
基于超声波和毫米波雷达的泊车感知系统研究
2023-05-22 03:56:40闫力博陈彩霞韩晓惠
汽车实用技术 2023年9期
闫力博,陈彩霞,韩晓惠
(广东省智能网联汽车创新中心有限公司,广东 广州 511400)
随着科技的进步,人工智能的兴起,自动驾驶技术发展迅猛,越来越多的汽车配备了先进的辅助驾驶系统,其中自动泊车作为一项L2级别的辅助驾驶,深受新手司机的喜爱。自动泊车系统由环境感知、路径规划、跟随控制和人机交互(Human Machine Interface, HMI)等部分构成,环境感知作为自动泊车系统的重要组成部分,其检测结果越准确,覆盖范围越大,对泊车的安全性越有保障。
目前主流的环境感知方案通常采用收发一体的超声波传感器,用于探测障碍物的距离和空间信息,但由于超声波传感器受其物理特性的限制,探测距离在0.2~5 m之间,在泊车的过程中,若遇到后方远距离来车,存在无法提前预警的局限。
本文旨在超声波雷达感知系统的基础上,提出一种基于超声波雷达和毫米波雷达的自动泊车感知系统方案,扩大车辆后方感知范围,为系统规避碰撞或驾驶员接管给予更多反应时间。
1 研究现状
1.1 方案介绍
泊车感知系统通常由12个超声波雷达组成,控制器(Electronic Control Unit, ECU)以输入输出接口(Input and Output, IO)方式驱动传感器震动,发出声波。其中,IO控制方式是采用一根硬线,通过不同的脉宽实现多个指令通信[1]。系统根据声波信号的反射时间计算出障碍物的距离和位置信息,从而进行路径规划,控制车辆泊入选定车位。
如图1所示,短距超声波雷达位于车辆的前方和后方,编号为1~8号,探测距离在0.2~2 m,在泊车过程中主要起到探测车辆周围障碍物的作用,长距离超声波雷达位于车辆的两侧,编号为9~12号,探测距离在0.2~5 m,在车辆行进过程中,主要用于车位探测,以珠海上富电技股份有限公司的超声波雷达为例,传感器分类及特性见表1。

图1 自动泊车系统方案

表1 超声波传感器参数
1.2 场景局限
如图2所示,在自动泊车过程中,当在探测距离之外的车辆快速驶向正在泊车入位的车辆时,后方的短距超声波雷达仅能提供2 m以内的预警,若后方来车无法有效减速,非常容易造成停车场碰撞事故,所以开发一种提升后方探测距离的自动泊车感知系统方案迫在眉睫,可以大大降低此类追尾事故的发生。
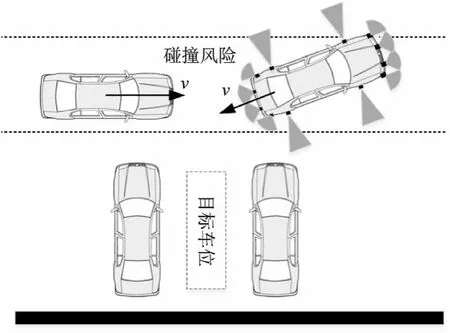
