
全自动凝血分析仪STA R Max 的检测原理及典型故障分析
2023-05-24 12:25江鑫富韩威威
医疗装备 2023年9期
江鑫富,韩威威
惠州市中心人民医院 (广东 惠州 516001)
全自动凝血分析仪STA R Max 是一种临床检验类医疗设备,由样本管理系统、试剂管理系统、反应杯装载系统、加样系统、冲洗系统、测量系统、光学系统及温控系统等构成,利用摆动磁珠法(凝固法)和光学法原理对人类血浆进行凝血和纤溶相关测试,为临床诊断患者凝血功能提供可靠的支持。本文主要介绍了全自动凝血分析仪STA R Max 的检测原理、分析流程及结构,列举了仪器日常工作中常见的故障现象,详细阐述了故障分析及处理方法,以期为同行提供参考。
1 仪器检测原理
全自动凝血分析仪STA R Max 的检测原理包括摆动磁珠法和光学法两种。
1.1 摆动磁珠法
摆动磁珠法的原理是利用电感传感器测量反应杯中钢珠振幅的变化[1]。反应杯底部有两条曲线轨道(见图1),可以构成两个独立的驱动线圈,从而产生一种交变电磁场,使钢珠产生钟摆运动。当介质的黏度经钢珠运动保持稳定时,钢珠的振幅亦趋于不变。介质黏度越大,钢珠振幅越小。
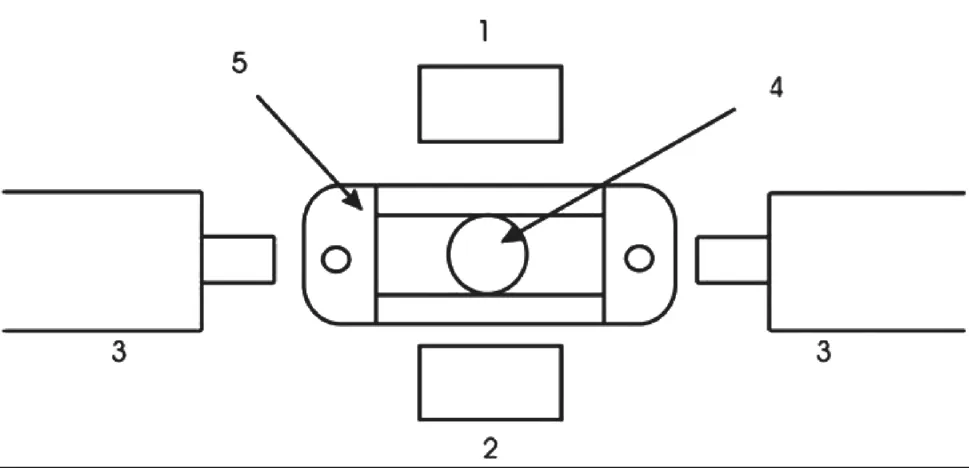
图1 摆动磁珠法原理示意图
磁场强度根据执行的分析项目(凝血酶原时间、活化部分凝血活酶时间等)及预计的凝固类型而变化。用于检测振幅的系统由两个测量线圈组成:发射线圈可以发射电磁场,接收线圈根据反应杯内部钢珠的位置接收信号。此算法根据磁场变化准确计算出振幅,从而确定钢珠的凝固时间(见图2)。
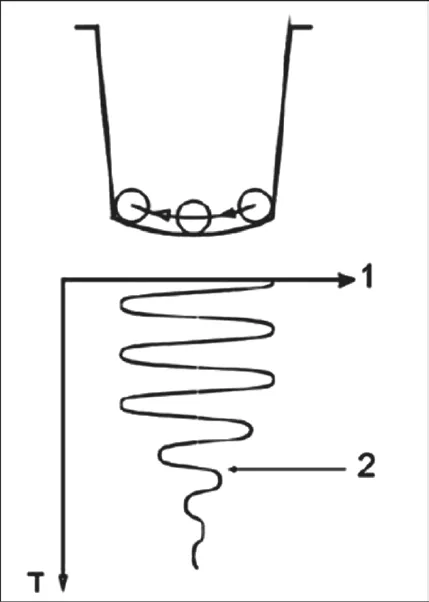
图2 钢珠振幅与凝固程度示意图
1.2 光学法
STA R Max 系统的光学法[2]检测原理包括发色底物法和免疫比浊法,在反应杯中可能发生酶促反应或免疫学反应。单色光(波长405 nm或540 nm)通过反应杯时被反应混合物部分吸收,通过检测透射光强度[3]计算所检测物质的浓度,具体检测原理见图3。由图3 可知,I1=I+Ip(第1 次检测时,打开入射光,I1为总透射光强度,I为入射光产生的透射光强度,Ip为杂散光产生的透射光强度);为消除杂散光的影响,需关闭入射光,并在间隔较短时间内进行第2 次检测,此时认为两次检测时杂散光产生的入射光强度相等,即I2=Ip;那么,从I1中减去I2即可得到I。吸光度(A)的计算公式为A=lg(I0/I),其中,I0为入射光强度;根据郎伯-比尔(Lambert-Beer)定律A=ε×l×c(A 为吸光度,ε 为摩尔消光系数,l 为光径,c 为浓度)即可测得检测物的浓度。
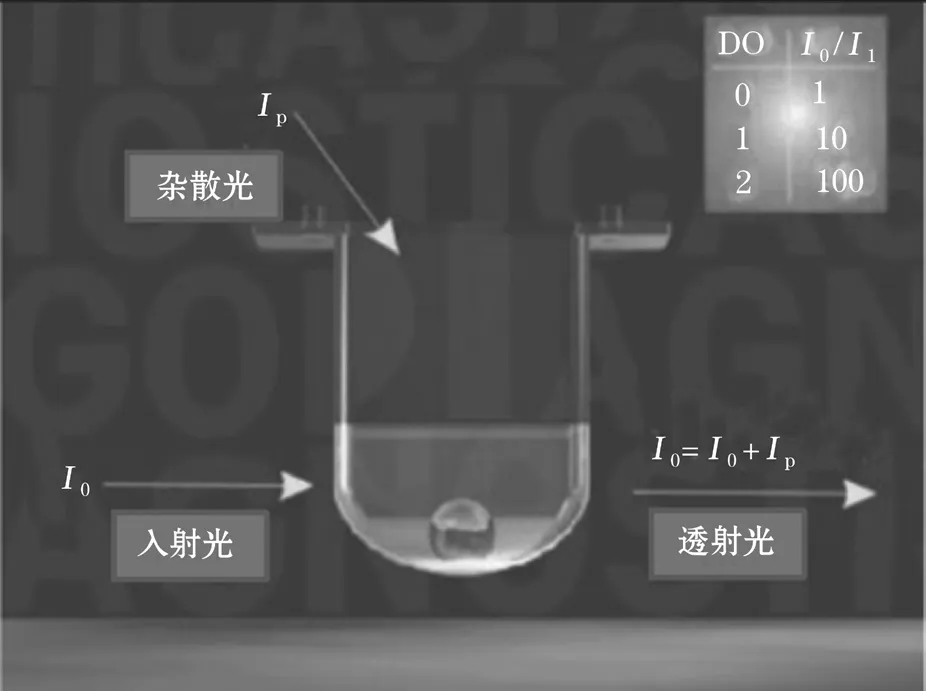
图3 吸光度测量原理示意图
2 仪器分析流程
