基于终端滑模的六旋翼无人机有限时间鲁棒控制
2023-05-08 03:02李涛
计算机应用与软件 2023年4期
李 涛
(郑州旅游职业学院信息工程学院 河南 郑州 451464)
0 引 言
六旋翼无人机作为一种小型飞行器,具有结构简单、任务效率高和可靠性强等优点,在农业、军事和航拍等领域得到了广泛的应用[1-3]。六旋翼无人机完全依赖飞行控制系统实现稳定自主飞行,控制系统的控制效果决定着无人机的飞行性能。当前针对飞行控制系统的研究主要建立在无人机数学模型的基础上,但是建立的数学模型与实际情况存在着一定的偏差,因此在设计控制系统时必须考虑外部动态的影响[4-5]。由于六旋翼无人机的质量较小,大气中的不稳定气流会在一定程度上影响运动和姿态的稳定,降低六旋翼的飞行性能[6-9]。
文献[10]针对四旋翼无人机鲁棒自适应飞行问题,设计了指数收敛干扰观测器来估计和补偿未知干扰,提出了一种鲁棒控制方法,能够确保四旋翼UAV安全稳定飞行;文献[11]针对飞行环境不断变化的四旋翼无人机轨迹跟踪问题,提出了一种基于区间矩阵的鲁棒跟踪控制策略,但对控制系统的稳定条件比较严格;文献[12]针对带有参数不确定性和外界干扰的四旋翼无人机,利用Super-twisting算法设计了滑模干扰观测器对外部扰动进行观测和补偿,提出了一种鲁棒控制方法,但是不能准确估计不确定参数;文献[13]针对带有内外扰动、线速度未知等不确定性影响的四旋翼无人机轨迹追踪问题,通过引入扩张状态观测器对系统不确定因素进行实时估计并给予补偿,提出一种基于扩张状态观测器的鲁棒滑模控制方法,仿真实验验证了该方法的有效性。为此,本文利用终端滑模自适应律和模糊系统来估计和补偿复合干扰,设计终端滑模鲁棒控制方法,最终实现六旋翼无人机的有限时间全局渐进稳定。
1 模型描述
六旋翼无人机的结构示意图如图1所示。
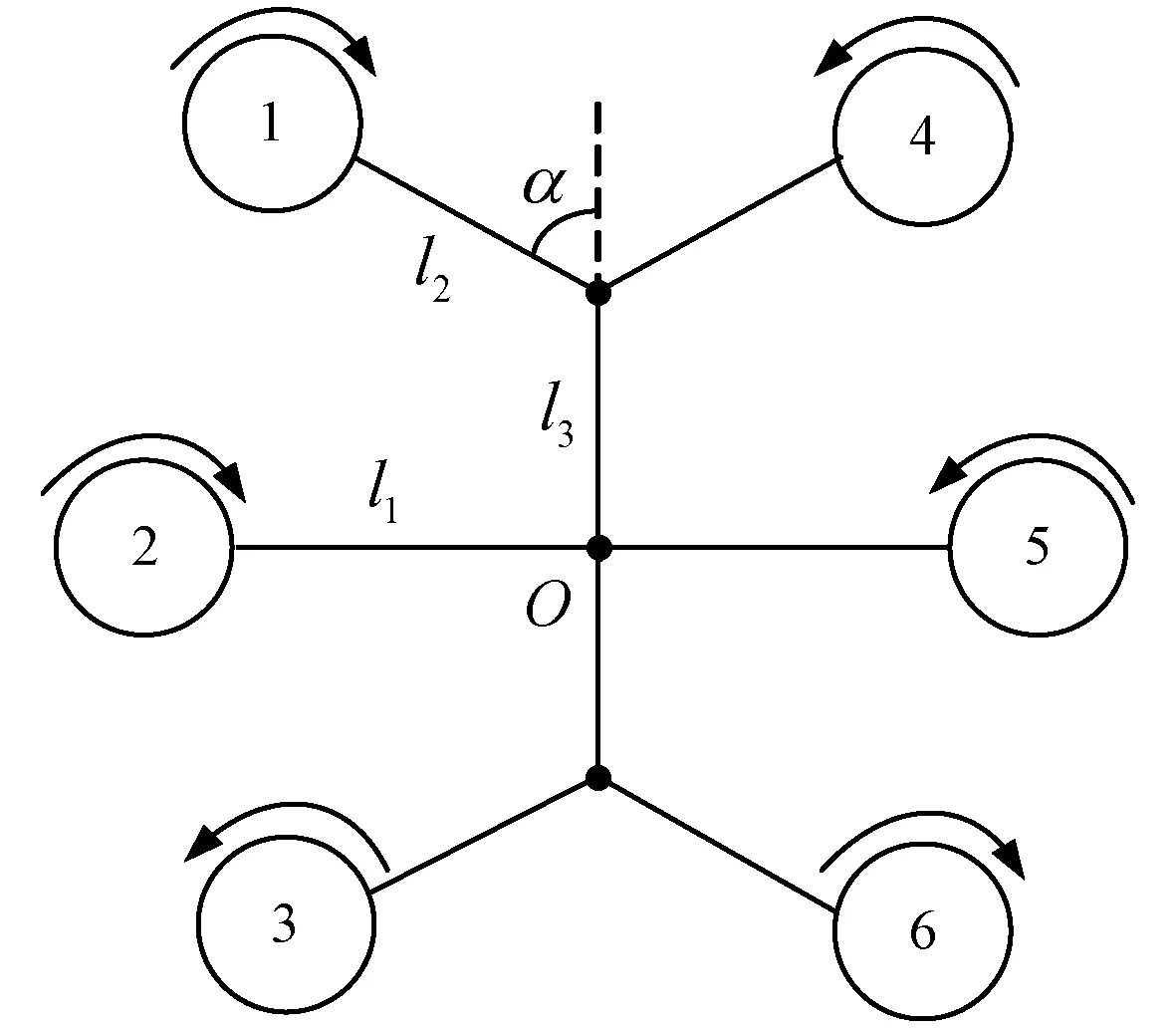
图1 六旋翼结构
六旋翼无人机的运动模型[14-15]可以描述为:
(1)
式中:χ=[x,y,z]T表示UAV的位置坐标;ν=[νx,νy,νz]T表示UAV的速度;g是重力加速度;e=[0,0,1]T;dν表示UAV运动模型中的模型误差和外界干扰等复合干扰。F=[Fx,Fy,Fz]T表达式为:
(2)

