基于广义预测控制的永磁同步电机单环鲁棒控制
2023-05-19 08:49刘国海刘亚兵崔佳伦
水下无人系统学报 2023年2期
杨 曦 ,刘国海 ,刘亚兵 ,崔佳伦
(1.海装广州局驻昆明地区第二军事代表室,云南 昆明,650101;2.中国船舶集团有限公司 第705 研究所昆明分部,云南 昆明,650101)
0 引言
永磁同步电机(permanent magnet synchronous数PMSM 的应用领域中,矢量控制策略已成为通用控制方案。矢量控制策略采用的是由外环速度控制器和内环电流控制器组成的级联控制结构,其中控制策略设计对电机控制性能、效率和可靠性具有重要影响[2]。目前工业上多采用传统比例积分(proportional integral,PI)控制,但由于PMSM是一个非线性多变量的时变系统,同时UUV 运行工况复杂多变,其装配的PMSM在运行过程中难免存在外部扰动和内部参数摄动等问题,进而导致电机控制性能下降,影响产品性能[3]。因此,对PMSM 控制系统的鲁棒性提出了更高的要求。
为了降低模型不确定性和外部扰动的影响,提高PMSM 的鲁棒控制性能,已有学者提出了多种控制方法[4-9]。目前广义上的鲁棒控制策略包括:H∞控制、滑模控制、预测控制、自适应控制和基于扰动观测器控制等策略[7]。其中基于控制系统模型采用李雅普诺夫稳定性理论来设计鲁棒控制器是最直观的,但设计满足要求的李雅普诺夫方程非常困难。H∞鲁棒控制方法被设计成处理推进电机磁场定向下的矢量控制问题,能够有效抑制转子电阻参数摄动和洋流引起的转矩波动对深潜艇推进电机调速系统的影响[8]。张翰文等[9]提出了基于自适应反步法设计运动控制器,并引入滑模项克服模型的不确定性,提高了水下航行器运动控制的鲁棒性。这些控制方法各有特点,研究者常结合各算法特点和原理设计较理想的复合控制器来满足PMSM 的控制需求。模型预测控制(model predictive control,MPC)具有强鲁棒性、动态响应快和可考虑系统约束等优点,已被广泛应用于电机驱动控制系统中。MPC 通过数学模型来预测系统未来的输出,设计目标函数,计算出最优的控制律,改进了对参数变化和外部干扰的不敏感性[10]。其中非线性广义预测控制(nonlinear generalized predictive control,NGPC)策略根据连续时间模型,通过泰勒级数展开得到预测模型,并设计目标函数得到标称系统的最优控制律[11]。