
机械化除草装备与技术研究现状及发展趋势
2023-05-09 12:19唐子昊奚小波张宝峰杜晋史扬杰张翼夫秦康生张瑞宏
杂草学报 2023年4期
唐子昊 奚小波 张宝峰 杜晋 史扬杰 张翼夫 秦康生 张瑞宏
摘要:除草是农业生产过程中不可或缺的一环,国内目前农田杂草防除主要以化学除草为主,但长期使用化学除草会造成杂草抗性上升、农业环境污染、农作物药害等问题,机械除草在无上述危害的同时还可改善土壤环境、促进作物生长发育,有效替代化学除草 。为能给我国机械除草高新技术推广提供参考,本文将现今国内外除草机械划分为水田除草机械、旱田除草机械与除草机器人系统,对其研究现状和发展动态进行阐述和剖析,并结合绿色农业相关研究、发展要求与我国目前接近7 000万hm2化学除草面积的客观情况,提出构建“以机械防治为主,机械-化学防治并举”的协同防治思路,最后总结出国内机械除草装备向着信息化、仿生化、复合化、模块化等方向发展的趋势。
关键词:农业机械;水旱田机械除草;除草机器人系统;机械-化学协同除草;发展趋势
中图分类号:S224.1+5 文献标志码:A 文章编号:1003-935X(2023)04-0014-16
Research Status and Development Trend of Mechanized Weeding Equipment and Technology
TANG Zi- hao1, XI Xiao- bo1, ZHANG Bao- feng1, DU Jin2, SHI Yang- jie1, ZHANG Yi- fu1, QIN Kang- sheng1, ZHANG Rui- hong1
(1.School of Mechanical Engineering,Yangzhou University/Jiangsu Engineering Center for Modern Agricultural Machinery and Agronomy Technology,Yangzhou 225127,China; 2.Yangzhou Polytechnic College,Yangzhou 225009,China)
Abstract:Weeding is an indispensable link in the process of agricultural production,domestic currently mainly chemical weeding is given a priority,but long-term use of chemical weeding will cause resistant weed reproduction,agricultural environmental pollution,crop herbicide injury and other problems. Mechanical weeding also can improve the soil environment,promote crops growth and effectively replace chemical weeding. To provide reference for promotion of mechanical weeding high and new technology in our country,this paper divides the mechanized weeding technology at home and abroad into paddy field weeding machinery,dry field weeding machinery and weeding robot system,explores the research situation and development,and suggests to build synergistic weeding ideas of “mainly mechanical weeding,mechanical-chemical weeding simultaneously”combining green agriculture related research and development requirements and the objective situation close to 70 million hm2 of chemical weeding area. Finally,it summarizes the domestic mechanical weeding equipment toward informatization,bionics,compound and modularization.
