
基于空间模糊层次分析的航行环境风险评估
2023-05-30 10:48:04杜思雨谌颂程亮朱大明李泽明
贵州大学学报(自然科学版) 2023年3期
杜思雨 谌颂 程亮 朱大明 李泽明
摘 要:随着海上交通日益繁忙,保障船舶安全航行成为全球性重要议题。本文从航行自然环境和海上交通环境两方面构建航行环境风险评估模型,将地理空间技术和模糊层次分析法(fuzzy analytic hierarchy process,FAHP)结合,对厦门港及其周边海域的航行环境风险评估,形成风险分级图并对其空间分布特征进行分析。结果表明:受自然环境影响,该区域航行环境风险大致呈“U”型分布,风险等级沿“SW—NE”逐渐降低;在交通环境影响下,风险等级≥8级的区域呈散点状分布在距海岸线较远海域,尤其是兄弟屿东部海域;综合以上两方面,厦门港及其周边海域航行环境风险整体处于中等偏低风险,但仍有约6.17%的区域风险等级≥7级,主要分布在“南澎列岛—兄弟屿”连线的延长线以南和厦门湾海域。
关键词:航行环境风险;地理空间技术;模糊层次分析法;风险空间分布
中图分类号:P208;P732.1
文献标志码:A
文章编号 1000-5269(2023)03-0054-08
DOI:10.15958/j.cnki.gdxbzrb.2023.03.08
随着海上运输在全球货运、客运中占据着愈发重要的地位,船舶数量日渐增多,港口水域的运输压力日益加重 [1],从而导致近几年海上交通事故频繁发生,造成了严重的生命威胁和财物损失[2]。因此,航行风险评估是海上交通运输领域的重点研究课题。
航行风险评估主要从指标选取和权重确定方法两方面出发。根据评估的侧重点不同,评估指标的选取上也存在较大差异[3]。CARMEN等[4]主要针对航道环境对大型集装箱船的航行风险进行了评估。张新放等[5]通过分析船舶因素、管理因素和人为因素,建立了基于综合安全评估的指标体系。张青等[6]将重点放在气象因素的研究,对在不良天气下航行的船舶航行有着一定的指导意义。李振福等[7]从政治、經济、社会方面对北极航行风险进行了评估。在评估方法的选取上,1998年,马会等[8]最先将灰色聚类和灰色统计结合起来对航道危险度进行了综合评估。陈尧等[9]将模糊数学引入层次分析法中,利用模糊层次分析法对仰光河航道风险进行了综合评价。王晨等[10]建立了基于逼近理想解排序法(technique for order preference by similarity to ideal solution,TOPSIS)的航道引航风险评估模型对长江江苏段4段航道的引航环境风险进行了评价。以上研究多由观测和统计数据确定评估指标参数,缺乏一定的客观性,并且尚未考虑航行风险等级的空间差异,评估结果大多呈现为抽象的分值,并不能直观地反映研究区的风险等级空间分布情况。
