
深水孔洞清淤机器人设计及应用
2023-05-21 00:16程阳锐潘洪月宛良朋胡洋
水利水电快报 2023年5期
程阳锐 潘洪月 宛良朋 胡洋
摘要:
针对深水孔洞清淤的现实需求,即清淤机器人需具备水下清淤、行走、定位、动力及智能控制等基本功能,通过对清淤环境的分析,设计一款具备闸门前淤积物清理的智能化深水孔洞清淤机器人。根据清淤机器人作业中的难点,对布放回收技术方案进行了详细介绍,包括上平台、下平台及吊放绞车等,实现清淤机器人的布放、入洞、动力供给和回收等功能。在实验室对清淤机器人的直线行走性能进行试验,结果表明:清淤机器人具有技术可行性和作业能力。
关键词:
清淤机器人; 水库淤积; 孔洞清淤; 布放回收; 智能控制
中图法分类号:TV851
文献标志码:A
DOI:10.15974/j.cnki.slsdkb.2023.05.008
文章编号:1006-0081(2023)05-0050-05
0 引 言
水库是调控水资源时空分布、优化水资源配置的重要工程举措,是江河防洪工程体系的重要组成部分、社会经济发展不可替代的基础设施与生态环境改善不可分割的保障系统。水库关系地区防洪安全、供水安全与粮食安全,具有很强的公益性、基础性以及战略性。截止2020年中国已建成各类水库98 566座[1]。但这些水库大多数兴建于20世纪50~70年代,冲排沙设施不足,经数十年运行普遍存在不同程度的淤积问题[2-3]。水工闸门作为水库控制水流的主要设备,是水利工程的关键组成部分之一。
闸门启闭运行正常与否,不仅直接关系到水库工程合理调度水资源的效率,还关系到工程运行安全[4]。由于闸门长时间于水下工作,难以定期动闸冲沙,泥沙不断在闸前沉积。受泥沙侧压力作用,闸门后期启闭力数倍增加,甚至常出现无法开启的情况[5]。例如:陕西省王瑶水库无溢洪道,泄洪洞为工程唯一的泄洪设施,自1972年运行以来泄洪洞频繁堵塞,给工程安全运行带来巨大安全隐患,威胁着下游人民生命财产安全[6]。2013年向家坝水电站坝后厂房尾水检修闸门淤积[2],2019年四川龙潭水电站大坝泄洪闸无法开启[2],鸭河口水库循环水泵站进口淤积了大石块、碎石、泥沙等杂物,清淤深度约18 m,工程耗时8个月,清淤约1 800 m3,潜水员下水作业1 286次[7]。定期对闸门前的淤积物进行清理,对确保水库安全具有重要意义,是当前诸多水库的迫切需求。
本文针对深水孔洞清淤需求,设计了一款具备水下清淤、行走、定位、动力及智能控制等功能的水下清淤机器人,对其布放回收技术方案进行了详细介绍,同时通过实验室试验和工程应用验证了相关功能和性能。
