
基于能量管理策略的太阳能无人机航迹跟踪控制
2023-05-12 12:13郭林刘飞李佳钰何佩李清东王继维郭阳明
西北工业大学学报 2023年2期
郭林, 刘飞, 李佳钰, 何佩, 李清东, 王继维, 郭阳明
(1.西北工业大学计算机学院, 陕西 西安 710072; 2.中国航天空气动力技术研究院, 北京 100074;3.北京航空航天大学自动化科学与电气工程学院, 北京 100191;4.西北工业大学伦敦玛丽女王大学工程学院, 陕西 西安 710072)
太阳能无人机作为一种使用绿色能源的飞行器,随着科技进步和可持续发展理念的深入人心,正越来越受到研究者的重视。同时,太阳能无人机具有高空长航时作业能力,连续作业时间可以达到数月,这是其他类型无人机无可比拟的巨大优势,因此,在通信中继、农业、环境监测以及军事侦查等领域[1-2]有着广阔的应用需求。
太阳能无人机的航时问题一直是各国专家关注焦点,理论上太阳能无人机可以长时滞空飞行,但是由于任务载荷的限制,极大地影响了太阳能无人机的推广应用。为提高太阳能无人机的性能,目前的研究方向包括结构[3-4]、控制[5-6]、能源[7-8]、轨迹[9]等方面,太阳能无人机系统模型的精确度、储能电池状态的准确性、飞行策略的可行性都对太阳能无人机能量获取效率以及飞行效率有着巨大影响。
针对太阳能无人机飞行策略规划的研究,文献[10]重点讨论了无储能的太阳能无人机的可行起飞时间和地点,根据起飞时间和地点确定太阳能无人机可以达到的最大高度。文献[11-12]提出了利用重力储能的思想,即在光照充足的情况下,在维持太阳能无人机日常飞行需要和为蓄电池充电之外,将一部分太阳能转换为无人机的重力势能;在夜间无光照情况下,通过无动力滑翔等方式将这一部分重力势能释放。与恒定高度持续巡航相比,变高巡航策略下太阳能无人机所需的蓄电池供电时长更短,所需机翼面积也更小,目前众多太阳能无人机都采取了这种巡航策略。Sachs等[13]开展的关于太阳能无人机最小储能飞行策略的研究表明,无人机通过日照情况下爬升储存重力势能和无光照情况下无动力滑翔,理论上可以实现无电池持续巡航飞行。
对于太阳能无人机的航迹优化问题,文献[14-15]考虑了太阳能无人机给定起始位置和终止位置情况下的路径规划问题,建立了太阳能无人机运动模型、太阳辐射模型,讨论了能量消耗和无人机横侧向姿态的关系,以巡航结束时刻的剩余电能最大为优化目标,进行了水平定高盘旋情况下的太阳能无人机轨迹优化设计及仿真,表明经过优化的水平定高飞行轨迹明显优于水平直线飞行轨迹。文献[16-17]对在三维圆柱面内飞行的太阳能无人机轨迹进行了优化设计。文献[18]基于单位四元数法进行太阳能无人机轨迹优化。文献[19]研究了天气变化对低空飞行太阳能无人机轨迹规划的影响。文献[20]从能量建模、续航评估和能量管理策略3个方面对跨时空任务背景下太阳能无人机任务规划技术进行了研究,提出根据所建立的能量模型评估该区域内不同时间、地点、飞行高度情况下太阳能无人机的续航性能,为后续设计相应的能量管理策略奠定基础。文献[21]则将太阳能无人机飞行过程划分为起飞、平飞和下滑三段分别进行优化分析,并将结果与直接优化结果进行对比分析。
