勺夹式藠头排种器设计与试验
2023-05-15 03:31康启新张国忠刘浩蓬唐楠锐刘婉茹
农业工程学报 2023年5期
康启新,张国忠,2,郑 侃,2,刘浩蓬,2,唐楠锐,刘婉茹,季 超
勺夹式藠头排种器设计与试验
康启新1,张国忠1,2※,郑 侃1,2,刘浩蓬1,2,唐楠锐1,刘婉茹1,季 超1
(1. 华中农业大学工学院,武汉 430070; 2. 农业农村部长江中下游农业装备重点实验室,武汉 430070)
针对藠头()种植劳动强度大、人工成本高等问题,该研究设计了一种由排种盘、取种勺、取投种凸轮、种箱、安装板等组成的勺夹式藠头排种器。对该排种器工作原理和取种、携种、投种过程进行理论分析,建立离散元仿真模型,对取种过程进行仿真分析,确定了最优种勺结构。以大叶藠为对象,以取种合格率和漏取率为试验指标,进行种勺直径、种勺深度、取种起始角、种面高度与种箱高度之比和取种速度5因素显著性筛选试验,并以种勺直径、取种起始角、种面高度与种箱高度之比为试验因素进行回归正交试验;采用Plackett-Burman试验法和Box-Behnken中心试验法建立取种合格率和漏取率的回归模型,并进行参数优化,获得最优参数组合为种勺直径27 mm、取种起始角30°和种面高度与种箱高度之比92.5%。在最优参数组合下进行台架试验,得到取种合格率91.17%,漏取率6.17%。田间试验结果表明在前进速度0.1~0.2 m/s的条件下,该排种器平均播种合格率、平均重播率和漏播率分别为63.10%、12.76%和24.14%。研究结果可为藠头播种机械的研究与设计提供参考。
离散元;响应面;排种器;勺夹式;藠头
0 引 言
藠头又名薤、荞头等,是百合科葱属多年生草本植物,主要分布在中国长江流域及以南地区,其地下茎富含蛋白质、可溶性糖等营养物质,目前全国种植面积已超过6.5万hm2[1-2]。藠头可食用也可入药,腌制加工后风味独特,大量出口日本、韩国等国家,是重要创汇特色蔬菜之一[3-4]。藠头种子形状不规则、个体大小不一,种植劳动强度大,人工成本高,严重影响农民种植积极性和藠头产业规模化发展,亟需开发先进适用的藠头机械播种技术与装备。
精量取种是藠头机械化播种的关键技术和农艺要求之一。当前排种器主要分为机械式、气力式两大类[5]。机械式排种器应用广泛,常用于外形较为规则的物料;气力式排种器适应性强且不易伤种,目前玉米、油菜、大豆、棉花等较小粒径种子的气力式播种技术研究已趋于成熟[6-9],但马铃薯、大蒜等不规则块状物料的精量播种尚存在较多技术难题[10-13]。吕金庆等[13]设计了一种舀勺式排种器,主要用于马铃薯精量播种。牛康等[14]设计了一种双层种箱式马铃薯排种装置,结构采用链勺式排种器并进行了性能优化。为进一步提高排种性能,吕金庆等[15]设计了一种气吸式马铃薯排种器,试验合格指数达到98.9%,但对装置密封性能及风量要求较高。崔荣江等[16]设计了一种勺链式大蒜取种器,取种效果较好。侯加林等[17]基于“去多留一”原则设计了一种爪式大蒜取种装置,提高了播种单粒率。链勺式和勺带式排种器通常适应于较大粒径不规则种子的取排种,结构简单,但易受振动影响造成漏种。藠头外形较马铃薯、大蒜更加复杂,目前尚未有针对藠头播种技术的研究与应用报道。
本文以湖北崇阳等地广泛种植的大叶藠品种为对象,根据其种植农艺要求设计一种勺夹式排种器,对取种勺的结构尺寸进行分析,利用离散元仿真软件EDEM对取种过程及取种勺夹结构参数进行仿真分析,采用Plackett-Burman试验法和Box-Behnken中心试验法进行台架试验,利用Design-Expert 12软件计算获取最优参数组合,并以此为基础开展田间验证试验,以期为藠头播种机械设计提供参考。
1 排种器结构与工作原理
1.1 排种器结构
勺夹式藠头排种器主要由种箱、驱动轴、主轴、排种盘、勺夹机构、凸轮等组成,如图1a所示。排种器由地轮或电机提供动力,通过链传动带动排种盘旋转。安装在排种盘一侧的种勺随排种盘在种箱内勺取藠种,经历携种护种后在投种盒上方投种。勺夹机构如图1b所示,由种勺、勺夹杆、扭力弹簧等组成,种勺用扁孔套装在勺夹杆扁头上;勺夹杆为“L”型曲轴,可绕其长轴的中心轴在上盖板和勺杆底座间转动并带动种勺开合。种勺旋转开合量由投种凸轮、取种凸轮和扭力弹簧共同控制。调整凸轮安装高度和位置,即可调节勺夹开合量和取投种位置,完成精量取种和准确投种。
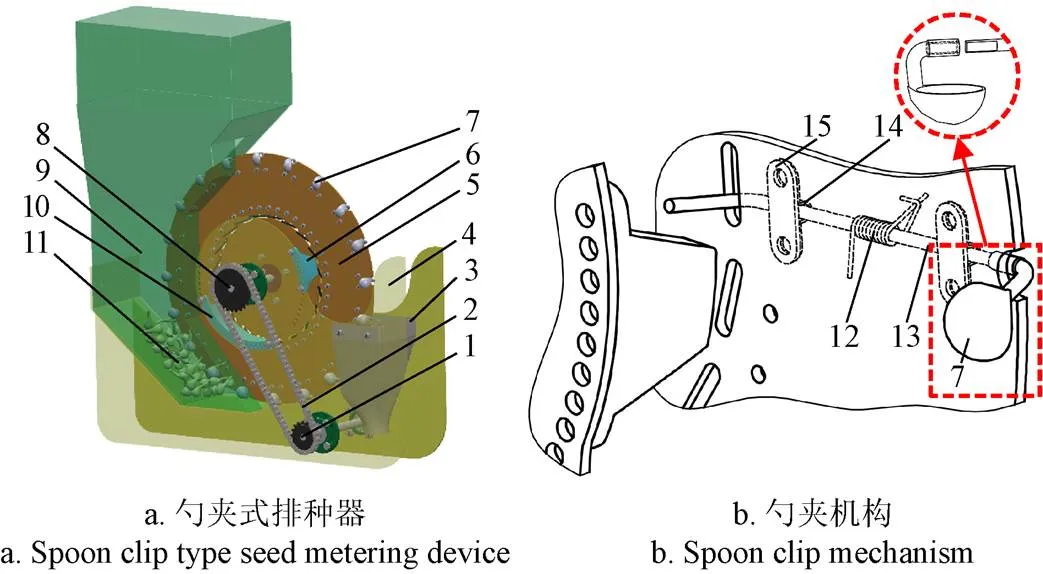
1.驱动轴 2.链条 3.投种盒 4.排种器安装板 5.排种盘 6.投种凸轮 7.种勺 8.排种器主轴 9.种箱 10.取种凸轮 11.藠头种子 12.扭力弹簧 13.“L”型勺夹杆 14.上盖板 15.勺杆底座
1.2 排种器工作原理
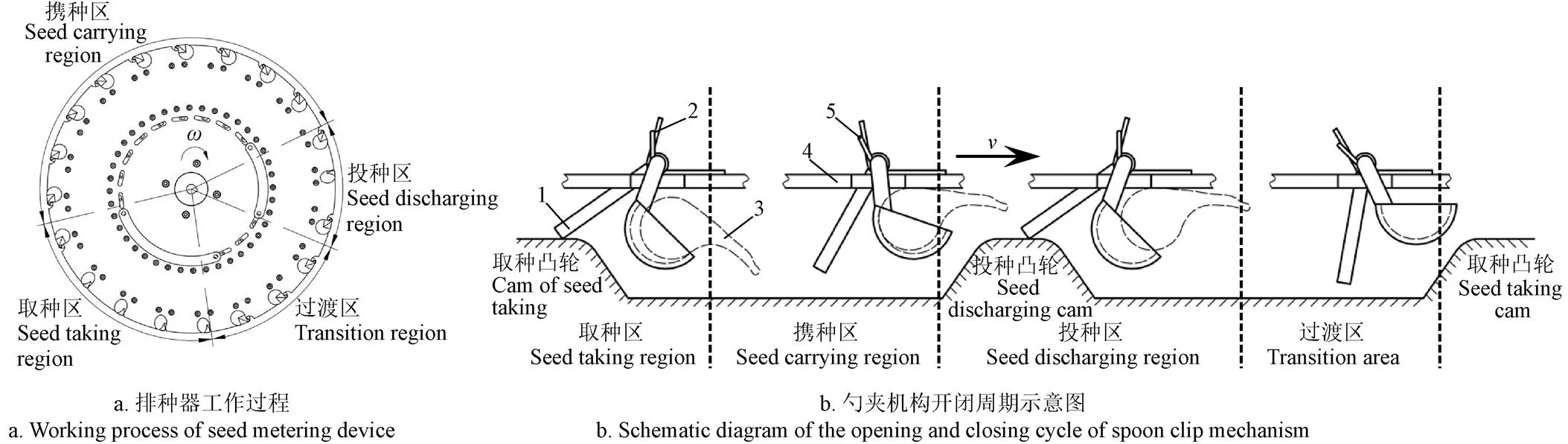
勺夹式藠头排种器工作过程及原理如图2所示。排种盘在垂直平面内转动,安装其上的勺夹机构先后经历取种、携种、投种和过渡4个区间。在取种区,“L”型勺夹杆尾端在取种凸轮斜面挤压下,克服扭力弹簧扭矩绕勺夹杆轴线顺时针旋转,勺夹杆前端种勺随之打开,藠头种子在种勺搅动下进入种勺与排种盘面间空腔中,完成充种。勺夹随排种盘继续回转进入携种区,此时“L”型勺夹杆尾端脱离取种凸轮表面,在弹簧扭力下绕自身中心轴逆时针旋转,种勺闭合,由于藠种位于种勺与排种盘面间,此时即被种勺夹紧,并随排种盘继续转动。勺夹进入投种区时,勺夹杆尾端开始接触投种凸轮斜面,勺夹在凸轮阻挡下再次旋转,种勺打开,藠种在重力作用下落入投种盒内,完成投种。此后勺夹随排种盘继续回转,与投种凸轮脱离接触,并在扭力弹簧作用下自行复位,进入过渡区准备开始下一个工作周期。
排种盘取种区、携种区、投种区和过渡区的起始位置由投种凸轮6、取种凸轮10安装位置确定与调整。勺夹机构的开闭周期示意如图2b所示。
1. “L”型勺夹杆 2.扭力弹簧 3.藠头种子 4.排种盘 5.弹簧挡杆
1. “L” shaped spoon clip rod 2.Torsion spring 3.Seeds of4.Seed metering disc 5.Spring retaining rod
注:为排种盘旋转角速度,rad∙s-1;为排种盘旋转线速度,m∙s-1。
Note:is the angular velocity of seed metering disc rotation, rad∙s-1;is the linear speed of seed metering disc rotation, m∙s-1.