近年来,遥感、全球卫星导航定位(global positioning system,GPS)等地理大数据的日益增多,给海上航行风险提供了新视角。李振福等[11]通过船舶地理数据提取船舶的自身属性对“21世纪海上丝绸之路”的航行风险进行了评估。甄荣等[12]通过地理大数据研究了一种用于海上交通监控管理的船舶会遇计算方法。然而,已有文献对这些数据的量化形式缺乏详尽考虑。
基于此,本文将地理空间技术和模糊层次分析法相结合,基于海洋环境和船舶自动识别系统(Automatic Identification System,AIS)地理大数据, 从航行自然环境和海上交通环境两个方面构建航行环境风险评估模型,并以厦门港及其周边海域为例,对其航行环境风险进行评估,实现风险等级空间分布的可视化,为船舶安全航行提供直观的参考依据。
1 研究区和数据
1.1 研究区概况
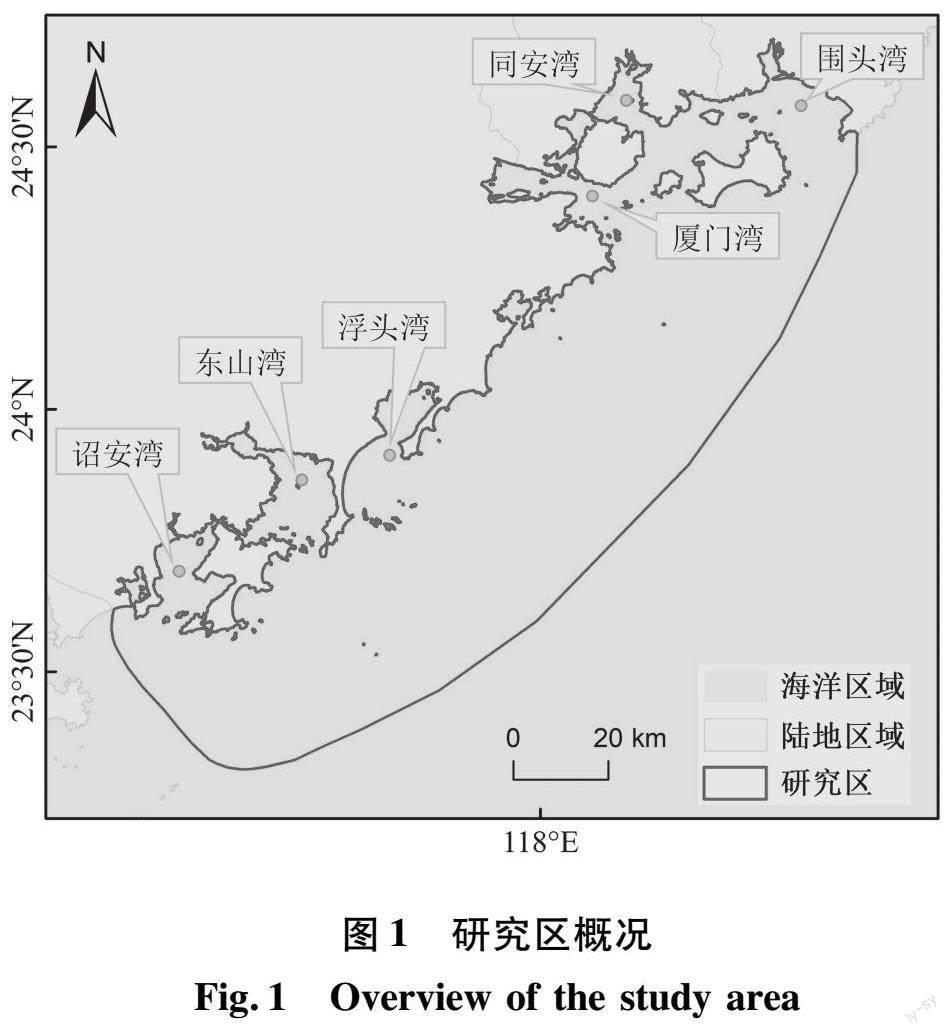
厦门港位于中国福建省东南部,是中国东南国际航运中心、全国综合运输体系的重要枢纽,也是闽南、闽西的主要出海口岸[13]。港口辖区包含厦门市(东渡、海沧、翔安)和漳州市(招银、后石、石码、古雷、东山、诏安)的九大港区。2021年,厦门港集装箱吞吐量达1 205万标箱,成为全球第十三大港口。2022年,增加集装箱班轮航线,总计达到162条,港口调度和交通压力明显增大,船舶航行所面临的风险也愈来愈大[14]。据中华人民共和国厦门海事局(http://port.xm.gov.cn/)发布的报告统计得,自2020起,辖区内发生不同程度的事故和险情共计53次,造成了不同程度的损失。厦门港地处东南亚热带季风区,季节性特征较为典型;沿海多雾且多为平流雾,每年的2月至5月为海雾多发期,雾数日占全年的60%以上;降水主要集中在每年的 5月至10月,其中,6月降雨量最大[15]。本文将厦门港及其周边海域作为研究区,如图1所示。
1.2 数据概况及预处理
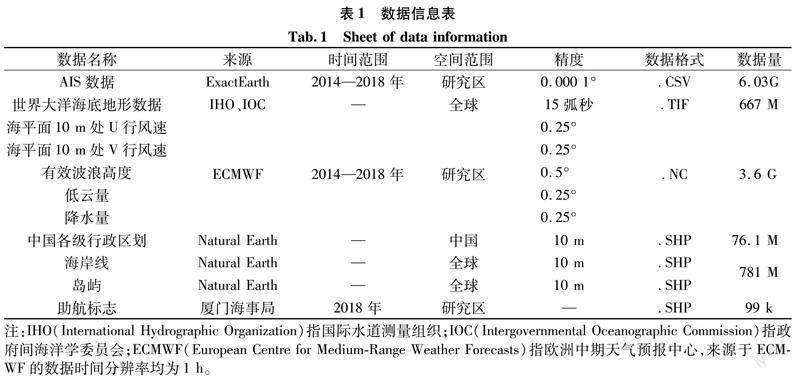
本文所使用到的数据主要包括船舶航行数据、海洋环境数据两类,数据相关信息见表1。
AIS数据可以客观准确地获取船舶的航行信息和轨迹点位的空间分布,但是由于AIS数据中部分属性需要人工输入,所以不可避免地会出现错误。因此,为了保证数据质量,确保后续试验的准确性和客观性,从字段属性值和空间分布角度对AIS进行缺失值补充、错误值去除或更新 [16]。海洋环境数据为.NC格式的文件,需要进行预处理。首先将.NC文件全部转为.TIF文件后,把所有.TIF文件重采样至15弧秒,并裁剪至研究区范围。最后将所有数据统一转换至WGS-84坐标系。
2 研究方法
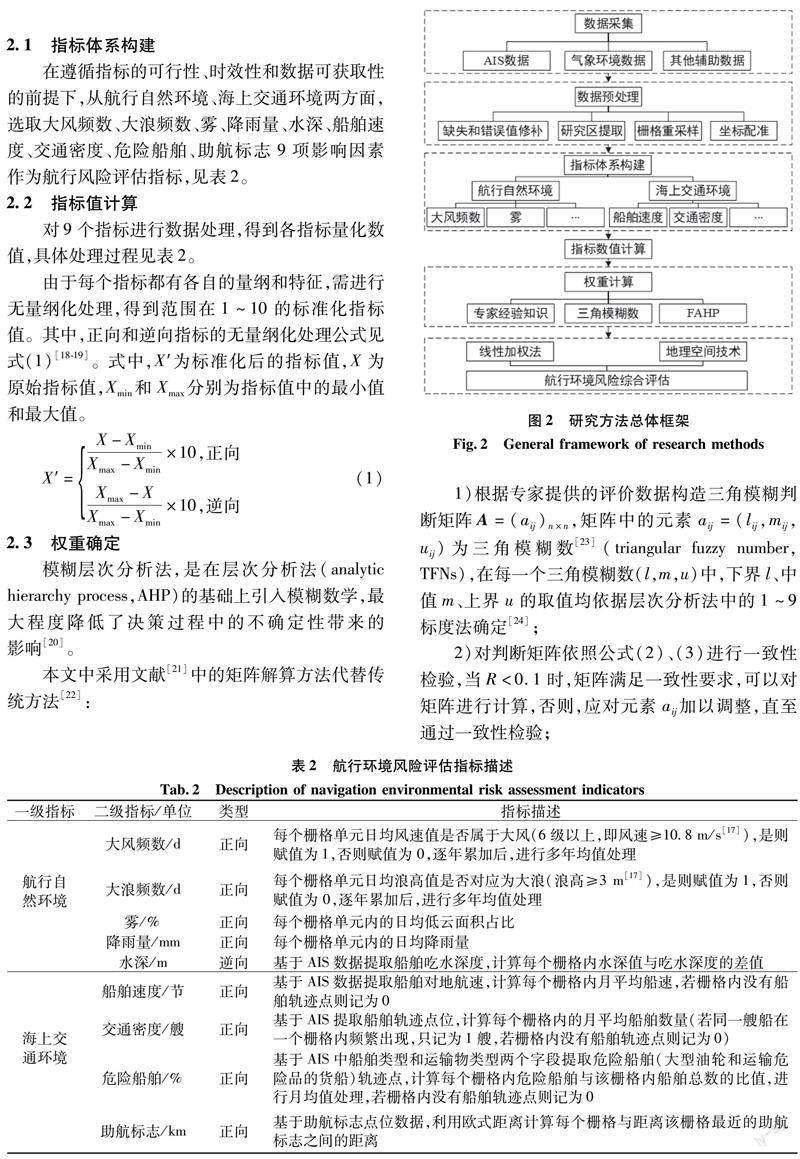
从航行自然环境和海上交通环境两方面构建评估指标体系,用模糊层析分析法确定权重,利用线性加权和地理空间技术对厦门港及其周边海域的航行环境风险进行评估,如图2所示。