太阳能无人机在实际任务中,很多情况下轨迹是人为控制或给定的,离线的轨迹优化方法并不适用也不满足实时性要求。为此,设计了太阳能无人机能量管理策略,确定能量获取、存储与消耗的分配机制,通过重力势能储存多余太阳能,进行高度调整。同时,横侧向给定太阳能无人机航迹在地面的投影,根据太阳能无人机质点动力学方程设计控制器,实现了航迹跟踪。
1 太阳能无人机航迹跟踪问题建模
1.1 问题描述
太阳能无人机通过机翼上铺设的太阳能电池板获取太阳能,为机上电子设备供电并提供飞行动力。目前太阳能无人机的设计水平以及太阳能电池、蓄电池、电机等重要部件的性能水平已能够使太阳能无人机实现昼夜飞行。但是,为维持太阳能无人机夜间飞行能力,需综合设计蓄电池储能与重力势能储能2种方式,来满足太阳能无人机的滞空飞行需求与负载功率需求。因此,设计太阳能无人机的能量管理策略,规划能量的储存与利用方式,是太阳能无人机在整个飞行周期内能正常工作的必要途径。
太阳能无人机的一个重要应用场景是通信与环境监测。该应用要求在一个区域内,不断巡视地面目标或为其提供通信中继服务。因此,航迹跟踪控制是太阳能无人机应用中的一个重要问题。不同于通常的航迹跟踪,该场景下的航迹是地面投影的二维航迹。此外,为保证不影响正常运营的民机航线以及服务范围,太阳能无人机有最低飞行高度要求。太阳能无人机航迹跟踪问题如图1所示。
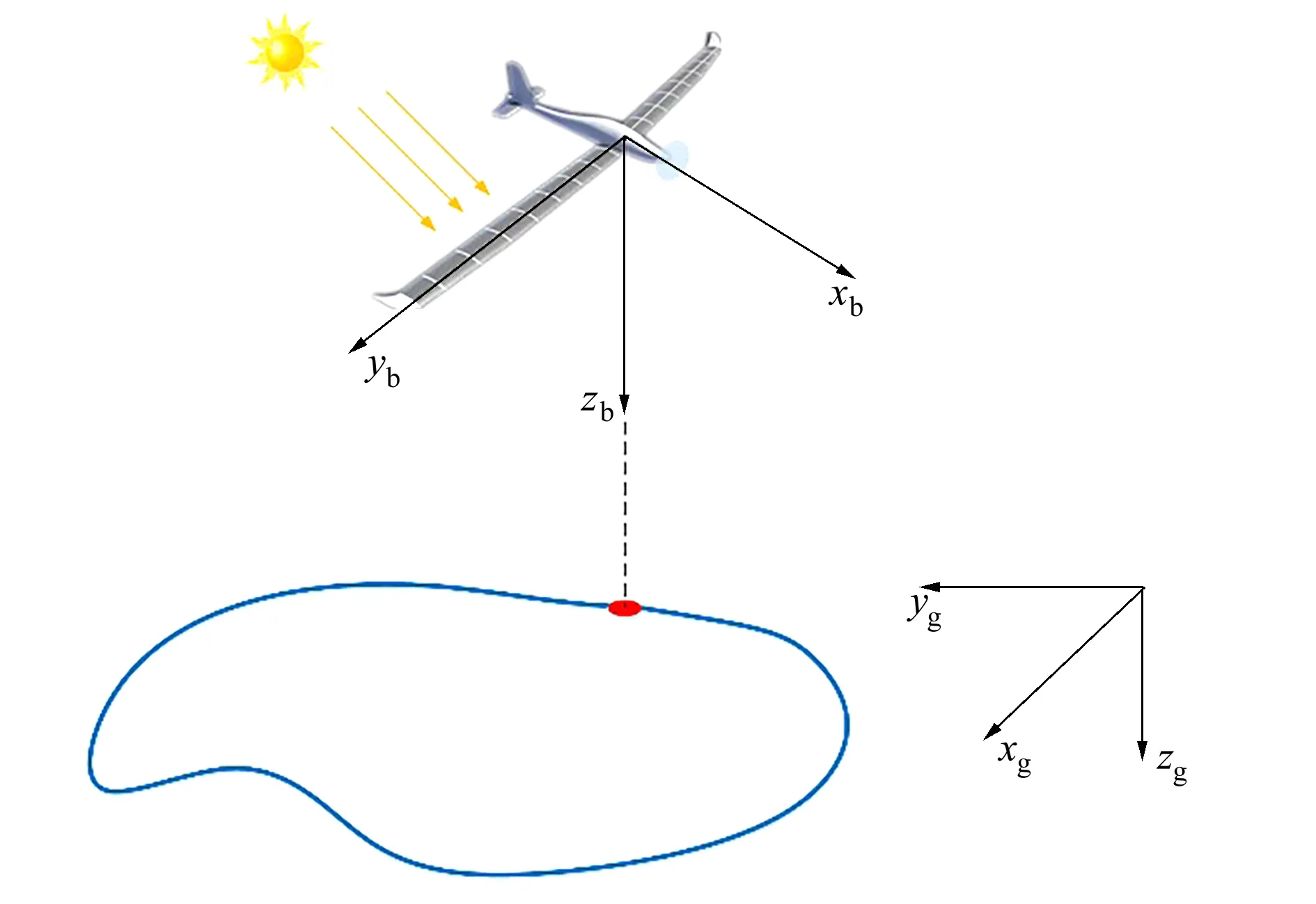
图1 太阳能无人机航迹跟踪问题示意图
考虑到太阳能无人机长时飞行的核心问题之一是太阳能源的收集、储存与使用,建立太阳能无人机航迹跟踪问题所涉及到的数学模型包括太阳能无人机三维质点动力学方程、功率消耗模型、太阳辐射能量计算模型、蓄电池模型。
1.2 三维质点动力学模型
对于静风飞行的太阳能无人机,其三维质点运动学方程可写为
(1)
式中:x,y,z表示地面参考坐标系下的三维坐标;ψ为航迹方位角;γ为航迹倾斜角;V为速度;T为推力;D为阻力;nh,nv分别为横向过载与法向过载。由于太阳能无人机飞行时攻角为小角度,上述模型假设推力和阻力方向与速度方向平行,升力方向则与速度方向垂直。
nh,nv的计算式为
(2)
式中:L为太阳能无人机升力;φ为滚转角;m为质量。
太阳能无人机的升力与阻力可由空气动力学方程计算得到
(3)
式中:ρ为空气密度;Sw为机翼面积;CL为升力系数;CD为阻力系数。
升力系数与阻力系数与太阳能无人机翼型设计有关并受攻角、马赫数影响。太阳能无人机飞行速度较小,升力系数与阻力系数对低马赫数不敏感。因此,本文将攻角视为升力系数与阻力系数的唯一决定变量。
1.3 功率消耗模型
太阳能无人机的功率消耗主要供给推进系统,由于机上其他系统负载所产生的消耗较小,本文中不予考虑。推进系统由电机与螺旋桨组成,其提取的电功率表示为
(4)
式中:ηprop为整个推进系统的综合能量转换效率。