图2 排种器工作原理
Fig.2 Working principle of seed metering device
2 关键部件设计
2.1 排种盘
排种盘为5 mm厚的不锈钢圆板,圆周上均布若干勺夹机构安装位,每个安装位由1个勺夹开孔、1个勺夹杆转动槽及4个螺栓安装孔组成。排种器种勺在排种盘一侧边缘均匀布置,排种盘边缘线速度即为取种速度。根据文献[18],精量穴播条件下,为保证穴距不随机组前进速度变化,需满足如下关系:
式中为穴距,m;m为地轮旋转角速度,rad/s;m为地轮半径,m;为排种器勺夹机构个数。
记地轮与排种盘旋转角速度比为,勺夹个数按照下式计算:
式中为地轮与排种盘旋转角速度比。
由前述结构及工作原理分析可知,为保证取种过程不发生干涉,相邻勺夹间距离应大于等于2倍藠种长度,结合式(2)有:
式中为排种盘半径,m;为藠种长度,m。
根据排种器工作要求,为提高排种器工作效率、增加排种器稳定性,需尽可能增加勺夹机构个数、提高机具前进速度、降低排种盘转速和取种速度。由式(2)和式(3)可知,当地轮半径m、播种穴距确定时,角速度比增大,排种器勺夹机构个数增加,排种盘半径增大。为此,结合式(3)引入如下关系式:
式中vm为机具前进速度,m/s。藠种长度L平均值43.47 mm[19],藠头种植穴距s通常为0.10~0.13 m,结合农艺要求取0.1 m;选取常用半径Rm为0.2 m的地轮,将上述参数值代入式(4),绘制取种速度与前进速度的比值与角速度比k的关系曲线,如图3所示。
根据排种器设计要求,结合角速度比与取种速度和前进速度之比的关系曲线,考虑在增加取种勺夹个数情况下尽量减小排种器结构尺寸,尝试将=2带入式(2),在m=0.2 m,=0.1 m的情况下得勺夹个数约为25,此时排种盘半径约为0.347 m,尺寸偏大。为减小排种器结构尺寸,取勺夹个数为20,此时排种盘半径圆整后为0.3 m,转速比为1.59,根据已知条件和式(2)得出排种盘取种速度与机具前进速度关系式为
参考大蒜播种机前进速度[18],代入式(5)求得本文排种器取种速度范围0.06~0.14 m/s。
2.2 勺夹机构
2.2.1 种勺
如图4所示,藠头种子鳞茎膨大部位为类椭球形,有长柄,整体成水滴状。种勺形状和尺寸直接影响藠头种子夹持接触形式和夹持效果,进而影响排种器作业精度。基于夹持过程中种勺与藠头种子“平面—曲面”与“曲面—曲面”的接触情形,将种勺设计为图5的3种形式:平板式、锥勺式和圆勺式。平板式种勺充种空间大,与单粒藠头种子有效接触面积小;锥勺式和圆勺式种勺充种空间较小,但单粒有效接触面积大,锥勺式形状较复杂,但与圆勺式相比增加了藠种长柄部分的接触空间。
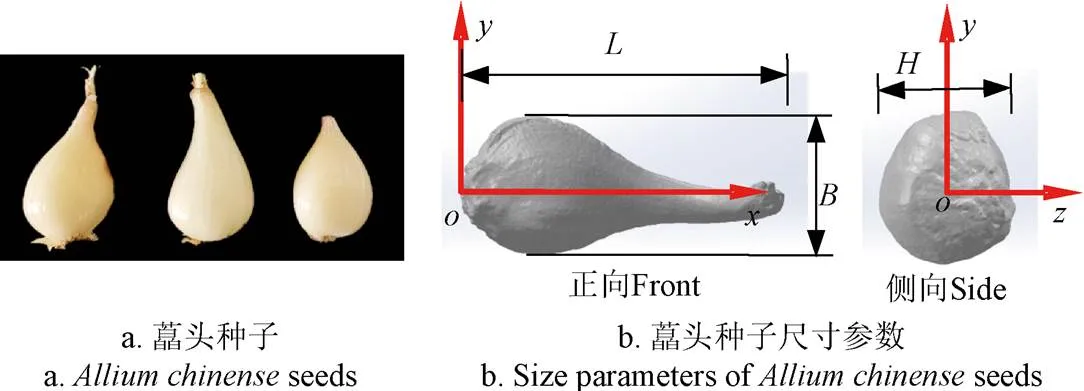
注:以种子根部中心为原点,穿过球茎且指向鳞芽方向为x轴,垂直x轴向上方向为y轴正方向,垂直x轴且指向观察侧方向为z轴建立笛卡尔坐标系,藠头种子沿x轴向的最大尺寸为长度L,在y轴上的最大尺寸为宽度B,在z轴上的最大尺寸为厚度H。

注:Dp为圆勺直径,mm。
在种勺搅动运动下,藠头种子球茎或果柄进入种勺与排种盘形成的夹持空间而被种勺夹持。果柄部分细长、受力面积小易掉落,且较为脆弱,球茎部分则有较好的抗挤压性能,故球茎宽度或厚度方向宜作为主要夹持方向。单粒藠种进入夹持空间随排种盘一起转动,受力分析如图6所示。
由图6可知,充种空间内单粒藠头种子受自身重力,种勺和排种盘的支持力,各作用力之间满足如下关系:
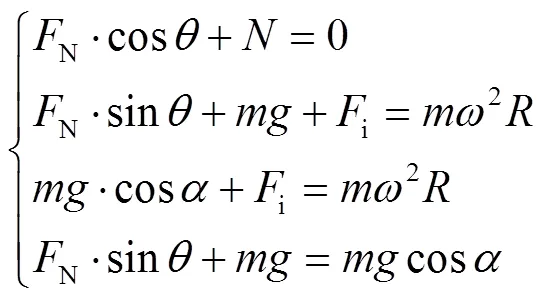
根据图6,由于排种盘匀速旋转,重力分量cos随旋转角度变化,故存在种勺及排种盘对藠头种子施加指向排种盘圆心的被动力i,i和cos共同提供向心力,当勺夹未离开箱内种面时,周围种子对充种空间内种子的作用力也提供向心力。由式(6)可知,勺夹取种后逐渐减小,重力分量cos增大,Nsin、N、也随之增大,i减小。当勺夹杆尾端离开取种凸轮后,勺夹瞬时关闭将充种空间内种子夹紧,勺夹张角瞬间减小,此时不变,支持力N转换为扭力弹簧带动种勺提供的夹持力。可见,种勺结构和尺寸、排种盘旋转角度,种箱内种子分布等因素与藠种受力密切相关,并对夹持性能产生影响。
注:以藠头种子质心为点建立空间直角坐标系,轴为正视取种侧水平向右,轴竖直向上,平面与排种盘平行,轴垂直于平面向外。1为排种盘圆心在平面的投影;为N及其分力所在平面与平面间的夹角,(°);为勺夹取种张角(N与轴负方向夹角),(°);N为取种勺底部对藠头的支持力,N;为排种盘对藠头的支持力,N;为藠头种子质量,kg;i为种勺对藠头种子除底部支持力外的合力,N。
Note: The center of mass ofseeds is the-point to establish a right-angle coordinate system in space, the-axis is orthogonal to the seed taking side horizontally to the right, the-axis is vertically upward, and theplane is parallel to the seed metering disc; the-axis is perpendicular to theplane outward.1is the projection of the center of the seed metering disc in the plane;is the angle between the plane whereNand its component forces are located and theplane, (°);is the seed filling angle with spoon clip (the angle betweenNand the negative direction of-axis), (°);Nis the support force onat the bottom of the spoon, N;is the support force onat the seed metering disc, N;is the mass ofseeds, kg;iis the combined force onseeds at the spoon except for the support force at the bottom, N.
图6 取种区藠头种子受力分析
Fig.6 Force analysis ofseeds in seed taking region
根据前期研究,大叶藠种长、宽、厚平均值约为43.47、21.68和18.28 mm,为减少重播概率,选取厚度作为种勺尺寸的主要限制条件[19]。根据农艺要求,藠头每穴播种1~2粒,圆勺直径和平板及锥勺宽度p与种子厚度需满足:
式中pMIN为圆勺直径和平板及锥勺宽度的最小值,mm;pMAX为圆勺直径和平板及锥勺宽度的最大值,mm。
按照式(7)pMIN和pMAX分别取20、30 mm。平板式种勺深度设置为5mm以保证其具有一定强度,锥勺式和圆勺式种勺的最大深度取为0.5pMAX即15 mm,以保证足够接触面积;平板和锥勺的长度均设置为45 mm,大于藠头种子平均长度,以增加取种成功率。
种勺在取种过程中呈打开状态,此时的临界尺寸条件如图7所示。为便于充种,种勺张开后形成的充种空间在种勺与排种盘面间的距离的最小临界值取藠头种子宽度方向的平均尺寸。充种空间在种勺与排种盘面间的距离的计算如式(8)~(9)所示。


注:1为圆勺式种勺充种空间与排种盘间的距离,mm;2为平板式或锥勺式种勺充种空间与排种盘间的距离,mm;o为不同种勺参考点的旋转半径,mm;s为平板式种勺的长度,mm;为o与竖直方向重合时的旋转角,(°);1为种勺旋转中心轴与排种盘一面的距离,mm;2为种勺旋转中心轴与种勺上端面的距离,mm;3为种勺旋转中心轴与种勺边缘的水平距离,mm。
Note:1is the distance between the seed filling space of round spoon and the seed metering disc, mm;2is the distance between the seed filling space of flat spoon or taper spoon and the seed metering disc, mm;ois the rotation radius of the reference point of different kinds of spoons, mm;sis the length of the flat type spoon, mm;is the rotation angle whenocoincides with the vertical direction, (°);1is the distance between the rotating center axis of the spoon and the side of the seed metering disc, mm;2is the distance between the center axis of rotation of the spoon and the top plane of the spoon, mm;3is the horizontal distance between the central axis of rotation and the edge of the spoon, mm.