此控制方法已成功应用在PMSM 中,且得到了较好的瞬态性能,该方法计算量小,易于工程实现。但其基于标称系统建模,当参数变化和模型不确定时,其控制性能会受到影响甚至失效。Errouissi 等[12]提出了基于NGPC 策略的PMSM级联控制结构,并结合扰动观测器提高了控制器抑制扰动的能力 。但级联式控制结构的调试过程较为复杂,容易造成系统不稳定。Liu 等[13]在NGPC 策略的基础上提出了基于观测器的扰动估计方案,通过前馈补偿控制方式将估算的扰动量补偿到电流控制中,实现了PMSM 电流强鲁棒控制。但在非匹配扰动下很难设计能使系统全局稳定的扰动观测器。Errouissi等[14]通过优化目标函数设计了一种PMSM 单环NGPC 鲁棒控制策略,并对其系统稳定性进行了证明。
文中以用于UUV 的PMSM 为研究对象,通过优化新型目标函数设计PMSM 单环预测控制策略,研究该策略下水下推进电机控制系统的鲁棒性能。首先设计具有积分结构的NGPC 控制律,推导出PMSM 转速-电流单环预测控制律。然后,为避免电流过大对电机驱动系统造成损害,采用了基于无差拍控制原理的电流约束策略。最后基于UUV 用PMSM 模型开展了仿真分析,验证在外部扰动和参数变化时该策略的可行性。
1 PMSM 数学模型
由于NGPC 策略高度依赖系统模型,建立匹配的PMSM 数学模型尤为重要。同时UUV 运行工况复杂多变,其装配的PMSM 在长时间运行过程中难免会存在外部扰动和内部参数摄动。因此,在考虑系统扰动的情况下,UUV 用PMSM 在d-q坐标系下的数学模型可表示为
式中:ud和uq分别为定子电压的d轴和q轴分量;id和iq分别为定子电流的d轴和q轴分量;Ld和Lq分别为定子电感的d轴和q轴分量;Rs为定子电阻;np为电机极对数;ωm为转子机械角速度;ψf为永磁体磁链;J为电机转动惯量;fd,fq和fω代表因电机内部温度变化导致的电机参数不确定系统扰动和洋流等水下环境因素引起的电机负载转矩突变系统扰动,分别定义为
式中:ΔRs=Rst-Rs;Δψf=ψft-ψf;ΔLd=Ldt-Ld;ΔLq=Lqt-Lq;ΔJ=Jt-J;ΔB=Bt-B;TL为电机负载转矩;Rst,Ldt,Lqt,ψt,Jt和Bt为UUV 在实际运行时电机的各项参数。