Key words:agricultural machinery;mechanical weeding in paddy and dry fields;weeding robot system;mechanical-chemical synergistic weeding;development trend
田間杂草作为农田生态系统中的一个重要组成部分,对农作物生产有直接或间接影响。联合国粮食及农业组织(FAO)报道表明,世界粮食作物收获前因遭杂草损失减产约10%,损失粮食近 2.9亿t[1]。我国因杂草引起的粮食损失约占粮食总产量的10%,每年因此损失的粮食达百亿千克。为了有效防除田间杂草,目前各国普遍使用化学除草剂,但长期使用化学除草剂带来了土壤肥力破坏、土壤微生物区系受损、耐药性杂草滋生、农药残留等一系列问题[2]。随着现代农业的发展,加之国家大力提倡“绿色防除杂草”“减药增效”,除草剂减量防治技术逐步发展,机械除草、农业防治、生物防治等非化学除草技术得到了更多的研究和应用。
机械除草一直是非化学除草技术的重要研究突破口,具有环境友好、针对性强、兼具农艺功能等优点,通过不同类型的除草机进行耕、翻、耙、中耕松土等措施在种植的不同时期进行除草,灭杀已发芽的杂草或将草籽深埋,或将地下茎翻出地面使之干死、冻死[1]。本文将分别从水田与旱田、行间除草与株间除草的角度介绍国内外除草装备与技术的研究现状,并对机械化除草技术研究趋势进行预测。
1 水田除草机械
水田主要分布在热带、亚热带、温带季风区,常年或夏季气温较高,全年热量充足;年降水量800 mm以上,降水充沛,雨热同期,灌溉方便。目前国内外对水田机械除草的研究主要集中在水稻田除草上,通过机械除草不仅可以控制杂草,还可以增加土壤透气性,提高地表温度,促进肥料吸收[3]。由于水稻苗种植密度大,水田环境复杂,各国研究人员为解决作业效率低、除草效率低、伤苗率高等问题不断进行研究与尝试。
1.1 水田除草机械结构创新
水田的除草机械结构比较复杂,核心是通过除草部件旋转、抛、拉、埋等机械动作达到去除杂草而不损伤水稻苗的效果。常用的除草部件有笼辊式、麻花齿辊式、排齿式、弹齿式、梳齿式等[4],按运动方法则可分成对转式、摆动式和固定旋转式三大类。
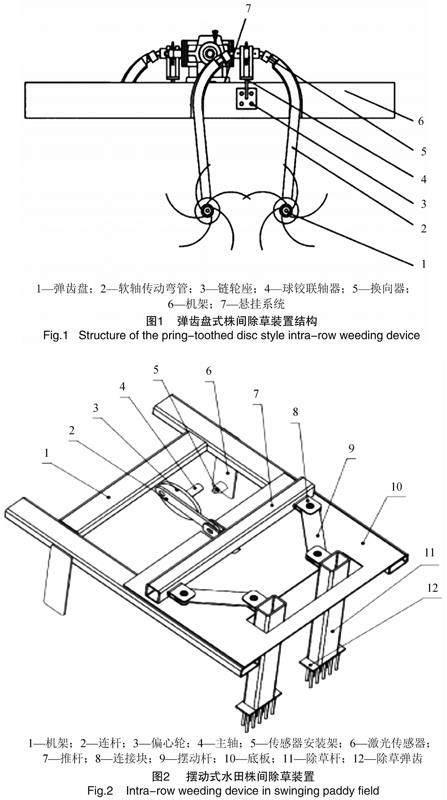
对转式水田除草装置常用于株间除草,通常由1对相对旋转的弹簧齿盘组成,由于除草齿材料的弹性特征,对水稻幼苗损伤很小。图1为陶桂香等设计的弹齿盘式株间除草装置[5],除草部件左右两侧对称安装,弹齿形状呈曲线形且旋向与圆盘转向相反,1根轴连接除草部件上的2根钢丝软轴,主动链轮转动,动力从球铰万向联轴器传到弯管内的钢丝软轴,当软轴工作时,相邻2层钢丝中的1层趋于缠紧,另1层趋于松动,使各层钢丝相互压紧,软轴带动弹齿盘将土壤翻转搅动,从根部去除杂草。
摆动式水田除草装置是通过水平方向往复摆动的梳齿对杂草梳拉进行除草作业。图2为田亮等研发的摆动式水田株间除草装置[6],该装置通过激光传感器确定秧苗位置,结合机组前进速度,伺服电机控制偏心轮运动,连杆带动推杆从而改变2个摆动杆的夹角,驱使除草杆左右摆动,2组除草弹齿随之张开或闭合,完成除草与避苗2个状态的来回切换,实现株间避苗除草作业。
旋转式水田除草装置通常是凭借机具驱动行走动力带动除草轮旋转以消灭行间杂草,针对现有行间除草轮土壤扰动率低、易黏附土壤和挂草、除草作业性能不稳定等问题,王金武等设计了被动式曲面轮齿斜置式稻田行间除草装置(图3),该装置通过将除草轮安装改为斜置式,在保证有效作业宽度不变的情况下,减少对水稻根系的破坏,避免稻株茎叶受损和挂草, 其除草率达89.66%,伤苗率仅2.1%[7]。