图7 勺夹取种张角的临界条件
Fig.7 Critical condition of the seed filling angleof the spoon clip
取藠头种子宽度方向的平均尺寸21.68 mm,勺夹的1、2、3分别为10.5、15和5 mm。由圆勺取种临界条件可知,此时种勺直径p为20 mm,进而由勾股定理及式(8)可得为45°时,可取最大值20.71 mm,近似满足临界条件中藠头种子尺寸需求。选取平板式或锥勺式种勺时,种勺长度s为45 mm,由勾股定理及式(9)可知,勺夹最大旋转角≥20.17°即可满足临界条件。综上,确定勺夹取种张角为45°,以满足不同种勺的取种需求。
2.2.2 勺夹扭力弹簧
勺夹的闭合动力与携种时藠头种子所受夹持力均由扭力弹簧提供,其一端与排种盘固定,另一端与勺夹杆的弹簧挡杆固定。夹持携种过程中,夹持力过小,藠头种子容易脱落;夹持力过大,藠头种子受挤压严重,易造成压缩损伤,且勺夹在关闭时会产生较大冲击,影响种勺使用寿命。图8为勺夹在工作过程中闭合、夹持和开启状态下的受力分析。
为简化分析,忽略夹持携种过程中藠头所受静摩擦力,采用共点力系,平稳携种条件下勺夹杆中心轴所受力矩平衡方程如式(10)所示。
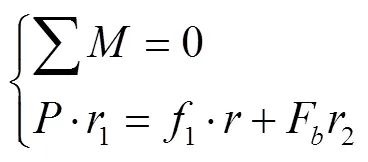
投种时,勺夹杆尾端在投种凸轮上匀速平稳滑动,勺夹杆中心轴所受力矩仍平衡,即:

式中为勺夹杆中心轴力矩,N·mm;为勺夹杆半径,mm。
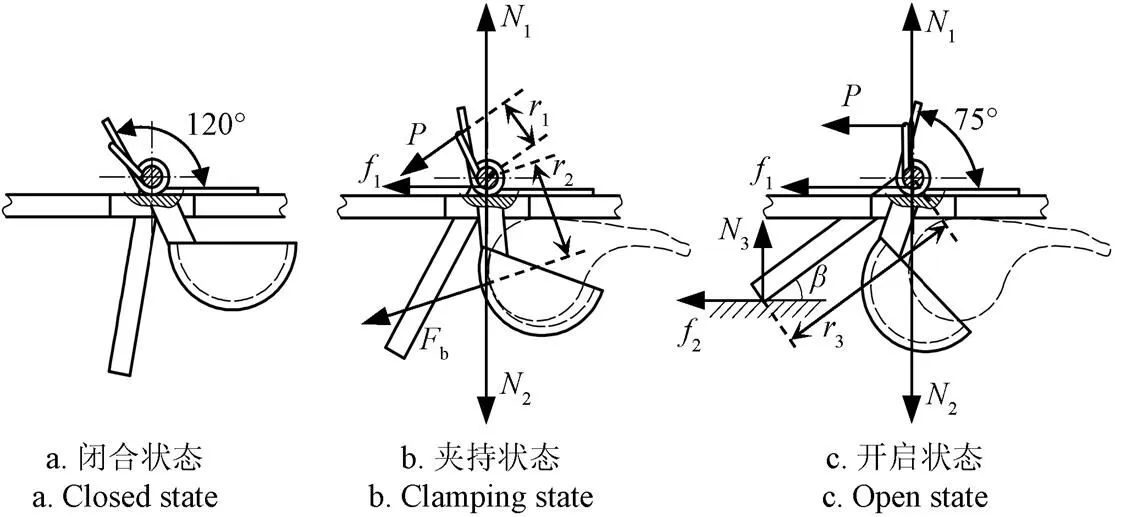
注:P为弹簧扭力,N;f1为排种盘对勺夹杆摩擦力,N;Fb为种勺受藠头的作用力,N;N1为勺杆底座对勺夹杆的支持力,N;N2为上盖板对勺夹杆的支持力,N;r1为弹簧作用力臂,mm;r2为藠头种子与种勺作用力点到勺夹杆中心轴距离,mm;N3为投种凸轮对勺夹杆尾端支持力,N;f2为投种凸轮对勺夹杆尾端摩擦力,N;r3为勺夹杆末端到其旋转轴的距离,mm;β为勺夹杆尾端与投种凸轮夹角,(°)。
b与携种过程中藠头种子所受支持力为作用力和反作用力的关系。在携种过程中,作用力b、弹簧弹力和摩擦力1与勺夹杆中心轴的转矩平衡;在投种过程中,弹簧弹力和摩擦力1与投种凸轮对勺夹杆尾端产生的摩擦分力2、支持分力3的合力矩平衡。由式(10)可知,b的大小与夹持位置相关,作用点距离勺夹杆中心轴越近,b越大。
根据上述分析可知,忽略排种盘对勺夹杆摩擦力1时有如下受力关系:
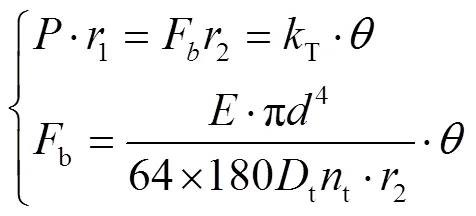
式中T为弹簧扭矩系数,N·mm/(°);为弹簧材料弹性模量,MPa;为弹簧线径,mm;t为弹簧中径,mm;t为弹簧圈数。
由式(12)可知,夹持力与弹簧扭转角度成正比,为避免最小夹持力与最大夹持力差距过大,影响藠头种子夹持可靠性,应使T尽可能小。夹持力b最小应能使摩擦力克服重力提供向心力,以保证匀速圆周运动,即:
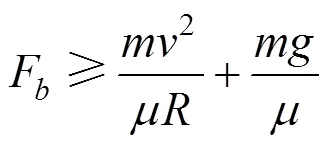
式中为藠头种子与排种盘间摩擦系数。
根据前期研究,如种勺稳定夹持两粒较大藠头种子,排种盘最大旋转线速度为0.3 m/s,种子与排种盘间摩擦系数为0.53,此时夹持力应不小于1 N。夹持力b最大应小于藠头种子的压缩极限89.2 N[19]。故弹簧结构参数应使夹持力满足如下临界条件:
式中为藠头种子压缩极限,N。由2.2.1节及式(12)可知,选取平板式或锥勺式种勺且张角为20.17°时,弹簧所提供的夹持力最小,此时2为52.2 mm;选取圆勺式种勺且张角为45°时,夹持力最大,此时2为21.2 mm。
