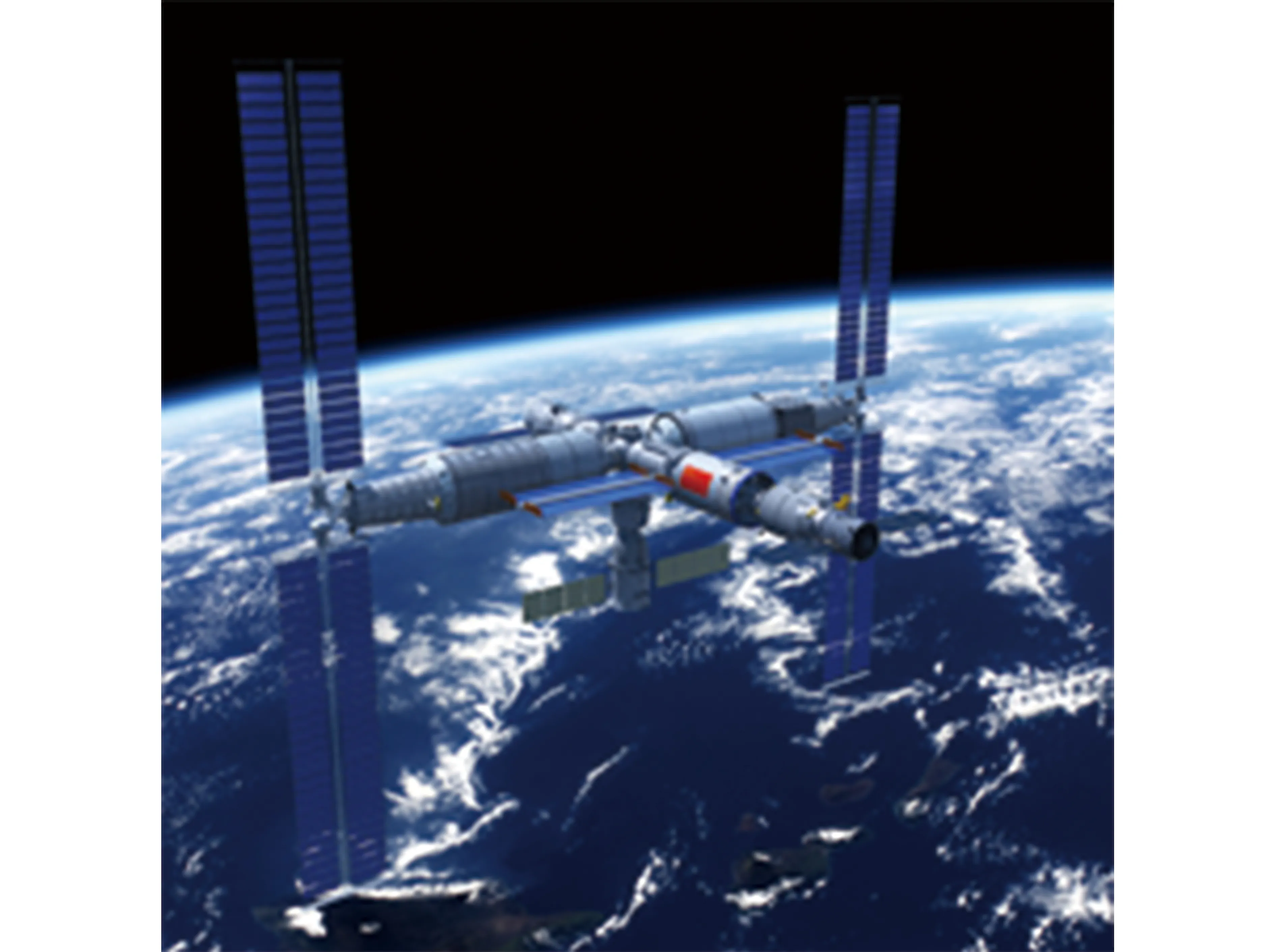
图1 天宫空间站Fig.1 Tiangong space station
2 出舱活动通用设计和实施技术
我国出舱活动技术主要包括航天员每次任务固定的通用技术和针对不同任务存在差异的实施技术。通用技术主要包括航天员过闸的气闸舱系统设计、出舱活动通用设备设计、出舱活动通信监视保障技术和舱外服系统设计;实施技术主要包括不同任务的水下试验验证技术、出舱任务舱外转移技术及在轨验证技术。
2.1 气闸舱系统设计
气闸舱是航天员从舱内载人环境进入真空的太空环境的过渡舱段[7]。气闸舱的主要功能包括:提供2名航天员穿脱舱外服的空间和助力装置,以及泄压至真空确保航天员可以打开舱门进入太空。现役的具备开展航天员出舱任务的飞行器包括我国研制的天宫空间站和美国牵头研制的“国际空间站”。“国际空间站”现有2个气闸舱,即探索号联合气闸舱(构型见图2和图3,可供美俄2种型号的航天服共同使用)和星辰号气闸对接舱(仅支持俄罗斯航天服出舱)。探索号气闸舱约4.25m3,仅支持2名穿着舱外服的航天员过闸。航天员穿脱舱外服与设备过闸均不在气闸舱进行[8]。
各类飞行器支持航天员出舱的气闸舱如表1所示。空间站长期在轨使用专用的气闸舱,包括外挂和实验舱携带2种形式,但其位置必然都位于密封舱的端部。
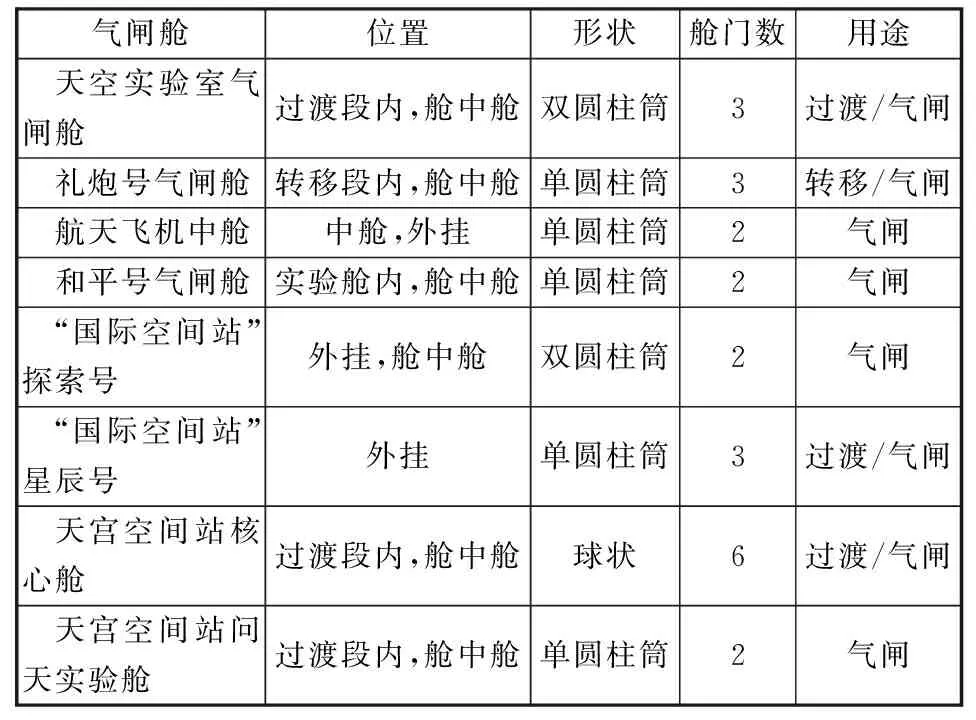
表1 气闸舱能力Table 1 Capabilities of airlock module

图2 探索号联合气闸舱Fig.2 Quest joint airlock module

图3 探索号联合气闸舱舱内视角Fig.3 Inside view of Quest joint airlock module