样本离心后,试管被装载到试管架上,然后将试管架放入托盘,托盘存放在STA R Max 系统的装载/卸载区,仪器开始进样;条码枪扫描样本条码可得到实验室信息系统给出的相关项目检测指令,并保证系统将任何试管定位到全自动分析仪内;随后,试管架被移至吸样区;血浆(样本、质控品或校准品)由带有或不带有稀释液的1 号针吸取,然后被分配至反应杯中(小车停在样本站);如果需要中间试剂,则梭子停在试剂站,试剂由2 号针添加至反应杯中;然后小车停在检测站,由配备吸头的机械臂将反应杯传送至孵育区,在孵育时间用完前的几秒,反应杯由配备吸头的机械臂传送到检测区;第1次孵育后待分配的试剂(主要是启动试剂)由3 号针移液,当试剂预热到37 ℃时,试剂在3 号针的加热管中停留大约2 s;随后,预热或未经预热的试剂被添加到检测区对应的反应杯中;一旦检测结束,吸杯机械臂便吸取反应杯,将其放入反应杯废物桶。
3 样本处理部分的结构
全自动凝血分析仪STA R Max 样本处理涉及的模块主要包括样本装载模块、试剂抽屉、反应杯传送系统和孵育检测模块。
3.1 样本装载模块
样本装载模块分为吸样区和存储区,吸样区的样本可直接进行吸样,存储区用于样本缓冲。
3.2 试剂抽屉
试剂抽屉分为3 个区域:R0(校准品、质控品、稀释液、消除污染液)、R1(第1 次孵育前待分配的试剂、消除污染液)、R2(第1 次孵育后待分配的试剂、消除污染液),中间区和右边区的某些位置配备了储备区,用于放置磁搅拌棒进行搅拌。在装载前,通过扫描条形码标签识别各产品的试剂瓶,装载后,试剂瓶的位置由位置标识系统自动识别。需注意的是,执行分析所需的所有产品都必须装载到试剂抽屉内,产品温度由温控系统维持在15~19 ℃(冷空气循环)。
3.3 反应杯传送系统
全自动分析仪的反应杯盘一次最多可以装载1 000 个反应杯。反应杯由双皮带传送带逐个分配到反应杯小车中。在传送带皮带上,反应杯小车可被固定在停靠站,进行血浆或试剂分配,然后传送至孵育区或进行反应杯装载。
3.4 孵育检测模块
孵育区和检测区是同一模块的组成部分,由多层电阻系统将温度维持在(37±0.5)℃范围内。
4 故障实例
4.1 故障一
4.1.1 故障现象
仪器停止工作,提示“小车不存在,请进行紧急停止并重新启动”。
4.1.2 故障分析及处理提示“小车不存在”,则有可能是位置传感器故障或运输途中反应杯堆积导致小车运输时不能到达指定位置。反应杯由小车运输至相应的位置,进行加样或加试剂。运输途中的3 个位置可对反应杯进行状态感应,若小车应该位于某一位置,而传感器未感应到小车,仪器便会发出报警提示。打开仪器前盖,确认小车运输途中的3 个位置是否有小车,尤其需注意检查左侧转弯处是否有小车被卡住无法转弯。若以上情况皆未发生,则检查反应杯模块是否有反应杯重叠在小车上,若是,则清洁反应杯后重新复位;否则清洁或调换位置传感器,以排除位置传感器故障。