2.1 指标体系构建
在遵循指标的可行性、时效性和数据可获取性的前提下,从航行自然环境、海上交通环境两方面,选取大风频数、大浪频数、雾、降雨量、水深、船舶速度、交通密度、危险船舶、助航标志 9项影响因素作为航行风险评估指标,见表2。
2.2 指标值计算
对9个指标进行数据处理,得到各指标量化数值,具体处理过程见表2。
由于每个指标都有各自的量纲和特征,需进行无量纲化处理,得到范围在1~10的标准化指标值。其中,正向和逆向指标的无量纲化处理公式见式(1)[18-19]。式中,X′为标准化后的指标值,X为原始指标值,Xmin和Xmax分别为指标值中的最小值和最大值。
2.3 权重确定
模糊层次分析法,是在层次分析法(analytic hierarchy process,AHP)的基础上引入模糊数学,最大程度降低了决策过程中的不确定性带来的影响[20]。
本文中采用文献[21]中的矩阵解算方法代替传统方法[22]:
1)根据专家提供的评价数据构造三角模糊判断矩阵A=(aij)n×n,矩阵中的元素aij=(lij,mij,uij)为三角模糊数[23](triangular fuzzy number,TFNs),在每一个三角模糊数(l,m,u)中,下界l、中值m、上界u的取值均依据层次分析法中的1~9标度法确定[24];
2)对判断矩阵依照公式(2)、(3)进行一致性检验,当R<0.1时,矩阵满足一致性要求,可以对矩阵进行计算,否则,应对元素aij加以调整,直至通过一致性检验;
式中,C表示偏离一致性指标,I为随机一致性指标,λmax表示矩阵的最大特征根;
3)构建模糊评判因子矩阵E,并计算调整判断矩阵Q,如式(4)。其中,mij为三角模糊中值;
4)将矩阵Q按列转化为对角线为1的判断矩阵;
5)计算矩阵内每行元素的n次方根,并对该数值进行归一化处理,即得到每项指标的权重值。
2.4 风险量化分级
通过线性加权得到航行环境的风险值,如式(5)。利用相等间隔法将航行环境风险划分为10个等级,航行环境风险从1级到10级依次增高。
式中,Dk为第k个栅格单元的航行环境风险值;uik为指标i在第k个栅格单元中的指标值;Wi为指标i的权重值;n为指标的总个数。
3 评估结果與分析
3.1 指标计算结果
图3显示了各指标的空间分布特征。在航行自然环境方面,研究区远海水域极易受到大风、大浪的影响,从而影响船舶的操纵性,给船舶航行带来一定的风险,而近岸海域海雾覆盖面积和降雨量则高于远海水域,能见度不佳,会使船舶航行安全度大幅降低。在水深指标中,研究区近岸和岛屿处水深较浅,船舶航行会存在搁浅或触礁风险。在海上交通环境方面,研究区内船舶的航行速度整体较低,远海区域船速略高于近海区域。在交通密度指标中,研究区内的船舶主要集中在航道上,其中,东北部的进港航道和港口内部的船舶数量较多,交通密度较大时,很容易发生碰撞事故。对于危险船舶指标,研究区内大型油轮和运输危险物品的货船整体集中在“西南-东北”的近岸航道上,其中,风险较高的区域呈散点状分布在航道及航道以南。研究区内的助航标志主要沿航道走向分布,也会布设在入港处或者航道重要转向点处,供船舶定位、确定航向等,在该指标上,东南部的航行环境风险较高。