2.1.1 我国气闸舱配置情况
我国空间站配备了2个气闸舱,分别属于核心舱和问天实验舱。不同于“国际空间站”2个气闸舱只能分别支持美国舱外服和俄罗斯舱外服过闸,我国2个气闸舱均可支持飞天舱外服开展出舱任务。在出舱过程中,节点舱舱载支持设备均保持加电状态,当问天气闸舱出现不可返回的极端工况,航天员可通过核心舱的节点舱安全返回密封舱。其中,核心舱的节点舱可为航天员提供7.4m3的容身空间,问天实验舱的气闸舱可提供10m3。航天员穿脱舱外服与过闸,以及标准尺寸的设备过闸均在气闸舱,气闸舱兼作舱外服组装、检查、测试、贮存和着装场所,容积较大。
2.1.2 气闸舱布局设计
我国问天气闸舱可为航天员提供10m3的容身空间。针对航天员穿脱舱外服与过闸的容身要求,以及标准尺寸设备过闸空间要求,对我国航天员穿着航天服状态下的身体包络、腿部、膝部和脚踝的活动自由度和航天员视域等数据作为输入建立Jack软件的动态模型(见图4),用每一步真实操作驱动数据开展数字仿真和利用舱外服在真实舱段验证的方法,完成气闸舱舱外服组装、检查、测试、贮存和着装场所的空间设计与验证。
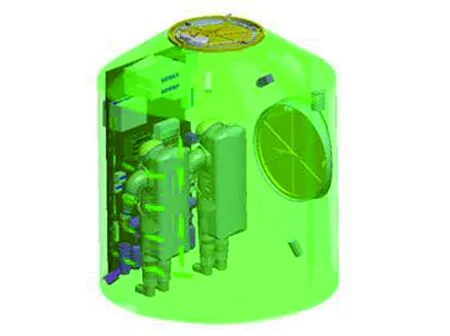
图4 航天员在气闸舱内操作仿真Fig.4 Simulation of astronaut operating in airlock module
2.1.3 气闸舱舱门开启助力设计
空间站气闸舱采用舱门开启助力设备设计,将神舟七号航天员在2kPa舱压下着舱外服手拉式开门方式改进成助力装置辅助泄压方式,开门操作力从500N降到100N以下。图5为航天员在轨打开气闸舱出舱舱门。

