
M6 型射波刀的基本原理与平板探测器故障维修一例
2023-05-24 12:25叶淑华林伟通信作者石鑫马振然宫娜
医疗装备 2023年9期
叶淑华,林伟(通信作者),石鑫,马振然,宫娜
1 云南省肿瘤医院·昆明医科大学第三附属医院 (云南昆明 650118);2 中核安科锐(天津)医疗科技有限公司 (天津 300399);3 昆明医科大学第二附属医院 (云南 昆明650101)
恶性肿瘤是一种危及人类生命安全的疾病,放射治疗是其有效的治疗方式。近年来,立体定向放射外科系统(射波刀,Accuray 公司)相关技术取得了重大进步,其被应用于多种恶性肿瘤疾病患者的临床治疗中[1-2]。目前,国内已有超过30 台射波刀处于临床应用状态。射波刀机器人手臂可以在全空间范围内对恶性肿瘤进行360°的精准照射,不仅能提高疗效,还可减轻对邻近正常组织器官的损伤[3-4]。射波刀是美国斯坦福大学医学中心神经外科Dr John Adler 教授发明的新一代4D 放射外科设备。M6 型射波刀是目前的最新型号,其故障维修案例报道较少。现对我院一例M6 型射波刀平板探测器故障维修情况进行总结,以期为临床维护提供参考和借鉴。
1 M6 型射波刀的基本原理
M6 型射波刀的基本结构包含全数字化机器人治疗照射系统、标准动态追踪系统、Precision 治疗计划系统、iDMS 数据管理系统及质控设备附件。其中,核心硬件部分为全数字化机器人治疗照射系统,包括影像引导系统(诊断用kV 级X 光源、非晶硅X 光探测平板)、6 MeV 直线加速器、M6 机器人控制臂、限光筒套装(固定尺寸限光筒套装、可变孔径限光筒、多叶光栅准直器3 种治疗模式)、标准治疗床及治疗床控制台[5]。
M6 型射波刀整合了X 波段直线加速器和六维自动运动机器人控制臂,将直线加速器小型化后安装在机器人的控制手臂上,通过机器人手臂可以实现精准化、非共面和多中心的肿瘤照射,能够提供超过1 200 个放射束入射角[6],允许辐射射束从任意方位传输至靶区。影像引导技术能确保射线完全照射在肿瘤靶区,机械臂绕患者360°旋转,可从上千个不同角度照射肿瘤,并进行剂量大小调节,同时,实时定位追踪系统利于实现精准放射治疗,可局部大剂量杀灭肿瘤细胞,从而对全身肿瘤进行立体定向放射治疗。配合多种先进准直器独有的肿瘤追踪功能,可对运动肿瘤作实时、动态的三维剂量雕刻治疗,实现真正的精准放射治疗,同时可最大限度避免对周围危及器官和正常组织造成损伤[7]。
M6 型射波刀的突出优势是配置了最新研发的InCiseTM 多叶准直器CyberKnife 系统,这项新技术不仅扩展了CyberKnife 治疗患者的范围,还可将治疗时间从30~45 min 缩短至15~20 min。M6 型射波刀整合了连续影像引导、非等中心照射、非共面照射和多叶光栅准直器的射野适形优势,这些优势能使机器人在进行精确治疗时,有效避开正常组织,端到端的精度可达亚毫米级别,甚至在呼吸运动导致靶区相应运动的情况下亦可维持此精度[8-9]。M6 型射波刀具有超高精度,且可更好地保护正常组织,因此,其可高效地治疗以往使用放射外科治疗技术无法治愈的肿瘤,极大地扩展了治疗范围。
2 射波刀系统平板探测器故障维修一例
2.1 故障现象