除在现有旋转式除草装置结构研究的基础上,为进一步提高防控效果,齐龙等发现在水田除草作业时,可通过对杂草的机械埋压与拉拔,将稻田水层搅浑,从而削弱杂草的光合作用;于是利用ANSYS软件仿真模拟耙压式除草轮与土壤-水耦合物质的相互作用过程,最终仿真结果显示,当除草齿折弯角度θ=10°时,除草轮所受的垂直反作用力与对地面的压力相等,此时除草轮无下陷且跳动小[8]。在这一成果的基础上,研发出如图4所示的一款防下陷和入土性能都比较好的耙压式除草轮,交错排列的耙齿提高了除草范围,弯曲的齿端提高了入土性能。通过田间试验,在转速为160 r/min时,除草率可达93.2%,伤苗率仅为1.2%[9-10]。
1.2 水田除草控制系统与图像处理技术创新
单纯对水田机械除草结构进行创新局限于利用稻苗和杂草扎根深度与强度的差异,而非通过智能系统进行选择性除草,除草机前进路线与苗带行无法精确匹配,为了达到理想除草效果,往往需要多次田间作业,无形中增加了伤苗率。针对这一难题,须要对水田除草机的控制系统与图像技术进行创新。
陈学深等基于触觉感知技术研发出一款自适应振动式稻田柔性除草机(图5),通过双排柔性刷指搭配气压传感器,工作时前排刷指梳刷杂草,气压传感器获取水稻根系与前排刷指的力学反馈数据进行水稻倒伏的识别,后排除草刷指根据识别结果控制横向振动杂草系统的启停。该机具可在不进行避苗作业的前提下,兼顾除草率与伤苗率[11]。
国内外很多研究都将图像处理算法与除草机路径规划相结合,王金峰等设计的具有稳定人机交互系统的除草机如图6所示,可在田间进行遥控转向,通过设备前方的摄像头将田间信息传递到人机交互界面,工作人员根据信息下达转向指令,转向舵机根据电信号调整转向轮角度实现转向,该机转角在0°~20°时调节控制系统的控制精度较高,前进速度为0.4~0.6 m/s时,可以将除草率保持在77.9%以上,伤苗率保持在3%以内[12]。
由于水面的光照反射使得水田作物行识别较为困难,Chen等设计的图像处理方法,通过比较图像中每个像素的蓝色和绿色强度,即可简单地确定水稻行之间的空间,再根据稻田的生长水平,通过分析二值图像的每个水平线剖面,最终计算出机组除草作业时最佳的行进路线[13]。如图7所示,Kaizu等則是开发了一种双光谱相机系统,通过1对带滤光片的低成本单色相机,实时拍摄同一位置的不同波长图像。在多云条件下进行的试验表明,该系统可以降低水面噪声,清晰地检测出作物行,从而方便除草机进行导航[14]。
2 旱田除草机械
旱田是指土表不蓄水或浇不上水的耕地。我国耕地超60%都是旱田,主要分布在东北三省、黄土高原、青海西藏地区等北方地区[15]。我国五大作物中有4个属于旱田作物,此外旱生农作物还包括生菜、棉花、甜菜、茶树、果园中的蔬菜等作物及经济作物[16-17],因此旱田除草机械的研发非常重要。
2.1 旱田除草机械结构创新
目前旱田除草部件根据适用作物类型的不同主要有5种结构,如图8所示,分别是耙轮式[18-19]、刷式[20]、梳齿式[21]、铲式[22]、旋转刀片式[23]。
在果园作物除草方面,因为果树枝干弯曲载荷承受能力较大,现有研究往往采用铲式、耙轮式、刀片式等部件结构搭配固定式、旋转式的运动方式。图9为王磊等研制的果园自动让树除草机,除草部件是分别安装在主机架前后的2组除草铲,在机架上的弹簧拉杆可以改变除草部件工作深度,最终以旋耕的方式进行行间除草,最大除草深度可达16 cm[24]。曾晨等设计的小型自走式茶园除草机如图10所示,工作时,机架两侧除草轮圆柱上的除草刀片依次入土,经试验得出,当除草轮转速为350 r/min、机具前进速度为3 km/h、除草深度为30 mm、安装6个除草刀片时效果最优,除草率可达80.7%[25]。如图11所示,赵诗建等对不同直径猕猴桃树干最大弯曲承受力进行试验,以确定对不同大小猕猴桃除草时避障弹簧强度与作业速度的最优组合,经试验,在选定的最优工作参数组合下进行田间除草作业时,可实现除草率达90%的同时对果树零损伤[26]。
旱田粮食与蔬菜作物行间除草的研究已经比较成熟,王刚等设计了一种触碰定位式玉米行间除草装置,其不依赖智能导航平台,仅使用行程开关即可完成避苗行间除草,工作时除草部件在行间通过对杂草施加梳刷力将其拉断或拔出,但当和行程开关相连的软轴触碰到玉米茎秆时,除草执行部件执行躲避动作而避免伤苗,该除草装置的平均除草率为95.1%,平均伤苗率仅为1%[27]。
如图12-a所示,国内还有将行间除草轮设计与仿生学结合的研究,杜伟等以栉孔扇贝瓣为仿生原型,在除草轮刀片上引入贝壳表面的棱纹结构,以减少土壤阻力,并增加土壤扰动[28]。尹志平以东北鼹鼠爪趾的中趾作为仿真对象,分析爪趾的减阻特征与破土特点,设计出如图12-b所示的仿生双翼除草铲,研究表明,在装配12片仿生铲刃,除草速度为1.8 km/h时,除草效果最佳且土壤扰动率仅为普通除草铲的44.7%[29]。