图5 航天员利用助力手柄打开出舱舱门Fig.5 An astronaut uses assisting handle to open hatch
2.1.4 泄复压系统设计
气闸舱泄复压功能旨在对气闸舱进行泄压与加压,满足气闸舱环境从舱内常压环境到真空环境双向过渡。在此期间,要配合航天员穿脱航天服,保护航天员安全过闸。
为解决密封舱泄压系统和复压系统均涉及到的出舱压控系统安全性难题,制定泄复压功能由泄压、复压2套系统互相独立设计的方法。泄压时,采用抽气的方式将气闸舱内的气体抽送至大舱;复压时,利用大舱进行复压,实现气闸舱部分气体的复用,以节省气体资源。图6为泄复压系统组成。

图6 泄复压系统组成Fig.6 Composition of pressure system
2.2 出舱活动舱外转移支持技术
2.2.1 机械臂支持转移和操作
航天员在舱外进行作业时,需要利用舱外脚限位器固定脚部,从而手部施力操作设备。空间站舱外操作项目均通过机械臂将航天员运送到工作地点,再利用机械臂上的脚限位器固定航天员脚部,航天员手部利用电动工具或徒手开展工作地点的维修任务。此种方式活动范围广,能够较快地到达工作地点,同时,机械臂上可以携带在轨更换设备(ORU)和维修工具,运送方便快捷,具有较高的效率。航天员和机械臂及相关设备关系见图7。
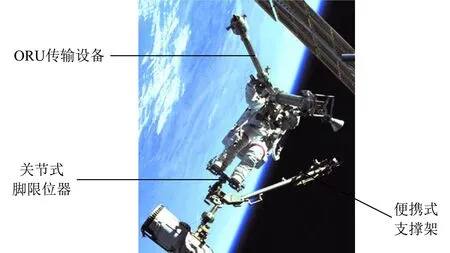
图7 机械臂转移航天员Fig.7 Robotic arm transferring an astronaut
2.2.2 自主转移和操作
为保证航天员安全完成舱外自主转移,空间站舱外自主转移转移路径覆盖所有操作点及机械臂适配器,确保舱外所有工作点均可达,保障发生任何故障时航天员均能转移至气闸舱。空间站舱壁表面设置出舱活动扶手(模型见图8),航天员身着航天服进行舱外活动时方便移位并且提供位置限定,具有系绳连接点能够适应系绳装置挂钩的使用。图9为2名航天员在水下利用舱壁扶手自主转移。