图2 场景局限
2 基础分析
长距超声波雷达探测范围在0.2~5 m之间,但视场角仅有50°,水平探测范围过小,所以需要找到一种和超声波雷达探测原理相似的传感器,替代后方中部6号和7号位置的雷达,提升探测距离,且替代传感器需具备探测距离远,探测视场角与超声波雷达基本一致,成本适中的特点。毫米波雷达在自动驾驶中应用广泛,其中短距毫米波雷达的特性与超声波雷达有一定的重合,探测距离达到15 m,可以有效提升探测范围。
2.1 超声波传感器和毫米波工作原理
2.1.1 超声波传感器工作原理
超声波是指谐振频率高于20 Hz的声波,常用探头的工作频率范围在40~60 kHz,频率越高反射能力越强,但是水平和垂直方向的视场角也越小。超声波主要通过发射、回收声波来探测障碍位置,测量其时间,即超声波发射器向某一方向发射超声波,在发射的同时开始计时,声波在空气中传播,途中遇到障碍物后反射,将超声波接收器收到反射波停止时间差记为T,根据超声波在空气中的传播速度V,可计算出发射点至距障碍物的距离L[2]:
2.1.2 毫米波雷达及工作原理
1.毫米波雷达
车载毫米波雷达通常指工作在 30~300 GHz频域的雷达,覆盖 L1—L4 各个阶段,用于前车防撞预警、自适应巡航、变道辅助及盲点监测等辅助驾驶功能,主流频段主要有24 GHz和77 GHz两种,技术及应用已相对成熟[3],可为车辆提供多种高精度的路面空间信息,如:目标区域中车辆的距离、方位角和相对速度等,且不受天气影响。这些信息对车辆主动控速、避让其他车辆,甚至执行紧急安全措施都具有非常重大的意义。
2.FMCW调频连续波
调频连续波(Frequency Modulated Continuous Wave, FMCW)是一种连续非离散的调频信号,在雷达系统中应用广泛,但使用脉冲测距需要发送尖锐的脉冲,带宽需求较大,毫米波雷达实际使用的是FMCW中的chirp信号,根据发射和反射的信号频偏fb间接估计传播延时τ。
如图3所示,实线为发射信号,其频率随时间线性增加。在t时刻的频率为

图3 FMCW波形
将发射信号进行调制,设幅值为1。
从目标反射回来的信号,相对发射信号有时间延迟τ,忽略幅度衰减,则在t时刻接收的反射信号可表示为
式中,R为收发器和目标之间的距离;C为传播速度。解调得
复原信号通过低通滤波器,将高频分量滤掉,化简得
由式(2),知vm的频率:
对于静态或移动非常慢的目标v接近于0,在频谱中有一个峰值在处,如果发射机和接收机之间存在多条传播路径,则混合信号的图谱会出现多个峰值,在这种情况下,fb由第一个峰值决定,它对应于直接路径,目标的估测距离简化得
2.2 超声波雷达和毫米波雷达参数特性对比
毫米波雷达在自动驾驶领域中应用广泛,以森思泰克公司官网公布的毫米波雷达为例,参数指标如表2所示,长距离雷达的整体视场角比较小,雷达发射比较集中,但探测距离较远,而中距离雷达探测范围在1~70 m,主要用于支持变道辅助(Lane Change Assist, LCA)的场景[4]。短距离毫米波雷达与超声波雷达功能和探测范围有一定重合,相较于短距离超声波雷达,毫米波雷达探测范围更大,可以精确定位车身周围的车辆、行人和障碍物的位置,有着更远的预警距离。

表2 毫米波雷达技术参数
短距超声波雷达在近距离探测上稳定性强,成本方面也比较有竞争力,而短距离毫米波雷达在探测范围和探测角度等方面性能更加优秀,两者在不同方面各自有优势,毫米波雷达受天气和温度影响较小,所以在一定程度上,自动泊车的场景下有替换短距超声波雷达的潜力,弥补超声波雷达探测距离过短的问题。
3 方案设计
超声波雷达的自动泊车感知系统已十分成熟,并且成本较低、应用普遍,所以在其方案的基础上进行升级,既符合价格趋势,也降低了方案中由于探测距离不足而产生的潜在风险。
3.1 系统框图
基于超声波和毫米波雷达的自动泊车系统,如图4所示,在原超声波方案的基础上进行升级,由6个短距离超声波雷达、4个长距离超声波雷和2个24 G短距毫米波雷达构成,自动泊车控制器通过3路控制器局域网(Controller Area Network,CAN)与整车和毫米波雷达进行通信。
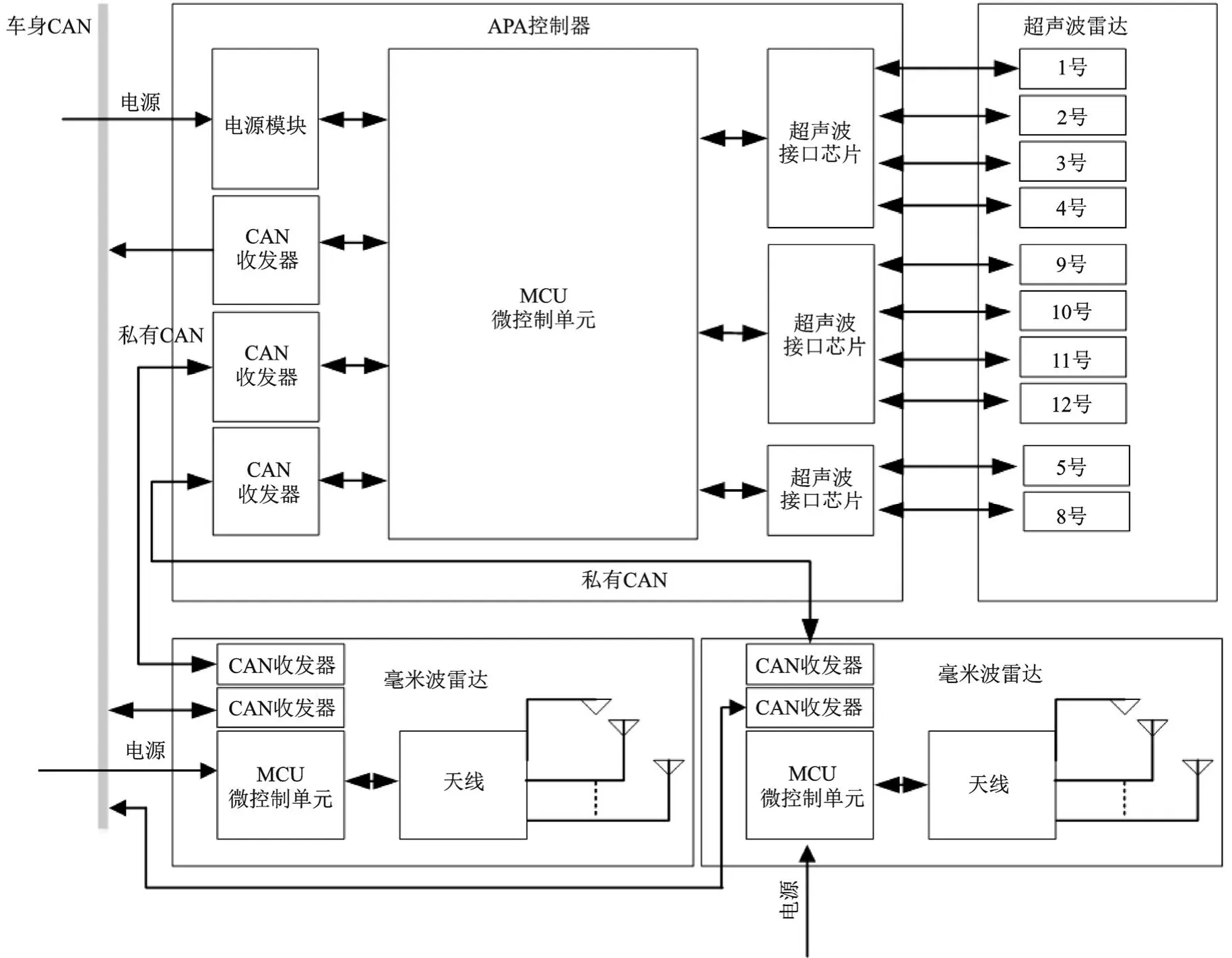
图4 系统框图
毫米波雷达从整车CAN网络获得车辆速度等信息,通过天线发送和接收回波,计算出当前障碍物距离,通过与自动泊车(Auto Parking Assist,APA)控制器直接相连接的私有 CAN,将距离、方向角和相对速度等信息反馈给控制器的微控制器单元(MicroController Unit, MCU),通过私有CAN提高了信号的反馈速率和通信效率。
ECU以IO接口等方式驱动超声波雷达,计算出车辆周围障碍物的距离,通过结合毫米波雷达反馈的信息,推导出后方车辆的距离位置,将结果显示在HMI界面上,从而提示驾驶注意安全和为自动泊车规划提供避让输入。