M6型射波刀平板探测器在追踪或匹配图像时,操作技师发现横向或竖向整片区域缺失。
2.2 故障分析
射波刀平板探测器(非晶硅X 光探测平板)的组件构成见图1。其工作原理为:由玻璃基材上蚀刻a-Si TFT 和光敏光电二极管作为可见光感光元件,碘化铯闪烁体将不可见X 线转化为可见光发光体,配合诊断kV 级X 光源,接收经过人体的X 线,全程实时定位病灶影像(见图2)。数字平板探测器组件由极敏感传感器系统构成,不仅需经受kV 级球管直接照射,还有6 MeV 高能射线直接或间接的射束及散射线穿透整个平板探测器,导致传感器本身、信号模数(analog-to-digital,AD)转换及数字传输控制芯片失效,无法生成完整的影像图片。
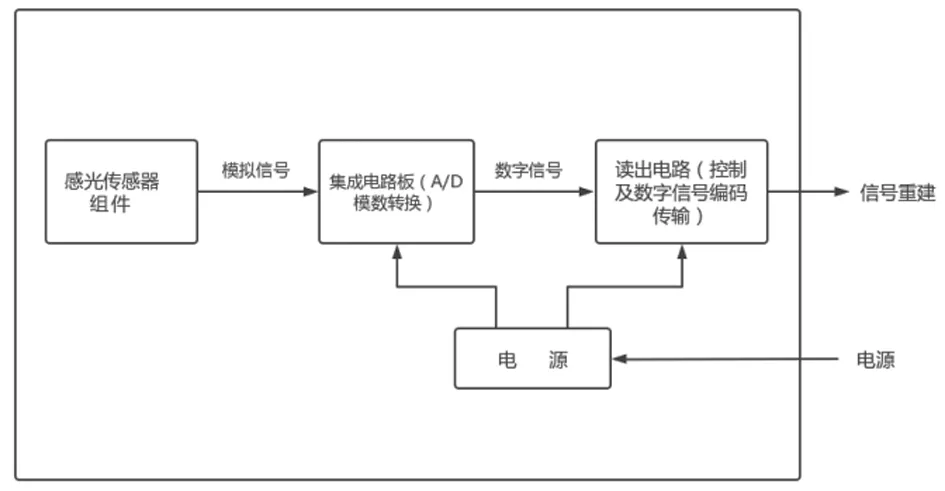
图1 平板探测器内部组件构成框图
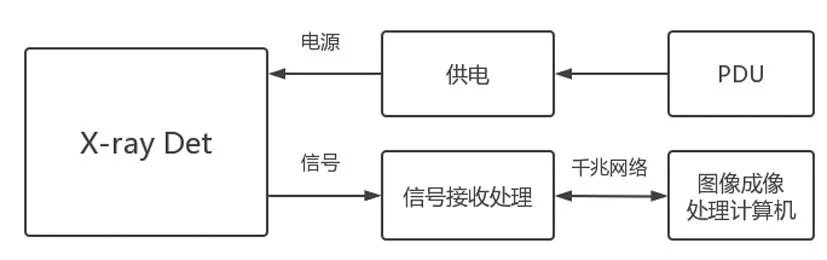
图2 平板探测器系统工作原理框图
根据以上分析,初步判断故障原因可能涉及两个方面:(1)平板探测器探头部分损坏导致连接故障;(2)平板探测器内部模数转换芯片损坏或通信控制等电路发生故障。
2.2.1 故障排查
首先,观察成像系统是否有图像生成,如果无图像生成,且系统未报通信错误,则说明图像成像处理及信号接收处理单元可正常通信,否则考虑模块之间线缆连接松动或平板供电部分异常,通过检查各模块的电源指示灯可以快速排除此类故障。如部分指示灯不亮,可断开电源总闸后重新连接各级电源线,通过万用表等电压测量手段快速定位和排查故障。如果电源系统检查无异常,但未收到任何图像,则检查信号接收处理机与X 线平板探测器之间的通信线缆,如果线缆及接线正常,则初步判断为探测器数字信号编码传输单元故障,导致整个AD 转换后的信号无法对外进行总线传输。该类失效会导致系统无法正常对患者进行定位。
如果成像时能够生成部分影像图像,其余整块区域图像为全黑或全白显示,则为平板探测器内局部AD 转换电路损坏,该损坏可能会对治疗定位造成一定影响。
如果成像时有直线或竖线区域无法显示,则可判断为感光信号传输线损坏。该损坏不会影响设备正常使用。
覆盖成像时有单个点或分散点状图像显示为全黑(白),则可判断为单个传感点失效,该类失效不影响设备正常使用。
根据以上故障排查规则,故障分析如下。
由图3 可知,以中线为界,探测器左右两侧出现了明显的黑白分区,右侧为正常成像状态,左侧区域为全黑状态,说明平板探测器系统左侧区域电路部分工作异常。结合探测器的透视图(见图4)进一步分析推测,该探测器主要分为左右两个相互独立的工作模块,大面积图像黑化可能是左侧电路通信控制模块失效,无法实现对左侧区域AD 转换数据进行有效对外发送,导致系统丢失探测器左半侧区域数据。
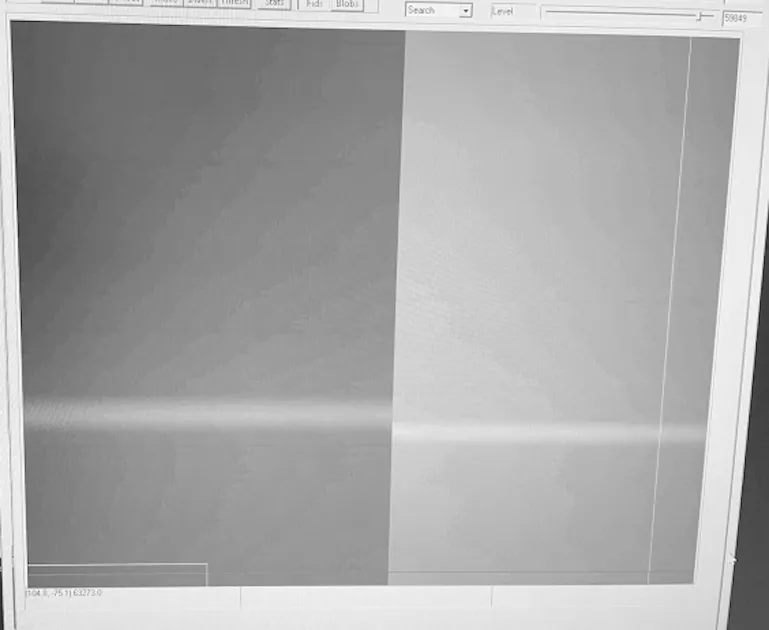
图3 平板探测器测试成像图

图4 平板探测器系统左区域电路透视图
进一步调查发现,出现该故障现象前后,平板探测器未受到任何人为触碰或重力损伤,而是在设备正常操作过程中偶然发现图像成像有缺失(见图3)。按照一般故障处置原则,优先采用断电后重启相关系统,以判断是否为偶发性通信故障,系统重启后多次手动X 线曝光,发现故障仍未排除。故初步判定为探测器内部通信芯片或多个AD 芯片出现不可逆损坏,由于设备处于质保期,可返厂监测并进行更换。