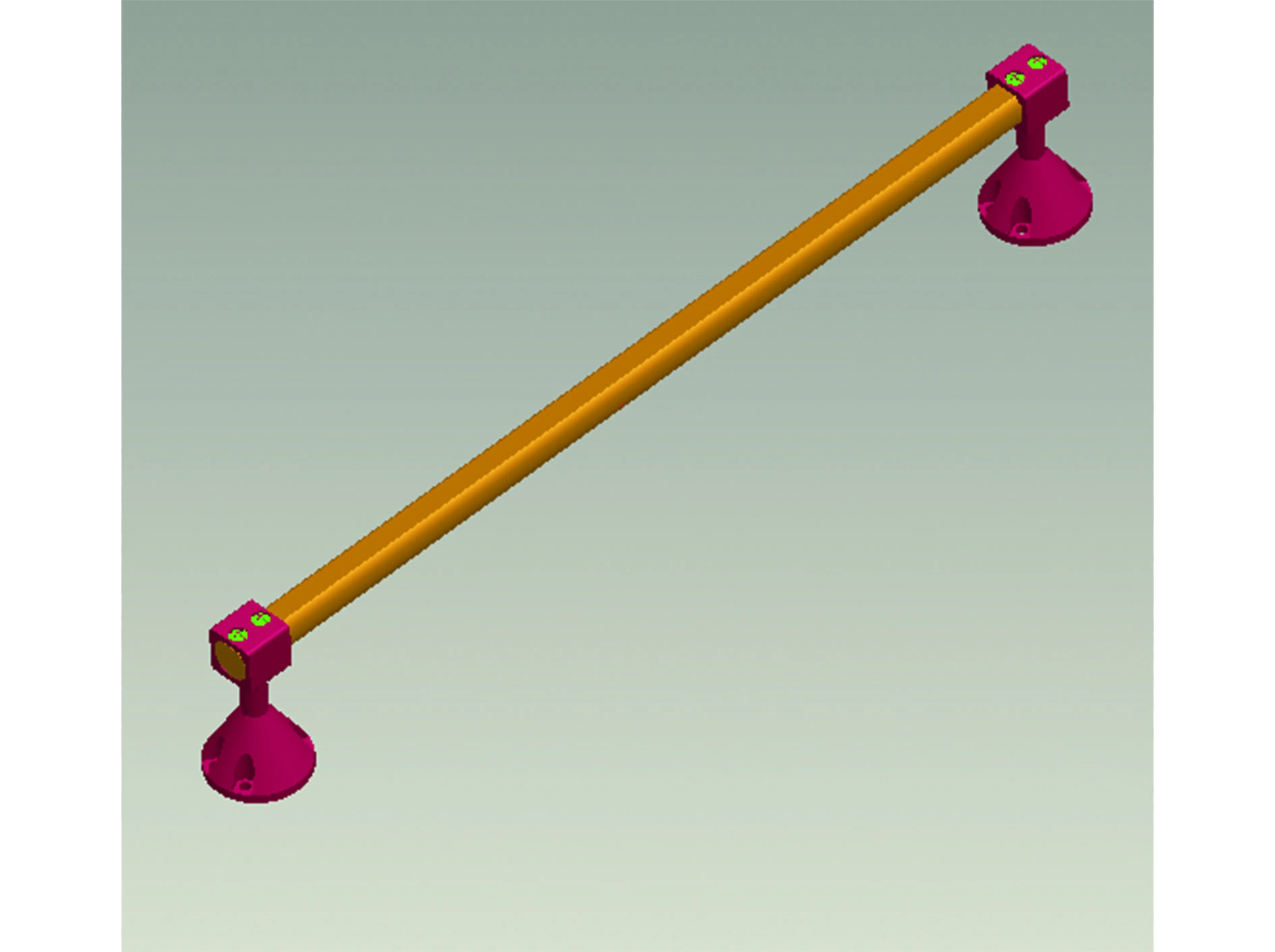
图8 转移扶手模型Fig.8 Model of a handrail
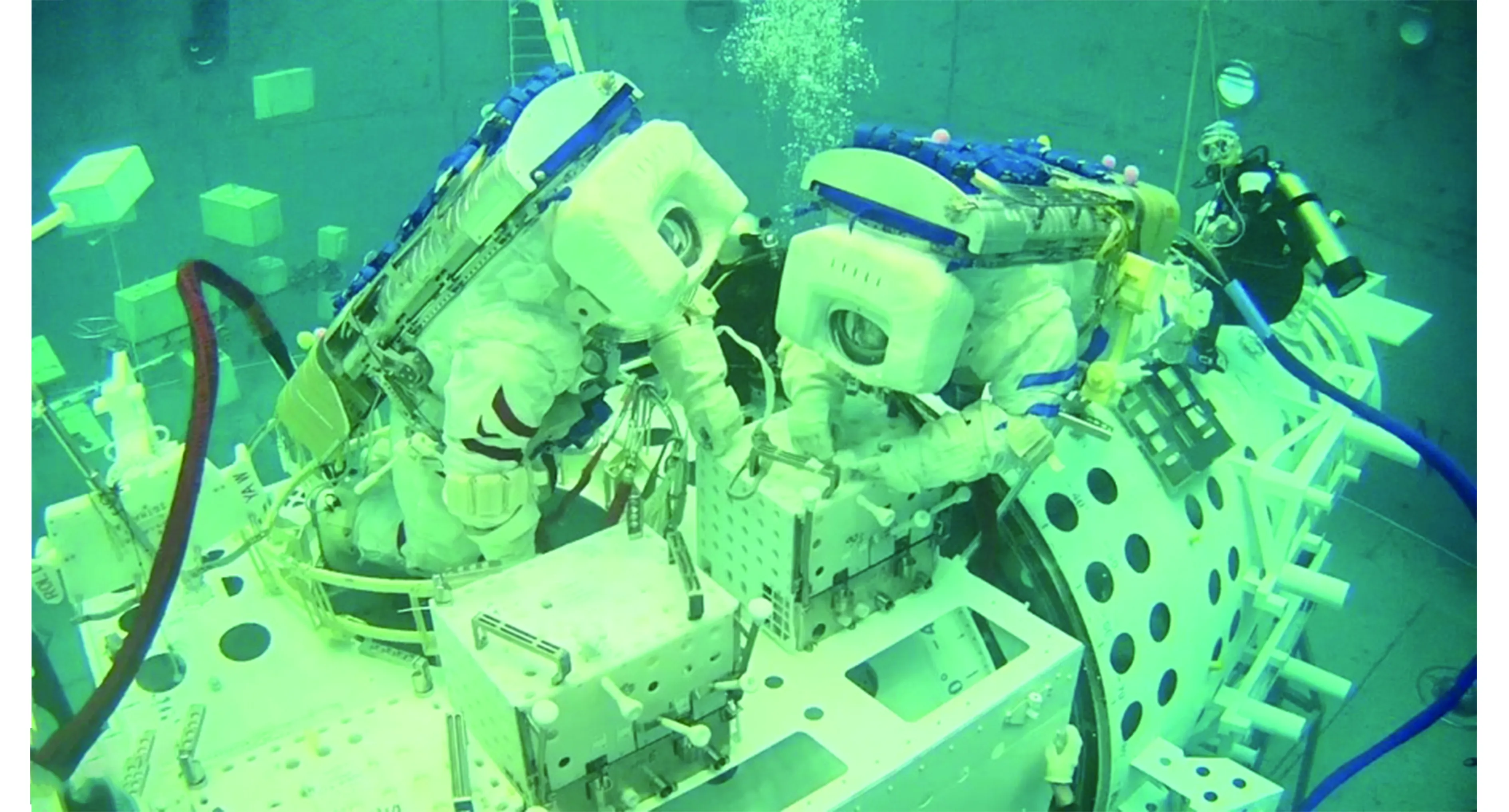
图9 航天员利用舱壁扶手转移的水下试验Fig.9 Astronaut transfer using handrails in an underwater test
2.3 出舱活动通用设备设计
空间站航天员执行出舱任务的工具及装置,长期重复使用的主要包括舱外电动工具、微型工作台、便携式关节脚限位器和舱外操作台。
电动工具由电机控制,以电池为能源,能够固紧、拆装螺钉,可以进行力矩、速度和旋转圈数的设定,能够方便航天员进行维修操作,减小航天员维修操作的工作量。电动工具组成见图10。
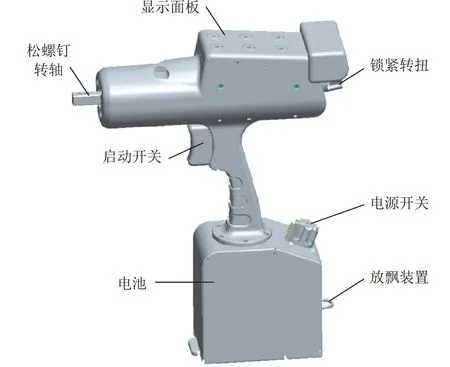
图10 出舱活动电动工具组成Fig.10 Composition of EVA electric tools
微型工作台(模型见图11)安装在航天员舱外航天服的前面。它安装在出舱服上,将电动工具和其他小工具固定,便于航天员携带操作工具出舱执行任务。
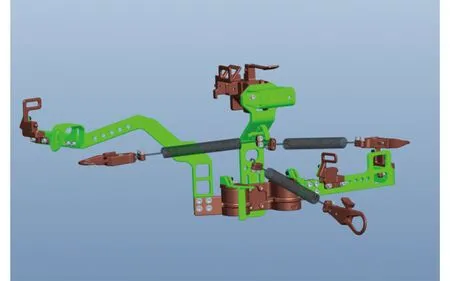
图11 出舱活动微型工作台Fig.11 Mini-workstation for EVA
关节式脚限位器(模型见图12)通过卡槽与机械臂或者空间站舱壁相连,根据任务需求,安装在不同的工位上。当航天员出舱工作固定在脚限位器上时,脚限位器为航天员提供刚性的限位,使其能稳定地工作。
