
探测器个数对非视域图像重建结果影响的研究
2023-05-06 21:23:31王雪峰陈兴稣
无线互联科技 2023年24期
关键词:噪声
王雪峰 陈兴稣


摘要:非视域成像技术作为一种新型的成像技术,能够完成对隐藏目标的三维图像重建,在非视域成像实验中,探测器个数的选择对实验成本、复杂程度以及重建结果都有重要影响。文章通过分析不同探测器个数对重建结果质量的影响,确定如何选择探测器个数。分别进行2组实验,采用4种不同个数的探测器阵列(9个、16个、25个和36个),对3个隐藏的目标字母“N”“J”和“U”在2种不同噪声下进行探测,使用滤波反投影算法进行图像重建,并利用PSNR值和SSIM值分析其图像重建结果的质量,分析结果对非视域成像中探测器的设置具有重要的参考意义。
关键词:非视域成像;探测器个数;噪声;隐藏物体
中图分类号:TP391 文献标志码:A
0 引言
基于激光探测技术的非视域成像技术可借助中介反射面(如墙面等),实现绕过遮挡物体对隐蔽目标进行观察并成像,这一成像技术与传统的光学成像技术不同,开启了新的成像技术通道,可应用于代战争、反恐、灾害救援、医疗和城市交通等场景中,解决了传统光学技术难以对一些隐藏目标成像的问题。
非视域成像技术还处于起步阶段,大多数研究还停留在实验室阶段,其实验设置、重建算法等还有待完善。早期的实验设置主要采用超快激光成像方法[1-4],激光需要进行场景扫描,耗时较大,本文采用多个APD探测器进行探测[5-6],减少扫描时间,分析探测器个数对重建结果的影响;重建算法采用滤波反投影重建算法[7-9],针对不同的隐藏目标,在不同的噪声情况下,分析不同探测器个数对非视域图像重建结果质量的影响。
1 基于滤波反投影的非视域重建算法
非视域的成像过程是根据光经过物体的多次散射,利用探测器接收隐藏目标的间接信息,其实是隐藏目标的信息以一种方式投影到探测器上,这个过程就是投影的过程。非视域成像过程与传统CT投影过程相似[10-11],传统 CT 投影的原理是从高维空间信息投影到低维空间,例如二维图像的投影是投影到一维空间上。非视域的数据获取过程也是从高维空间(三维)信息投影到低维空间信息(一维或二维)。因此非视域成像根据反投影原理进行图像重建,经典的方法就是采用滤波反投影算法。
传统的 CT 反投影方式是将每条射线上的投影值均匀地回抹到重建空间信息上,不同方向上的射线反投影值会相交叠加,由于投影值的不同,反投影得到的图像就会在原图像有内容的区域形成较强烈的叠加。基于 APD 阵列数据的非视域成像的反投影过程是各个椭圆路径上信息反投到三维空间中,也称这个过程为椭圆定位信息的过程。隐藏目标信息点的定位过程是多个椭圆路径的叠加过程,隐藏目标点的信息会投影到多个探测器上,那么反投影的过程,就是通过与投影条件相同的反投影时间条件t=r/c。其中,r为椭圆的路径距离;c为光速;t为投影返回的时间。如得到2个时刻t1和t2,就对应2个椭圆和,隐藏目标点就在这2个椭圆路径的交点上,如果有多个探测器,隐藏目标点就在多个椭圆路径的交点上,得到的图像信息点被不断增强。