3.2 权重计算
为了保证权重的客观性、合理性,邀请三位海上交通安全领域相关的专家及教授,对各层级指标进行两两比较打分。在所有判断矩阵满足一致性条件(0.017 8~0.068 9)的情况下,利用模糊层次分析法计算得出指标权重。在航行自然环境中,水深的权重最高,为0.119 0。大浪频数和大风频数的权重分别为0.096 7和0.094 3。雾和降雨量对船舶航行的影响则相对较小,权重紧随大浪频数和大风频数之后,分别为0.089 1和0.074 9。在航行交通环境中,交通密度、助航标志和船舶速度的重要程度相当,分别为0.144 5、0.143 6和0.143 0。危险船舶的权重为0.094 9。
3.3 航行环境风险分析
根据线性加权法分别得到自然环境、交通环境影响下的航行环境风险等级分布和综合风险等级分布,如图4、图5所示。其中,受水深限制,大型船舶在水深不足9 m的海域航行时搁浅风险较大[25],通过叠置分析将水深小于9 m的区域划定为危险水深区(图5灰色区域)。对不同风险等级的分布面积进行占比统计,如图6所示。
1)自然环境影响:由图4(a)和图6(a)可知,在自然环境的影响下,研究区的航行环境风险等级整体呈“U”型分布,“U”字拐点可延伸到南澎列岛北侧海域,且风险等级自“U”字拐点起沿“SW—NE”依次降低。风险等级≥7级的区域占总面积的13.27%,主要分布在研究区西南部、诏安湾、厦门湾和同安湾。其中,风险等级≥9级的区域仅占1.85%,为“南澎列岛—兄弟屿”连线以南和同安湾以西的海域,大风、大浪频数高和水深条件不佳是分别导致这两个区域风险较高的主要原因。风险等级≤6级的区域分布范围最广,共占86.73%,主要分布在研究区中部海域。
2)海上交通环境影响:由图4(b)和图6(b)可知,在交通环境的影响下,研究区航行环境风险等级整体≤6级。风险等级处于1~5级的区域共占93.34%,主要分布在研究区各个港湾和航道上。风险等级处于6~8级的区域主要受交通密度影响,分布在主航道、厦门湾、围头湾海域,占6.54%。兄弟屿东部海域的风险等级整体处于5~7级,风险等级整体由兄弟屿东部最远处向海岸线方向递减,这种递减的趋势主要是由于助航标志的分布趋于密集,且船舶速度较低。风险等级≥8级的区域面积极小,仅占0.38%,主要呈散点状分布在距海岸线较远海域,尤其是兄弟屿东部海域,危险船舶占比较多且助航标志设立不完善是导致该区域风险较大的主要原因。