六旋翼无人机的姿态模型可以描述为:
(3)
式中:η=[φ,θ,ψ]T;ω=[p,q,r]T表示横滚、俯仰和航向角速度;J=diag{Jx,Jy,Jz}表示转动惯量;f=-J-1(ω×Jω);τ=[τφ,τθ,τψ]T表示旋翼气动力矩;dω表示UAV姿态模型中的复合干扰;R是UAV的系数矩阵。R表达式为:

(4)
本文的控制目标是六旋翼无人机的运动模型和姿态模型,设计终端滑模鲁棒控制律,使UAV的位置和姿态误差在有限时间内收敛到0。由文献[16]可以得到以下引理:

(5)
2 终端滑模鲁棒控制律设计
针对六旋翼无人机的运动模型和姿态模型设计基于终端滑模的鲁棒控制律,控制系统结构如图2所示。

图2 控制系统结构
2.1 运动模型鲁棒控制律设计
定义六旋翼无人机的位置误差为:
(6)

(7)
针对六旋翼无人机的运动模型,设计如下终端滑模面,来改善控制性能:
(8)
基于式(8),设计运动回路的鲁棒控制律如下:
(9)

(10)
式中:γ1>0。考虑如下Lyapunov函数:
(11)
(12)
将式(9)和式(10)代入式(12),化简可得:
(13)
由于双曲正切函数满足下列性质:
(14)
则可以得到:
(15)
将式(15)代入式(13)可以得到:
(16)
式中:k1min是矩阵k1元素的最小值。进一步化简得:
(17)
式中:β=(p/q+1)/2。
2.2 姿态指令解算
由式(2)可得,六旋翼无人机的6个旋翼转动产生的合力T为:
(18)
进一步可以解算得到,UAV的横滚角指令φd和俯仰角指令θd为:
(19)
式中:ψc是输入的航向角指令,则ηd=[φd,θd,ψd]T为姿态指令。
2.3 姿态鲁棒控制律
定义姿态误差为:
(20)