根据勺夹机构整体设计,扭力弹簧内径为5 mm,弹簧中径t为5+,其中弹簧线径不超过勺杆底座的厚度2 mm;弹簧螺旋长度不宜超过30 mm,根据式(14)及上述条件可得弹簧线径为2 mm,螺旋圈数为9,结合勺夹机构装配要求,弹簧两脚夹角为120°。此时由式(12)可知弹簧可提供最大夹持力为2.85 N,小于藠头种子的压缩极限89.2 N[19],满足低损播种需要。
2.3 凸 轮
勺夹杆转动依靠凸轮与勺夹杆尾端之间的相对运动实现,凸轮是控制勺夹杆转动时间以及角度的关键部件。凸轮由螺栓固定在安装板上,安装位置可以在一定角度范围内绕排种盘中心调整。取投种起始位置为勺夹完全打开时勺夹杆的位置,取投种起始角为取投种起始位置与图9中虚线位置的夹角,安装位置对应的取投种起始角为0°。
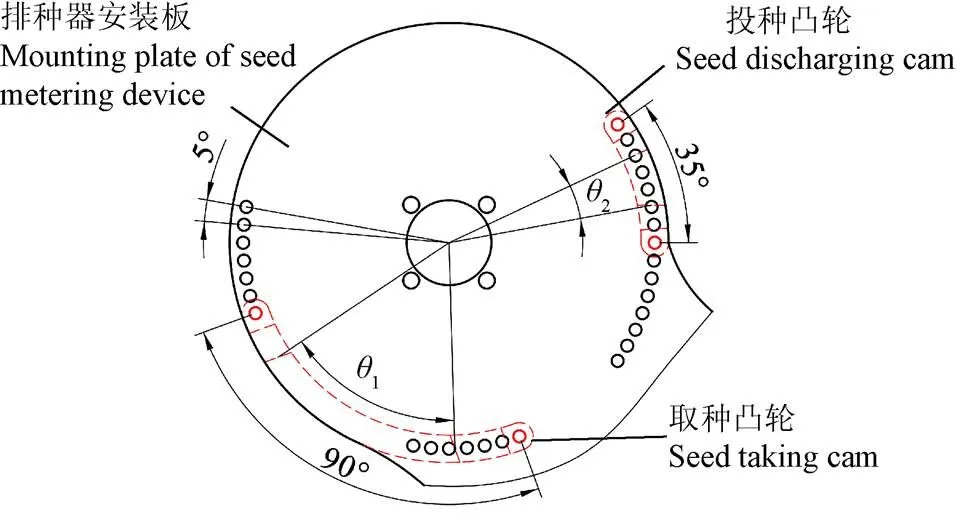
注:θ1为取种凸轮的工作角,(°);θ2为投种凸轮的工作角,(°)。
勺夹进入种箱后不断深入种群进行取种,勺夹从进入种箱开始随排种盘转过90°后开始逐渐远离种子群,此过程中若种勺不闭合,则种子易在搅动中脱离充种空间,故凸轮的取种范围不应大于90°。将取种凸轮安装孔中心所在弧角度设计为90°,除去固定孔位及斜面缓开缓闭区域,取种凸轮的工作角1为57°。极限取种范围中除去工作角1可知取种起始角的调节范围小于等于33°,结合装置结构及安装尺寸设计其可调范围为0°~30°,调节间隔为5°,取种凸轮的工作范围可在87°的取种范围内调节。
为避免种子在投种过程中产生干扰,影响投种精度,应保证每个勺夹单独投种,即投种凸轮工作角2小于勺夹间的夹角,设置20个勺夹时,相邻勺夹间夹角为18°。投种凸轮工作角2应小于等于18°,加上一定的斜面快开快闭区域及安装孔位后,投种凸轮安装孔中心所在弧角度圆整为35°,工作角2为13°。安装板上设置一定的投种起始角调节范围为0~35°,加上工作角2可得投种范围为48°,投种凸轮的工作范围可在投种范围内调节。
勺夹杆尾端在与凸轮接触过程中,需保证凸轮宽度始终大于拨杆直径,凸轮中心弧半径与勺夹杆尾端旋转轨迹半径相同,故取凸轮宽度为20 mm,中心弧半径为150 mm。根据排种器结构,当勺夹完全张开取种张角为45°时,勺夹杆末端与安装板距离为54 mm,故取凸轮高度为54 mm。取投种凸轮结构如图10所示。
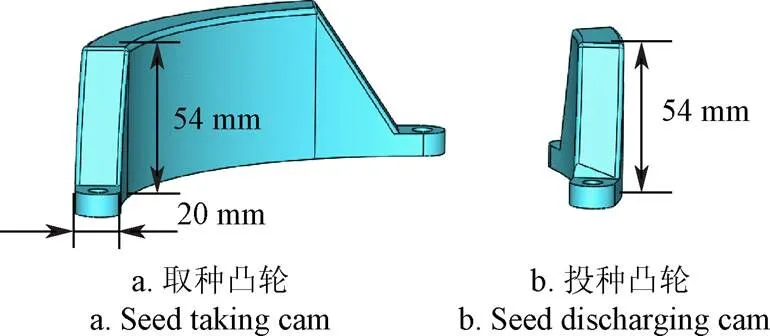
图10 取投种凸轮
2.4 种勺形状仿真优化
为分析不同形状种勺间的性能差异,采用离散元分析软件EDEM[20-23]对排种器不同结构种勺的取种性能进行仿真分析[17]。为尽可能满足实际取种时种子几何尺寸的差异,在仿真中应用颗粒工厂将藠头种子以0.9、1.0、1.1倍大小按照20%、50%和30%占比随机分布,以5 kg/s的速度共生成藠头种子7.5 kg。
藠种间和藠种与种勺间无黏附作用,颗粒间及颗粒与种勺间的接触模型均采用Hertz-Mindlin(no-slip)模型[24-26]。藠头种子仿真参数依据前期标定试验结果设置,具体如表1所示。

表1 仿真参数设置
应用EDEM软件模拟不同种勺结构在不同转速下的取种效果,以取种合格率和漏取率为指标。取种1~2粒藠种的次数占总取种次数的比例为取种合格率,未取种次数占总取种次数比例为漏取率。试验中排种器取种速度为0.06~0.14 m/s。圆勺直径和深度均为30 mm;平板勺宽度和深度分别为30和5 mm;锥勺宽度和深度均为30 mm。仿真过程如图11所示。