1 深水孔洞清淤机器人设计
针对水工闸门的深水、长孔洞(深孔)等典型特征,根据深水孔洞清淤需求,设计一款可用于水深200 m、具备闸门前淤积物清理的智能化深水孔洞清淤机器人,解决当前深水孔洞清淤的难题。
1.1 设计思路及原则
借鉴深海采矿装备作业技术,水下深孔清淤机器人的设计思路为:① 需适应水下清淤作业的环境,并实现对坝体无损伤作业。② 需满足整机组装、拆卸方便,便于运输、维修的要求。③ 要求整机重量小、作业流程简单、智能化程度高,且安全可靠。有关水下清淤作业环境分析如下。
(1) 闸门前作业环境分析。
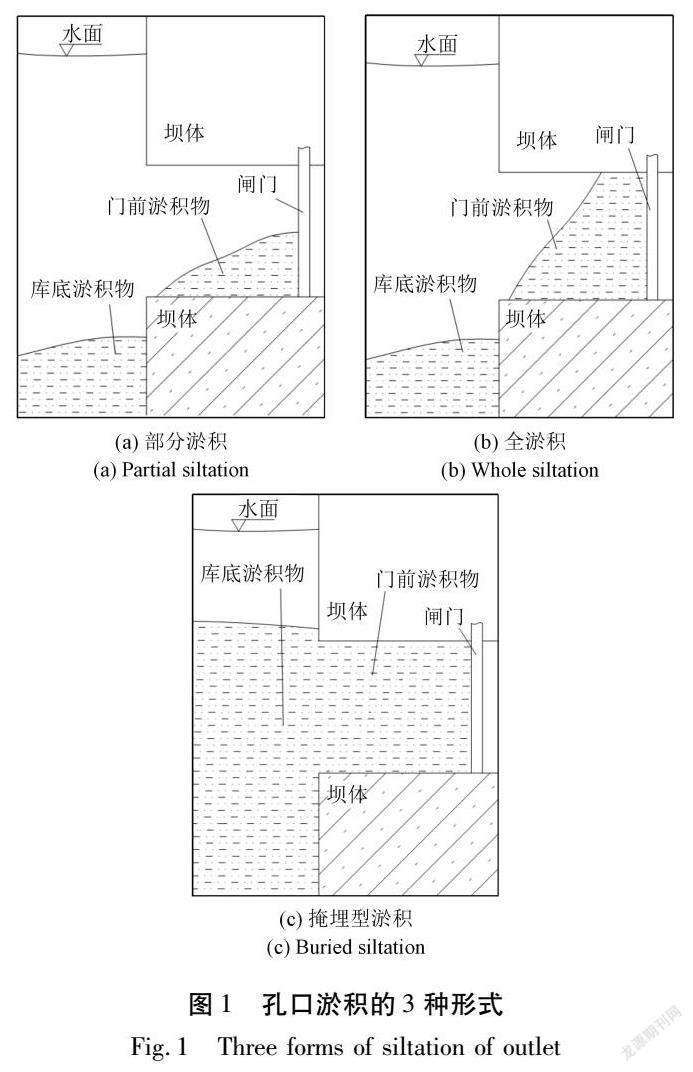
闸门一般处于关闭状态,清淤作业期间为静水。闸门前一般有一段长度不等的孔洞,孔越深相对作业难度越大。如小浪底排沙洞进水口宽3.5 m,高6.3 m,顶部为拱形[8],洞口距离闸门约20 m。孔洞内的淤堵一般分为3种(图1):部分淤积;全淤积,即孔内淤满但未与库底淤积直接连接;掩埋型淤积,即深孔全部淤积且孔口也被掩埋在淤堵物表面之下,如三门峡水库在1996年出现过的淤积情况,排沙洞进口淤积高程比孔口高出22.3 m[9]。其中,深孔孔内部分淤积最为常见。
本文仅对部分淤积的情况进行清淤作业研究。在该种工况下,水下孔洞位于坝体中间,水下清淤机器人需要在水下“悬空”进入孔洞中,并將孔洞中的淤积物排除到洞口外。
(2) 淤积物类型分析。
水库的淤积物种类较多、形状复杂,一般孔洞内淤堵物可分为松散泥沙、板结泥沙、较小体积杂物、较大体积杂物等4种类型。较小体积杂物一般为生活垃圾(泡沫、塑料)、半悬浮物品(水产养殖用的网箱残余、绳子、树枝木块)、建筑垃圾(钢管、水泥块、破碎模板、竹跳板)等等。较大体积的杂物包括杂物块石、树桩等。同一孔洞中一般同时存在多种不同类型的淤积物,需要水下清淤机器人具有较高的作业适应能力。
(3) 坝前环境分析。
坝前环境主要包括作业区域的水陆交通条件,坝顶、坝前库边道路及容易进行设备吊装及布置的开阔场地,一般近坝库区具备能够将设备运输至水面的码头或下水点,坝顶或近坝岸坡附近需能够提供动力电源。
1.2 功能设计
(1) 清淤功能。根据深孔孔洞中的淤积类型及环境特征,松散泥沙类的淤积物可直接通过泥浆泵进行抽吸,排出洞口外;板结泥沙则可先使用作业机构进行搅动,然后用泥浆泵进行抽吸,排出洞口;体积较小的杂物,则需要在清淤机器人的作业臂上设置抓取机构,将其抓取并移送到孔洞外。对于大体积的杂物,如块石、树桩等,可能需要清淤机器人搭载专门的岩石破碎、切割或者爆破装置进行清理。