3)综合两方面影响:由图5和图6(c)分析得,在自然环境和交通环境的综合影响下,研究区的航行环境风险整体较低,且风险等级的空间分布格局大致呈现“SW—NE”逐渐降低。“南澎列岛—兄弟屿”连线的延长线以南和厦门湾海域航行环境风险等级偏高,达到7级及以上,面积占总研究区的6.17%。造成该区域风险等级较高的主要原因分别是大风、大浪频数较高和交通密度较大。其中,风险等级为8~10级的海域占比仅为1.62%,主要分布在研究区南部。但受交通环境影响,研究区内的交通情况整体较好且助航标志配备较为完善,在“南澎列岛—兄弟屿”连线的延长线以北区域的航行环境风险等级整体降低,大多处于5级及以下,面积占比共计73.7%。其中,东山湾、浮头湾处风险等级较低,而诏安湾、厦门湾、围头湾和同安湾周边风险等级相对略高。值得注意的是,危险水深区水深不足9 m,主要分布在近岸和岛屿附近海域,占总面积的12.17%,船舶在此区域内航行时搁浅风险较大。
4 結论
本文将地理空间技术与模糊层次分析相结合,从航行自然环境和海上交通环境两方面选取大风频数、大浪频数、水深、船舶速度、交通密度等9个指标建立船舶航行环境风险评估体系,对厦门港及其周边海域的航行环境进行风险评估,形成了综合航行自然环境和海上交通环境两方面的航行环境风险分级图,并分析了其空间分布特征。研究结果表明:
1)在自然环境影响下,厦门港及其周边海域的航行环境风险等级整体呈“U”型分布,且由西南向东北依次降低。风险等级较高的区域主要位于 “南澎列岛—兄弟屿”连线以南和同安湾以西。
2)在海上交通环境的影响下,厦门港及其周边海域的航行环境风险等级整体≤6级,仅有0.38%的区域风险等级≥8级,主要呈散点状分布在距海岸线较远区域,尤其是兄弟屿东部海域。
3)综合自然环境和交通环境两方面的影响,厦门港及其周边海域的航行环境整体处于中等偏低风险,“南澎列岛—兄弟屿”连线的延长线以南和厦门湾海域的航行环境风险呈现较高趋势。风险等级的空间分布格局大致呈“SW—NE”逐渐降低。其中,水深不足9 m的危险水深区搁浅风险较大,主要分布在近岸和岛屿附近海域。经统计得,研究区内航行环境风险等级≥7级的区域占总面积的6.17%,为偏高风险区。对于本研究识别出的高风险区域,建议完善引航标志的配置,加强日常巡逻措施,从而保障该区域的船舶航行安全。
本文着重对航行的环境风险进行评估,并获取了风险等级空间分布特征。在指标中尚未考虑海域沿岸国家相关政策、人为因素等软性指标,未来将在指标体系上进一步优化评估模型。
参考文献:
[1]GERLITZ L M, MEYER C. Small and medium-sized ports in the TEN-T network and nexus of europe's twin transition: the way towards sustainable and digital port service ecosystems[J]. Sustainability, 2021, 13(8): 4386.