粮食与蔬菜作物的茎秆相对脆弱,因而涉及株间除草的机械结构时,国内外大都选择旋转式、摆动式和爪齿式这3个运动结构,旋转式株间除草装置在结构方向上一般通过刀具的旋转将杂草从根部切断。贾洪雷等设计了一种螺旋式玉米株间除草机构,该机构通过红外对射管识别玉米植株,螺旋式前进的锥形除草刀通过滑切去除株间的杂草[30]。Igawa等针对生菜除草设计了一种除草机器人,机器人前端有1个两自由度系统的机械臂,工作时机械臂上安装的锯片旋转切除杂草[31]。
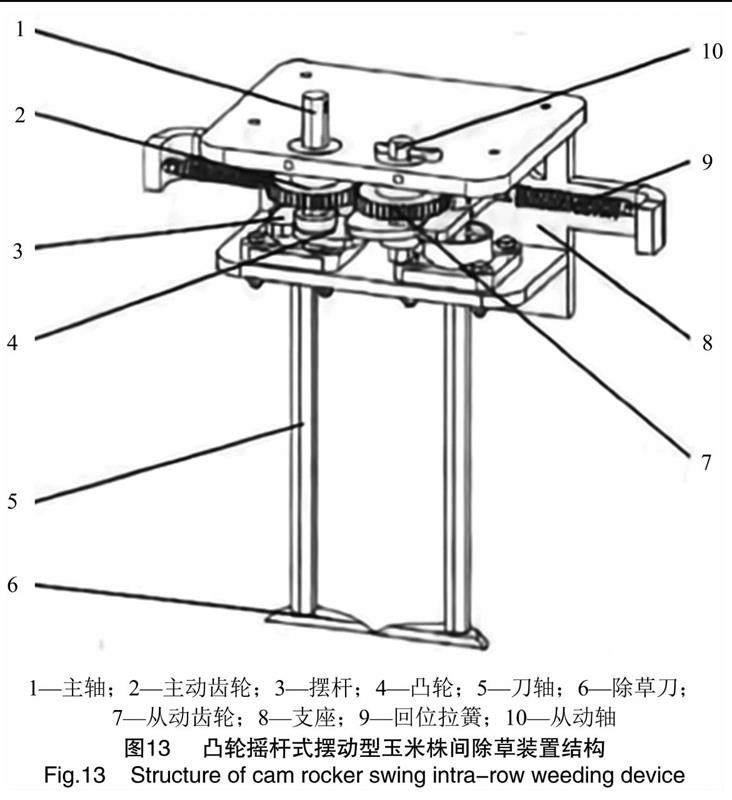
摆动式运动结构的难点是如何通过除草刀摆动与复位,完成对株间杂草的切除和对作物植株的避让。如图13所示,周福君等设计了凸轮摇杆式的摆动型玉米株间除草装置,作业时拖拉机作为动力输出,2个除草刀位于株间苗带的两侧,当除草刀靠近玉米苗时,限深轮上的霍尔开关发出脉冲信号,单片机接受到信号后开始工作,传给电机驱动器使电机运转;旋转带动除草装置顶部的主轴转动,啮合齿轮将动力传给2个下凸轮,进而推动2个摆杆带动除草刀向后摆动避苗,完成避苗后,除草刀受拉簧拉力复位。通过综合加权评分确定最佳组合为除草刀转速130 r/min、弹簧刚度60 N/mm、机组前进速度2.2 km/h,此时除草率可达89.8%,伤苗率仅2.1%,作业性能相较于传统株间除草机械,达到优良标准[32]。
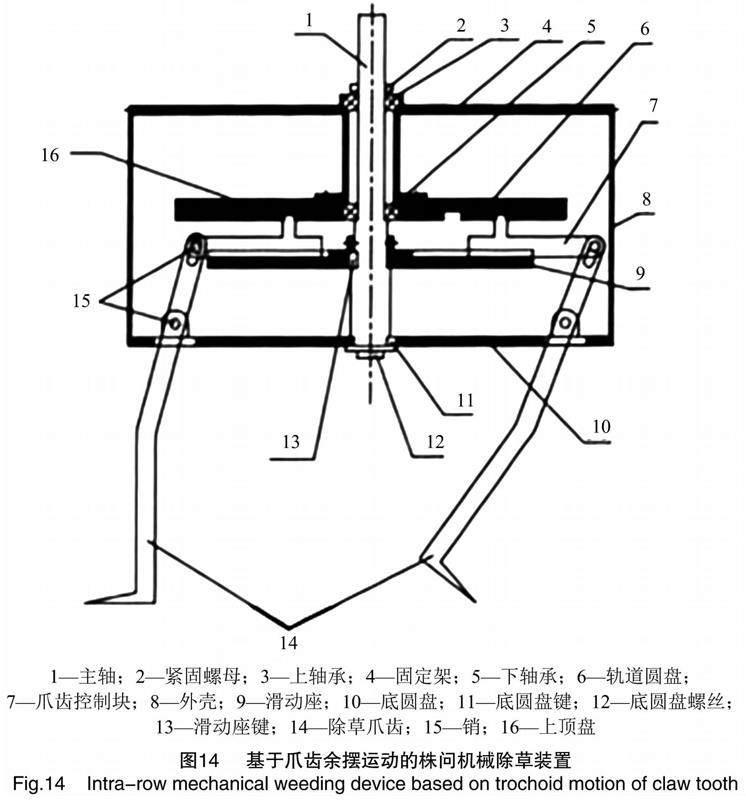
爪齿式株间除草装置通过除草爪齿的收拢展开结合特定运动路径实现避苗与除草,早在20世紀90年代,德国Amazone公司就研制了爪齿摆线锄草刀[33]。图14为胡炼等设计的余摆式爪齿株间除草装置,将除草爪齿运动路径设置为余摆线,爪齿去除每次路径环扣部分内的杂草[34]。陈树人等研发了有相似结构的八爪式机械株间除草装置控制系统[35]。上述几种爪齿式除草机的除草效果均很好,伤苗率都在10%以下,但缺点是操作难度大、维护成本高,作物识别定位功能、横向偏移补偿功能还需要优化。
2.2 旱田除草控制系统与图像处理技术创新
为达到旱田机械除草“多除草,少伤苗”的目标。一方面要在除草机构上进行优化,另一方面利用光谱技术、控制系统、机器深度学习等检测方法[36-38]提出更佳的杂草精确识别方案。
20世纪90年代开始,国外将研发的重点聚焦于除草部件工作深度的监控与控制。Lee等采用非接触式传感器测量除草工作深度,其优点是不损伤作物,但容易受到农作物干扰,无法很好地区分作物和土壤表面[36]。van der Linden等开发了一种红外激光传感器来改善行间除草机工作深度的控制,其原理是利用植物光谱反射率曲线中的“红边”来分辨检测土壤和作物,试验时传感器分别在含水量为25%、20%、15%和10%的土壤中工作,其深度测试结果稳定,土壤和作物的判别误差在5%以内,并可在运动过程中以5 mm可重复精度检测深度[37]。Jeon等开发的杂草控制系统使用识别摄像头加机械臂控制锯盘,该系统利用从图像中识别的杂草几何矩确定杂草中心,进而通过Visual Basic程序控制机械臂运动进行除草作业,其锯盘分为上下2层,工作时上层锯盘旋转切除杂草,下层锯盘在杂草切面上涂上化学药物抑制生长,除草率可达83%[38]。权龙哲等设计了基于YOLO v4模型来检测玉米苗和杂草的株间除草方案,杂草和玉米苗在尺寸上相差较大的3~5叶期,通过将输出张量26×26尺度改为输出13×13和52×52等2种尺度的预测张量来提高检测速度,该系统的玉米苗检测率高达96.04%,杂草检测率可达92.57%[39]。胡炼等研究发现,机械除草装置的牵引拖拉机在对行行驶时总会产生误差[CM(21],导致除草装置出现横向偏移,因此开发了株间机械除草装置和作物行的横向偏移量识别方法,通过设计特定的跟踪机构和控制器并用正弦波、三角波2种标准信号作为横向偏移补偿量信号,实验室环境下已经将伤苗率控制在12%以内[40]。Chen等提出了一种针对白菜与洋葱株间除草的末端执行器自动调平系统,该系统可在不平坦田间作业期间将除草刀倾斜度与横滚俯仰角精确分别控制在0.25°和9°以内,提高了除草精度[41]。
[BT1][STHZ]3 除草机器人系统
