
基于TRIZ 理论的玻璃面巡检清洁机器人*
2023-05-10 10:26六盘水师范学院田红路高森林彭雯静张晓蔷张万贺
数字技术与应用 2023年4期
六盘水师范学院 田红路 高森林 彭雯静 张晓蔷 张万贺
基于TRIZ 理论的玻璃面巡检清洁机器人采用真空负压与数字图像识别等技术,由真空吸附履带、GP2Y1010AU 灰尘传感器、纳米滚刷等装置组成,能够在竖立的玻璃幕墙上自由移动,精确识别灰尘与污渍,无死角高效清洁玻璃面。同时内设超声波等传感器,能有效对玻璃面板进行探伤与松动检测,及时回传相应数据,减少不必要的损失,具有广泛的应用前景。
每年中国建筑面积约为500 亿平方米,玻璃幕墙占比约为5%,新建玻璃幕墙约为9000 万平方米,而现有的除尘解决方案虽然逐步由人工向机械过渡,但都面临着成本高昂效率低下的问题且具有很大的危险性。现有的清洁机器人不具备视觉识别及检测损坏中伤玻璃的功能,导致装置不能精准清洁灰尘与污渍,也不能及时发现松动与中伤的玻璃,容易造成安全隐患。
1 技术参数
(1)设备内置边缘及GP2Y1010AU 灰尘等传感器,检测玻璃面板灰尘与污渍,为设备运转提供识别障碍及确定灰尘与污渍的范围,时间周期约为0.02s,正确率高于99%。(2)在运动控制方面采用PID 控制算法,通过传感器和控制单元对机器人进行智能控制,在工作时系统运行稳定,故障率低,平均故障率在2%。(3)视觉处理使用ORB-SLAM2 算法的视觉处理效果,运动估计基于帧与帧的特征点跟踪和基于特征的光束平差对灰尘与污渍进行精确识别定位,操控机器人“重点清洁”。(4)在吸附贴合移动方面采用HUTTHINK 智能变频吸力算法的真空吸附方式及履带式驱动,脏玻璃表面附着硬颗粒污渍,大吸力干擦会导致玻璃划伤,变频算法自动识别表面脏污,柔和湿擦保护玻璃,干净玻璃也能自动识别并增大压力,清洁效率与清洁度增加10%;履带式驱动可使机器人跨越小型障碍,使机器人的清洁区域不再受限。
2 发明问题初始形势分析
2.1 问题分析
针对目前技术困境,团队进行相应问题分析并且提出问题。
(1)怎样高效的解决现有的除尘问题?(2)机器人怎样才能在竖直面爬行?(3)机器人如何才能实现移动功能,达到自动清洁的目的?(4)既是清洁机器人,如何实现清洁?(5)遇到玻璃老化、裂纹等情况无法进行检测反馈。
研究分析得出如下几种解决方案:
方案1:根据现有的除尘方式以及除尘需求,研发一款静电吸附除尘的装置;
方案2:研发一种真空吸附履带式驱动的机械装置,以兼顾吸附系统本身不受复杂的壁面环境的影响,适合不同样式楼梯清洗需要,逾越障碍的自适应机械装置;
方案3:在现有的清洁设备上添加视觉使其具备良好的可视化越障能力和智能化研判能力,既考虑运动的连续性控制和运动方向的随意性;
方案4:测绘及规划整栋楼清洗布局,可视化研判清洗刷头转速、碳刷静电转换吸附和清洗时长等智能化控制,高效清洁替代人工;
方案5:增加超声波探伤传感器,增加探伤检测功能。
2.2 限制条件
(1)设计中希望将设备的清扫面积扩大从而提升设备清扫效率,但是过大的面积也就意味着更大的重量,太重容易产生吸附不牢固出现高空掉落这种危险情况发生;(2)设备存在的功能兼顾较多,多样的功能会增加设备负载,导致续航能力下降;(3)高空玻璃上除污渍多样,使用普通刷头会影响清洁效率;(4)高空玻璃幕墙具有复杂的壁面环境,机器需要良好自适应越障能力。