根据上述功能需求,机器人清淤拟采用小型化绞吸头搭配泥浆泵抽吸作为基本作业单元,同时搭载可以替换的抓取机构和岩石破碎、切割作业机构作为配套。
(2) 行走功能。深水孔洞中闸门距离洞口有一定的距离,因此需要清淤机器人能够自主移动到闸门前进行清淤作业。水下设备移动一般采用悬浮推进和着底自行走两种方式。悬浮推进一般使用螺旋桨提供动力,常用于零浮力、正浮力或者水中重量相对较小的设备,具备轻载作业能力,水下的灵活性较高。着底自行走一般采用履带式自行走,通常用于水中重量相对较大、需较大负载作业的情况。根据作业环境及工况分析,拟采用履带自行式方案。
(3) 定位功能。水下清淤机器人在孔洞中作业时,受狭窄空间的限制以及水体浑浊度的影响,声学定位和光学设备很难提供准确的数据参考。为了保证机器人能够在孔洞中按预定路径行走和清理淤积物,深孔清淤机器人通过尾缆长度、侧向距离及自行姿态信息方式进行定位和三维显示。
(4) 动力功能。整个清淤系统采用岸载或船载电源进行供电。电能分别被输送给水面吊放回收系统和水下清淤机器人的电机中,以及各部分控制电源。水面吊放回收系统通过液压系统的电机泵组将电能转换为液压能,进行各执行机构的动作及控制;水下清淤机器人采用液压系统将电能转换为液压能,分别供给机器人的疏堵、行走及航向控制等。
(5) 智能控制功能。水下清淤机器人的整套控制系统借鉴深海采矿中集矿车的控制作业技术,在光纤通信系统的支持下,采用多级分散控制、集中监控的方式实现对机器人的全面监视和操作控制。主要功能包括8个方面:系统动力输配及控制,疏堵装置的监控,液压系统监控,车体航向和姿态监控,履带自行式行走监控,装置下放、回收过程监控,水下作业环境监视和水面监控中心。
1.3 布放回收设计
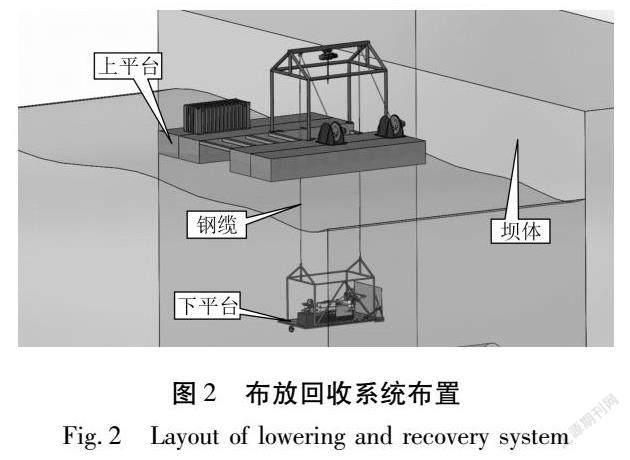
考虑深水孔洞建筑物表面一般不具有足够的作业空间,且大多孔洞前不具有承载平台,为使水下清淤机器人安全可靠的进入孔洞内作业,且不损伤坝体,水下清淤机器人需借助专用平台进行布放、回收。为给机器人调试、检修以及操作提供合理的作业条件,设计了一套具有较高机动性和灵活性的布放回收系统,布置如图2所示。
布放回收系统分为水面平台(上平台)和水下平台两部分,其中水面平台为整套系统提供水面支持,用于对孔洞清淤机器人布放回收、相关辅助设备安装、试验人员作业、系统动力供应、系统控制等,主要包括水面浮箱、吊装架、电动绞车、电控集装箱等;水下平台主要用于承载清淤机器人,使清淤机器人能够进入孔洞内作业以及固定排出管,其主要由吊装框架、水下液压站、水下平台、螺旋桨、卡爪机构和连接跳板等组成;水面平台与水下平台之间设有8个固定连接点,水下平台固定导柱穿过水面平台固定块后,通过销轴连成一个整体。