随着自动导航、机器视觉、集成电路等技术的飞速发展,除草机器人正逐渐成为机械化除草装备的研发热点,其凭借智能控制系统对环境信息的识别,进行路径规划与导航,极大地提高了除草效率、降低了劳动成本[42-43]。现有除草机器人按行走方式可分为轮式、足式和履带式3类。轮式除草机器人因为造价便宜、行进平稳,是现在主流研发方向[44-45];足式除草机器人因为落脚点分散,可在复杂农田环境下工作[46];履带式除草机器人因为行走装置与地面的接触面大,行驶较为平稳,可在松软泥泞的土壤环境下工作[47]。
[BT2]3.1 国外除草机器人系统研究现状
国外典型的轮式机器人有如图15所示的除草机器人HortiBot[48],其被《时代》评为2007年最佳发明奖,由中央液压马达作为动力源,直流电机控制转向,搭配的HCC系统能依靠摄像头控制行走路线,并根据叶片形状和方位对杂草进行识别与割除。而Deepfield Robotics公司则是将除草机器人赋予决策树机制,如图16所示的Bonirob可以根据前期学习作物图片与杂草图片在实际工作时对比叶片外观进行判断除草,这得益于学习机制,Bonirob的作业准确率会随工作时长增加,经试验,除草率高达90%[49]。足式比较领先的机器人系统为Amer等研发的Agri Bot多功能农业机器人,如图17所示,通过Raspberry Pia对该机器人进行控制,6条机械腿可适应各种地形[50]。图18为韩国Triaxle有限公司研发的履带式自动除草机器人[51],底盘两侧履带搭配前后[KG*8]2[KG*8]种除草刀让该机器人同时在正常和潮湿土壤上工作。
3.2 国内除草机器人系统研究现状
国内轮式机器人研究处于领先的有权龙哲等研发的深度学习技术与针对性除草模式相结合的智能除草机器人系统,如图19所示,该系统由1个移动机器人平台和2个智能除草单元组成,移动机器人平台提供动力,基于深度学习的系统可以根据检测结果提出针对性的除草方案,该平台还搭配普通、楔形、犁面等3种不同除草刀,可根据田间环境进行自动换刀,其除草率达85.91%,伤苗率为1.17%[52]。履带式方向的研究有夏欢设计的一款采用履带式底盘结构的水田踩踏式除草机器人(图20),该机器人在水田行驶过程中在搅起浑浊泥水抑制杂草光合作的同时对杂草进行踩踏与铲除,从而完成除草作业过程[53]。
对比国外除草机器人系统的研发,我国在机械结构、除草方式、控制算法等关键领域已经取得了长足进步,但是在功能复合化、视觉图像识别、技术交叉融合等方面与国外相比还有较大差距。
4 机械-化学协同除草技术
机械化除草有着环境友好、针对性强、见效快、兼具农艺功能等优点,但目前国内外广泛应用的机械除草仍停留在耕、翻、耙等措施上,其除草部件难以完全打破土壤和杂草的团聚状态,导致机械除草后杂草往往除而不死,除草效果并不理想[54]。Richard等调查使用不同机械除草方法对卢森堡有机大豆杂草的影响,发现如果想要完全控制大豆栽培中的多年生杂草,必须采取长期的除草策略,单一的机械除草不足以达到理想效果;且是否在除草的最佳时机对机械除草效果影响非常大,还要考虑天气条件的影响,种种原因让杂草控制的窗口期通常非常小[55]。国内如今又伴随着农村劳动力转移一系列问题,将接近7 000万hm2使用化学除草的田块短期内全部改为机械或其他绿色除草技术同样不现实[56]。所以,先用机械除草替代部分化学除草,再构建以机械防治为主,这种机械-化学防治为辅的协同防治策略更符合我国国情。
20世纪90年代以来,Mulder等发现将化学除草与机械除草结合,与单一机械除草比较,在杂草控制、作物产量和经济效益等方面均有较大提升[57]。Donald等在玉米和大豆的田间管理中采用机械行间除草与化学除草剂减施相结合的方法,结果表明,除草剂的最大施用量減半的情况下,作物产量仍可得到保证[58]。在国内,方会敏等以玉米为对象,分别研究行间与株间机械除草方式,减施25%、50%、75%的除草剂及使用全幅和苗行2种施药方式对防除效果的影响,结果表明,各混合除草模式下平均产量均高于单一除草模式[59]。
在Jacquet等在葡萄栽培中使用机械-化学除草模式取代化学农药除草后的微观经济影响研究[60]和Pradel等引入自主机器人系统对葡萄园效益影响的研究[61]中,因为人工成本的增加和购买新设备的支出,使用单一机械化或机械-化学模式会比仅使用化学农药增加成本。但通过给予农户与企业足够的过渡时间,加强政府在财政方面的补贴,销售时突出强调机械除草,主打绿色食品证明产品高价的合理性等措施完全可以推动该模式的推广。