螺旋桨的推进效率与马赫数有关,太阳能无人机飞行马赫数较小且变化不大,同时在对本文分析影响不大的情况下,可视ηprop为常数。由此,太阳能无人机的推进功率消耗与推力、速度关系由(4)式确定。
1.4 太阳辐射能量计算模型
长航时太阳能无人机设计飞行高度可达12 000~30 000 m,此高度下的大气较为稀薄,也没有对流层的强烈扰动,温度、湿度、大气反射、大气散射等因素对太阳能无人机接收到的太阳能量的影响可以忽略不计。同时,由于计算复杂度的原因,不考虑太阳能电池板在机翼上安装时机翼翼型曲率的影响,认为电池板为固定在机体坐标系中的平板。此时,太阳光线相对于太阳能电池板的入射角度是主要影响因素。
太阳能电池板的输出功率计算
Psc=ηMPPTηscPsdSsccosθ
(5)
式中:ηMPPT为MPPT最大功率跟踪效率;ηsc为太阳能电池板能量转化效率;Psd为太阳常数,表示地球-太阳平均距离上垂直于太阳光方向的单位面积接收到的太阳辐射能;Ssc为太阳能电池板面积;θ为太阳光线相对太阳能电池板的入射角。
由(5)式可知,太阳能电池板输出功率主要取决于入射角θ。入射角一方面与太阳高度角和方位角有关,另一方面与太阳能无人机姿态有关,通过地面坐标系与机体坐标系坐标转换方法可以获得太阳光线在机体坐标系下的入射角。
太阳高度角αs与方位角ψs的计算关系为
(6)
式中:φL为当地纬度;δ为太阳赤纬;ωt为太阳时角;dn为年积日;t为真太阳时。
入射光线在地面坐标系下的单位向量表示为
(7)

(8)
1.5 蓄电池模型
基于蓄电池的简单等效电路模型,计算其能量输出
(9)

为了减小蓄电池损耗,提高电池使用寿命,不可以过充过放。电池荷电状态CSOC需满足约束条件
0.25≤CSOC≤0.99
(10)
(11)
2 能量管理策略设计
太阳能无人机的能量来自2个方面,一是起飞时蓄电池的初始电量,另一个是白天飞行中通过太阳能电池板收集到的太阳能。蓄电池的初始电量主要用于起飞以及最开始阶段的飞行,在长期留空飞行中,主要能量来源为太阳能。因此,太阳能-蓄电池系统主要用于供给电机-螺旋桨系统,维持飞行,并给电子负载提供能量。蓄电池的作用为能量储存以及功率匹配,因为太阳能在一天内能量变化规律为零-低-高-低-零,当太阳能功率较小时,由蓄电池提供额外能量,当太阳能功率充足时,额外功率储存进蓄电池。但是蓄电池容量有限,大量的蓄电池带来的载荷会降低太阳能无人机性能,将多余太阳能转化为重力势能将是可行的途径。此外,还应尽量以有利的参数飞行以减少功率损耗。因此,通过调整飞行过程中的飞行状态和轨迹,利用太阳能、蓄电池以及重力势能等转换关系,进行多能源的综合应用,可以提高太阳能和综合能量的利用率,实现能量管理策略的最终目的。
利用重力势能进行储能的太阳能无人机飞机运动主要分为3种飞行阶段[22]:
飞行阶段1 蓄电池充电以及爬升段
这一阶段主要是太阳能无人机利用太阳能爬升高度。该阶段开始时,太阳能可以维持飞机平飞,此后太阳能增加,多余的能量给蓄电池充电。当蓄电池达到最大充电功率后,多余的太阳能用于推进系统,飞机开始爬升,能量转化为重力势能。
飞行阶段2 重力势能滑翔段