(21)
针对UAV的姿态模型,设计如下终端滑模面:
(22)

下面利用终端滑模模糊系统在线逼近复合干扰dω,则可以得到:
(23)

(24)
式中:γ2>0,a2>0。在式(22)、式(23)和式(24)的基础上,设计UAV姿态模型的鲁棒控制律为:
(25)
式中:k2是正定对角矩阵。
六旋翼无人机的合力T、气动力矩τ=[τφ,τθ,τψ]T与旋翼转速满足下列关系:
(26)
式中:a是六旋翼无人机的反扭矩系数;α、l1、l2和l3的具体物理意义如图1所示;M为六旋翼无人机的控制分配矩阵。则进一步可以得到:
(27)
式中:M*表示矩阵M的伪逆矩阵。
2.4 稳定性证明
定理1针对提出的六旋翼无人机数学模型,设计式(8)和式(22),并提出式(9)、式(25)、式(10)、式(24),能够确保六旋翼无人机的位置和姿态误差在有限时间内收敛到0,保证UAV全局渐进稳定。
证明:考虑如下Lyapunov函数:
(28)

(29)
将式(25)以及式(24)代入并化简得:
(30)
式中:k2min是矩阵k2的最小元素。由于双曲正切函数满足下列性质:
(31)
则可以得到:
(32)
将式(17)和式(34)代入式(32),可得到:
-nVβ
(33)
式中:n的表达式为:
(34)

(35)
3 仿真实验与结果分析
为了验证本文所设计的终端滑模鲁棒控制方法的有效性,采用MATLAB进行仿真验证,并与文献[17]所设计的传统滑模控制方法进行对比。
3.1 实验参数
六旋翼无人机的机体结构参数如表1所示。

表1 机体结构参数
整个仿真时长设置为20 s,六旋翼无人机的初始状态为:
χ0=[0,0,0]T;ν0=[0,0,0]T
η0=[0,0,0]T;ω0=[0,0,0]T
设定六旋翼无人机的指令信号为:
χd=[(e0.5t+sint)m,(1.2t+cost)m,
(e0.12t-sin1.5t)m]T
ψd=(0.6t-sin1.2t)
设定复合干扰为:
dν=[ln(t+1)+0.2sint,ln(t+2)-0.3sint,
ln(t+0.1)-0.1sint]T
dω=[ln(1+2t)+e0.1t,e0.12t-ln(1+t),ln(0.1+st)]T
终端滑模鲁棒控制律参数如表2所示。

表2 终端滑模鲁棒控制律参数
3.2 运动模型对比仿真
六旋翼无人机的位置仿真结果如图3-图5所示。其中:实线代表指令信号;短虚线代表文献[17]的仿真结果;长虚线代表本文方法仿真结果。