3 系统分析
3.1 因果分析
现有的高空玻璃清洁主要由人工与机器来清洁,目前存在的主要问题是费用高、效率低、安全系数低,造成原因如图1 所示。

图1 因果链分析图Fig.1 Causal chain analysis diagram
(1)其中造成设备工作效率不高的原因是由于:设备是塑料材质且使用周期长导致吸盘易氧化,或者吸盘漏气和功率小形成的横向吸力较小,从而导致接触能力不足;还有受重力平衡钢绳、墙体结构、清洁刮板的局限,从而导致清洁范围受限。(2)其中造成设备工作效率不高的原因是污渍顽固,飞禽粪便板结,灰尘与雨水结合形成污垢,从而导致污渍粘连清洁周期长。
3.2 九屏图分析
如图2 所示分析可以得出当前清洁系统是人工清洁系统到智能清洁系统的过渡,未来高空玻璃清洁是以智能清洁机器人为主流。
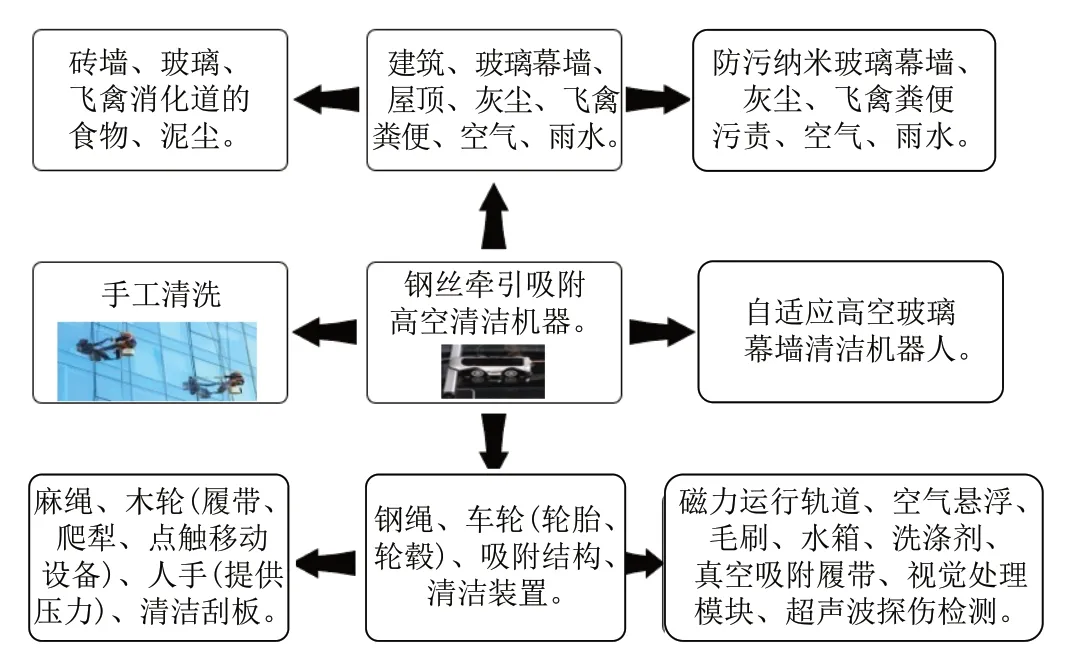
图2 九屏分析图Fig.2 Nine-screen analysis
针对以上问题我们提出了两种解决方案:
方案6:在玻璃幕墙上涂装纳米防污材料、在建筑上加装驱禽装置;
方案7:磁力吸附运行清扫系统,喷气推动运行清扫系统。
3.3 功能分析
(1)工程系统:Louluo 高空清洁机器人;(2)主要功能:对高空玻璃幕墙进行清洗检测;(3)组成部分:清洁组件、电池组件、水箱组件、吸附组件、移动组件、识别组件、检测组件、水;(4)建立功能模型图:对现有高空清洗系统的功能模型进行裁剪,如图3 所示,直线表示充分的作用,虚线表示不足的作用;(5)根据图3对功能模块图进行裁剪时我们发现了3 个不足之处:1)刮板对尘垢清洁不足;2)丝绳对机架支撑不足;3)行走轮对机架支撑不足。
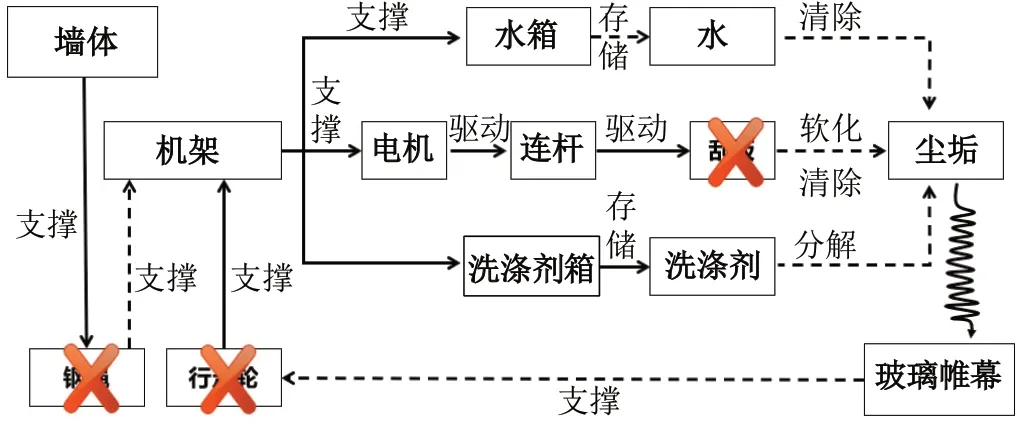
图3 裁剪功能模块图Fig.3 Cutting function module diagram
针对以上不足我们提出了两个解决方案:
方案8:把刮板式清洁装置改为电动滚刷式毛刷清洁装置;
方案9:运用有控制吸附方式的驱动履带取代钢丝绳及行走轮。
4 运用TRIZ 工具解决问题
4.1 技术矛盾
如果A+:提高机器吸附力;那么B+:提高负压装置功率;但是C-:降低移动阻率;如果A-:降低机器的吸附力;那么B-:降低负压机功率;但是C+:增加移动阻率;选择TC-1:技术矛盾发生在(吸附力)和(移动速率)之间,发生在清洁工作过程中[1]。
根据以上分析我们提出了两种解决方案:
方案10:应用15 动态性原理,增加功率控制模块,不工作时或者表面较干净时,速度快,工作时或表面污渍较多时,速度慢;
方案11:应用35 物理化学参数原理,改变刮板结构采用电动滚筒毛刷,采用纳米级清洁海绵材料。
4.2 物理矛盾[2]
该设备需要吸附力足够大,以增加设备的可靠性。该设备又需要吸附力小,以实现设备的灵活移动。
物理矛盾:设备又需要吸附力既大又小。
利用时间分离原理提出方案12:增加自动负压控制装置,在没有靠近玻璃时使用大吸附力,在玻璃上移动时减小吸附力。
4.3 金鱼法[3]
(1)将问题分为现实和幻想两部分:幻想部分-高效清除高空玻璃污渍;现时部分-高空玻璃污渍困难。