2 PMSM 单环广义预测控制器
2.1 控制器设计
基于NGPC 策略设计PMSM 控制器策略,实现UUV 调速驱动。首先将考虑系统扰动下的UUV 用PMSM 数学模型式(1)转换为标准非线性系统形式[13],表示为
UUV 通常恒定航速行驶,行驶工况不变时其PMSM 以定转速稳态运行,同时其电机参数随电机温度变化而缓慢变化。因此假设扰动量b变化缓慢,则有db(t)/dt=0。控制变量是输出量y的分量,设计NGPC控制器实现预测输出y(t+τ)跟踪预测参考yr(t+τ),即电机转速ωm(τ)和d轴电流id(τ)跟踪参考转速和d轴参考电流同时考虑将积分作用加入到控制器中,设计预测控制器的目标函数为
式中:T1和T2分别为电流环预测时域和速度环预测时域,由于PMSM 系统的电流环响应要快于速度环响应,一般取T1<T2;I1和I2表示为
为了求解式(6)非线性优化问题,使用李导数将h(x)沿着f(x)求导,将yi(t+τ)和yri(t+τ)扩展为ρi阶泰勒级数。其中 ρi表示每个输出的相对阶。在PMSM 的输出y1(id)和y2(ωm)的情况下,定义
式中,y1和y2的相对阶分别是ρ1=1和ρ2=2。因此,PMSM 系统相对阶为ρ=ρ1+ρ2=3。根据式(8),使用泰勒级数展开式近似输出yi(t+τ)和参考yri(t+τ)。为了实现在有限时域内电机转速和电流跟踪误差最小,需满足目标函数最小,即优化控制的必要条件为
根据Chen 提出的NGPC 策略[11],将式(6)和式(8)代入式(9),求解得到控制律为
根据文献[14]中的定理,假设扰动b(t)是有界的,在该控制律式(10)下,系统输出量能够跟踪参考输出量,随着t趋于∞,其误差收敛至0,即该闭环控制系统是渐进稳定的。从控制律式(10)可看出,该方法不需要获取外部扰动量和参数变化等信息,且具有积分控制作用。同时控制策略的结构简单,仅有预测时域T1和T2为可调控制参数,参数易于整定。
2.2 电流约束
PMSM 单环预测控制器中d-q轴电流是控制系统的状态量,不能直接对其进行约束限制。因此,采用基于无差拍控制原理的电流约束策略[3],以避免对电机和逆变控制器造成过流冲击损害。根据PMSM 在d-q坐标系下的电压方程,取采样时间Ts,将其离散化得