在仿真过程中,不同种勺均出现了如图11d、11e所示的取种情况。由图12试验结果可知,圆勺式取种合格率在不同速度下均优于其他2种种勺,并稳定在85%以上,平均取种合格率为91.14%,平均漏取率略高于其他2种种勺,为2.2%。通过方差分析可得,种勺类型对取种合格率有极显著影响(<0.01)。3种形式种勺的取种合格率在取种速度达到中间水平时有较高值,漏取率有较低值,取种速度为0.1 m/s时的取种性能更好。取种速度对取种合格率无显著影响(<0.05)。平板式和锥勺式种勺虽然有较低的漏取率,但由于充种空间大,取种过程中3粒及以上取种次数较多,造成取种合格率低,不能满足需求。平板式、锥勺式、圆勺式的平均单粒率(每次取种1粒次数占总取种次数比例)分别为33%、24%和68%,圆勺式种勺的单粒取种性能更好,有利于节约种子。综上,圆勺式种勺在取种合格率和单粒率上具有优势,为优选结构。
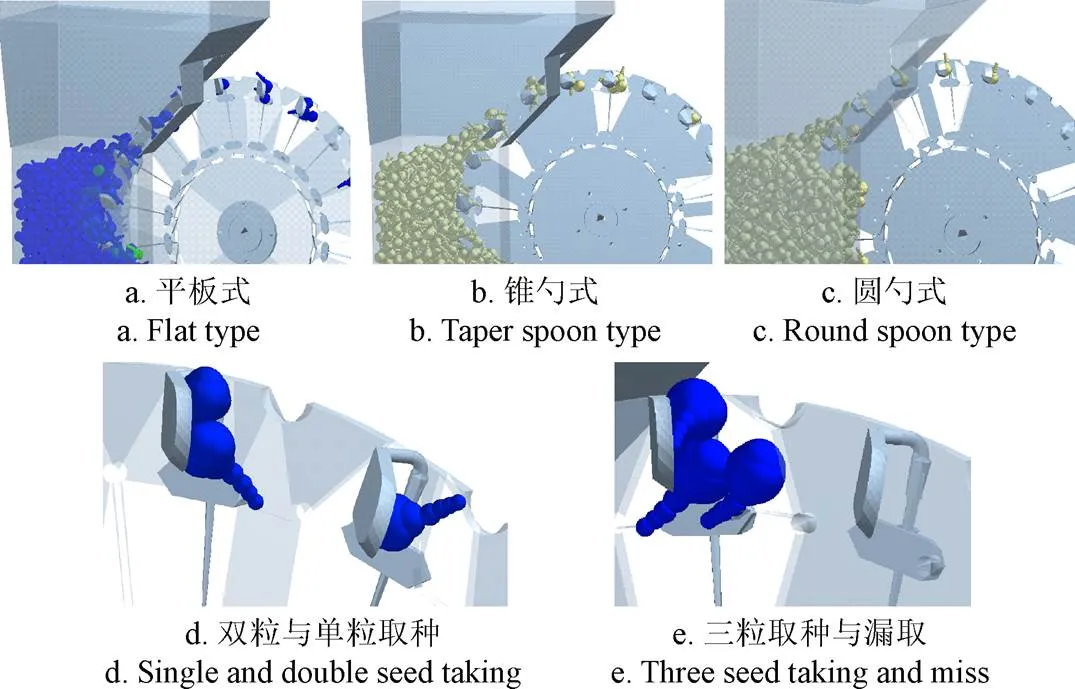
图11 取种过程仿真试验
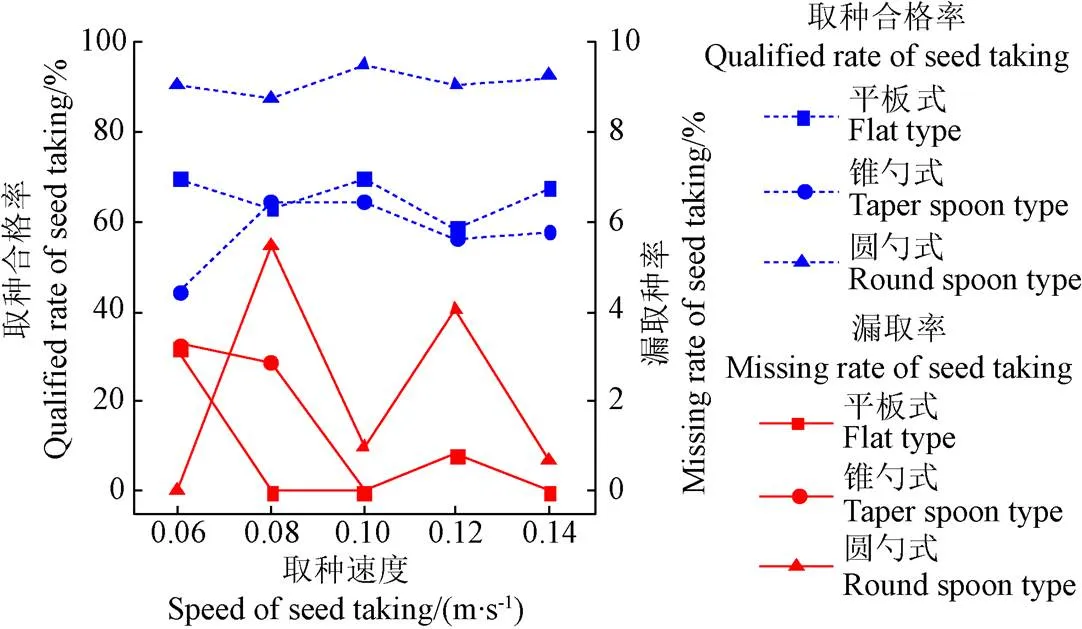
图12 排种器取种性能仿真试验结果
3 台架试验
3.1 材料与方法
勺夹式藠头排种器试验装置如图13所示,主要由安装板、种箱、取种系统、传动系统及驱动系统组成,由伺服电机提供动力。电机转速连续可调,最大转速1 500 r/min。种箱采用透明亚克力材质加工,方便观察取种过程。
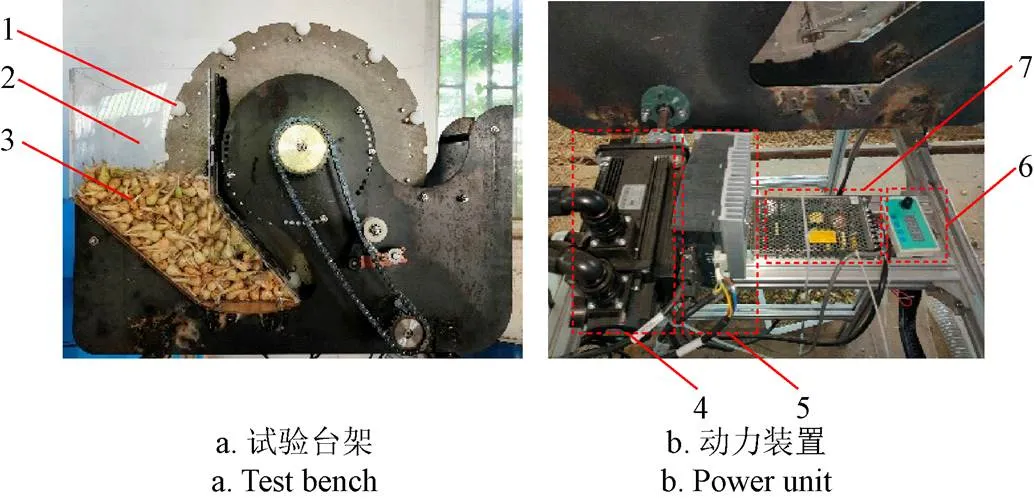
1.种勺 2.种箱 3.藠头种子 4.伺服电机 5.驱动器 6.控制器 7.24 V电源
试验参考GB/T 6973—2005《单粒(精密)播种机试验方法》,以取种合格率1和漏取率2作为评价指标,通过记录连续取种200次取种情况,计算取种合格率和漏取率。结合上文理论分析及预试验,选取5个因素(种勺直径s、种勺深度s、取种起始角s、种面高度与种箱高度之比s及取种速度s)进行试验。试验过程中,观察箱内种子运动情况并手动添加种子维持种面高度。
采用Plackett-Burman试验确定显著性影响因素,并进一步通过Box-Benhnken中心组合试验对显著性参数进行优化。
3.2 Plackett-Burman试验
应用Design-Expert 12软件进行Plackett-Burman试验设计,以取种合格率、漏取率为响应值,试验因素水平如表2所示,试验方案及结果如表3所示,对试验结果主效应间进行方差分析,如表4。由表4可知,种勺直径s对漏取率有极显著影响(<0.01),种面高度与种箱高度之比s对取种合格率和漏取率均有显著影响(<0.05)。综合考虑取种起始角s的影响,选取种勺直径s、取种起始角s、种面高度与种箱高度之比s作为影响因素进行优化试验。

表2 Plackett-Burman试验因素与水平
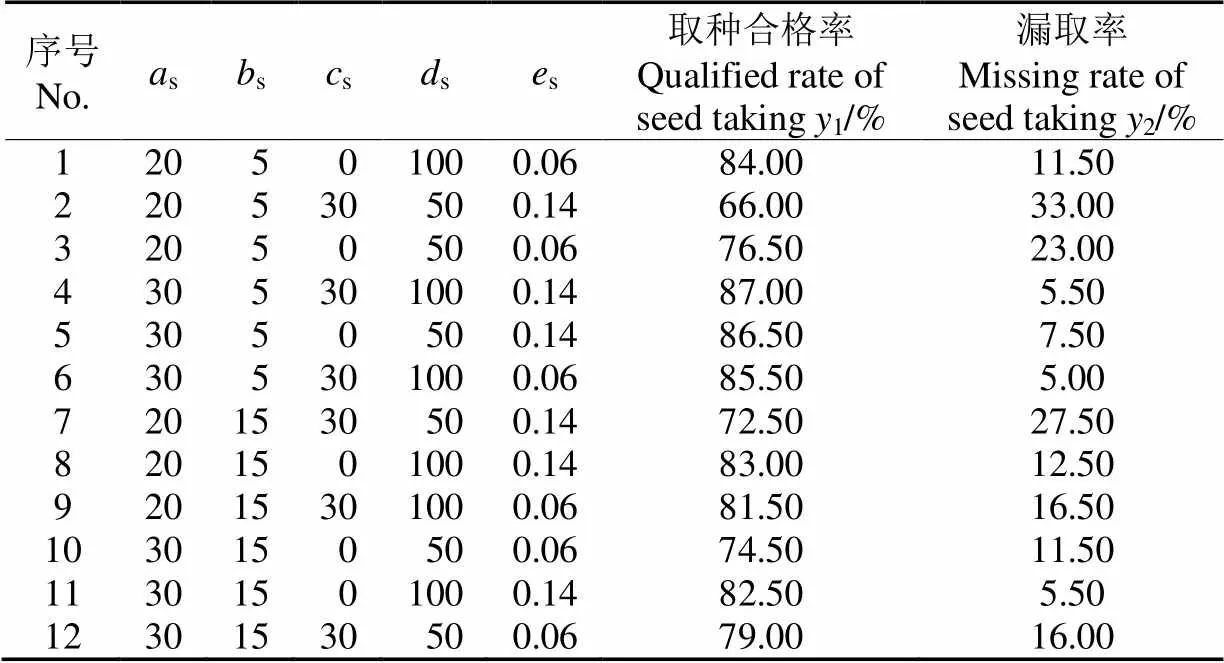
表3 Plackett-Burman试验方案及结果
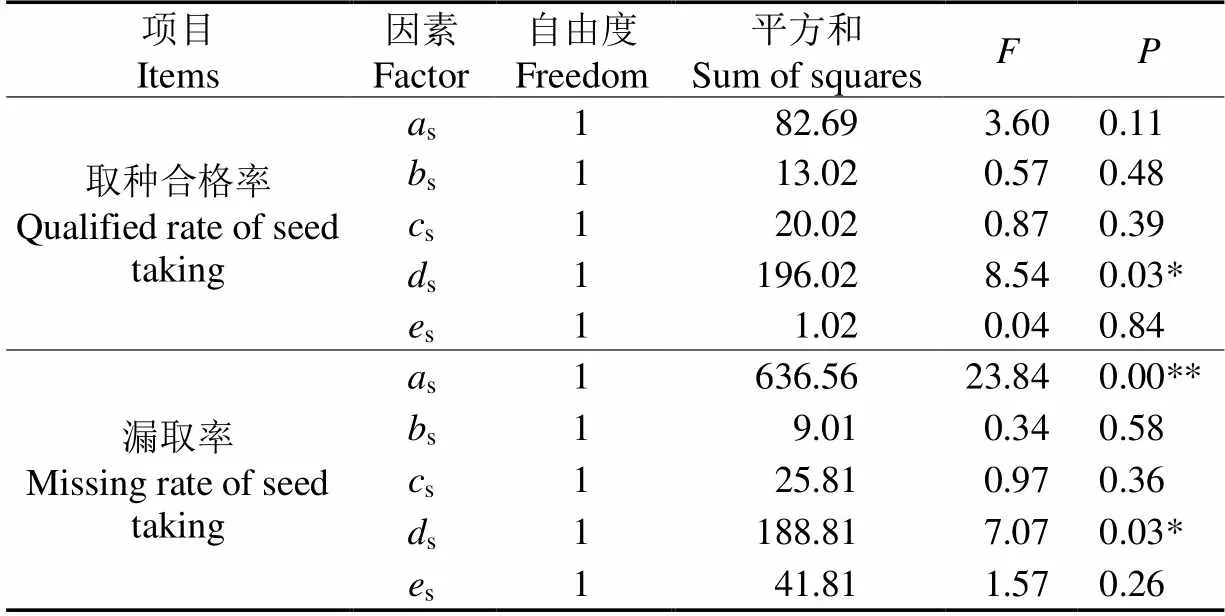
表4 方差分析
注:**表示影响极显著,<0.01;*表示影响显著,<0.05。下同。
Note: **indicates that the impact is extremely significant,<0.01; * indicates that the impact is significant,<0.05. The same below.
3.3 Box-Behnken 试验
为了获取排种器较优组合参数,基于上述试验结果开展Box-Behnken中心组合试验。选取种勺直径s、取种起始角s、种面高度与种箱高度之比s为影响因素,因素水平编码如表5。种勺深度s和取种速度s选取中间值10 mm和0.1 m/s,根据试验设计方案共开展17组试验,试验方案及结果如表6所示。

表5 因素水平编码
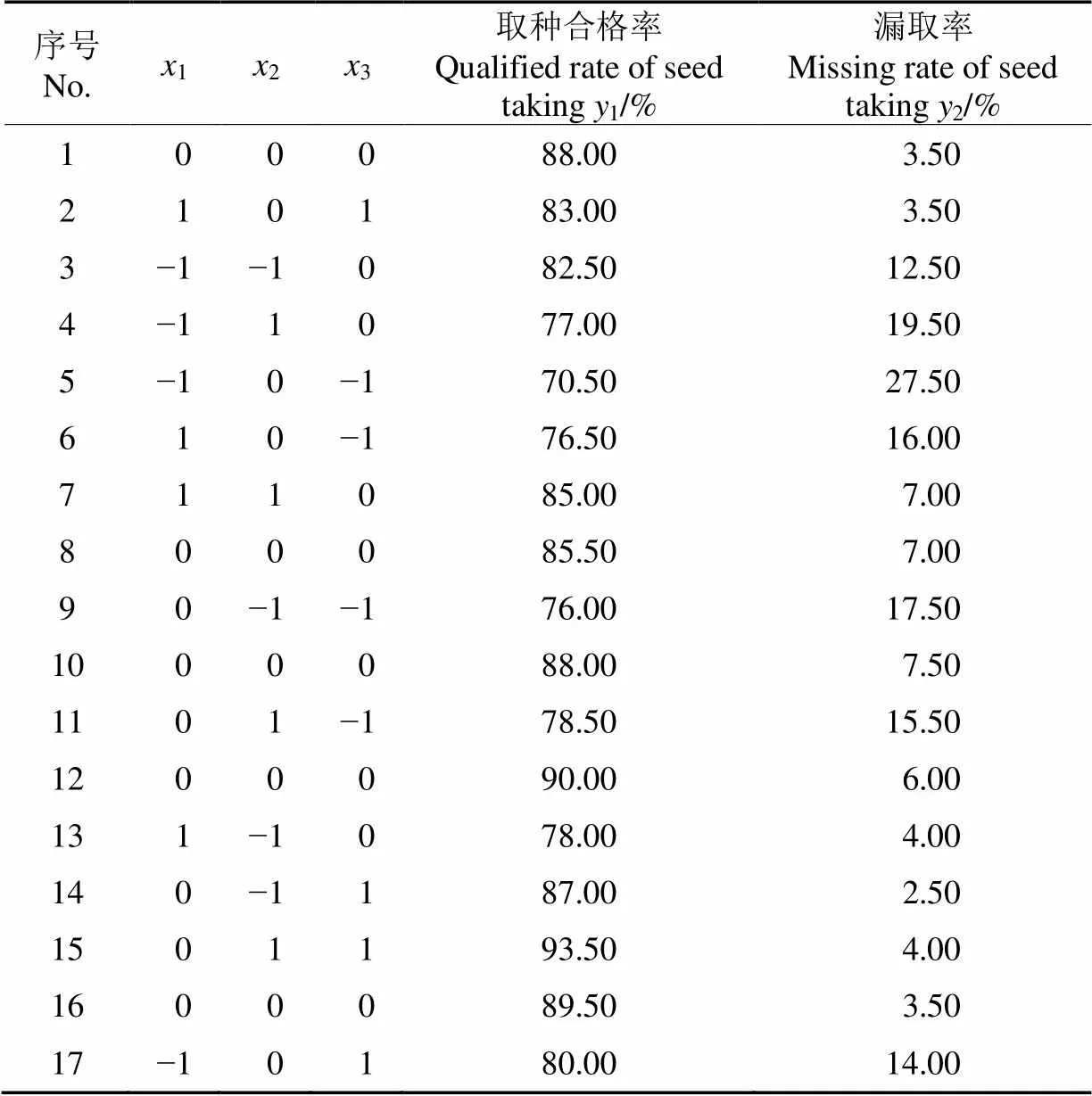
表6 Box-Behnken 试验方案及结果
注:1、2、3分别为s、s、s的水平值。
Note:1,2, and3are the level values ofs,s, ands.