(a) x跟踪曲线

(b) ex曲线图3 位置x跟踪曲线

(a) y跟踪曲线

(b) ey曲线图4 位置y跟踪曲线
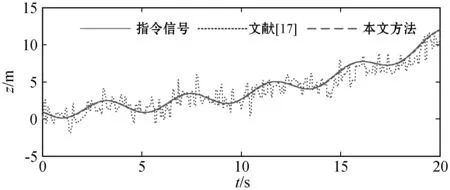
(a) z跟踪曲线
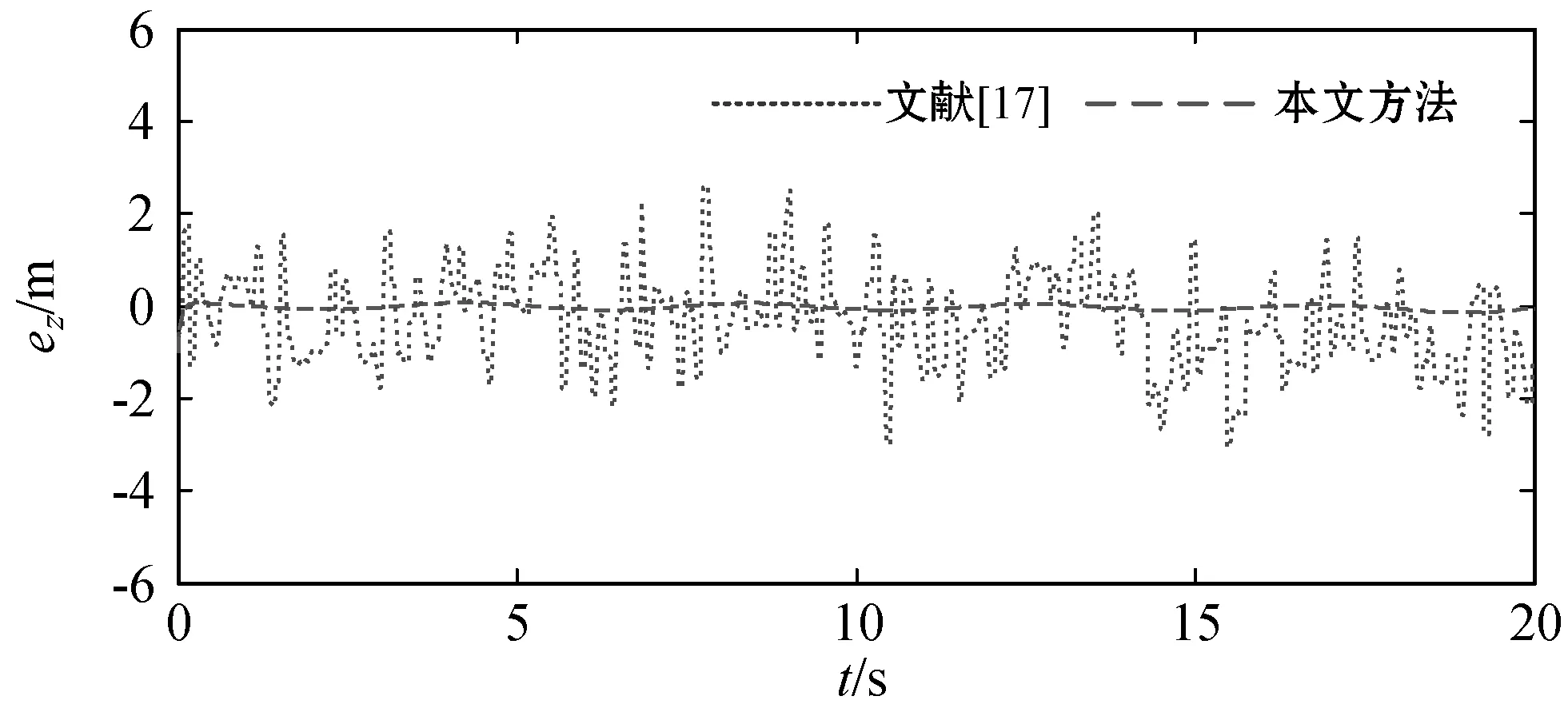
(b) ez曲线图5 位置z跟踪曲线
从仿真结果图可知:采用文献[17]中的传统滑模控制方法能使UAV的坐标x、y和z基本跟踪指令信号,但是在复合扰动的影响下,跟踪曲线会在指令信号附近大幅剧烈振荡,跟踪误差达到了3 