由式(13)看出,假设当前k时刻的电流已知,那么当k+1时刻,电流iq(k+1)和id(k+1)与电压分量uq和ud正相关。因此,可以通过限制uq和ud的幅值来约束iq(k+1)和id(k+1),使PMSM 的电流幅值在设定的范围内。取imq(k+1)和imd(k+1)为允许的最大电流值,即电流极限值,进而可得
式中,uqmax(k)和uqmin(k)分别是q轴电压的约束最大和最小值,udmax(k)和udmin(k)分别是d轴电压的约束最大和最小值。因此对输出电压约束为
3 仿真分析
基于NGPC 的PMSM 单环控制系统框架如图1 所示,采用=0策略。所研究控制策略首先获取三相电流ia、ib和ic,三相电流经过角度变换得到的id和iq。通过id、iq和速度传感器得到的ωm,根据式(10)计算得到ud和uq,然后通过电流限幅式(15)得到约束后的d-q轴参考电压分量和最后通过坐标变换和电压空间矢量脉宽调制(space vector pulse width modulation,SVPWM)算法控制逆变器开关实现PMSM 转速电流控制。
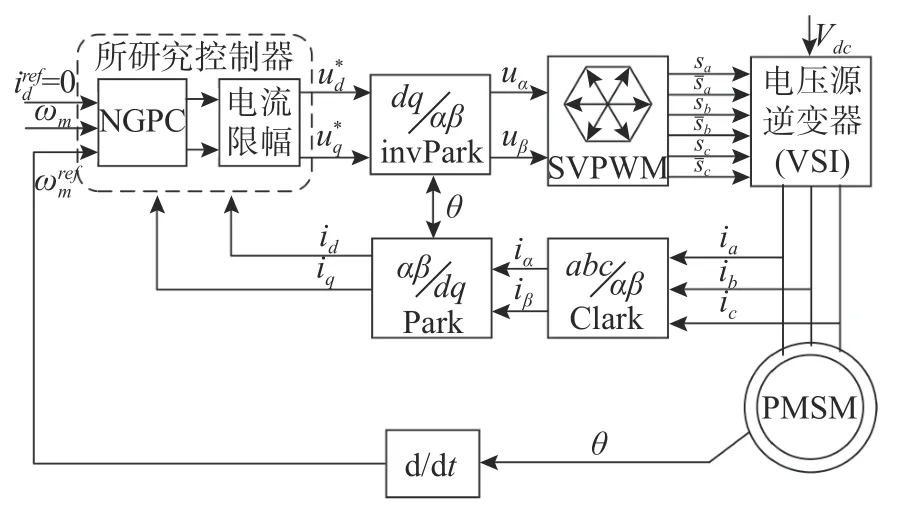
图1 控制策略结构框架图Fig.1 Structure of the control strategy
通过MATLAB/SIMULINK 仿真软件搭建的PMSM 控制系统仿真模型见图2。其中选择某型UUV 用PMSM 作为控制对象,其参数见表1。
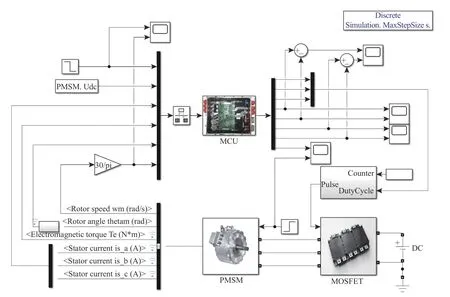
图2 PMSM 控制系统仿真模型Fig.2 The simulation model of PMSM control system
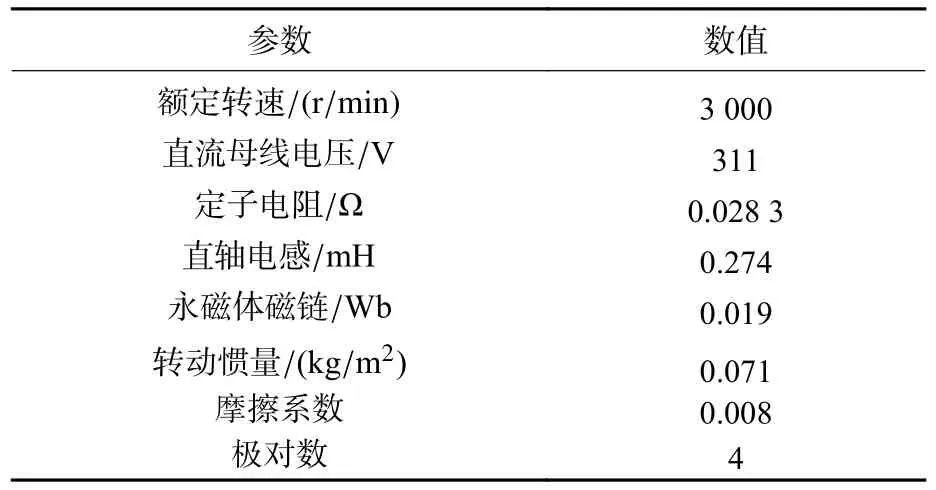
表1 PMSM 参数Table 1 PMSM parameters
采用所研究控制策略的PMSM 控制系统进行电机起动变速、负载突变和参数变化仿真实验,并与传统级联式PI 控制器相比较,验证控制策略的动态性能和鲁棒性。其中所研究控制策略的T1=10µs,T2=100 µs;传统级联式PI 控制器参数经调试优化后选择,速度环比例系数Ps=1.312,积分系数Is=0.02;电流环比例系数Pc=3.5,Ic=2.3。设置d-q轴电流限幅为[-60,60]。