(2)幻想部分为什么不能实现?1)清洁技术不成熟,高空易坠落,安全隐患高;2)飞禽粪便不易刮落,污渍顽固,效率低下。
(3)在什么条件下,幻想部分可以变为现实?1)钢丝绳吸盘组合工作;2)增加视觉识别模块,脏的地方清洁时间长,干净的地方清理时间短。
(4)列出子系统、系统、超系统中的可利用资源,电动毛刷滚筒、OpenMV 模块、软化剂(反渗透阻垢剂)。
(5)从可利用资源的视角出发,提出可能解决问题的构想方案。
根据以上分析提出方案13:运用OpenMV 模块视觉识别使其对污渍进行精准清洁。
4.4 STC 算子分析
(1)想象研究对象的尺寸无穷大(S>∞)的解决思路。机器人的尺寸无穷大,使用超声波对整个建筑物进行超声波震动除尘。(2)想象研究对象的尺寸无穷小(S>0)的解决思路。机器人的尺寸无穷小,分子式机械,对单个灰尘进行分子清洁。(3)想象工作过程的时间或对象运动的速度无穷大(T>∞)的解决思路。机器人清洁污渍的时间无穷大,改进机器人的结构加设超声波检测模块,对玻璃进行探伤检测。(4)想象工作过程的时间或对象运动的速度无穷小(T>0)的解决思路。机器人清洁污渍的时间无穷小,改进刮板,使用滚筒毛刷,做到迅速除尘。(5)想象支出的成本(允许的支出)无穷大(C>∞)的解决思路。在玻璃上加装纳米涂层,定期进行更换。(6)想象支出的成本(允许的支出)无穷小(C >0)的解决思路。钢丝绳刮刷,地面手摇清洁机。
根据以上分析得出以下两种方案:
方案14:使用高压水射流装置对顽强污渍进行冲刷;
方案15:对玻璃幕墙的表面使用热膨胀及振动清洁装置。
5 技术方案整理与评价
对以上方案进行对比分析,可以看出方案5、方案6、方案7、方案9、方案12、方案13、方案14 这几个方案的性能更加优越,因此将这几种方案进行综合运用,提出最终理想解决方案。
在运动控制方面采用PID 控制算法,通过传感器和控制单元对机器人进行智能控制,以达到机械对高空玻璃面板进行巡检除尘,增大洁尘效率,并加入真空吸附驱动技术使设备能够附着在竖立的玻璃面板上。履带轮采用三层复合工艺提升摩擦力,不脱圈不打滑,与齿轮组配合,增大摩擦力使其驱动,同时加入运视觉处理效果。拥有丰富的硬件资源可利用在各种机械,并且涵盖范围广并在设备中添加超声波模块对进行玻璃面板松动及中伤检测,大大地减少了人工探查的成本,同时可使损坏的玻璃面板得到及时有效的更换。
6 结语
该系统采用智能变频负压吸附与履带式驱动相结合、视觉识别以及超声波雷达探伤处理装置。该系统工作时可以平稳地在竖直玻璃面板运行,控制清洁滚刷及高压水射流对污渍不同程度清刷,达到“重点清洁”,同时具有玻璃幕墙探伤功能,针对玻璃松动及裂伤,超声波模块可对玻璃面板松动进行智能巡检,实时通信反馈。提高了玻璃清洁工作速率同时也降低了危险性,大大降低了清洁成本,减少了资源浪费,具有很好的应用及推广价值。
猜你喜欢
英语世界(2023年11期)2023-11-17
船海工程(2022年6期)2023-01-02
好日子(2021年8期)2021-11-04
机电工程(2020年10期)2020-11-04
石家庄铁道大学学报(自然科学版)(2020年4期)2020-02-22
上海建材(2018年4期)2018-11-13
中国洗涤用品工业(2011年6期)2011-03-20