5 机械化除草技术研究趋势及预测
通过对国内外水旱田除草机械发展现状进行归纳分析,预测出以下发展趋势:(1)智能化。机械化除草装备设计逐步从传统机械式向集机、电、液、气、控制技术于一体的高度集成的智能化除草机器人平台发展,且具有自动换刀的田间除草机器人技术将会是新的研究热点。(2)多功能一体化与模块化。除草装备整机研发向着多功能一体化融合方向发展,通过设计不同的功能模块,能对不同的功能模块进行组合,一机多用,以减少机具下地次数,保持土壤疏松的结构,节本降耗。(3)除草技术复合化。将机械除草技术与其他除草技术合理结合使用,形成复合除草技术,提高除草作业综合效益。(4)仿生化。在除草部件设计上,对土壤动物的生物结构进行模仿,形成仿生机械除草技术,以提升除草性能。(5)小型化。该趋势主要体现在水田与果园机械中,因为行间、株间除草时空间都很有限,机型便设计得较为紧凑,向着小型、轻量化方向发展。不仅提升了机器的操作性,还提高了空间利用率,增加了水田生产效率。(6)信息化。人工智能、物联网、大数据、自动驾驶等信息技术的发展为除草机械的研究带来了新的机遇,为打破传统技术壁垒提供了新的方案与可能,从而实现农业全过程现代化。
6 结论
(1)株间除草技术尚不成熟。目前国内外水旱田行间除草技术都相对成熟,机具选择较多,但在株间除草方面仍存在除草率低、伤苗率高的问题。且因为株间除草的作业思路大多横跨在作物行中进行,至今对果树类等较高作物的株间除草还没有太优秀的方案。
(2)实际应用与产业化发展任重道远。目前国内有关机械除草的研究还仅仅局限于理论或实验室阶段,并未投入到实际应用中,产业化也并未形成,优秀的除草机械应该在市场中、在实际应用中不断升级优化。
(3)整体思维,步步为营。因为国内在机械化除草上研究起步较晚,虽已呈现智能除草装备研发稳步推进、除草环节与农艺快速融合等特点,但与西方国家相比,国内除草机械的技术性、效率性、持续性等方面还没有达到农业发展现代化的要求。
(4)尊重差异,实事求是。我国不同地区存在自然环境差异大,社会经济发展不平衡,作物种植结构多样的客观现实,想要“一刀切”地大规模推广机械化除草并不现实,但随着绿色健康的观念深入人心,政府逐渐加大政策、经济上的扶持力度,加之广大科研工作者的不断研究,相信在未来一定能形成一套针对不同地域、不同作物的完整机械化除草技术系统。
参考文献:
[1]李江国,刘占良,张晋国,等. 国内外田间机械除草技术研究现状[J]. 农机化研究,2006,28(10):14-16.
[2]吴亦鹏. 水田机械除草应大力推广[J]. 农机市场,2021(6):19.
[3]Rebich R A,Coupe R H,Thurman E M. Herbicide concentrations in the Mississippi River Basin—the importance of chloroacetanilide herbicide degradates[J]. Science of the Total Environment,2004,321(1/2/3):189-199.
[4]馬 旭,齐 龙,梁 柏,等. 水稻田间机械除草装备与技术研究现状及发展趋势[J]. 农业工程学报,2011,27(6):162-168.
[5]陶桂香,王金武,周文琪,等. 水田株间除草机械除草机理研究与关键部件设计[J]. 农业机械学报,2015,46(11):57-63.
[6]田 亮,曹成茂,秦 宽,等. 摆动型水田株间除草装置设计与试验[J]. 浙江农业学报,2022,34(8):1772-1783.
[7]王金武,马骁驰,唐 汉,等. 曲面轮齿斜置式稻田行间除草装置设计与试验[J]. 农业机械学报,2021,52(4):91-100.
[8]齐 龙,梁仲维,马 旭,等. 耙压式除草轮与水田土壤作用的流固耦合仿真分析及验证[J]. 农业工程学报,2015,31(5):29-35,37,36.
[9]齐 龙,梁仲维,蒋 郁,等. 轻型水田除草机的设计及试验[J]. 吉林大学学报(工学版),2016,46(3):1004-1012. [ZK)]
[10][ZK(#]梁仲维,齐 龙,马 旭,等. QSC-2型步进式水稻除草机的设计与试验[J]. 农机化研究,2015,37(8):115-119.