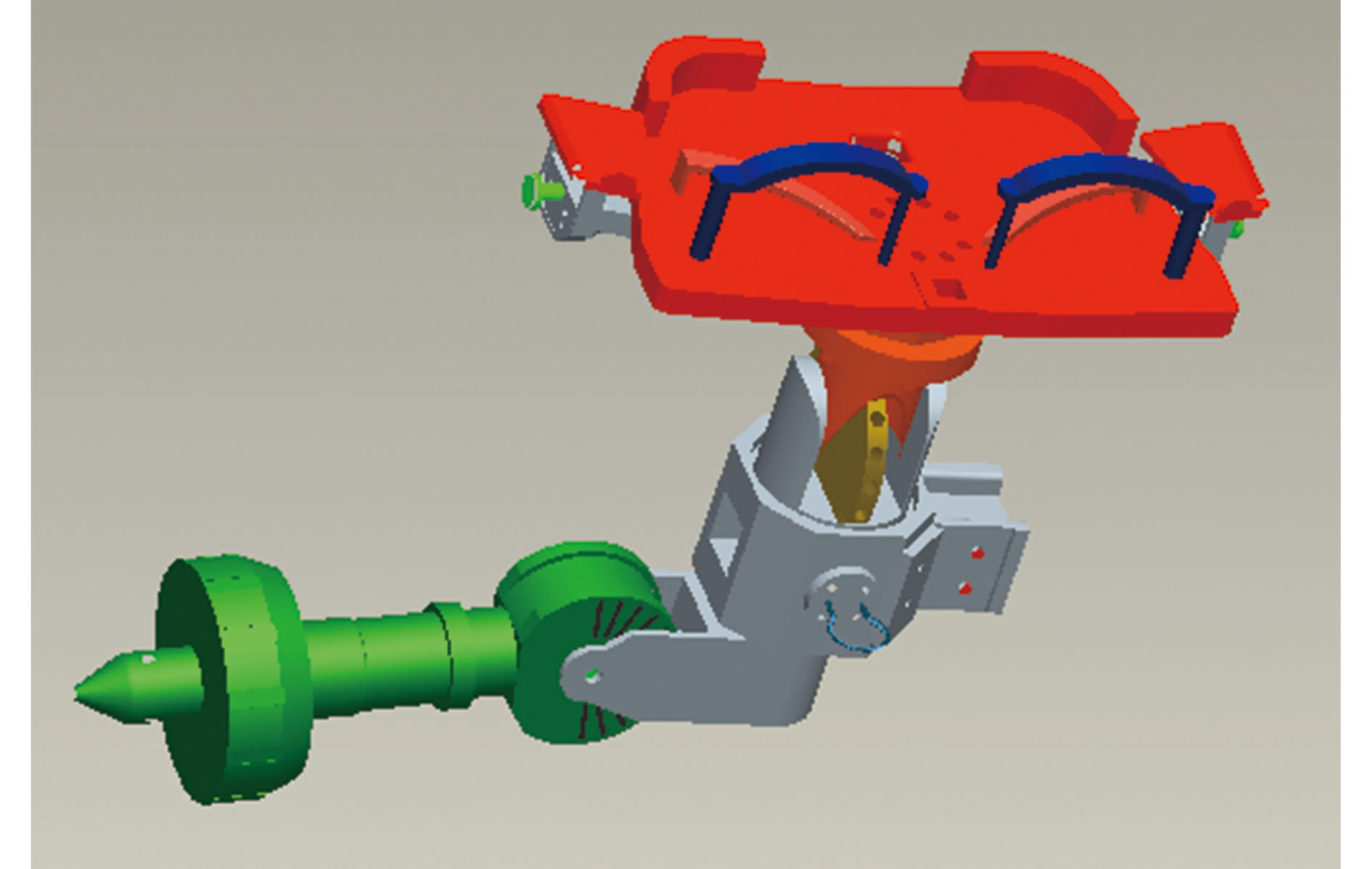
图12 关节式脚限位器Fig.12 Articulating portable foot restraint
舱外操作台(模型见图13)为机械臂上远距离传输设备提供取放空间接口,舱外操作台装到便携式脚限位器上以后可整体绕轴线±90°旋转,航天员在轨可根据实际情况组合使用。
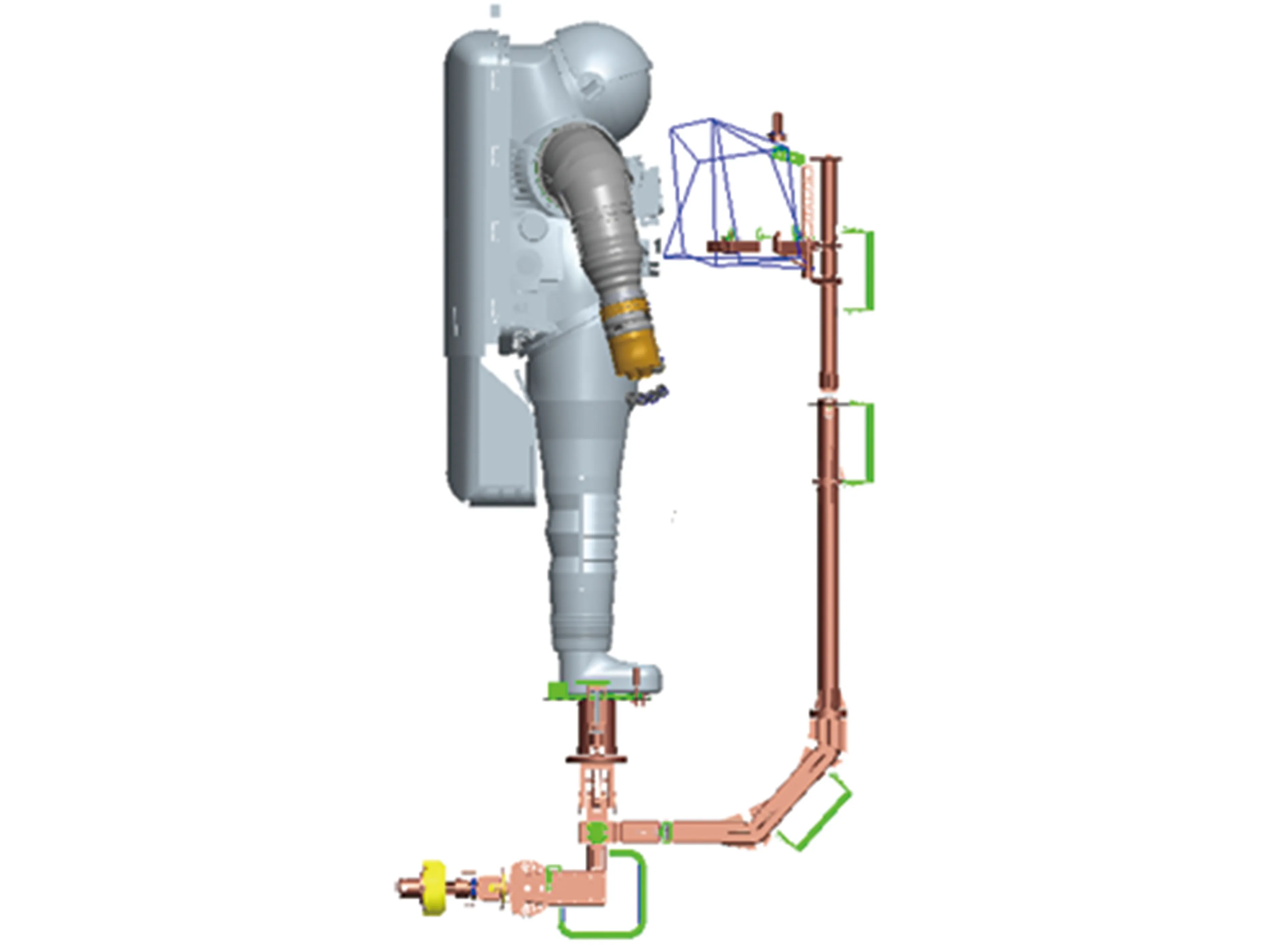
图13 舱外操作台使用图Fig.13 Diagram of extra-vehicular operation console
2.4 出舱活动通信监视保障技术
2.4.1 通信系统设计
空间站出舱通信系统主要包括有线通信、超高频(UHF)无线通信和Wi-Fi无线通信。其中,有线通信(脐带)和UHF无线通信能够实现出舱航天员与舱内航天员、地面的双向话音及生理遥测数据的传输,并经过了神舟七号载人飞船飞行任务的验证。
空间站出舱任务相比神舟七号载人飞船活动范围,存在信息传输范围大、机械臂上航天员转移速度快等特点。因此,打开舱门后,航天员即断开有线通信,舱外任务全程采用无线通信,舱外通信连接关系见图14。
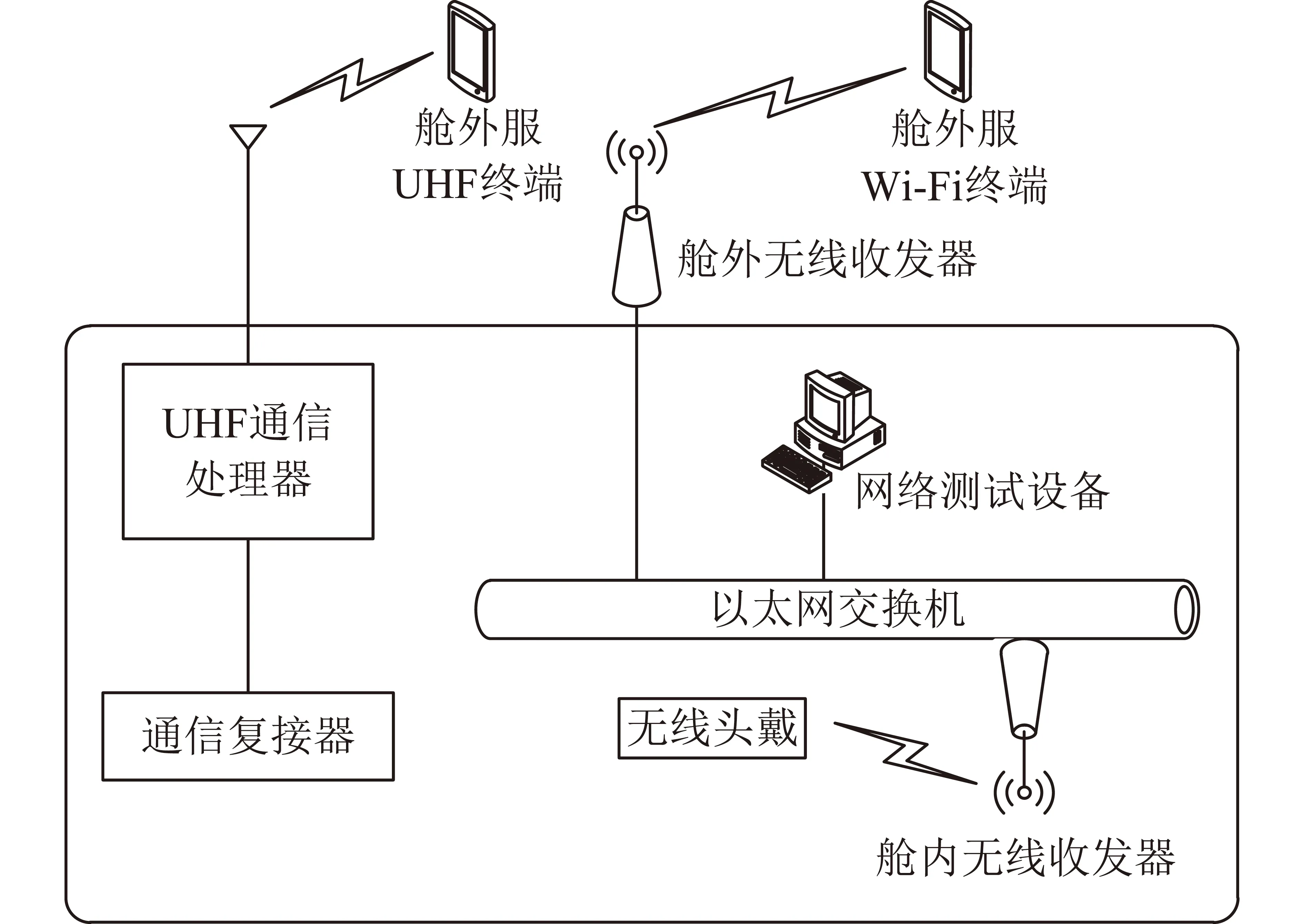
图14 舱外航天服与舱载通信设备连接关系Fig.14 Connection relationship between an EVA suit and onboard communications devices