m;而在本文设计的基于终端滑模的六旋翼无人机有限时间鲁棒控制方法的作用下,六旋翼无人机的位置x、y和z可以在0.1 s内稳定跟踪指令信号,有效补偿复合干扰的影响,最大跟踪误差仅为0.1 m。
六旋翼无人机运动模型的复合干扰仿真结果如图6所示。
从仿真结果图可知:所设计的自适应律能够在0.1 s内准确估计运动模型复合干扰,估计误差最大仅为0.2 m/s,快速性和准确性均较好。
3.3 姿态模型对比仿真
六旋翼无人机的姿态仿真结果如图6-图9所示。
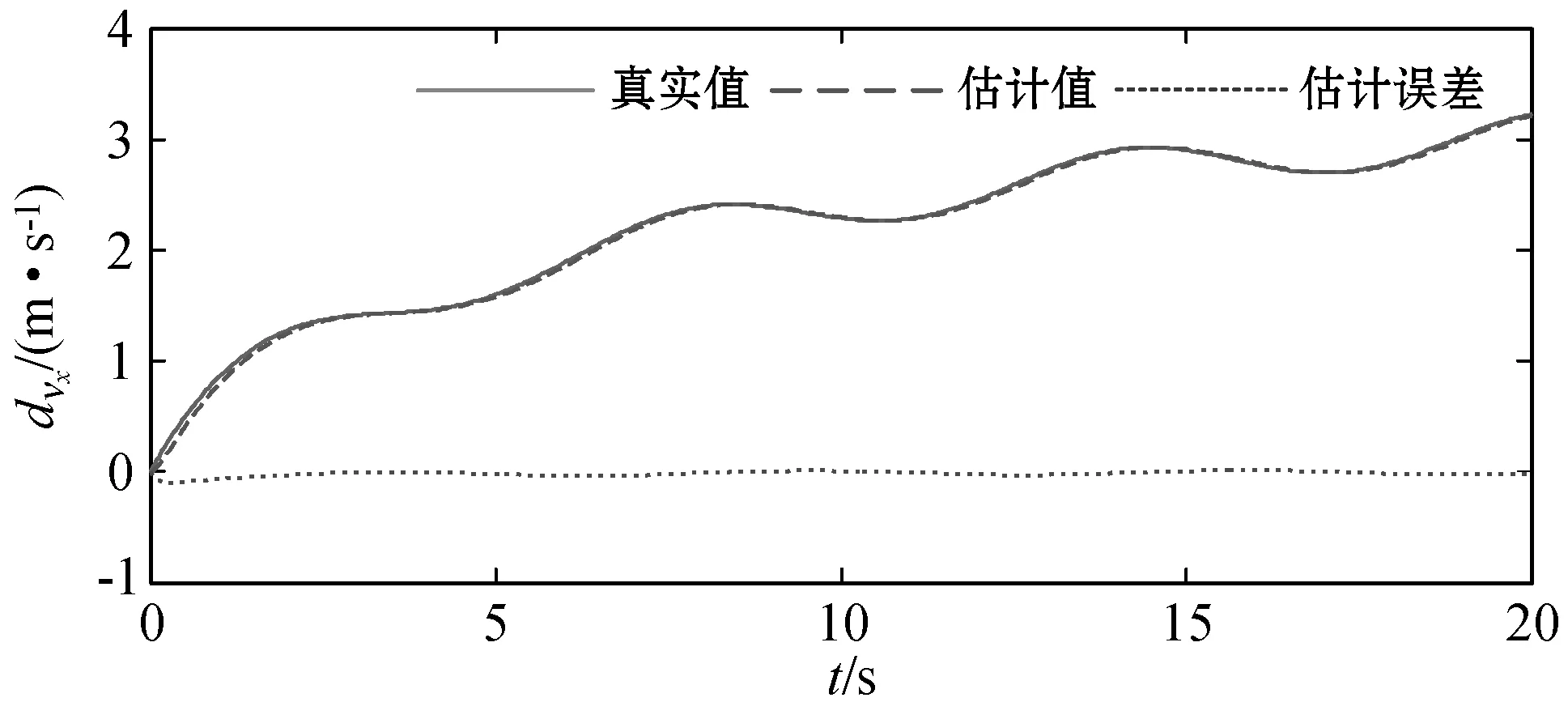
(a) dνx仿真曲线