[2] SABINE K, CHRISTIAAN H J. Evaluation of total risk exposure and insurance premiums in the maritime industry[J]. Transportation Research Part D, 2017, 54: 321-334.
[3] LUO M, SHIN S H. Half-century research developments in maritime accidents: Future directions[J]. Accid Anal Prev, 2016, 123: 448-460.
[4] CARMEN G, LEONARD D. Navgation safety assessment based on short term seakeeping limit criteria for a feeder type container ship of 1300 TEU[J]. Galati University Press, 2015, 38: 5-8.
[5] 张新放, 关克平. 船舶航行安全的影响因素及安全性评估研究[J]. 中国水运, 2015, 15(11): 50-52.
[6] 张青, 李建, 顾婷婷, 等. 江海联运船舶航行安全气象评价指标体系的建立与应用[J]. 中国水运, 2020(8): 27-29.
[7] 李振福, 史晓梅, 周玉涛. 北极航行外部环境风险评估[J]. 海洋经济, 2022, 12(1): 11-20.
[8] 马会, 吴兆麟. 港口航道水域操船环境危险度的综合评价[J]. 大连海事大学学报, 1998(3): 17-20.
[9] 陈尧, 肖英杰. 基于模糊综合评判方法的仰光河航道安全评估[J]. 上海海事大学学报, 2007(1): 50-56.
[10]王晨, 江福才, 马全党. 基于熵权TOPSIS模型的航道引航环境风险评价[J]. 安全与环境学报, 2016, 16(3): 33-37.
[11]李振福, 陈霄, 赵梓州. 基于AIS数据的“21世纪海上丝绸之路”航行安全风险评估[J]. 水利水电技术, 2021, 52(5): 1-12.
[12]甄荣, RIVEIRO M, 金永兴. 一种基于DBSCAN的船舶会遇实时识别方法[J]. 上海海事大学学报, 2018, 39(1): 1-5.
[13]任伟. 厦门港加快融入“一带一路”的路径探究[J]. 中国集体经济, 2022(1): 28-29.
[14]李振福, 史晓梅, 周玉涛. 北极航行外部环境风险评估[J]. 海洋经济, 2022, 12(4): 93-102.
[15]陈毅. 基于IWRAP和PAWSA模型的厦门港通航环境分析[D]. 厦门: 集美大学, 2019.