为进一步分析各试验因素及其交互作用对试验指标的影响规律,采用Design-Expert 12对试验结果进行多元回归拟合,建立试验指标与各因素的回归模型,显著性检验结果如表7所示。
由表7可知,回归模型检验均极显著(<0.01),失拟检验均不显著,故回归模型与实际情况拟合良好。对于取种合格率回归方程,除1、2、13、23、22外,其余项均显著,且因素影响取种合格率的主次因素为:种面高度与种箱高度之比、种勺直径、取种起始角;对于漏取率回归方程,除212132322外,其余项均显著,且因素影响漏取率的主次因素为:种勺直径、种面高度与种箱高度之比、取种起始角。剔除回归模型中不显著项,得到试验指标与各因素之间的二次回归方程为:


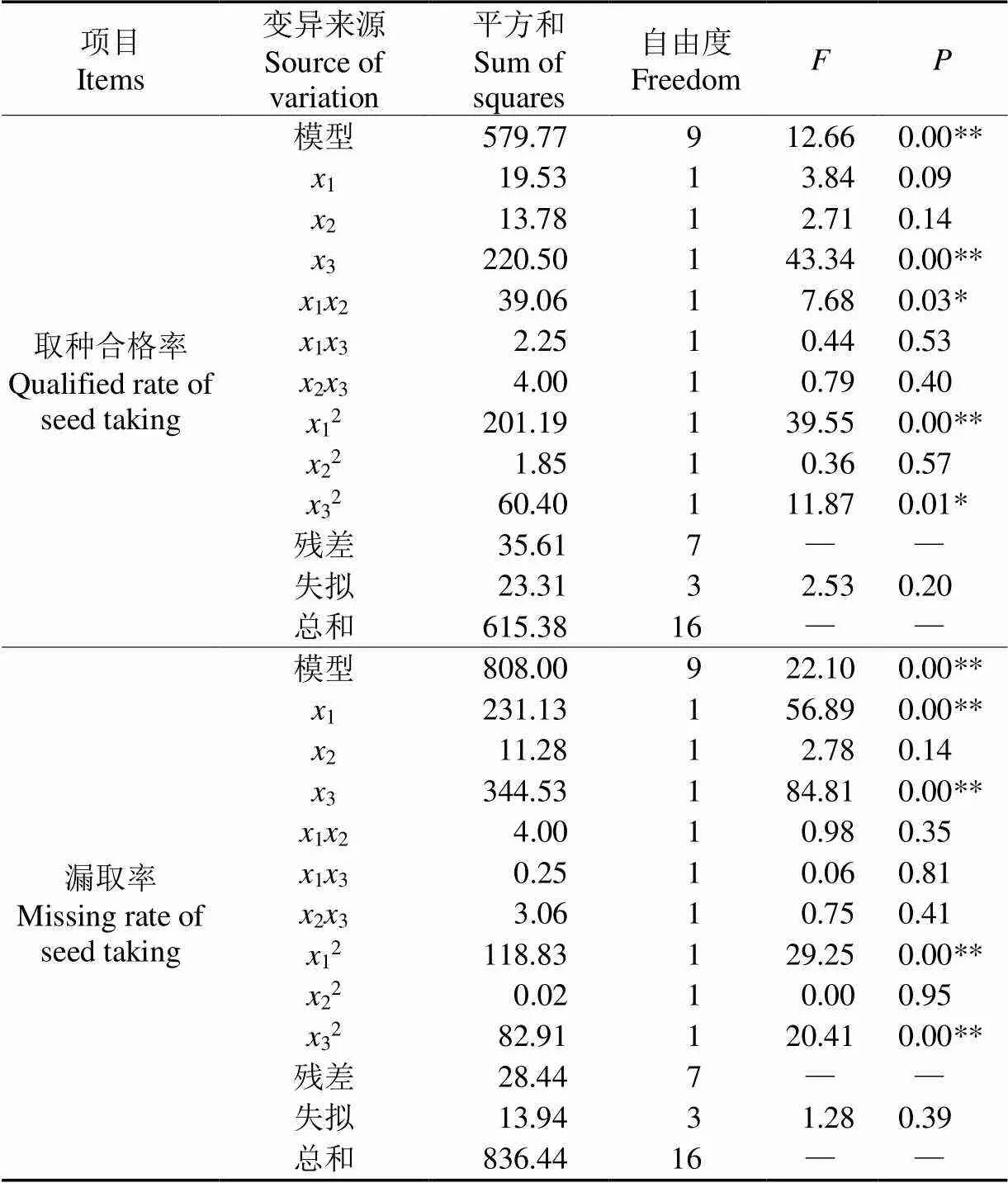
表7 Box-Behnken试验方差分析
为直观分析因素与试验指标之间的关系,利用Design-Expert 12绘制响应曲面图,其中种勺直径和取种起始角与取种合格率之间的响应曲面如图14所示。由图14可知,在取种速度为0.1 m/s、种勺深度为10 mm、种面高度与种箱高度之比为75%且取种起始角恒定的情况下,取种合格率随着种勺直径的增大先增加后减小;选取较小的种勺直径时,取种合格率随取种起始角的增大而减小;选取大于25 mm的较大种勺直径时,取种合格率随取种起始角的增大而增加。由等高曲线可知,种勺直径为22.5~30 mm,取种起始角为11°~30°时,取种合格率存在最大值。
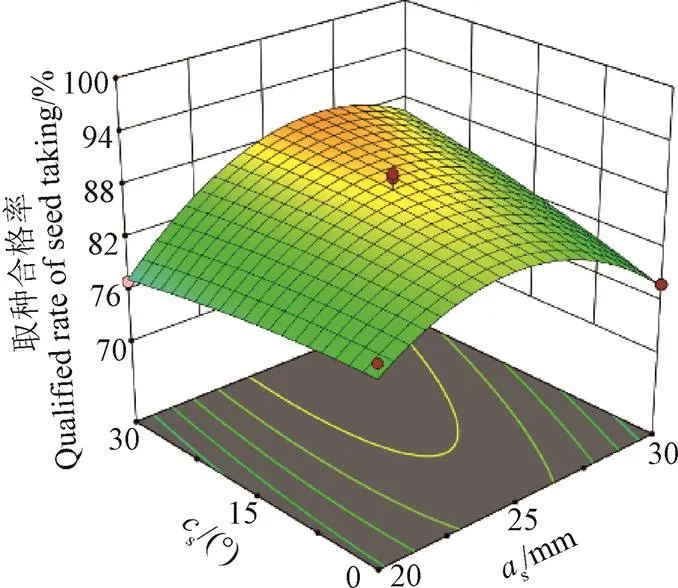
图14 种勺直径和取种起始角对取种合格率的影响
3.4 参数优化及试验验证
为寻找排种器性能最优状态下的各因素参数组合,以取种合格率1最高和漏取率2最低为目标函数,以种勺直径s、取种起始角s、种面高度与种箱高度之比s为约束条件,对所建立的二次回归模型优化求解,目标函数与约束条件为

运用Design-Expert 12优化求解模块得到种勺直径s=27 mm,取种起始角s=30°,种面高度与种箱高度之比s=92.5%时,排种器取种性能达到最优,取种合格率为91.89%,漏取率为3.14%。为验证优化参数的可靠性,进行3次重复试验,在取种速度为0.1 m/s时,得到平均取种合格率为91.17%,平均漏取率为6.17%。
4 田间试验
4.1 试验条件
田间试验于2022年4月在华中农业大学校内试验田进行。田间土壤平均含水率为17.56%,200 mm深度处平均土壤坚实度为11.4 kPa。
基于排种器仿真试验及优化设计,试制如图15a所示的排种器田间试验装置,该装置主要由手扶拖拉机、悬挂架、仿形机架、地轮、传动副、链轮、种箱、排种盘、取投种凸轮和勺夹机构等组成。排种单体前进动力由1WG5.2-80型微耕机提供,其柴油机标定功率5.88 kW,最大功率6.47 kW,地轮到排种器传动比为0.82∶1,试验时地轮平均滑移率为7.99%,理论穴距S为108 mm。试验选用湖北崇阳产大叶藠种,净度≥83.04%,平均含水率43.76%。
4.2 试验方法
试验依据《GB/T 6973-2005 单粒(精密)播种机试验方法》及藠头种植农艺要求,采用穴距衡量排种器性能,试验共进行3组,每组试验分5次行程,每次行程10 m,机具前进速度为0.1~0.2 m/s。每组试验结束后,选取每次行程中间6 m进行穴距测量,如图15b。数据按照0.1的间隔绘制频率分布直方图,得到穴距值S与理论穴距S的比值落入每个区段的频数。
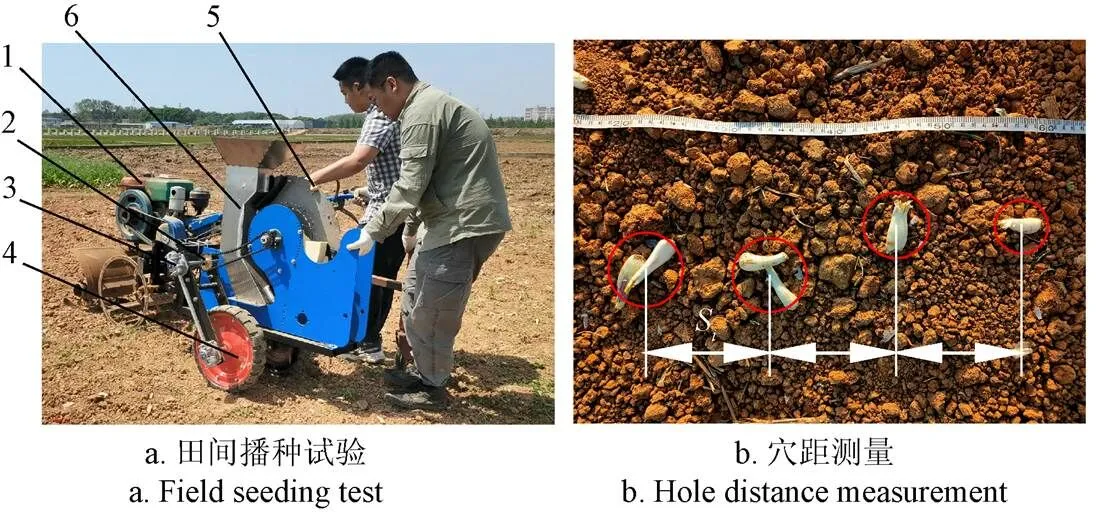
1.柴油机 2.驱动轴链轮 3.传动副 4.地轮 5.勺夹 6.排种盘链轮
1.Diesel engine 2.Sprocket of the drive shaft 3.Transmission unit 4.Ground wheel 5.Spoon clip 6.Sprocket of the seed metering disc
注:S为穴距,mm。
Note:Sis the hole distance, mm.