(b) dνy仿真曲线
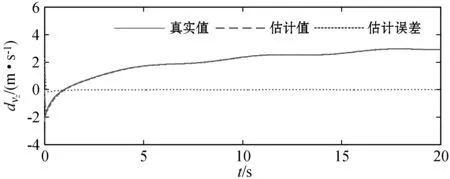
(c) dνz仿真曲线图6 运动模型扰动估计曲线
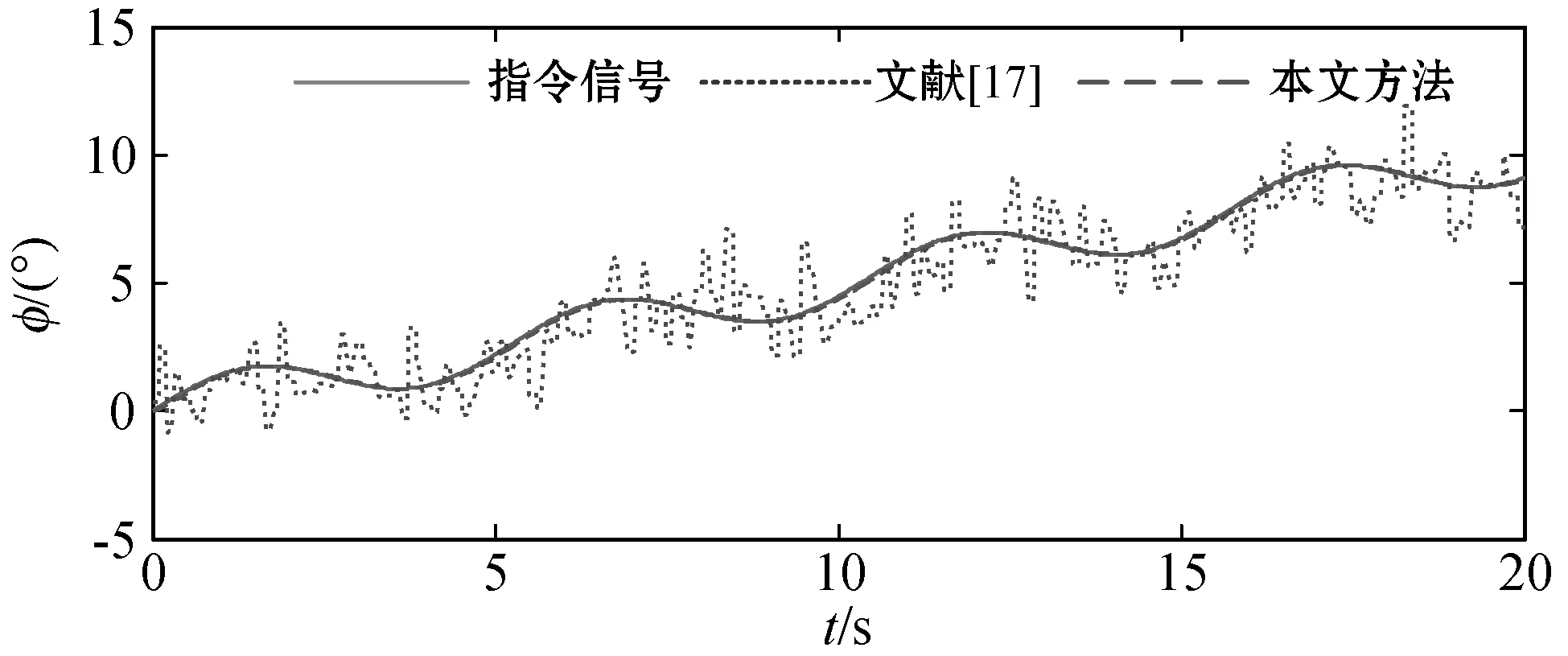
(a) φ仿真曲线