1)实验1:起动变速实验
给定电机参考转速2 000 r/min,电机负载转矩5N·m。在电机运行时间为6 s 时,电机参考转速变为1 000 r/min,模拟静水下UUV 推进电机的起动变速过程,验证在加减速过程中PMSM 控制系统的动态性能。记录电机转速和电流控制数据,级联式PI 控制和所研究控制策略的仿真实验结果如图3 所示。表2 为2 种控制策略的实验结果性能指标比较。
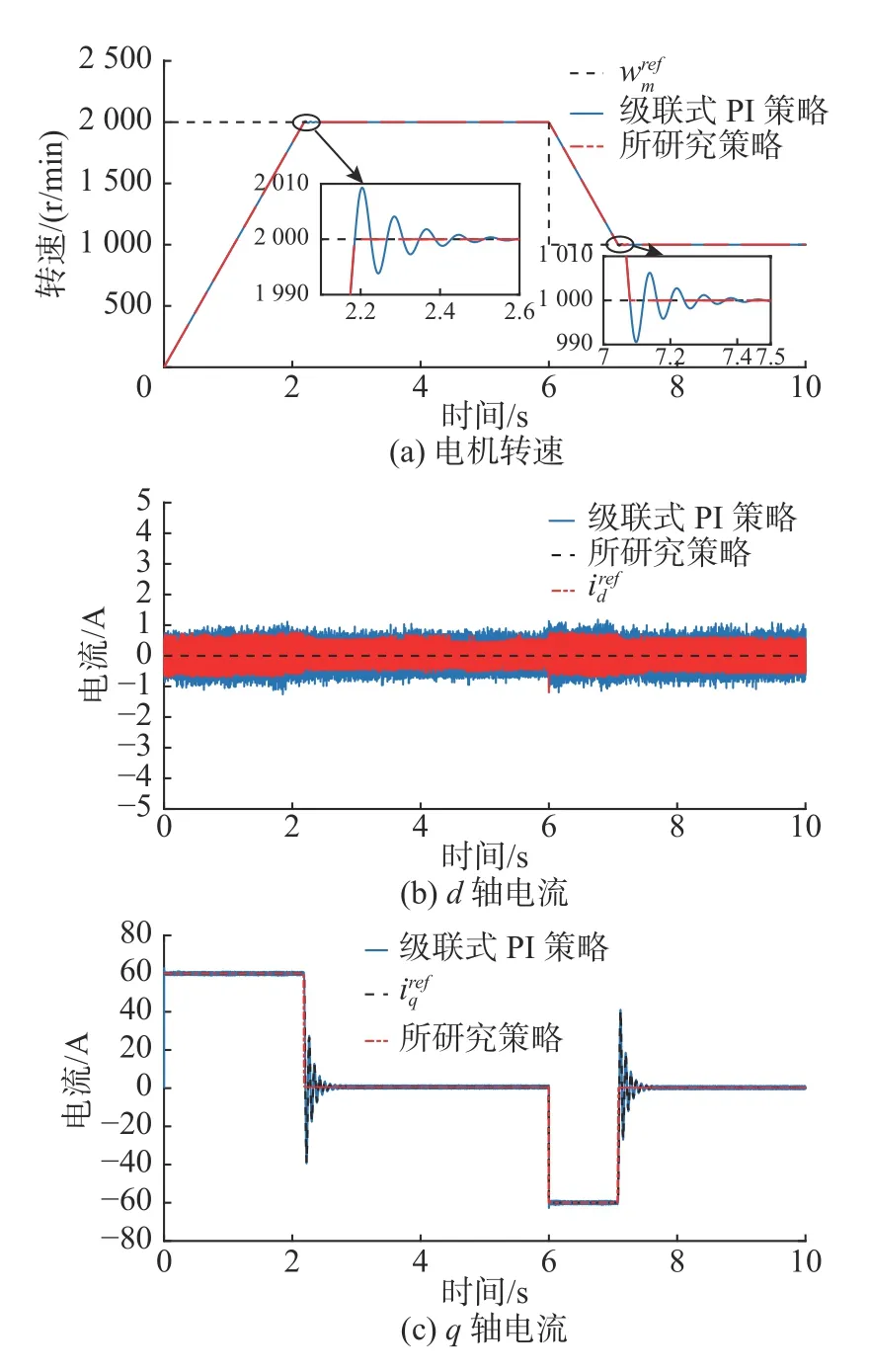
图3 2 种控制策略的仿真实验1 结果Fig.3 The simulation results of two control strategies of experiment 1
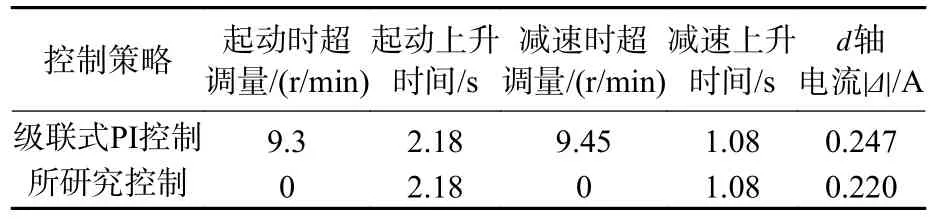
表2 仿真实验1 结果性能指标Table 2 The performance of simulation experiment 1
从图3(a)可以看出,级联式PI 控制策略在到达参考转速时电机转速存在波动,起动时超调量为9.3 r/min,减速时超调量为9.45 r/min。所研究控制策略能够快速跟踪给定参考转速,其起动和减速时均无超调量。如图3(b)和(c)所示,级联式PI控制策略下的d-q轴电流能够跟踪其参考电流,其中d轴电流平均绝对误差 |Δ|为0.247 A。所研究控制策略的d轴电流平均绝对误差 |Δ|为0.22 A,同时id和iq都在设定的电流约束限幅内,证明了基于无差拍控制的电流约束算法的有效性。因此,级联式PI 控制策略和所研究控制策略都能够实现电机的转速和电流控制,所研究控制策略在转速控制的超调量和d轴电流跟踪控制性能指标略优于级联式PI 控制策略。
2)实验2:负载转矩突变实验
给定电机参考转速1 000 r/min,电机带载起动,负载转矩为20N·m。在电机转速平稳后,t1时刻负载转矩突变为1N·m,在电机转速再次平稳后,t2时刻负载转矩突变为20N·m,模拟UUV 推进电机受洋流等环境影响导致的负载突变,验证在外部负载扰动下控制系统的抗扰动性能。记录电机转速和电流控制数据,图4 为传统级联式PI控制器和所研究控制策略的仿真实验结果,表3为2 种控制策略的性能指标。