当吸收的太阳能无法支撑太阳能无人机在最高点的平飞功率时,飞机开始下降。在该阶段,太阳能无人机的所有推进能量来自于太阳能,当太阳能衰弱至零时,太阳能无人机进行无动力滑翔。
飞行阶段3 最低高度平飞段
当太阳能无人机达到预定的最低高度时,转为第三阶段飞行,此时通过锂电池放电以维持在该高度飞行。该阶段的结束情况有2种:①蓄电池能量耗尽,电量状态达到下限,那么将再次进入无动力滑翔阶段,这在设计良好及正常使用情况下往往是小概率事件;②太阳能无人机依靠蓄电池能量顺利过夜,直到太阳能功率能够提供当前高度平飞需用功率,达到第一阶段条件。
太阳能无人机各个运动阶段均涉及能量管理策略的一部分。为此,根据每一阶段的飞行速度、推力、能量分配状况等设计能量管理策略,以实现最优的能量利用效率为目标。
飞行阶段1 该阶段开始为平飞,太阳能功率分配为
Psol=Pprop-Pbatt
(12)
此时,Psol>Pprop,为了获得尽可能小的Pbatt(Pbatt<0,表示蓄电池充电),应减小平飞推进功率。太阳能无人机处于平稳飞行状态,γ≡0,φ=0,此后分析中均认为太阳能无人机处于瞬时平衡状态,且姿态角按小角度近似为0处理。根据(1)~(4)式,可以计算得到所需平飞的推进功率为
(13)
(14)
当电池充电功率达到最大后,多余的太阳能开始推动无人机爬升。推进系统的功率一部分转化为重力势能,一部分用于抵抗阻力。对于某一航迹倾斜角,由阻力耗费的功率为
(15)

蓄电池功率设计为
(16)
式中,Plimit为蓄电池最大充放电功率。
无论是平飞还是爬升,太阳能无人机推进功率均为Pprop=Psol+Pbat。根据推进功率以及瞬时平衡假设,采用攻角α*,由(1)~(4)式可以计算得到当前功率对应的飞行速度V和航迹倾斜角γ。
飞行阶段2 当前阶段获取的太阳能不足以支持飞机爬升以及平飞,太阳能无人机开始从最高处利用重力势能滑翔下滑。当太阳能不为0时,进行有动力下滑;当太阳能为0时,进行无动力下滑,即Pprop=Psol。此时,蓄电池能量应当是满的,既不充电也不放电,即
Pbatt=0
(17)
下滑过程主要依靠重力势能转化为动能,为使无人机留空时间尽可能长,单位时间的下降高度需最小。太阳能无人机平稳滑翔时满足
(18)
则太阳能无人机的下沉速度为
(19)
从(19)式看出,太阳能提供的动力Psol可额外降低下沉速率。同样的,当α*确定,由(1)~(4)式和(18)式可求解得到滑翔时的速度V与航迹倾斜角γ。
飞行阶段3 该阶段太阳能无人机在最低高度处平飞,一方面是飞行任务有最低高度要求;另一方面是高度越低,平飞所消耗的功率越小。
当太阳能为0时,太阳无人机的飞行动力全部由蓄电池提供;当太阳能大于0时,由蓄电池和太阳能联合供电。因此,蓄电池功率为
(20)
同飞行阶段1的平飞段一样,太阳能无人机攻角选择α*,并可求得平飞的有利速度V。
3 航迹跟踪控制
太阳能无人机的航迹控制一是跟踪在地面的二维航迹,二是只要求太阳能无人机飞行时的地面投影与要求的航迹一致,不是实时的航迹跟踪。因此,只需控制航迹偏角ψ即可使太阳能无人机的x,y坐标跟踪航迹。此外,从以上分析可知太阳能无人机的速度V与航迹倾斜角是由能量管理策略决定的。因此,可将航迹跟踪问题解耦为对x,y坐标的外环控制,以及与对ψ,γ,V变量的内环控制。
