基于机器视觉的农业机械避障导航算法研究
2023-05-17 01:54马驰
南方农机 2023年11期
马 驰
(杨凌职业技术学院,陕西 杨凌 712100)
0 引言
随着我国科学技术的不断发展,精细农业凭借其资源消耗低、环境污染小的特点已成为我国农业现代化、信息化发展的必然趋势。为了达到避障和导航的目的,必须对环境进行感知,在完全或不完全的情况下利用感应器获得周围的环境信息,如障碍物的大小、形状、位置等。其中,自主导航技术在精细农业中占有重要地位,目前应用最广泛的有GPS 技术、多传感器融合技术和机器视觉技术。这类技术具有较高的性价比,同时也能最大限度地减少因干扰造成的影响,因此在近年来一直是导航领域的一个热门课题[1]。
基于农业机械的运动规律,可以根据障碍物的位置、大小等信息,给出一种新的避障算法。基于单障碍物避障算法,根据农机工作平台的安全运行面积来确定避障路径,可帮助农机在有障碍物的情况下顺利地进行作业。国内外的专家、学者对农业机械的导航技术进行了较深入的探讨。欧美地区发展较快,瑞典学者BjprnAs-trand 等提出了一种基于Hough 变换的具有很强鲁棒性的作物行识别方法,该方法可以有效地克服杂草的干扰,实现较好的避障效果,但仅能对规则平直的作物行进行定位[2]。比利时学者V. Leemans 等对两种基于机器视觉的导航算法进行了对比:第一个试验采用Hough 变换与递推滤波相结合,取得了良好的效果;第二次试验所获得的影像包含若干平行,在此基础上结合行距等先验知识提出了一种新的Hough 转换方法,该方法可以较好地检验种子行的真实性和准确性,同时也能为后续避障工作的开展提供一定的基础[3]。当前,我国学者针对机器视觉的农业机械避障导航算法的研究也在不断地深入当中,并获得了良好的效果。中国农大李茗萱、张漫等针对目前的导航路抽取算法存在的外部干扰、处理速度缓慢等问题提出了一种新的导航路抽取方法。该方法基于传统的图像处理技术,能够保证农业机械运行时达到较好的避障和线路的提取效果。但总的来说,由于当前我国农业种植的特点以及农田环境结构性的多样性影响,导致针对机器视觉的农业机械避障导航算法的研究还存在一定的不足,无论是理论还是实践方面还有较大的发展空间。因此,本研究将以机器视觉的农业机械避障导航算法为出发点,提出一种新的提取算法模式,以期为精细化农业种植工作的开展提供一定的指导。
1 图像采集设备和系统标定原理
1.1 图像采集设备及材料
本研究所使用的影像采集装置是陕西维视数字图像技术有限公司的MV-VD030SC 型工业摄影机及AFT-0814MP 镜头,所获取的影像尺寸为640×480,可设定不同的颜色。用于图像处理的电脑是Intel(R)核心(TM)i3,具有3.1 GHz 的主频和2 G 内存;采用Microsoft Visual C++6.0 对算法进行了研究,并对其进行优化。
1.2 机械避障导航系统的标定
机器视觉技术是一种综合技术,其目的是利用摄影机将世界坐标中的物体转化成影像坐标,并通过校准确定其位置关系,然后对影像进行正确的处理,从而获得所需的资料,并将其反馈给对应坐标中的目标[4]。摄像机标定常用坐标系如图1所示。
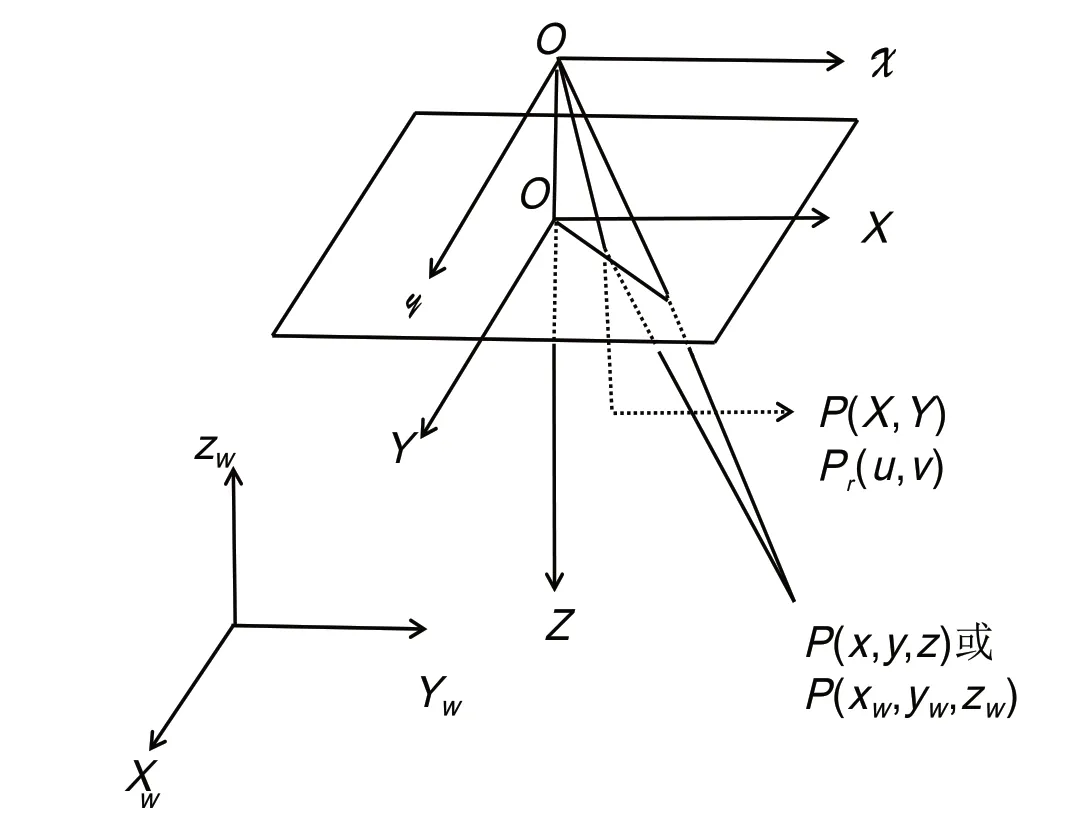
图1 摄像机标定常用坐标系
机器视觉中包含了XW、YW、ZW、相机坐标系(X、Y轴分别与照相机坐标系的x、y轴平行),影像像素坐标系的原点位于影像的左上方,以像素表示。
1)分析世界坐标与摄像机坐标之间的转换关系如下:
2)分析坐标系与摄像机坐标系之间的转换关系如下:
3)将公式(2)中的物理坐标系直接转换为图像坐标系,具体关系如下:
综合上述几点关系的转换,得出物点P与图像像素坐标系点Pr的转换关系如下:
4)总结世界坐标系与图像坐标之间的关系如下:
2 图像处理及避障导航数据的提取
2.1 算法原理
农作物种植中的水稻品种具有明显的垄沟效应,但不同地区的绿色植物和土壤背景差异较大。首先,通过绿线算法可以有效地对图像中的有效信息进行有效利用,同时还可以对目标和背景进行初步识别,从而减少大量的数据,方便后续的处理。其次,在灰度图像中,由于使用了灰度值的特性,所以使用二值化技术可以更清晰地提取出农作物的数据。再次,通过一系列的形态学方法,从二值化图像中提取出真实的导航轨迹,并对导航线进行校正。最后,将可靠的导航信息反馈给计算机,实现真实的实时导航[5]。
2.2 图像处理及导航数据提取
2.2.1 灰度化
与灰色图像相比,彩色图像含有更多的有用信息。为提高后期处理的速度,首先要对图像进行灰度化处理。综合本研究农业种植的实际情况,选择以麦田为实验对象,麦田和农田有很大的区别,庄稼行的绿色特性十分显著,而土壤则是棕红色。常规灰度处理如图2 所示,处理之后的效果并不明显,加上原始图像中的植物线条明显模糊,因此不宜使用。

图2 常规灰度处理
利用传统的超绿因子对农作物和农田的色彩特性进行了灰度处理,超绿因子处理如图3 所示。虽然该方法可以更好地区分目标和背景,但是其效果并不理想。通过试验和分析,在考虑了颜色空间的R、G、B 成分的基础上,提出了一种基于0 R—1.8 G—8 B的新的超绿因子来实现彩色图像的灰度处理。试验结果表明,该方法比一般的灰度化方法效果显著提高,识别度高、噪声小,能够为后续的处理提供极大的便利。

图3 超绿因子处理
2.2.2 图像分割
Otsu 是一种典型的图像分割方法,具有运算量小、不受图像亮度等因素影响、自动性强等特点。在图像分割中阈值法具有运算量小、运算速度快等特点。由于前期的灰度化效果较好,因此两种方法的处理结果是一样的。这些模型都能将目标和背景区域区分开来,且噪声对其影响很小。然而,在处理速度上,使用门限方法要比Otsu 方法快得多,所以本研究使用了205 的阈值灰度化方法,以提升后续避障运行的实际效果。
2.2.3 避障导航线提取
由于作物的非结构性特征,在不同的行间存在着较多的小杂音,而在作物行中也存在着少量的小孔噪声[6]。但由于这些噪声与作物的行区相比比较小,因此可以通过形态学的方法进行滤波,选择合适的形态学处理模板可以有效避免或排除作物行间的有用信息[7-8]。采用3×3 矩形模板对二值图像进行分析,确定了腐蚀、膨胀、开、关运算的结构、运算顺序和运算次数,得到了连续、无噪声的农作物行目标。在避障导航线提取的过程中,为了保证导航数据提取的精准度,需要对现有提取出来的图像信息进行优化,即可得到最终的数据信息[9]。
在田间导航的研究中,已有大量的研究人员对农作物的全部数据进行了提取。主要作物行的精细化提取图像信息结果如图4 所示,由于摄像机位于机器的中部,所以在正常步行过程中所拍到的影像也是对称的。因此,在保证导航信息精度的基础上,选取了两排最关键的两行作物作为导航参考。如果发生了偏移,则中间两排作物的位置也会发生较大的改变。在此基础上,利用改进的Hough 转换算法,实现了作物行的线性拟合;Hough 转换参数θ空间从0°~180°的变化范围改为45°~135°的缩减计算区域,减少了计算量,但保证了测量的准确性。由于相机的角度不同,农田中的平行作物会出现一些倾斜,需要校正。
图4 精细化提取图像信息
2.3 避障导航信息反馈及航线提取
