
新能源汽车动力电池荷电状态估计
2023-05-06 18:51:30纵瑞州李帅胡韦涛谭耀耀丁重庆
无线互联科技 2023年24期
纵瑞州 李帅 胡韦涛 谭耀耀 丁重庆

摘要:准确估计新能源汽车动力电池的荷电状态可以为驾驶者提供准确的剩余续航里程信息。因此,动力电池的荷电状态估计是新能源汽车关键技术之一。目前,常用的估计算法都有一定的局限性,文章提出建立动力电池的分数阶模型,先进行参数识别,然后采用扩展卡尔曼滤波进行动力电池的荷电状态估计,以满足不同的应用场景需要。为了验证该算法的实际效果,本研究模拟出不同工况下的荷电状态估计结果和开路电路的估计结果,与传统安时法结果对照表明,扩展卡尔曼算法具有更好的准确性和可靠性。
关键词:荷电状态;分数阶;扩展卡尔曼滤波
中图分类号:TM912 文献标志码: A
基金项目:大学生创新创业项目省级创新创业项目;项目编号:S202210959072。大学生创新创业项目国家级创新创业项目;项目编号:202310959018。大学生创新创业项目校级创业项目;项目编号:X202210959097。
作者简介:纵瑞州(2002—),男,安徽宿州人,本科生;研究方向:新能源技术应用。
0 引言
随着全球能源危机和环境问题的日益加剧,新能源汽车成为解决传统燃油汽车排放和能源依赖问题的方案。而新能源汽车的核心技术之一就是动力电池。准确估计动力电池荷电状态,可以帮助优化能源管理策略,提高能源利用效率[1]。过高或过低的荷电状态都会对电池造成损害,影响其循环寿命和容量保持率,所以荷电状态估计的准确性对于延长电池使用寿命至关重要[2]。然而,动力电池荷电状态的准确估计一直是新能源汽车领域的关键问题之一。
荷电状态(State of Charge, SOC)表示电池的电能水平,反映了电池的最大功率和最小功率。现在研究蓄电池SOC估算的方法有:安时积分法、开路电压法和卡尔曼滤波算法等。其中,安时积分法简单,容易实现,但误差会逐渐积累,受电流测量精度影响大。开路电压法不能在线测量,必须将电池离线静放,不能动态地测量电池的SOC。本文采用二阶RC等效电路模型,给出离散化方程,结合安时积分法,运用扩展卡尔曼滤波算法动态估算电池组的荷电状态,并通过MATLAB软件进行仿真验证。结果证明了该算法的有效性。
1 电池建模和参数辨识
1.1 电池建模
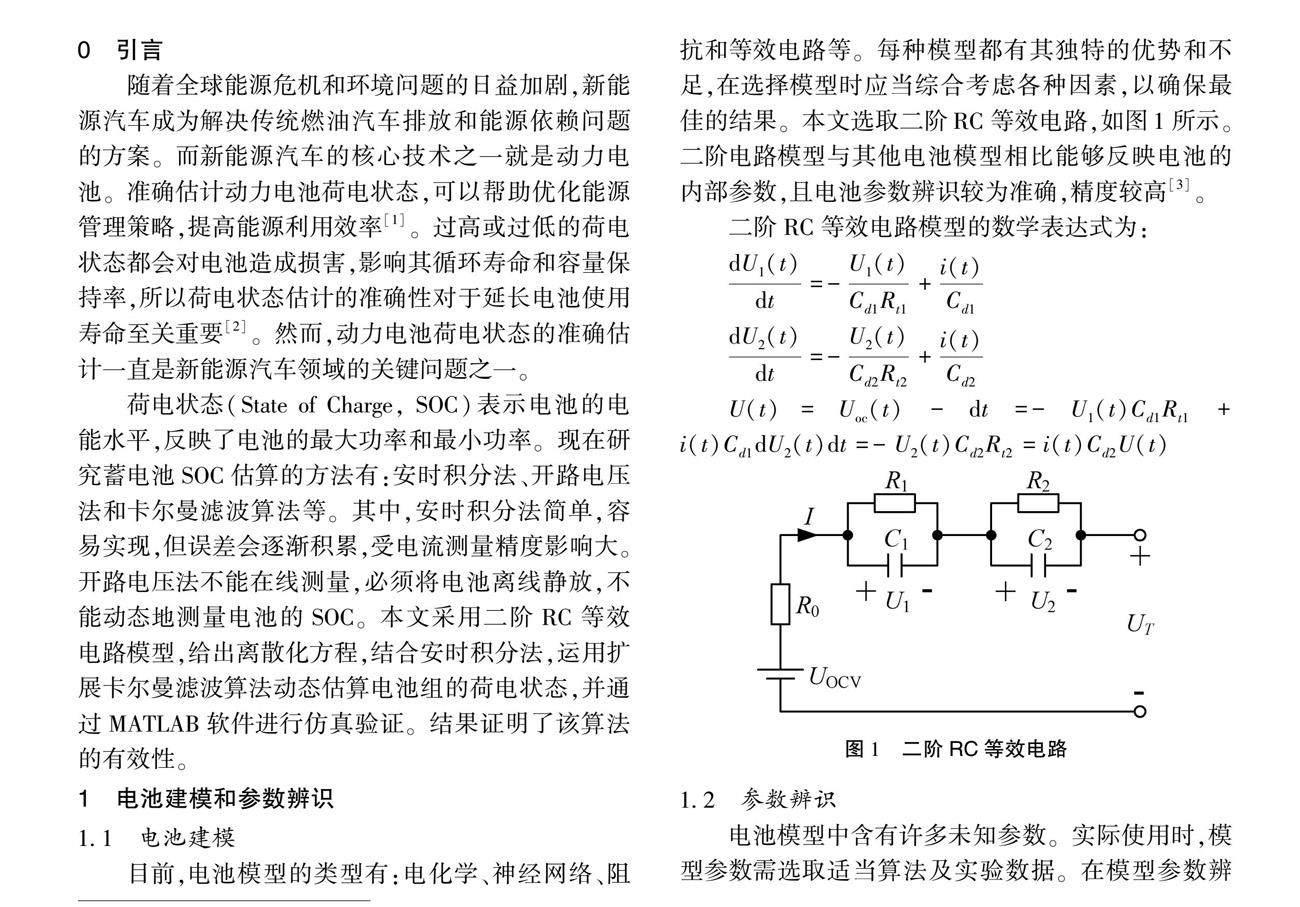
目前,电池模型的类型有:电化学、神经网络、阻抗和等效电路等。每种模型都有其独特的优势和不足,在选择模型时应当综合考虑各种因素,以确保最佳的结果。本文选取二阶RC等效电路,如图1所示。二阶电路模型与其他电池模型相比能够反映电池的内部参数,且电池参数辨识较为准确,精度较高[3]。
二阶RC等效电路模型的数学表达式为:
dU1(t)dt=-U1(t)Cd1Rt1+i(t)Cd1
dU2(t)dt=-U2(t)Cd2Rt2+i(t)Cd2
U(t)=Uoc(t)-dt=-U1(t)Cd1Rt1+i(t)Cd1dU2(t)dt=-U2(t)Cd2Rt2=i(t)Cd2U(t)
1.2 参数辨识
电池模型中含有许多未知参数。实际使用时,模型参数需选取适当算法及实验数据。在模型参数辨识及优化方面,以实测电池端电压误差最小及模型仿真为参数辨识评价标准。
参数辨识过程可按照如下步骤进行[4]。
(1)通过双线性变换法,能够把复频域的数据转换为Z域的数据,并使用幂级数展开法进行逆Z变换,从而获取一个精确的、易于理解的锂电池模型。
(2)通过对锂电池开路电压的静态和动态测试,获得一条可靠的OCV-SOC 曲线,以确保其准确性。
(3)通过开发先进的算法来识别模型参数,并利用仿真和实验结果来评估模型的准确性和参数优化。
2 卡尔曼滤波算法