[11]陈学深,熊悦淞,程 楠,等. 自适应振动式稻田株间柔性机械除草性能试验[J/OL]. 吉林大学学报(工学版). (2022-07-26)[2023-12-19]. https://doi.org/10.13229/j. cnki.jdxbgxb20220350.
[12]王金峰,翁武雄,鞠金艳,等. 基于遥控转向的稻田行间除草机设计与试验[J]. 农业机械学报,2021,52(9):97-105.
[13]Chen B,Tojo S,Watanabe K. Machine vision for a micro weeding robot in a paddy field[J]. Biosystems Engineering,2003,85(4):393-404.
[14]Kaizu Y,Imou K. A dual-spectral camera system for paddy rice seedling row detection[J]. Computers and Electronics in Agriculture,2008,63(1):49-56.
[15]论中国确保18亿亩耕地“红线”的必要性与对策措施体系[C]//刘彦随. 中国土地资源可持续利用与新农村建设研究. 重庆:西南大学出版社,2008:31-37.
[16]蔡丽君,张敬涛,盖志佳,等. 东北三江平原覆盖作物种植效果[J]. 应用生态学报,2022,33(10):2736-2742.
[17]Yan X Y,Xia L L,Ti C P. Temporal and spatial variations in nitrogen use efficiency of crop production in China[J]. Environmental Pollution,2022,293:118496.
[18]Pullen D W M,Cowell P A. An evaluation of the performance of mechanical weeding mechanisms for use in high speed inter-row weeding of arable crops[J]. Journal of Agricultural Engineering Research,1997,67(1):27-34.
[19]Sharma B,Singh S K,Gupta S,et al. Improving efficiency and reduction in drudgery of farm women in weeding activity by twin wheel hoe[J]. Indian Research Journal of Extension Education,2015,15:76-80.
[20]Melander B. Optimization of the adjustment of a vertical axis rotary brush weeder for intra-row weed control in row crops[J]. Journal of Agricultural Engineering Research,1997,68(1):39-50.
[21]Rasmussen J. Testing harrows for mechanical control of annual weeds in agricultural crops[J]. Weed Research,1992,32(4):267-274.
[22]Meyers J M,Miles J A,Tejeda D G,et al. Priority risk factors for [JP2]back injury in agricultural field work[J]. Journal of Agromedicine,2002,8(1):39-54.
[23]Kwon T H,Kim J,Lee C G,et al. A study on rotary weeding blade installation angle for reduction of hand vibration in working type cultivator[J]. Journal of Biosystems Engineering,2014,39(1):11-20.
[24]王 磊,张 斌,张宏文,等. 果园株间除草自动让树装置的设计[J]. 农机化研究,2018,40(10):69-74.
[25]曾 晨,李 兵,李尚庆,等. 自走式茶园除草机的设计与试验[J]. 农机化研究,2016,38(12):101-106.
[26][JP]赵诗建,卢彩云,李守忠,等. 猕猴桃株间机械避障除草机作业性能优化与试验[J]. 农机化研究,2023,45(10):134-142.[JP+1]
[27]王 刚,刘慧力,贾洪雷,等. 触碰定位式玉米行间除草装置的设计与试验[J]. 吉林大学学报(工学版),2021,51(4):1518-1527.
[28]杜 伟,海文博,刘春雨,等. 基于贝壳棱纹结构的仿生除草轮设计与分析[J]. 农机化研究,2023,45(6):94-99.
[29]尹志平. 基于鼴鼠爪趾结构仿生除草铲的设计与试验研究[D]. 长春:吉林大学,2022.
[30]贾洪雷,顾炳龙,马中洋,等. 螺旋式玉米株间除草执行机构优化设计与试验[J]. 农业工程技术,2022,42(12):115.
[31]Igawa H,Tanaka T,Kaneko S,et al. Base position detection of grape stem considering its displacement for weeding robot in vineyards[C]//38th Annual Conference on IEEE Industrial Electronics Society. Montreal:IEEE,2012:2567-2572.
[32]周福君,王文明,李小利,等. 凸轮摇杆式摆动型玉米株间除草装置设计与试验[J]. 农业机械学报,2018,49(1):77-85.[JP+1]
[33]Laurent K,Thomas P. Grass handler for mower:DE19535362A1[P]. 1997-03-27.
[34]胡 炼,罗锡文,严乙桉,等. 基于爪齿余摆运动的株间机械除草装置研制与试验[J]. 农业工程学报,2012,28(14):10-16.
[35]陈树人,张朋举,尹东富,等. 基于LabVIEW的八爪式机械株间除草装置控制系统[J]. 农业工程学报,2010,26(增刊2):234-237.
[36]Lee J,Yamazaki M,Oida A,et al. Non-contact sensors for distance measurement from ground surface[J]. Journal of Terramechanics,1996,33(3):155-165.
[37]van der Linden S,Mouazen A M,Anthonis J,et al. Infrared laser sensor for depth measurement to improve depth control in intra-row mechanical weeding[J]. Biosystems Engineering,2008,100(3):309-320.
[38]Jeon H Y,Tian L F,Grift T E. Development of an individual weed treatment system using a robotic arm[C]//American Society of Agricultural and Biological Engineers. Tampa:NCSA,2005.