2.2.2 故障修复及要点
更换平板探测器的具体步骤:待更换备件(X 平板探测器)送达场地后,首先检查备件供电是否正常,初步安放至平板探测器安装支架,接收一次X 线曝光,通过接收图像判断平板探测器是否工作正常,同时验证原诊断结果无误。
安装平板探测器的相关注意事项及要点:(1)在更换平板探测器过程中,移动或安装调试时需注意轻拿轻放,切勿剧烈碰撞或踩踏探测器;(2)在相关平板探测器线缆安装及接插过程中注意进行防静电接地处理,切勿带电操作;(3)平板探测器必须按照规范要求水平放置并调试到位锁定,水平误差小于0.1°;(4)安装防护挡板时调整安装支架高度,确保铅板与探测器之间至少保持一张A4 纸厚度的距离,避免铅板压坏探测器;(5)安装完成后,对平板探测器执行相关物理测试,以满足要求。
更换完成后,执行射波刀开机试运行,可清晰采集X 线图像,进行图像一致性匹配测试,成像结果完全在射波刀规定的偏差范围内,故障修复。
3 讨论
本例故障由射波刀平板探测器异常引发,为延长其使用寿命,可以采取以下措施:一是优化患者治疗计划,选择合适的治疗角度,尽可能使机器人发出的高能MeV 级射线不直接照射平板探测器AD芯片区域,故需物理师和技师团队密切配合,在确保最佳治疗效果的前提下,科学设计治疗方案和机器人运动轨迹方案,使高能射线直接作用于平板探测器上的治疗野区最小;二是加强平板探测器的防护保护。图3 平板探测器的透视图显示,白色部分即平板探测器主要芯片所在位置。由于设备使用频率较高,尽管芯片上已覆盖了屏蔽金属层,该屏蔽层能满足kV 级X 线照射的防护需求,但芯片在被高能MeV 射线直接长时间照射后,其内的晶体管可发生不可逆损坏,由于探测器平板高度集成,损坏后只能进行整体更换,退回原厂才能维修,导致系统无法正常使用,间接增加了维修使用成本和时间成本。
为了延长M6 型射波刀平板探测器的使用寿命,并节约维修和使用成本,确保其能够长期稳定工作,可在现有基础上,在平板探测器上方芯片所在区域再加一层铅防护装置,目前射波刀平板探测器接收探头区域外侧所在的电路板区域已有20 mm 的铅板,该厚度虽能阻挡95%以上的高能射线,但剩余的穿透能量依然较高,如果想进一步改进,可根据透视图在主要芯片(AD 类芯片和通信及控制芯片)贴片区域再加15 mm 以上的铅屏蔽板。铅板的宽度和安装位置可根据透视图进行精确计算。对于受射线影响较小的非芯片部分,可不用安装铅板,以减小承重支架压力、节约铅块成本,同时减少拆装工作量。
猜你喜欢
数学大王·中高年级(2021年4期)2021-04-27
装备制造技术(2020年3期)2020-12-25
癌症进展(2020年20期)2020-12-24
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
家庭影院技术(2019年8期)2019-08-27
小学科学(2019年12期)2019-01-06
大众健康(2017年6期)2017-06-14
中国医学装备(2015年10期)2015-12-29
太空探索(2014年9期)2014-07-10