图4 2 种控制策略的仿真实验2 结果Fig.4 The simulation results of two control strategies of experiment 2
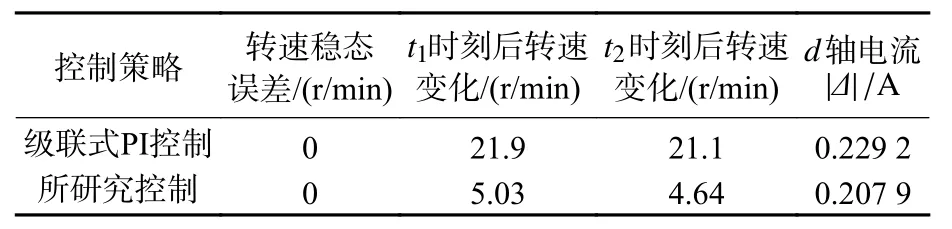
表3 仿真实验2 结果性能指标Table 3 The performance of simulation experiment 2
如图4(a)的电机转速跟踪曲线可以看出,2 种控制策略在电机带载起动过程中都能够快速逼近参考转速,且无超调量和稳态误差。在t1时刻电机负载转矩突然变小,级联式PI 控制策略的电机转速上升了21.9 r/min 后恢复到参考转速,所研究策略的电机转速波动了5.03 r/min 后收敛至参考转速。在t2时刻电机负载转矩突然变大,2 种控制策略的电机转速跌落,经调节后恢复至参考转速,其中级联式PI 控制策略电机转速跌落了21.1 r/min,比所研究控制策略的电机转速波动大。所研究的控制策略相比级联式PI 控制策略在转矩突变时电机的转速波动更小。从图4(b)和(c)明显可以看出,2 种控制策略的d-q轴电流可以跟踪电流参考曲线,但所研究控制策略的d-q轴电流波动更小。其中级联式PI 控制策略的d轴电流平均绝对误差|Δ|为0.229 2 A;所研究控制策略的d轴电流平均绝对误差 |Δ|为0.207 9 A。所研究控制策略的d轴电流跟踪效果较好。综上所述,所研究策略的积分模块对电机外部负载扰动具有抑制作用,能够补偿外部扰动量对控制器的影响。
3)实验3:电机参数变化实验
给定电机参考转速为2 000 r/min,电机带载起动,负载转矩为5N·m。同时修改PMSM 的参数,模拟UUV 长航时工作下导致的电机参数摄动,验证在电机参数变化下控制系统的鲁棒性。电机参数修改为:定子电阻Rs增大为0.056 6 Ω;直轴电感Ls减少至0.11 mH;转子磁链值 ψf减少至0.01 Wb;转动惯量J减少至0.035kg/m2。2 种控制策略的仿真实验结果如图5 所示,性能指标见表4。
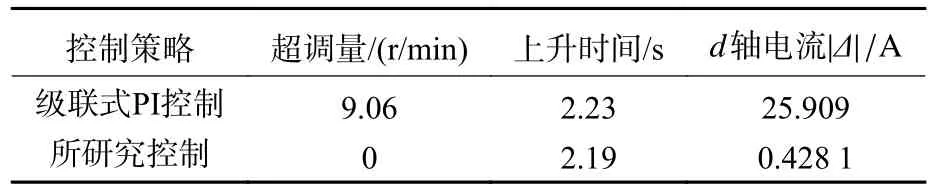
表4 仿真实验3 结果性能指标Table 4 The performance indexes of two controllers of experiment 3