1.3.1 水面平台设计
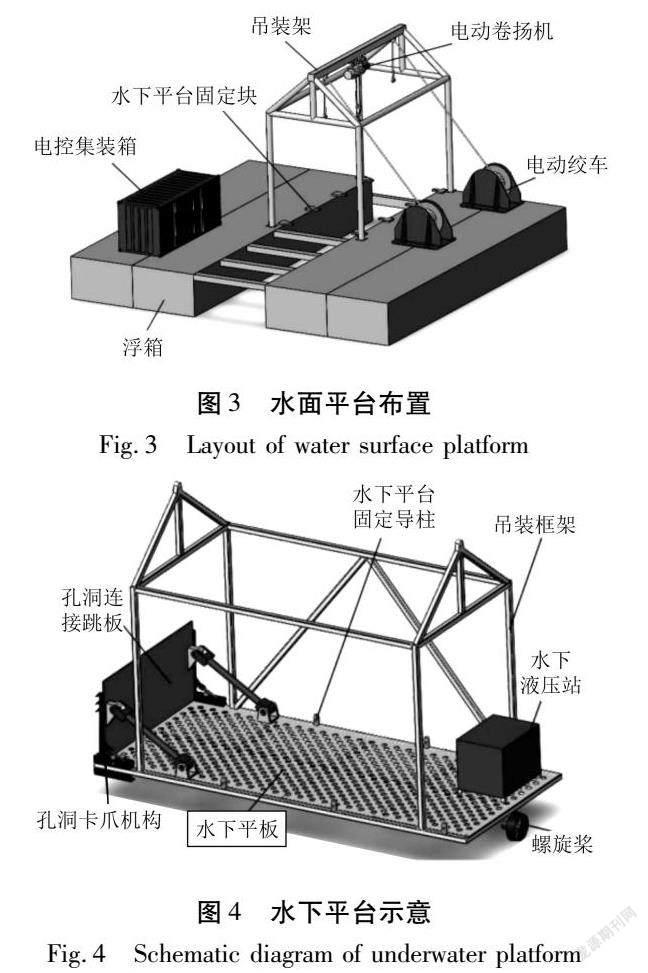
水面浮箱主要由4块浮箱块拼接而成,如图3所示,水面平台布置有电控集装箱、吊装架、电动绞车等。中间预留清淤机器人布放回收空间,两块平台之间通过工字钢连接,同时设备吊放以外区域上面铺以钢板,作为人员行走及作业平台。
1.3.2 水下平台主要组件设计
水下平台主要由吊装框架、水下液压站、水下平板、螺旋桨、卡爪机构和连接跳板等组成,如图4所示。其中,吊装框架通过滑轮与电动绞车上的钢丝绳进行连接,进行整体的布放与回收;吊装框架主要用方钢现场组焊而成。为保证水下平台的稳定性并便于姿态调整,在平台尾部布有螺旋桨,通过调节控制水下平台的位置及与坝体之间的距离,实现水下平台与孔洞的精准对接。
为保证水下平台到达指定位置后,清淤机器人行走时平臺的稳定性,在水下平台与孔洞接触处布有卡爪机构,当水下平台与孔洞位置对接完成后,卡爪机构打开,卡爪插入孔洞内壁,使水下平台与坝体之间建立稳固的连接。水下平台上设有翻板机构,使孔洞清淤机器人能越过水下平台与坝体之间的间隙,自行驶入孔洞内进行作业。水下液压站主要作为螺旋桨、卡爪机构和连接跳板的动力来源,布置于水下平台的尾部,通过液压分别驱动各执行部件的液压缸和液压马达,辅助水下机器人进行清淤作业。
2 验证及应用
根据设计方案研制了深水孔洞清淤机器人样机“达诺1号”(DreRo-Ⅰ),分别在实验室和工程现场对其孔洞作业下的直线行走性能、清淤作业等进行了重点测试验证。
2.1 直线行走性能测试
深水孔洞清淤机器人在水下空洞中作业时,一般为长直孔洞,确保清淤机器人能直线行驶尤其重要。清淤机器人的直线行驶性能主要体现在两个方面,一是其航向保持能力,二是其绝对轨迹偏差。从前期的实验测试中可知,机器人可维持航向在1°的偏差范围内正常前进[10]。然而,1°的偏差仍可能与洞壁发生碰撞甚至出现无法前进的情况,需要对其绝对直线行走偏差进行测试。
测试在长40 m、宽10 m、深5 m的实验水池中进行,实验水池底部铺设约1 m厚的黏性土底质,剪切强度5~10 kPa。清淤机器人布放完成后,加注深约2 m的水(刚好淹没清淤机器人)。准备工作完成后,通过智能控制系统给定直线行驶指令,待直线超过10 m后停止,排干水池中的水,对清淤机器人的行走轨迹进行测量,获得其直线行驶绝对偏差值。