为确保信息传输多通道下行,舱外服摄像机图像传输进密封舱及下行控制中心,空间站采用基于Wi-Fi技术的无线通信系统。空间站在核心舱舱外设计了3副Wi-Fi天线和3副UHF天线。在轨实测表明:航天员在舱外转移期间图像和舱外服数据均连续,舱外信号满足航天员转移和操作区域通信畅通。
2.4.2 视频系统设计
空间站2个气闸舱内均配置了航天员过闸过程进行实时监视摄像机;舱外配置了舱外照明系统和摄像监视系统,可全程跟踪航天员舱外活动,对出舱操作对象提供监视手段。图15为舱外照明系统照明仿真效果,图16为摄像监视系统监视效果。
图15 出舱活动照明仿真效果Fig.15 EVA lighting simulation effect
2.5 舱外服系统设计
空间站舱外服系统主要包括舱外服和舱外服相关支持装备,见图17。舱外服保障在空间站舱外开展任务的航天员的安全,舱载设备提供航天员穿着舱外服过闸过程的热、电、信息系统支持。航天员出舱用的舱外服包括服装面罩、服装相机和舱外服相机,航天员舱外执行任务时提供在舱外真空、高低温交变工况下的压力防护与热防护、环控生保、信息管理、话音通信和摄像等保障支持。出舱活动支持装备支持保障舱外服进出气闸舱期间的任务,由服装控制台、服装换热器和空间站内回路组成。
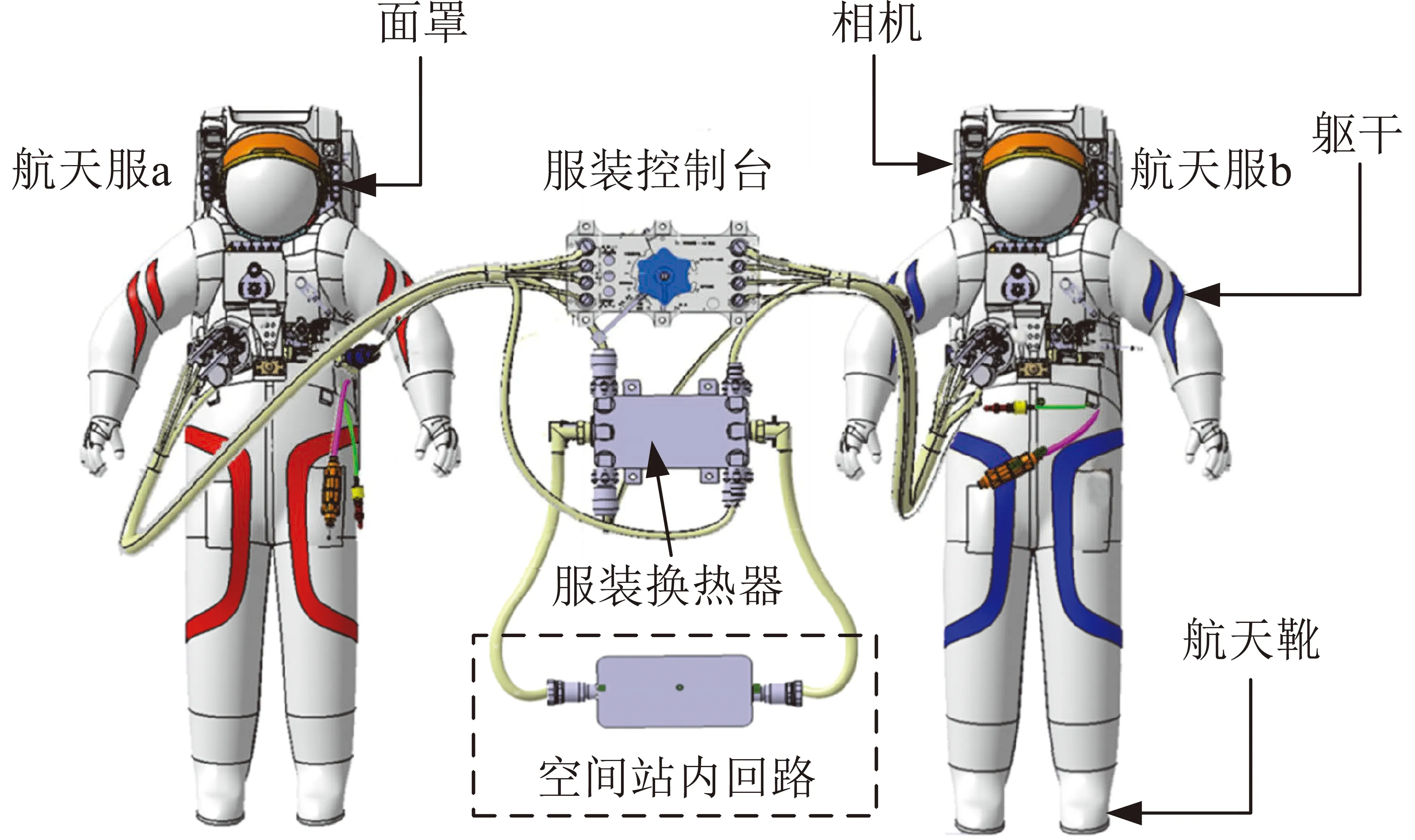
图17 舱外服系统组成Fig.17 Composition of EVA suit system
3 出舱活动主要技术特点分析
苏联/俄罗斯的和平号空间站在轨工作15年期间,36名航天员共计进行了80次出舱活动。现役的“国际空间站”,航天员可以从探索号联合气闸舱和星辰号气闸舱分别出舱,平均每年出舱10次左右,开展了大量的航天员出舱组装建造任务。我国空间站从2021年核心舱发射以来,通过11次出舱任务验证了出舱系统设计的可靠性和可行性。我国天宫空间站与神舟七号、和平号、“国际空间站”出舱活动能力对比见表2。可以看出:我国空间站机械臂在支持航天员过闸和舱外转移能力等关键指标上与国际一流水平相近[9-10]。