[16]郭昊. 基于AIS数据的轨迹段聚类方法研究[D]. 南京: 南京信息工程大学, 2021.
[17]汪恒, 兰培真. 区间直觉模糊集的港口水域船舶航行环境风险评价[J]. 中国航海, 2021, 44(2): 38-44,52.
[18]MUHAMMAD A H, STUART P, CHRIS R, et al. Assessing tropical cyclone risks using geospatial techniques[J]. Applied Geography, 2018, 98: 22-23.
[19]LI S P, GONG Q X, YANG S L. A sustainable, regional agricultural development measurement system based on dissipative structure theory and the entropy weight method: a case study in Chengdu, China[J]. Sustainability, 2019, 11(19): 5313.
[20]FAWAZ A, AHMED A, ASIF I K, et al. Evaluating security of big data through fuzzy based decision-making technique[J]. Computer Systems Science and Engineering, 2023, 44(1): 859-872.
[21]曹馨匀. 基于三角模糊层次分析法的重庆地区建筑低碳化评价指标体系研究[D]. 重庆: 重庆大学, 2014.
[22]CHANG D Y. Applications of the extent analysis method on fuzzy AHP[J]. European Journal of Operational Research, 1996, 95(3): 649-655.
[23]BHADRAN A, GIRISHBAI D, JESIYA N P, et al. A GIS based Fuzzy-AHP for delineating groundwater potential zones in tropical river basin, southern part of India[J]. Geosystems and Geoenvironment, 2022, 1(4): 10093.
[24]李志强, 徐斌, 王升, 等. 基于改进的AHP-SPA的边坡稳定性评价及工程应用[J]. 公路交通科技, 2022, 39(1): 56-64.
[25]HUANG J C, NIEH C Y, KUO H C. Risk assessment of ships maneuvering in an approaching channel based on AIS data[J]. Ocean Engineering, 2019, 173: 399-414.
(责任编辑:于慧梅)
Abstract: As the maritime traffic gets increasingly busy, ensuring the safe navigation of ships has become an important global issue. A risk assessment model of navigation environment from natural and maritime traffic is proposed in this paper. To evaluate the navigation risk of Xiamen Port and its surrounding areas, this study combines geographic space technology and fuzzy analytic hierarchy process (FAHP), forms the risk classification map and analyzes its spatial distribution characteristics. The results show that: Affected by the natural environment, the navigational environmental risks in this area are roughly distributed in a "U" shape, and the risk level gradually decreases from southwest to northeast. Under the influence of the traffic environment, the areas with risk greater than 8 level are scattered in the seas far from the coastline, especially in the eastern sea area of Brother Island. Taking the above two aspects into account, the overall risk of the navigation environment in Xiamen Port and its surrounding sea areas is moderately low. However, nearly 6.17% of the sea areas of Xiamen Port and its surrounding areas have the navigation risk greater than level 7, which is mainly distributed in the south of the extension of the “Nan Peng Islands-Brother Island” line and the Xiamen Bay waters.
Key words: navigation risk; geographic space technology; fuzzy analytic hierarchy process; spatial distribution of risk
基金项目:国家自然科学基金资助项目(42001401)
作者简介:杜思雨(1997—),女,在读硕士,研究方向:GIS应用、海上大數据挖掘分析,E-mail:631519737@qq.com.
*通讯作者:朱大明,E-mail:634617255@qq.com.
猜你喜欢
中国宝玉石(2021年5期)2021-11-18 07:42:32
疯狂英语·新读写(2021年6期)2021-08-05 07:49:10
石油化工建设(2020年1期)2020-08-24 07:02:02
中国航海(2019年2期)2019-07-24 08:26:46
中学生英语(2017年6期)2017-07-31 21:28:55
物流科技(2017年5期)2017-07-06 09:04:43
海洋信息技术与应用(2017年2期)2017-06-21 19:51:29
青年歌声(2017年6期)2017-03-13 00:57:56
港口经济(2016年12期)2016-03-17 00:49:30
中华海洋法学评论(2013年2期)2013-03-11 20:02:49
贵州大学学报(自然科学版)2023年3期