对于内环控制,要求ψ,γ,V跟踪信号ψr(t),γr(t),Vr(t),控制变量为推力T、攻角α、滚转角φ。
对内环控制的状态微分方程进行反馈线性化。令
(21)
由此,可得反馈线性化后的状态方程
(22)
令跟踪误差为e1=ψ-ψr(t),e2=γ-γr(t),e3=V-Vr(t),则误差的状态方程为
(23)

(24)
(25)
根据杨氏不等式
可得
(26)
当参数ε满足
ε≤min{2k1,κσ}
(27)
可得
(28)
根据比较引理,则(29)式成立
V(t)<(V(0)-Δ)e-εt+Δ
(29)
式中,Δ=σ+σd2/2。
外环控制只需跟踪与时间无关的二维参考航迹,地面的参考航迹可以认为由一系列航迹点连接而成,当太阳能无人机到达一个航迹点后,开始飞往下一个航迹点。因此,将参考航迹离散化后,在每个时间段内,太阳能无人机坐标(x,y)的控制目标为(xr,yr),xr,yr为航迹点坐标,且为常数。令ex=x-xr,ey=y-yr为跟踪误差,则有
(30)
令
(31)
将关于ex,ey的状态方程线性化,即
(32)
取ux=-kxex,uy=-kyey(kx>0,ky>0),易知实现跟踪误差收敛。
(31)式给出了Vcosγ的值,该值为太阳能无人机速度在地面的投影。因为在能量管理策略中已经确定了速度V与航迹倾斜角γ的目标值,并通过内环控制进行跟踪,所以在外环控制中舍弃Vcosγ的控制输出,只给出航迹偏角ψ,并提供给内环控制器作为参考输入。
4 仿真验证
太阳能无人机的参数如表1所示。仿真位置的维度为40°N,飞行日期对应的年积日为182(平年对应的日期为6月21日),初始时刻为当地时间早晨6∶00,蓄电池初始能量为CSOC0=0.8。初始高度为0 m,初始速度为8 m/s。

表1 太阳能无人机基本参数
如果起飞阶段的太阳能水平不足以达到飞行阶段1的爬升标准时,设计了太阳能无人机的起飞过程,以最优攻角α*=2°,航迹倾斜角γ=2.9°进行爬升。
太阳能无人机升力系数、阻力系数与攻角的关系曲线如图2所示。升力系数与阻力系数均由分段函数表示,当攻角小于-4°或大于4°时,认为两者不再变化。
太阳能无人机按照设计的能源管理策略和航迹控制方法进行24 h仿真。太阳能无人机的飞行轨迹如图4所示。
可以看出,太阳能无人机从初始状态起飞前往距离最短的航迹点,然后循着航迹飞行。在24 h内,太阳能无人机沿着预设的航迹盘旋2周,飞行轨迹可以清晰地分为起飞阶段、爬升阶段、下降阶段、最低高度平飞阶段,与能量管理策略所设计的一致。太阳能无人机飞行的最高高度达到34 152 m,并且以整个飞行过程中最快的速度沿着给定航迹飞行了将近1周。
飞行过程中所涉及的太阳能无人机能量参数变化情况如图5所示。图5给出了太阳能功率Psol、推进系统功率Pprop、蓄电池功率Pbatt的相互关系。