水池放水后,实测清淤机器人行驶后形成轨迹直线性较好,偏差在20 mm内,一般孔洞相对于清淤机器人的左右总间隙超过1 m,因此在孔洞稀软底质情况下,清淤机器人可实现直线行驶并完成作业任务。
2.2 清淤作业及应用
为进一步验证清淤机器人的水下清淤作业能力,先后在小浪底、乌东德、马鹿塘等地完成水下作业,实现了不同作业场景的应用,如水下清淤、水下爆破作业、油漆涂刷等。
(1) 小浪底水下清淤作业。2019年在小浪底工程试验中,“达诺1号”水下机器人下至大坝排沙洞口处,水深82.3 m,排沙洞宽3.5 m、高6.3 m。水下机器人通过环境感知单元进行路径探索,准确找到排沙洞口,并利用综合导航控制系统,以0.5 m/s的速度在洞内行走至目的区域,实施了孔洞内清淤作业后退出排沙洞,在坝体前方淤积区域成功开展了行走和清淤作业[11]。
(2) 乌东德水下爆破作业。2020年在乌东德水电站坝后水垫塘处理中,通过缆机+电葫芦形式下放与回收水下机器人。在水下机器人布放至水底并确定自身位置后,通过调节机械臂角度与位置,将携带的炸药框准确布放至预设的钢板上,回收水下机器人后引爆炸药框,顺利完成了100 m级深水环境水下爆破精准切割任务。
(3) 实验室油漆涂刷作业。2020年在实验室搭建了水下涂刷作业平台,通过远程操控机器人的机械臂,顺利实现对水下钢板的防腐涂料涂装,通过水下摄像头进行观察,整个水下涂刷过程动作连续,过程流畅,可实现高精度涂刷作业,作业情况如图5所示。
(4) 马鹿塘水下作业。2020年在云南文山马鹿塘水下作业中,在抓斗、清淤泵完成开阔水面部位淤积物清理后,“达诺1号”清淤机器人进入洞口内,通过模块化设计的清淤耙,清除了关键的淤堵区域。虽然实际清淤方量不大,但打通的关键节点使得洞室全线贯通,为后续开闸冲沙创造条件,在解决技术难点的同时大幅节省了工程投资,取得较好效果。
3 结论及展望
根据当前中国深水孔洞清淤的实际需求,设计了一款可用于水下深孔疏堵清淤的清淤机器人,具备水下清淤、行走、定位、动力及智能控制等功能。配套设计的布放回收系统,由上平台、下平台及吊放绞车等组成,可实现孔洞清淤机器人的布放、入洞、动力供给、回收等功能,保障设备作业。研制的清淤机器人“达诺1号”通过实验室及现场工程应用,实现了水下清淤、水下爆破作业、油漆涂刷等不同场景下应用作业,验证了其直线行驶性能、水下清淤作业能力,表明该方案技术可行,可进一步开展深入研究,但在其工程适应性、安装快捷性等方面有待进一步发展。
参考文献:
[1] 中华人民共和国水利部.2020年全国水利发展统计公报[R].北京:中华人民共和国水利部,2021.