图15 田间试验
Fig.15 Field test
4.3 试验结果与分析
绘制频率分布直方图,如图16所示,纵坐标相对频率r为区段频数与该组试验测定种子数的比值,3组试验的穴距值多数集中分布在(0.5~1.5)S的区间内,相对频率分别为57.33%、61.29%和66.43%。经过计算,试验结果如表8所示,试验的平均播种合格率、重播率和漏播率分别为63.10%、12.76%和24.14%,播种穴距的平均标准差为0.28 mm。
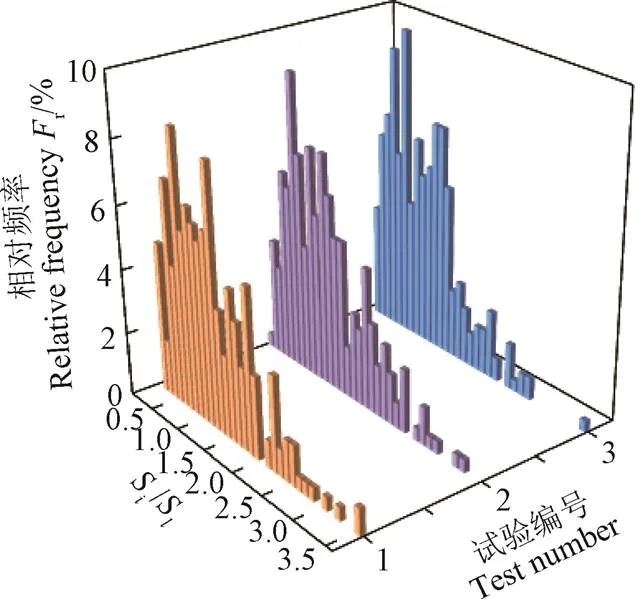
注:Sl为理论穴距,mm。
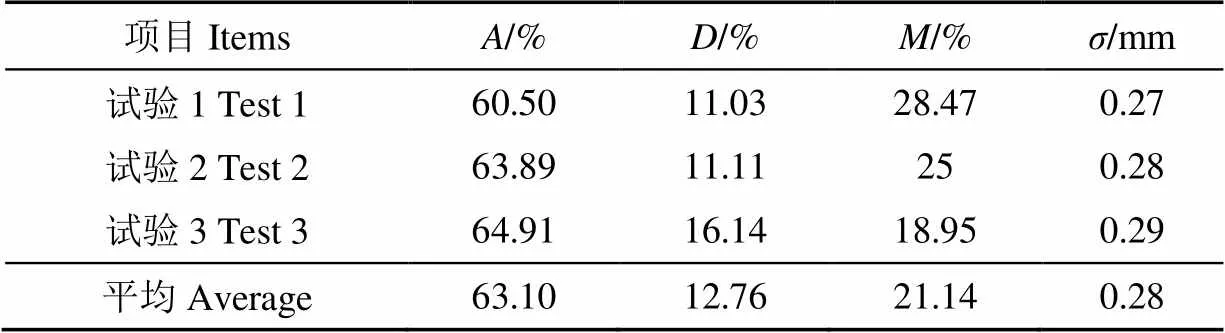
表8 田间试验结果
注:为播种合格率,%;为重播率,%;为漏播率,%;为穴距标准差,mm。
Note:is seeding qualified rate, %;is re-seeding rate, %;is miss-seeding rate, %;is standard deviation of the hole distance, mm.
观察田间试验过程可知,排种器能够在田间环境中完成取种、携种及投种全过程,取种携种效果与台架试验相近(图17a),投种过程(图17b)也出现了单粒及双粒投种。根据《NY/T 503-2015单粒(精密)播种机作业质量》要求,粒(穴)距≤100 mm时,播种合格率、重播率、漏播率分别应满足≥60.0%、≤30.0%、≤25.0%,排种器各项性能指标基本符合作业要求,但仍有提升改进空间。
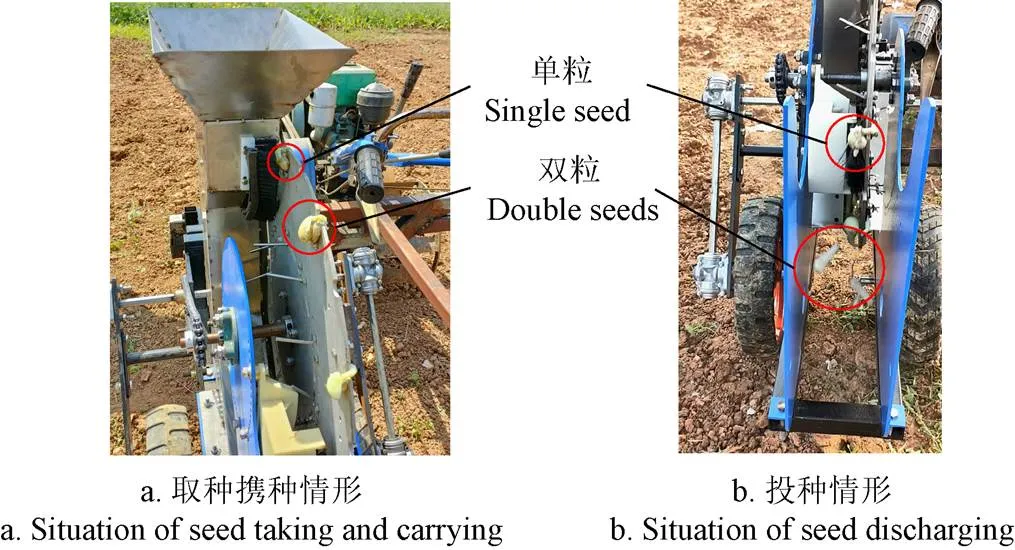
图17 排种器田间取种、携种和投种情形
5 讨 论
1)大叶藠种形状不规则、尺寸变化大,对精量取种造成困难,实际应用中应对藠种进行分级、提高种子尺寸一致性来提升播种质量。其他与藠头种子形状相近的较小块粒状种子,如大蒜、马铃薯等,外形与种勺有一定的贴合度,也可应用于本文设计的排种器,后续需对排种器的通用性开展试验研究。
2)试验中种面高度与种箱高度之比作为影响因素反映了箱内种子的多少对于排种器性能的影响规律,由于藠头种子流动性较差,箱内种子过多时勺夹容易堆积托种;种子过少则易在箱内形成盲区,藠种不能及时填充从而造成漏取。考虑箱内藠种在勺夹搅动下会形成一定的空隙率,合适的空隙率有利于箱内藠种的流动,故后续需进一步探究供种方式及箱内种子空隙率对于排种器性能的影响[27]。
3)投种高度通常也是影响播种质量的重要因素[28],田间试验过程中藠头种子落地后在土壤表面发生了弹跳,影响了排种性能,后续需开展藠头种子与土壤的碰撞研究,探索合适的投种高度和投种方式以减少弹跳,进一步提高播种准确性。
4)考虑到田间试验作业环境复杂导致机具抖动、机具前进速度变化大,后续还需继续开展机具前进速度、振动等因素对排种器工作性能的影响规律研究。
6 结 论
1)设计了一种由凸轮控制开合而实现取投种的勺夹式藠头排种器,对取种、携种过程中的藠头种子进行了受力分析,阐述了勺夹式排种器取种原理。针对排种器勺夹进行了离散元仿真试验分析,结果表明圆勺式取种合格率最高,为优选结构。
2)建立了以取种合格率和漏取率为目标的多元回归模型,对种勺直径s、取种起始角s、种面高度与种箱高度之比s进行了参数优化。最优参数组合为:种勺直径s=27 mm,取种起始角s=30°,种面高度与种箱高度之比s=92.5%,此时,平均取种合格率为91.17%,漏取率为6.17%。
3)田间排种试验结果表明,机具在0.1~0.2 m/s的前进速度下,排种器平均播种合格率、重播率和漏播率分别为63.10%、12.76%和24.14%。平均穴距标准差为0.28 mm。排种器各项性能指标基本符合作业要求,投种过程及排种工作稳定性仍有较大优化提升空间。
[1] 焦阳,尹海波,董双双. 藠头的本草考证[J]. 辽宁中医药大学学报,2010,12(7):186-188.
JIAO Yang, YIN Haibo, DONG Shuangshuang. Materia medica textual research ofG. Don[J]. Journal of Liaoning University of Traditional Chinese Medicine,2010,12(7): 186-188. (in Chinese with English abstract)
[2] 周向荣,夏延斌,周跃斌,等. 藠头的主要功能成分及其作用的研究进展[J]. 食品与机械,2006,22(3):73-75.
ZHOU Xiangrong, XIA Yanbin, ZHOU Yuebin, et al. Investigation progress on main functional components and effects of Allium Chinense G. Don[J]. Food & machinery, 2006, 22(3): 73-75. (in Chinese with English abstract)
[3] 陈学军,程和生,万新建,等. 绿色食品藠头栽培技术规程[J]. 江西农业学报,2009,21(8):97-98.
CHEN Xuejun, CHENG Hesheng, WAN Xinjia, et al. Cultivation technology regulation of green food crop Allium Chinensis[J]. Acta Agriculturae Jiangxi, 2009, 21(8): 97-98. (in Chinese with English abstract)
[4] 陆裕华,陈晟,陆陈后,等. 南方高山地区藠头两高一优栽培技术[J]. 长江蔬菜,2020(19):4-6.
LU Yuhua, CHEN Sheng, LU Chenhou, et al. High-yield, good-quality and high-efficiency cultivation techniques forof Southern Alpine Region[J]. Journal of Changjiang Vegetables, 2020(19): 4-6. (in Chinese with English abstract)
[5] 杨艳丽,辜松,李恺,等.大粒种子定向精量播种装置参数优化试验[J]. 农业工程学报,2013,29(13):15-22.
YANG Yanli, GU Song, LI Kai, et al. Parameters optimization of directing precision seeder for large cucurbitaceous seeds[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(13): 15-22. (in Chinese with English abstract)
[6] 胡梦杰,夏俊芳,郑侃,等. 内充气力式棉花高速精量排种器设计与试验[J]. 农业机械学报,2021,52(8):73-85.
HU Mengjie, XIA Junfang, ZHENG Kan, et al. Design and experiment of inside-filling pneumatic high speed precision seed-metering device for cotton[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(8): 73-85. (in Chinese with English abstract)
[7] 崔涛,韩丹丹,殷小伟,等. 内充气吹式玉米精量排种器设计与试验[J]. 农业工程学报,2017,33(1):8-16.
CUI Tao, HAN Dandan, YIN Xiaowei, et al. Design and experiment of inside-filling air-blowing maize precision seed meteringdevice[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(1): 8-16. (in Chinese with English abstract)
[8] 廖庆喜,雷小龙,廖宜涛,等. 油菜精量播种技术研究进展[J]. 农业机械学报,2017,48(9):1-16.
LIAO Qingxi, LEI Xiaolong, LIAO Yitao, et al. Research progress of precision seeding for rapeseed[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(9): 1-16. (in Chinese with English abstract)
[9] 陈美舟,刁培松,张银平,等. 大豆窄行密植播种机单盘双行气吸式排种器设计[J]. 农业工程学报,2018,34(21):8-16.
CHEN Meizhou, DIAO Peisong, ZHANG Yinping, et al. Design of pneumatic seed-metering device with single seed-metering plate for double-row in soybean narrow-row-dense-planting seeder[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(21): 8-16. (in Chinese with English abstract)
[10] KARAYEL D. Performance of a modified precision vacuum seeder for no-till sowing of maize and soybean[J]. Soil and Tillage Research, 2009, 104(1): 121-125.