图5中时间轴上0 h对应于起飞时间8∶00。起飞后2.9 h,蓄电池CSOC达到0.9,并且不再充电,太阳能功率全部供给推进系统。各系统功率满足Psol=Pprop-Pbat的功率分配情况,并且根据能源管理策略可清晰地分为3个阶段。阶段1的初始部分为起飞段,阶段2分为有动力下滑和无动力下滑,阶段3维持最低高度平飞。
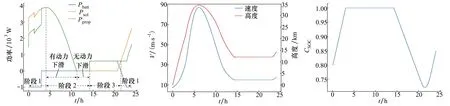
图5 太阳能无人机各系统功率关系 图6 太阳能无人机速度与高度 图7 蓄电池电量状态
太阳能无人机速度与高度变化如图6所示,速度与高度的变化趋势一致,高度越大则速度越高。蓄电池状态CSOC的变化如图7所示。在阶段1,蓄电池能量水平开始上升,在阶段2不变,阶段3持续放电。图7显示,蓄电池在24 h飞行后CSOC为0.85,大于初始的0.8,并且最低值为0.72,显示了太阳能无人机设计仍有改进空间。
太阳能无人机航迹跟踪内环控制的控制量为推力、攻角、滚转角。3个控制量的变化情况如图8所示。根据时间轴对应的各个阶段,推力在阶段1最大,阶段2最小,阶段3维持不变。攻角在大部分时间中处于稳定状态,稳定在效率最优的位置,这是在能量管理策略的预先设计。滚转角相对于攻角变化较为剧烈,主要是在太阳能无人机处于高度最高时,此时太阳能无人机速度最快,航迹偏航角变化剧烈。因此,在控制滚转角时超调量较大,在其他阶段滚转角基本维持在0°。
图8 太阳能无人机推力、攻角、滚转角
5 结 论
本文建立了太阳能无人机各组成部分系统模型,研究并设计了太阳能无人机的能量管理策略,形成了基于三维运动学方程的航迹跟踪控制方法。
1) 针对太阳能无人机高空长航时特点及任务特点,提出了太阳能无人机地面二维航迹跟踪方案。
2) 设计了具有最优飞行参数的太阳能无人机能量管理策略,在跟踪地面航迹基础上,利用重力势能储存多余太阳能,实现太阳能的最大利用效率。
3) 解耦了太阳能无人机动力学方程,采用反馈线性化方法设计了太阳能无人机的内环控制律及外环控制律。内环控制考虑到跟踪信号变化产生的不确定性,采用自适应控制方法,估计跟踪信号的一阶微分上界,利用Lyapunov理论证明了该内环控制律可使得跟踪误差有界。
4) 24 h不间断飞行且高度维持在12 000 m以上的太阳能无人机飞行仿真,结果验证了能量管理策略以及航迹跟踪控制的稳定性和有效性。同时,通过分析太阳能无人机各项参数变化情况,可以为太阳能的设计以及性能优化提供有益参考。
猜你喜欢
建材发展导向(2022年10期)2022-07-28
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
大众投资指南(2021年23期)2021-12-06
建材发展导向(2021年12期)2021-07-22
建材发展导向(2021年9期)2021-07-16
青年歌声(2019年12期)2019-12-17
课程教育研究(2018年14期)2018-06-07
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
中学生数理化·高一版(2016年5期)2016-05-14