卡尔曼滤波是一种有效的线性系统状态方程和自回归模型。线性系统状态方程能够抑制噪声和干扰,从而使系统状态得到最佳估计,提高系统的性能。自回归模型能够有效地将带有外部变量的自回归滑动平均系统或体系转换为一种有理传递函数,从而使得计算变得更加简单、高效。
卡尔曼滤波算法标准预测方程:
X-k^=Akxk-1^+Bkuk(1)
其中,Ak为转移矩阵,用来描述一个人在当前时刻的行为,可以用来预測前一个人的行为;Bk为控制矩阵,用来描述一个人在当前时刻的行为,可以用来衡量一个人的行为是否符合要求;xk-1^为对x的一个估计;X-k^ 为基于前一个时刻的行为来计算出的 x的估计值。
当获得x估计之后,须经观测加以修正以获得最优估计。利用状态预测方程对当前的状态x进行预测,但是该预测含有噪声。噪声愈大,预测的不确定性愈高。这时P协方差矩阵的定义是必要的。
当前状态协方差计算公式为:
P-k=APk-1AT+Q(2)
卡尔曼滤波算法通过将协方差矩阵P与状态转移矩阵A以及它们之间的转置AT相乘,来计算当前状态的协方差。系统协方差矩阵Q则用于描述预测模型产生的噪声。
观测值:
Zk=HXk+V(3)
其中,H为观测矩阵;V为观测噪声,其协方差矩阵由R 来表示。
通过综合分析观测数据和预测数据,可以得出当前状况的最佳评估值:
Xk^=X-k^+Kk(Zk-Hx-k^)(4)
其中,Zk-Hx-k^为实际观测值与预期观测值之间的差异,将这个差异乘上卡尔曼系数K,就可以得到 Xk的准确值。
矩阵卡尔曼滤波K定义方程如下:
Kk=P-kHT(HP-kHT+R)-1(5)
K的主要功能在于:一方面能够帮助评估一个预测模型的准确程度;另一方面也能帮助确定哪个模型更加可靠。在这种情况下,如果一个预测模型的准确程度更高,那么其残差就会更少;而如果准确程度不够,那么残差就会更多。其次,利用K,可以把残差表达式由观测域转换为状态域,使得x可在不同的维度上同时修正并获得最佳估计[5]。
此外,需更新当前状态的协方差。
Pk=(I-KkH)P-k(6)
当系统处于k+1状态时,Pk将被映射到式(2)中的Pk-1,从而使得算法能够不断地重复迭代,以获得最佳的估计结果。
扩展卡尔曼滤波算法是在卡尔曼滤波算法的基础上进行改良,便于计算非线性的动态方程,其计算过程类似。应用安时积分法,当电池SOC的初始状态值为SOC0时,当前状态描述为:
SOC=QQn=SOC0-∫ηItQNdt(7)
其中,Q为电池的最大容量;Qn为标称容量;QN为最大容量;η为充放电效率;It为充放电的总电量。
利用扩展卡尔曼滤波算法估算SOC电池的容量。将预状态估计值与当前时刻观测值相结合,通过递推运算获得当前时刻估计值并采用递推方法求解离散数据线性滤波。
电池模型的状态方程:
Xk+1=AkXk+BkUk+Wk
Yk+1=CkXk+DkUk+Hk(8)
3 实验仿真
本文将7 600 AH磷酸铁锂电池作为实例,利用MATLAB软件构建仿真模型,并通过FUDS和DST 2种工况来检验这一算法的实用性。由于实际中SOC并不准确,因此将其设置为0.8。
对比结果如图3所示,从图3中可以看出,改进型卡尔曼滤波算法估计的SOC曲线在2种工况下都比较接近于真实曲线。通过对实验数据的计算,得出在DST工况下SOC估计MAE(平均绝对误差)为0.025 5,SOC估计RMSE(均方根误差)为0.036 0。
在FUDS工况下SOC估计MAE为0.043 6,RMSE为0.052 7,通过2个误差计算可以判断出,本文提出的算法在SOC估计上与真实值很接近。在DST工况下,电压估计平均绝对误差为0.025 9,电压估计均方根误差为0.051 1。在FUDS工况下,电压估计平均绝对误差和均方根误差分别为0.037 7和0.051 7。通过仿真数据,得出改进型卡尔曼滤波估算的SOC能够有效地克服传统安时积分法存在的误差积累问题,从而提供更高的精度、更稳定的结果和更快的响应时间,误差更小,具有实用性。