(b) eφ仿真曲线图7 横滚角φ仿真结果
(a) θ仿真曲线

(b) eθ仿真曲线图8 俯仰角θ仿真结果

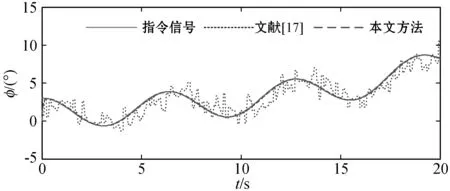
(a) ψ仿真曲线
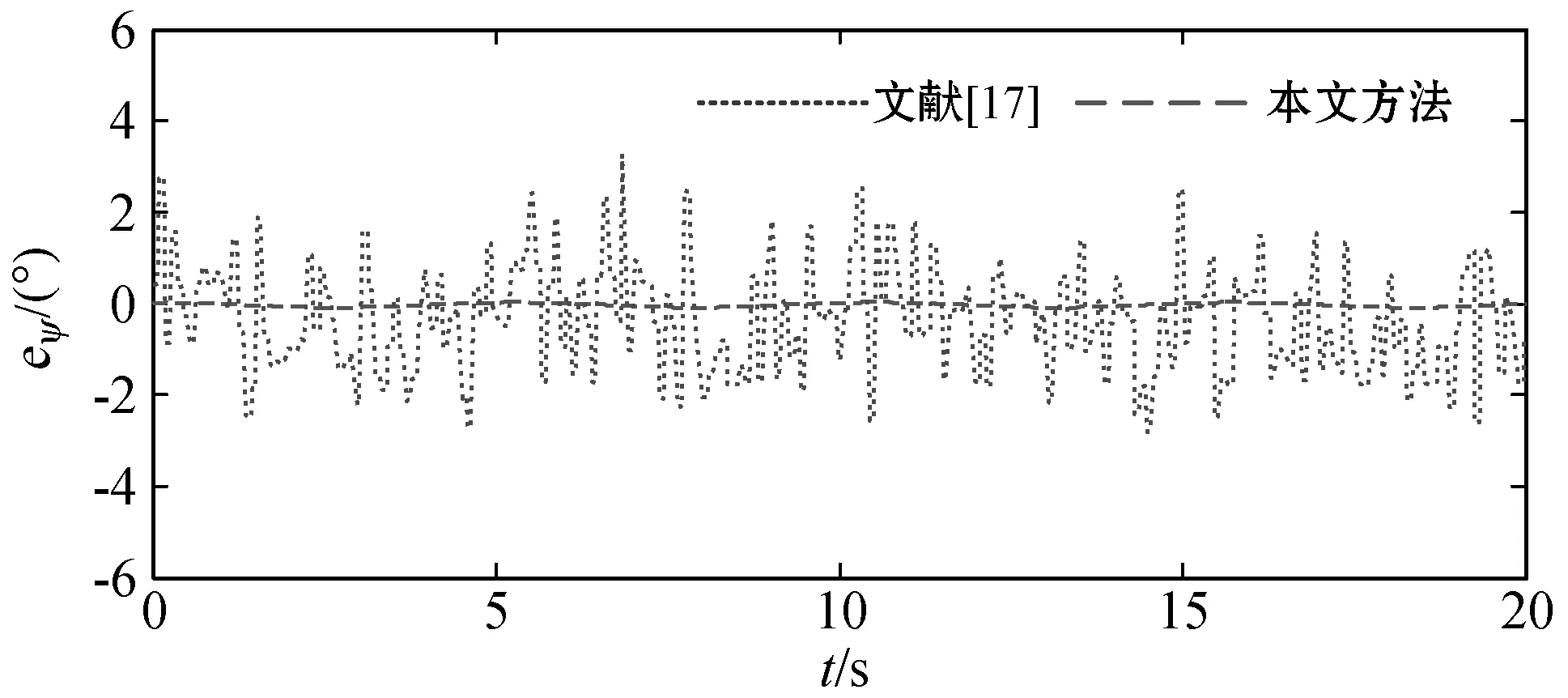
(b) eψ仿真曲线图9 航向角ψ仿真结果
从仿真图可知:采用文献[17]的滑模控制方法,可使六旋翼无人机的姿态角φ、θ和ψ能够基本跟踪指令信号,但是在复合干扰的影响下,跟踪曲线会在指令信号附近大幅剧烈振荡,跟踪误差达到了4°;而在本文设计的基于终端滑模的六旋翼无人机有限时间鲁棒控制方法的作用下,姿态角φ、θ和ψ能够在0.1 s内稳定跟踪指令信号,并且在有效复合干扰的影响下,最大跟踪误差也仅为0.3°。
六旋翼无人机姿态模型的复合干扰仿真结果如图10所示。

(a) dp仿真曲线

(b) dq仿真曲线
从仿真图可知:本文设计的模糊系统能够在0.1 s内准确估计姿态模型复合干扰,最大估计误差仅为0.2 (°)/s2,快速性和准确性也均较好。
4 结 语
针对六旋翼无人机的运动和姿态控制精度问题,设计一种终端滑模鲁棒控制方法,根据MATLAB对比仿真实验表明:
(1) 设计的终端滑模鲁棒控制方法能够确保六旋无人机在0.1 s内稳定、准确跟踪指令信号,位置和姿态的最大跟踪误差分别为0.1 m和0.3°,具有很好的快速性和准确性。
(2) 设计的终端滑模自适应律能够有效补偿运动模型复合干扰的影响,最大估计误差为0.2 m/s,有效提高了控制方法的鲁棒性。
(3) 设计的终端滑模模糊系统能够有效补偿姿态模型复合干扰的影响,最大估计误差仅为0.2 (°)/s2,有效提高了控制方法的鲁棒性。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
自动化学报(2019年6期)2019-07-23
电子制作(2019年9期)2019-05-30
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
厦门理工学院学报(2016年1期)2016-12-01
北京航空航天大学学报(2016年8期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16