[39]权龙哲,张景禹,姜 伟,等. 基于玉米根系保护的株间除草机器人系统设计与试验[J]. 农业机械学报,2021,52(12):115-123.
[40]胡 炼,罗锡文,张智刚,等. 株间除草装置横向偏移量识别与作物行跟踪控制[J]. 农业工程学报,2013,29(14):8-14.
[41]Chen L,Kaewkorn S,He L,et al. Design and evaluation of a levelling system for a weeding robot[J]. IFAC,2016,49(16):299-304.
[42]王树才. 农业机器人的应用领域、特点及支撑技术[J]. 华中农业大学学报,2005,24(增刊1):86-90.
[43]Nφrremark M,Griepentrog H W,Nielsen J,et al. The development and assessment of the accuracy of an autonomous GPS-based system for intra-row mechanical weed control in row crops[J]. Biosystems Engineering,2008,101(4):396-410.
[44]Kim J,Song Y,Kim D W,et al. Enhancing yield and nutritive value of forage for livestock feeding through corn soybean intercropping strategy with several pre-sowing soybean seed coatings[J]. Journal of the Korean Society of Grassland and Forage Science,2017,37(1):50-55.
[45]Tillett N D,Hague T,Miles S J. Inter-row vision guidance for mechanical weed control in sugar beet[J]. Computers and Electronics in Agriculture,2002,33(3):163-177.
[46]王海江. 农业机械智能化设计技术发展现状与展望[J]. 当代农机,2021(4):49-50.
[47]易中懿,胡志超. 农业机器人概况与发展[J]. 江苏农业科学,2010,38(2):390-393.
[48]Jφrgensen R,Srensen C,Maagaard J,et al. HortiBot:a system design of a robotic tool carrier for high-tech plant nursing[J/OL]. Agricultural Engineering International. (2007-07-01)[2023-12-19].https://cigrjournal.org/index.php/Ejounral/article/view/937/931.
[49]Lottes P,Hφrferlin M,Sander S,et al. Effective vision-based classification for separating sugar beets and weeds for precision farming[J]. Journal of Field Robotics,2017,34(6):1160-1178.
[50]Amer G,Mudassir S M M,Malik M A. Design and operation of Wi-Fi agribot integrated system[C]//2015 International Conference on Industrial Instrumentation and Control. Pune:IEEE,2015:207-212.
[51]Korea Triaxle Co Ltd. Autonomous driving system of weed removal robot:KR102389379B1[P]. 2022-04-22.
[52]Quan L Z,Jiang W,Li H L,et al. Intelligent intra-row robotic weeding system combining deep learning technology with a targeted weeding mode[J]. Biosystems Engineering,2022,216:13-31.
[53]夏 欢. 水田用除草机器人的结构与实现[D]. 广州:华南理工大学,2012.
[54]王玉阳,陈亚鹏. 植物根系吸水模型研究进展[J]. 草业学报,2017,26(3):214-225.
[55]Richard D,Leimbrock-Rosch L,Keвler S,et al. Impact of different mechanical weed control methods on weed communities in [JP2]organic soybean cultivation in Luxembourg[J]. Organic Agriculture,[JP+1]2020,10(1):79-92.
[56]潘亚清. 我国农田化学除草现状及综合防治的研究[J]. 农机化研究,2006,28(6):42-43.
[57]Mulder T A,Doll J D. Integrating reduced herbicide use with mechanical weeding in corn (Zea mays)[J]. Weed Technology,1993,7(2):382-389.
[58]Donald W W,Kitchen N R,Sudduth K A. Between-row mowing+banded herbicide to control annual weeds and reduce herbicide use in no-till soybean(Glycine max) and corn(Zea mays)[J]. Weed Technology,2001,15(3):576-584.
[59]方会敏,牛萌萌,薛新宇,等. 玉米田间机械-化学协同除草的杂草防除效果[J]. 农业工程学报,2022,38(6):44-51.
[60]Jacquet F,Delame N,Vita J L,et al. The micro-economic impacts of a ban on glyphosate and its replacement with mechanical weeding in French vineyards[J]. Crop Protection,2021,150:105778.
[61]Pradel M,de Fays M,Seguineau C. Comparative life cycle assessment of intra-row and inter-row weeding practices using autonomous robot systems in French vineyards[J]. Science of the Total Environment,2022,838:156441.
基金項目:江苏省农业科技自主创新资金[编号:CX(22)3098];江苏省现代农机装备与技术示范推广项目(编号:NJ2022-07);扬州大学高端人才支持计划。
作者简介:唐子昊(2000—),男,江苏淮安人,硕士研究生,主要从事农业工程与信息技术研究。E-mail:tangzihao0517@163.com。
通信作者:奚小波,博士,副教授,主要从事农业工程与装备研究。E-mail:xxbctg@126.com。
猜你喜欢
当代工人(2020年8期)2020-05-25
四川农业与农机(2019年4期)2019-08-29
小溪流(画刊)(2017年12期)2018-01-10
中国市场(2016年35期)2016-10-19
工业设计(2016年7期)2016-05-04
工业设计(2016年4期)2016-05-04
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
河南科技(2014年1期)2014-02-27