4 结语
本文對SOC电池的实际工作状态进行了模拟,经过实验验证,改进卡尔曼滤波算法能够在2种蓄电池工况下快速收敛至真实值,并对初始值进行校正。SOC动态估计时,采用安时积分法能不断校正累积误差得到更高精度。这种算法具有良好的准确性和可靠性。本文电池模型建立时未考虑电池使用寿命和自身放电因素,电池自放电与很多因素有关,对本文实验有一些的影响。
参考文献
[1]魏传斌.基于神经网络的电动汽车动力电池荷电状态估算研究[D].天津:天津职业技术师范大学,2023.
[2]焦萌.基于神经网络的锂电池SOC估计[D].青岛:青岛大学,2023.
[3]王维强,何源,孙永强,等.基于变,阶RC网络的锂离子电池等效电路模型[J].中国科技论文,2021(6):668-674.
[4]李泉.锂离子动力电池管理系统关键技术研究[D].长沙:湖南大学,2018.
[5]王君瑞,单祥,贾思宁,等.基于扩展卡尔曼滤波的蓄电池组SOC估算[J].电源技术,2020(8):1168-1172.
(编辑 王永超编辑)
Estimation of the SOC of the new energy vehicle power battery
Zong Ruizhou, Li Shuai, Hu Weitao, Tan Yaoyao, Ding Chongqing
(School of Electronic and Electrical Engineering, Anhui Sanlian University, Hefei 230601, China)
Abstract: Accurate estimation of the state of charge of the power battery of new energy vehicles can provide the driver with accurate remaining range information, so the estimation of the state of charge of the power battery is one of the key technologies of new energy vehicles. At present, the commonly used estimation algorithms have certain limitations. In this paper, the establishment of a fractional model of power battery is proposed, first to identify the parameters, and then the extended Kalman filter is used to estimate the charge state of power battery to meet different application scenarios. In order to verify the practical effect of the algorithm, the SOC estimation results and the open-circuit estimation results under different working conditions are simulated in this paper, which shows that the extended Kalman algorithm has better accuracy and reliability.
Key words: state of charge; fractional order; extended Kalman filter