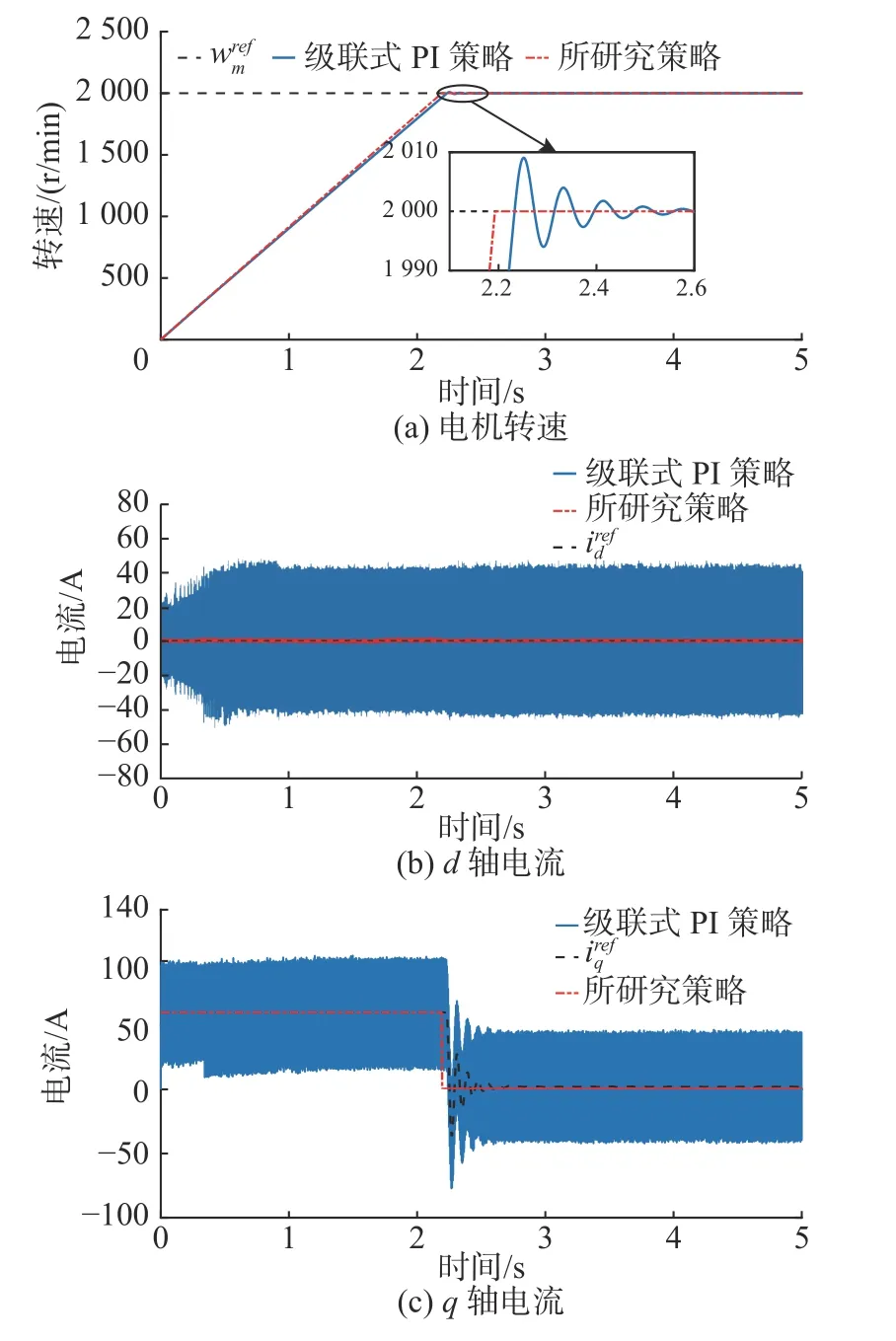
图5 2 种控制策略的仿真实验3 结果Fig.5 The simulation results of two control strategies of experiment 3
如图5(a)所示,在电机参数变化时,级联式PI 控制策略的PMSM 转速会产生9.06 r/min 超调,上升时间为2.23 s;所研究控制策略下的电机转速无超调量,上升时间为2.19 s,均优于级联式PI 策略的控制效果。图5(b)和(c)表明,级联式PI 控制器下的电机d-q轴电流跟踪曲线波动较大。从表4中可知,所研究控制策略的d轴电流跟踪绝对平均误差为0.428 1 A,相比于级联式PI 控制器要小25.480 9 A。q轴电流跟踪曲线相比电机参数无变化时毛刺更多,但所研究控制策略明显优于级联式PI 控制器的实验结果性能指标。综上所述,所研究控制策略由于在控制律加入了电流的误差积分结构,能够抑制内部参数摄动对系统的影响,使得控制系统具有较强的鲁棒性。
4 结束语
文中提出了一种基于NGPC 的PMSM 单环控制策略,实现了PMSM转速-电 流鲁棒控制,为UUV 用PMSM 提供了一种强鲁棒控制的解决方案。通过将电流误差积分项引入NGPC 目标函数使控制律含有积分结构,能够消除外部扰动和参数摄动引起的稳态误差。同时采用基于无差拍控制原理的电流约束策略,避免了电流过大对电机和驱动系统造成损害。仿真实验结果表明,所研究控制策略与传统级联式PI 控制策略相比,控制结构更简单,参数更容易整定,在系统扰动下具有良好的动态性能和鲁棒性。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2019年4期)2019-10-10
自动化学报(2019年6期)2019-07-23
电子制作(2016年15期)2017-01-15
厦门理工学院学报(2016年1期)2016-12-01
贵州师范学院学报(2016年3期)2016-12-01
北京航空航天大学学报(2016年7期)2016-11-16
系统工程与电子技术(2016年4期)2016-08-24
系统工程与电子技术(2016年2期)2016-04-16
电源技术(2015年11期)2015-08-22