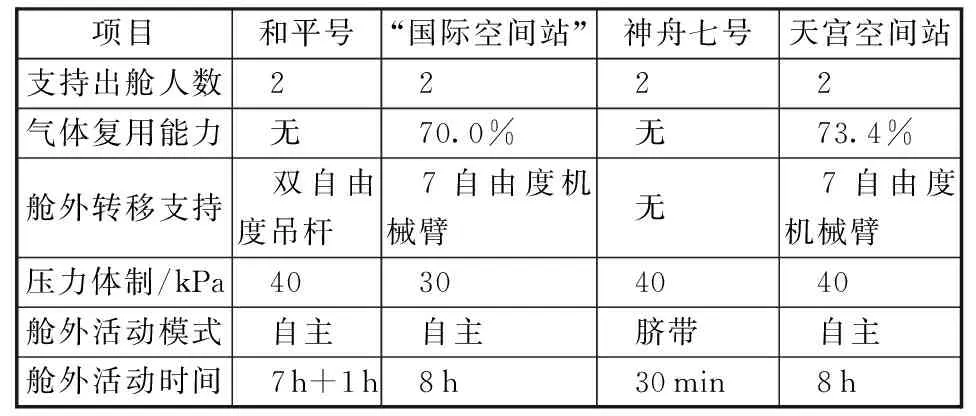
表2 出舱活动能力对比Table 2 Comparison of EVA capabilities
目前,我国空间站11次出舱任务中有4次是利用核心舱节点舱出舱,其余7次通过问天实验舱专用气闸舱出舱,航天员操作对象范围覆盖空间站3舱所有舱外操作位置。通过机械臂转移航天员和航天员自主转移相结合的快速转移方法,满足多舱段、多任务舱外工作点在既定时间约束下,解决航天员跨舱段大范围转移、在工作点体位固定及维修设备转移的三大难题。出舱气体复用率最大值达到了73.4%,优于“国际空间站”70.0%的气体复用能力,每年可节省约124kg气体,舱载支持设备和舱外服对航天员舱外活动保障时间约8h,远大于空间站各舱外操作任务的时间约束。出舱活动技术满足舱外设备和载荷照料要求,整体技术达到国际先进水平。
4 在轨应用和后续发展
将出舱活动通用设计与实施技术进行在轨应用,在空间站神舟十二至神舟十五乘组已经开展的11次出舱任务中,航天员按各次任务计划完成舱外全部预定任务,保障了空间站长期在轨驻留。其中,通过出舱任务完成的舱外扩展泵组的安装,将安装在资源舱内不可维修的外路泵组全部更换为可维修泵组,将各舱的回路寿命提高5年以上,安装过程见图18;全景相机的抬升,将相机的有用视场角由70°增加为90°,视场变化见图19。

图18 舱外扩展泵组的安装Fig.18 Installation of extra vehicular pumps