[2] 陆杨,许慧,李国斌,等.泥沙淤积对不同类型水库功能影响评价[J].人民长江,2021,52(增2):237-241.
[3] 郭超,金中武,闫霞,等.长江流域水库清淤初探[J].水利水电快报,2019,40(11):53-55.
[4] 任实,胡兴娥,邢龙,等.三峡水库坝前深水清淤疏浚技术研究[J].长江科学院院报,2023,40(1):24-28.
[5] 梁皓.水工建筑物闸门防淤及淤积处理技术[J].云南水力发电,2022(2):209-213.
[6] 江超,盛金保,朱沁夏,等.我国水库深孔泄水建筑物统计与闸门前堆积物现状调研分析[J].中国水利,2018(12):37-39.
[7] 董索,李建清,陈利强.水库清淤技术概述[J].水利水电快报,2019,40(11):49-52.
[8] 彭建平,彭赛锋,程阳锐,等.黄河小浪底深水涵洞疏堵机器人空间识别试验[J].河南水利与南水北调,2021(1):88-90.
[9] 李善征,方伟.水库底洞发生泥沙淤堵工程实例分析[J].北京水利,2002(4):29-31,48.
[10] 黎宙,彭建平,程陽锐,等.水下清淤车性能研究及工程应用[J].采矿技术,2021,21(3):154-157.
[11] 程阳锐,王义锋,潘洪月,等.基于深海采矿技术的新型深水清淤技术方案探索[J].矿冶工程,2020,40(4):1-5.
(编辑:唐湘茜,张 爽)
Abstract:
Based on the actual requirements of deep water outlet dredging,the underwater desilting robot should have the basic functions of underwater dredging,walking,positioning,power and intelligent control.Through the analysis of the dredging environment,an intelligent deep-water hole desilting robot with the ability to clean up the silt in front of the gate was designed.Aiming at the difficulties of the robots work,the technical scheme of its laying and recovery was introduced in detail,including the upper platform,lower platform and lifting winch,which can realize the deployment,digging,power supply,recovery and other functions of the desilting robot.The linear walking performance of the desilting robot was tested through the laboratory experiment.The results showed that the technical feasibility and operation ability of the dredging robot are feasible.
Key words:
desilting robot; reservoir sedimentation; outlet desilting; placement and recovery; intelligent control
猜你喜欢
建材发展导向(2021年19期)2021-12-06
电子技术与软件工程(2021年7期)2021-06-16
收藏界(2019年3期)2019-10-10
当代陕西(2019年8期)2019-05-09
光学精密工程(2016年4期)2016-11-07
能源(2016年11期)2016-05-17
中国卫生(2015年8期)2015-11-12
计算物理(2014年1期)2014-03-11
筑路机械与施工机械化(2014年2期)2014-03-01
河南科技(2014年7期)2014-02-27