[11] WOO S M, UYEH D D, SAGONG M S, et al. Development of seeder for mixed planting of corn and soybeans[J]. International Journal of Agricultural and Biological Engineering, 2017, 10(3): 95-101.
[12] BUITENWERF H, HOOGMOED W B, LERINK P, et al. Assessment of the behavior of potatoes in a cup-belt planter[J]. Biosystems Engineering, 2006, 95(1): 35-41.
[13] 吕金庆,杨颖,李紫辉,等. 舀勺式马铃薯播种机排种器的设计与试验[J]. 农业工程学报,2016,32(16):17-25.
LYU Jinqing, YANG Ying, LI Zihui, et al. Design and experiment of cup-belt type potato seed-metering device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(16): 17-25. (in Chinese with English abstract)
[14] 牛康,苑严伟,罗敏,等. 双层种箱式马铃薯排种装置设计与试验[J]. 农业工程学报,2016,32(20):32-39.
NIU Kang, YUAN Yanwei, LUO Min, et al. Design and experiment of potato metering device with double-deck seed tank[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(20): 32-39. (in Chinese with English abstract)
[15] 吕金庆,衣淑娟,陶桂香,等. 马铃薯气力精量播种机设计与试验[J]. 农业工程学报,2018,34(10):16-24.
LYU Jinqing, YI Shujuan, TAO Guixiang, et al. Design and experiment of precision air-suction type planter for potato[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(10): 16-24. (in Chinese with English abstract)
[16] 崔荣江,荐世春,杨继鲁,等. 勺链式大蒜取种器的优化设计与试验[J]. 农机化研究,2017,39(2):9-102.
CUI Rongjiang, JIAN Shishun, YANG Jilu, et al. Optimization design and test of take garlic spoon[J]. Journal of Agricultural Mechanization Research, 2017, 39(2): 99-102. (in Chinese with English abstract)
[17] 侯加林,王后新,牛子孺,等. 大蒜取种装置取种清种性能离散元模拟与试验[J]. 农业工程学报,2019,35(24):48-57.
HOU Jialin, WANG Houxin, NIU Ziru, et al. Discrete element simulation and experiment of picking and clearing performance of garlic seed-picking device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(24): 48-57. (in Chinese with English abstract)
[18] 耿爱军,栗晓宇,侯加林,等. 自动定向大蒜播种机的设计与试验[J]. 农业工程学报,2018,34(11):17-25.
GENG Aijun, LI Xiaoyu, HOU Jialin, et al. Design and experiment of automatic directing garlic planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(11): 17-25. (in Chinese with English abstract)
[19] 康启新,张国忠,郑侃,等. 施力方向与加载速率对藠头种子力学特性的影响[J]. 华中农业大学学报,2021,40(4):231-238.
KANG Qixin,ZHANG Guozhong, ZHENG Kan, et al. Effects of force direction and loading speed on seed mechanical properties of Allium chinense[J]. Journal of Huazhong Agricultural University, 2021, 40(4): 231-238. (in Chinese with English abstract)
[20] 侯占峰,戴念祖,陈智,等. 冰草种子物性参数测定与离散元仿真参数标定[J]. 农业工程学报,2020,36(24):46-54.
HOU Zhanfeng, DAI nianzu, CHEN Zhi, et al. Measurement and calibration of physical property parameters for Agropyron seeds in a discrete element simulation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(24): 46-54. (in Chinese with English abstract)
[21] 张荣芳,焦伟,周纪磊,等. 不同填充颗粒半径水稻种子离散元模型参数标定[J]. 农业机械学报,2020,51(S1):227-235.
ZHANG Rongfang, JIAO Wei, ZHOU Jilei, et al. Parameter calibration and experiment of rice seeds discrete element model with different filling particle radius[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(S1): 227-235. (in Chinese with English abstract)
[22] 焦俊,张国忠,杜俊,等. 莲藕主藕体弯曲破坏离散元仿真分析[J]. 华中农业大学学报,2021,40(5):217-225.
JIAO Jun, ZHANG Guozhong, DU Jun, et al. Discrete element simulation of bending failure of main lotus root[J]. Journal of Huazhong Agricultural University, 2021, 40(5): 217-225.
[23] 石林榕,马周泰,赵武云,等. 胡麻籽粒离散元仿真参数标定与排种试验验证[J]. 农业工程学报,2019,35(20):25-33.
SHI Linrong, MA Zhoutai, ZHAO Wuyun, et al. Calibration of simulation parameters of flaxed seeds using discrete element method and verification of seed-metering test[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(20): 25-33. (in Chinese with English abstract)
[24] 文恩杨,李玉华,牛子孺,等. 蒜种颗粒离散元模型参数标定[J]. 农机化研究,2021,43(5):160-167.
WEN Enyang, LI Yuhua, NIU Ziru, et al. Parameters calibration of discrete element model for garlic particles[J]. Journal of Agricultural Mechanization Research, 2021, 43(5): 160-167. (in Chinese with English abstract)
[25] HORABIK J, MOLENDA M. Parameters and contact models for DEM simulations of agricultural granular materials: A review[J]. Biosystems Engineering, 2016, 147(7): 206-225.
[26] OINONEN A, MARQUIS G. A constitutive model for interface problems with frictional contact and cohesion[J]. European Journal of Mechanics A-Solids, 2015, 49(1): 205-213.
[27] 鹿芳媛. 两级双振动式水稻精密播种器机理分析与试验研究[D]. 广州:华南农业大学,2018.
LU Fangyuan. Working Mechanism Analysis and Experimental Research on Two-Stage Double Vibration Rice Precision Seeder[D]. Guangzhou: South China Agricultural University, 2018. (in Chinese with English abstract)
[28] 陈学庚,钟陆明. 气吸式排种器带式导种装置的设计与试验[J]. 农业工程学报,2012,28(22):8-15.
CHEN Xuegeng, ZHONG Luming. Design and test on belt-type seed delivery of air-suction metering device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(22): 8-15. (in Chinese with English abstract)
Design and experiment of the spoon clip type seed metering device for
KANG Qixin1, ZHANG Guozhong1,2※, ZHENG kan1,2, LIU Haopeng1,2, TANG Nanrui1, LIU Wanru1, JI Chao1
(1.430070,; 2.430070,)
, as a characteristic vegetable, is exported to Southeast Asian countries such as Japan and South Korea with remarkable economic benefits. Aimed at the problems ofplanting, main including high labor intensity and artificial planting process cost, a spoon clip seed metering device forwas designed. It consists of a seed metering disc, spoon, seed taking and discharging cam, seed box, mounting plate, and other components. The working principle of the spoon clip seed metering device for, and the mechanism of seed taking, seed carrying, and seed discharging were expounded by analyzing the stress state and movement state ofseeds in the working process of seed metering device. The seed taking process of the seed metering device was simulated using discrete element simulation software to optimize the spoon for different structures. The Plackett-Burman test method was used to select the significant factors of spoon diameter, spoon depth, start angle of seed taking, ratio of seed surface height to seed box height, and speed of seed taking. Qualified rate of seed taking and missing rate of seed taking were used as test indexes. Orthogonal regression tests were carried out with spoon diameter, start angle of seed taking, and ratio of seed surface height to seed box height as experimental factors. Regression models of qualified rate of seed taking and missing rate of seed taking were established, and parameters were optimized. Field test were conducted to examine the field seeding performance of the seed metering device forbased on obtaining optimal parameters. Simulation results show that the type of spoon has a high significance on the qualified rate of seed taking (<0.01). Qualified rate of seed taking of the round spoon is more excellent than the other two spoons at different speeds, with an average value of 91.14%, and the round spoon is selected as the preferred structure through comprehensive analysis. According to the results of the Plackett-Burman test, diameter of spoon has a highly significant effect on the missing rate of seed taking (<0.01), and ratio of seed surface height to seed box height has a significant effect on both the qualified rate of seed taking and missing rate of seed taking (<0.05). The analysis of the effects of the test factors and their interactions on the test indicators in the Box-Behnken test shows that the test regression model is highly significant (<0.01). The interaction of spoon diameter and start angle of seed taking have a significant effect on the qualified rate of seed taking. Under the condition that other factors are determined, the qualified rate of seed taking increases with the increase of pickup diameter and then decreases. The qualified rate of seed taking decreases with the increase of the start angle of seed taking for smaller spoon diameters and increases with the increase of the start angle of seed taking for spoon diameters larger than 25 mm. The optimal parameters are as follows: spoon diameter is 27 mm, start angle of seed taking is 30°, and ratio of seed surface height to seed box height is 92.5%. Under the optimal parameter combination, the filling qualified rate and missing rate of seed taking were obtained, they were 91.17% and 6.17% respectively, which were consistent with the predicted results of the model. Observations of the field test process indicate that the seed metering device can complete the whole process of seed taking, seed carrying, and seed discharging in the field environment. The results of the field seeding test show that the average seeding qualified rate is 63.10%, and the average multiples rate and seeding missing rate are 12.76% and 24.14%, respectively, at the forward speed of 0.1-0.2 m/s. According to the operating quality for single seed metering device can satisfy the field operation. However, stability and efficiency can still be further optimized and improved. The research can provide a reference for the research and design of planting machinery for.
discrete element; response surface; seed metering device; spoon clip type;
10.11975/j.issn.1002-6819.202212020
S223.2
A
1002-6819(2023)-05-0015-11
康启新,张国忠,郑侃,等. 勺夹式藠头排种器设计与试验[J]. 农业工程学报,2023,39(5):15-25.doi:10.11975/j.issn.1002-6819.202212020 http://www.tcsae.org
KANG Qixin, ZHANG Guozhong, ZHENG Kan, et al. Design and experiment of the spoon clip type seed metering device for[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2023, 39(5): 15-25. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.202212020 http://www.tcsae.org
2022-12-20
2023-02-07
国家特色蔬菜产业技术体系专项资助项目(CARS-24-D-02)
康启新,博士生,研究方向为现代农业装备设计与测控。Email:kangqixin@webmail.hzau.edu.cn
张国忠,教授,博士生导师,研究方向为现代农业装备设计与测控。Email:zhanggz@mail.hzau.edu
猜你喜欢
农业机械学报(2022年9期)2022-11-08
农机科技推广(2022年8期)2022-09-16
新疆农机化(2022年1期)2022-03-02
制造技术与机床(2019年8期)2019-09-03
时代农机(2019年5期)2019-02-11
农业工程学报(2018年24期)2019-01-14
精密制造与自动化(2018年1期)2018-04-12
制造技术与机床(2017年5期)2018-01-19
农业工程学报(2017年17期)2017-11-01
山西大同大学学报(自然科学版)(2016年2期)2016-12-12