摄像机应位于两个目标线的正中央,一般情况下以图像中心为导航点。在导航线修正后利用两导航路的纵轴和影像中心纵坐标之差,求出了两导航路的偏移幅值。导航点的偏移是以像素为单位进行的,利用三坐标系间的对应关系进行转化,可以得到实际的距离,并为农业机械避障导航校正提供依据[10]。
3 实验结论分析
本研究使用机器视觉的农业机械避障导航算法对田间农作物进行实验分析,在路线规划模块中引入了相对距离和方向信息,实现了实时的路障规避。在确定了避障路线后,采用纯跟踪算法跟踪该避障路线,从而实现了避障目的。本研究采用慢速实验对田间农作物中的障碍物进行检测,速度分别为0.5 m/s、1.0 m/s进行试验,实验行走路径如图5所示。

图5 实验行走路径
实验中,GPS 接收机采用RTK 法在障碍物上测量了障碍物的中心点位,其坐标为:@=4 787.3 m,Y=3 316.9 m。由于拖拉机在行驶时,地面坐标系统下障碍物中心点的测量存在误差。因此,所测得的中心坐标(X=4 787.5 m,Y=3 316.7 m)的最大误差为0.28 m时,试验车速0.5 m/s,符合避障试验的需要。
文中所提出的障碍物检测方法可以有效地进行障碍物的识别与拟合,尽管有一些错误,但大部分都能用算法进行过滤,从而证明了算法的正确性。实验中,GPS 接收机采用RTK 法在障碍物上测量了障碍物的中心点,其坐标为:@=4 786.94 m,Y=3 317.79 m。在障碍物的实时探测中,最大误差为0.36 m 时试验车速1.0 m/s。在1.0 m/s 的车速下,由于机械在农田中高速行驶会产生较大的振动,从而降低了对障碍的探测准确率。
在两种不同车速下进行了现场测试,结果证明本研究所提出的障碍物探测方法能够达到测试的目的。最终结果表明,本文所提出的障碍物检测方法能够在不同的车速情况下,对障碍物的方向和形状进行精确的识别,具有很好的适用性。
4 结语
1)基于机器视觉的农业机械避障导航算法能够较好地克服农业种植过程中出现的障碍物的干扰[11],准确地提取出农田中的作物行驶方向和距离,为以后的处理打下了良好的基础。
2)通过对主要作物行的抽取,可以降低运算量,加快运算速度,并不会对机械避障导航信息的抽取造成影响,同时Hough 变换的优化和快速的运算能力也得到了极大的提高[12-13]。
3)本研究提出了一种基于平均的方法,能够得到障碍物的位置及形状信息,通过采用平均法获得障碍物的距离、形状等信息,但由于存在一定的噪声干扰,导致检测结果产生了很大的误差。
4)目前对于障碍物的检测只考虑了静态障碍物的情况,并且只考虑了离航向最近的障碍物为有效障碍物,动态路径规划时仅根据此障碍物进行关键点选择。如果田间障碍物情况分布复杂,该方式可能无法得到一条安全的避障路径,在后续的研究中应对田间多障碍、动态障碍进行考虑。
5)在某些特定的条件下(如杂草太多、天气恶劣),该方法无法有效地提取出农作物的行间以及障碍信息。目前已有的研究仅限于障碍物导航路的抽取,因此需要进一步改进算法的自动机制和反馈机制。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
高技术通讯(2021年3期)2021-06-09
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
四川农业与农机(2019年4期)2019-08-29
自动化学报(2017年5期)2017-05-14
光学精密工程(2016年1期)2016-11-07
工业设计(2016年7期)2016-05-04
工业设计(2016年4期)2016-05-04
河南科技(2014年1期)2014-02-27