4.2 故障二
4.2.1 故障现象
检测结果出现异常。
4.2.2 故障分析及处理
首先对样本进行排查,发现样本正常,则可能为吸样问题;观察仪器吸样过程,发现1 号针吸样异常,无法正常吸取样本,故停止仪器;进入维修模式后,清洗1 号针,并清除针上残留的异物,然后将量杯放入1 号针下方,开始检测该针的打水量及压力情况;检测正常后再检测4 号臂的管路,并定位抓手位置;重复进行耐力测试后,仪器正常。
4.3 故障三
4.3.1 故障现象
提示“Y 轴位置状态未找到,X1 现3 次运动丢步报警”,最终报警“3595-256-13040”,仪器停止工作。
4.3.2 故障分析及处理
“Y 轴位置状态未找到,X1 现3 次运动丢步报警”,很有可能是感应Y 轴位置的数据线出现松脱、运动马达不工作、位置传感器有灰尘或故障。首先,检查1 号臂的排线接头情况,重新拔插1 号臂及背板上的排线接头,如PCX1、DC motor、com 3、4 和5 串口通信线,重新复位试机;若故障依旧,进入维护模式,清洁传感器,并对1号臂进行定位,若定位失败,可将机械臂位置控制模块的S 与R1整体对调,或将1号臂与2号臂的X、Y马达对调,或对调对应的驱动板以排除故障。
4.4 故障四
4.4.1 故障现象
机械臂3 无法进行DESORB 清洗,系统无法继续进行。
4.4.2 故障分析及处理
重新运行仪器,检查3 号臂情况,发现3 号臂一直在冲洗站中反复冲洗;停止仪器进入维修模式,查看3 号臂针头,发现针头有结晶,清洁后测试3 号臂及冲洗站,运行状态皆正常,复位后故障依旧;考虑到数据库未更新该机械臂信息,故关闭仪器,拔插MMC ARM3 板,并重启加载3 号臂数据,测试正常。
5 小结
本文详细介绍了全自动凝血分析仪STA R Max的检测原理、分析流程及结构,分享了4 例常见故障的处理案例。检验类大型医疗设备的结构相对复杂,通常包含电路、水路和气路,在使用设备时,操作人员应定期进行管路冲洗和机器质控,维修工程师应定期对设备做好预防性维护保养。只有熟练掌握设备的工作原理及结构,积累并总结维修经验,维修工程师才能更快、更有针对性地排除故障,使设备为临床提供更优质的服务。
猜你喜欢
机床与液压(2022年10期)2022-09-20
流程工业(2022年3期)2022-06-23
空间科学学报(2021年6期)2021-03-09
发明与创新·小学生(2018年1期)2018-02-02
发明与创新(2018年3期)2018-01-24
中成药(2017年9期)2017-12-19
中成药(2017年5期)2017-06-13
中国继续医学教育(2015年3期)2016-01-06
华南农业大学学报(2015年5期)2015-12-04
自动化博览(2014年12期)2014-02-28