3.2 系统原理
基于超声波和毫米波雷达的自动泊车方案,其侧向长距超声波雷达对车辆两侧的空间进行探测,用于车位的识别和定位,后方6号和 7号位置传感器由毫米波雷达替代,检测距离可增加至15 m,用于危险警示。
如图5所示,在检测车位时,驾驶员以20 km/h以下的车速驾驶车辆在停车场中寻找可用车位,当车辆经过A车停放的位置时,装在车身侧面的超声波雷达开始测量车辆与 A车的横向距离D,当车辆驶过A车的右侧边缘时,超声波雷达的测量距离会有一个跳变,记录此时时刻。车辆继续前进,当行驶在A车与B车之间时,系统计算可以求得车位的平均宽度W。当通过B车左侧边缘时,超声波传感器测量的数值又发生跳变,系统记录当前时刻,算得最终的车位长度L。系统对测量的车位长度L和宽度W进行分析,判断车位是否符合泊车基本要求,释放给路径规划模块。
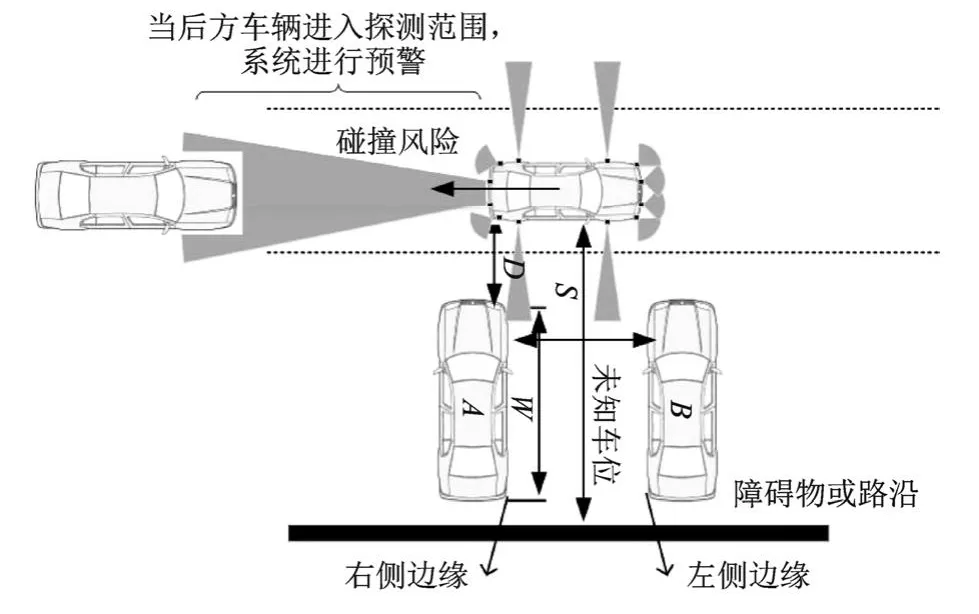
图5 场景示意
在系统运行的过程中,两颗毫米波雷达探测后向车辆,当进入到探测范围时,毫米波雷达将感知信息反馈给自动泊车系统,系统通过HMI提示给用户,达到提前预警的效果。
4 总结与展望
本文提出了一种基于超声波雷达和毫米波雷达的自动泊车感知系统方案,通过介绍超声波雷达感知系统的场景局限,分析超声波雷达和毫米波雷达的工作原理,提出了基于两种传感器的自动泊车方案,利用24 G短距离毫米波雷达替代后部两颗短距离超声波雷达的方式,弥补了自动泊车过程中由于后方探测距离过近,无法提前警示驾驶员的不足。从而提升自动泊车系统的感知能力和智能化水平,具有较好的探讨意义。
猜你喜欢
汽车实用技术(2023年10期)2023-06-14 07:13:06
汽车实用技术(2022年19期)2022-10-19 07:46:46
汽车实用技术(2022年7期)2022-04-20 11:57:58
汽车画刊(2020年5期)2020-10-20 05:37:35
祝您健康·文摘版(2020年3期)2020-04-09 04:47:27
军民两用技术与产品(2020年3期)2020-04-07 03:00:26
电子制作(2018年17期)2018-09-28 01:56:38
现代家长(2018年11期)2018-01-05 11:22:22
军事文摘·科学少年(2016年7期)2016-09-20 16:49:54
电子制作(2016年21期)2016-05-17 03:52:47