图19 全景相机抬升前后视场变化Fig.19 Field of view before and after panoramic camera lifting
本文提出的空间站面向多任务、复杂出舱活动通用设计与实施技术,是保证空间站组装建造及后续长期飞行15年任务顺利完成的保障,为航天员在多个航天器形成的组合体开展出舱任务提供了飞行试验数据,积累了宝贵经验。研究成果可直接应用在空间站后续舱段扩展、光学舱舱外维修任务及舱外科学实验设备舱外安装等任务中。系统的出舱活动方案设计方法也可推广到探月工程和行星际空间的航天员开展飞行器密封舱外操作任务中。
5 结束语
本文介绍了我国空间站出舱活动系统总体通用技术和实施技术设计,并与国外同类技术的关键参数进行了对标。天宫空间站在轨前11次出舱任务执行情况表明:空间站出舱通用技术和实施技术设计合理,有利地保证了空间站出舱活动的圆满成功,具有工程实用价值。未来随着载人探测任务需求的不断提升,出舱活动技术能够在更多的空间技术领域中得到应用。
猜你喜欢
军事文摘(2023年4期)2023-03-22 08:44:26
太空探索(2022年10期)2022-10-13 07:52:18
军事文摘(2022年8期)2022-05-25 13:29:16
珠江水运(2021年12期)2021-07-25 13:02:10
水运管理(2021年12期)2021-04-25 23:59:24
水运工程(2020年2期)2020-02-26 06:06:34
小哥白尼(趣味科学)(2019年10期)2020-01-18 09:16:14
军事文摘(2019年18期)2019-09-25 08:08:58
价值工程(2019年18期)2019-07-25 04:01:32
产业与科技论坛(2015年13期)2015-01-22 11:33:10