因此,基于 APD 阵列的非视域成像过程的反投影公式如下[5]:
b(x,y,z)=∫nmA=1IA(t)da,t=(r1+r2)/c
0,otherwise(1)
其中,b(x,y,z)为隐藏目标的反投影重建值;A为探测器;IA(t)为t时刻探测器A接收的强度信息。公式(1)表示对不同的探测器进行求和,当满足条件t=r/c时,通过计算所有探测器中不同时刻t的反投影值,就得到了隐藏目标的三维形状重建。但这个重建结果是模糊的,存在伪影,需要进行滤波,才能去除伪影。非视域成像的滤波函数一般选择R-L滤波或S-L滤波[11]。
(1)R-L滤波器。
滤波器是采用矩形窗截断斜坡滤波器,时域形式表示为:
hR-L(nT)=14T2,n=0
0,n为偶数
-1π2n2T2,n为奇数(2)
其中,n为采样点;T为采样时间间隔。
(2)S-L滤波器。
在R-L滤波器中,使用的是矩形窗截断斜坡滤波器,产生了震荡效应,S-L滤波使用窗函数来缓解震荡效应,时域离散形式为:
hS-L(nT)=-2π2T2(4n2-1)(3)
2 探测器对非视域图像重建质量的影响
本文的实验设置采用透射式成像方式,中界面采用扩散膜,激光照射扩散膜,光源投射过扩散膜并进行散射后到达隐藏目标,隐藏目标设置为3个字母形式“N”“J”和“U”,光经过隐藏目标散射后,最终被探测器接收,探测器以矩阵的方式排布在扩散膜上。重建结果的质量评价为峰值信噪比(Peak Signal to Noise Ratio,PSNR)值和结构相似度(Structural Similarly,SSIM)值。
2.1 噪声为20 dB时
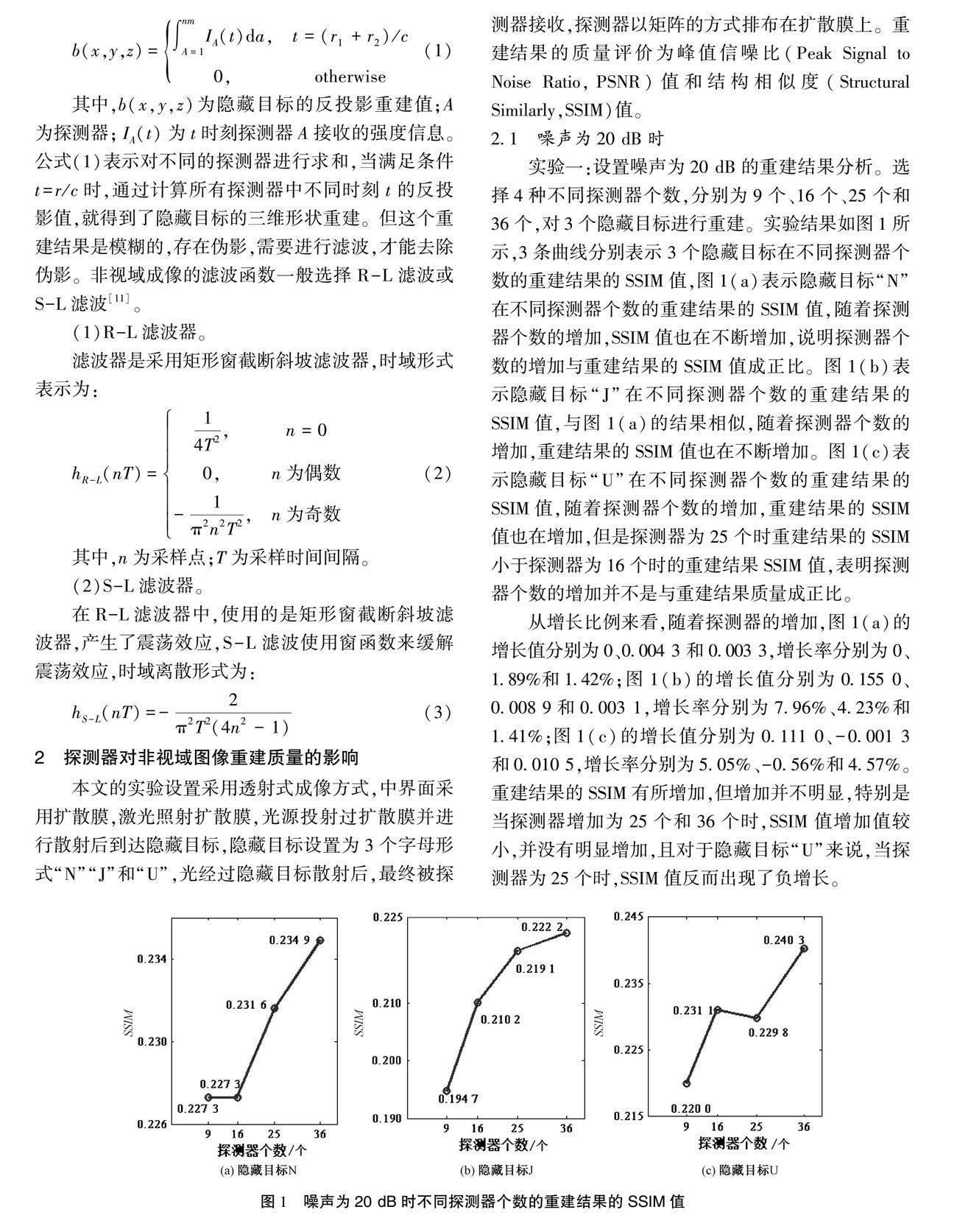
实验一:设置噪声为20 dB的重建结果分析。选择4种不同探测器个数,分别为9个、16个、25个和36个,对3个隐藏目标进行重建。实验结果如图1所示,3条曲线分别表示3个隐藏目标在不同探测器个数的重建结果的SSIM值,图1(a)表示隐藏目标“N”在不同探测器个数的重建结果的SSIM值,随着探测器个数的增加,SSIM值也在不断增加,说明探测器个数的增加与重建结果的SSIM值成正比。图1(b)表示隐藏目标“J”在不同探测器个数的重建结果的SSIM值,与图1(a)的结果相似,随着探测器个数的增加,重建结果的SSIM值也在不断增加。圖1(c)表示隐藏目标“U”在不同探测器个数的重建结果的SSIM值,随着探测器个数的增加,重建结果的SSIM值也在增加,但是探测器为25个时重建结果的SSIM小于探测器为16个时的重建结果SSIM值,表明探测器个数的增加并不是与重建结果质量成正比。
从增长比例来看,随着探测器的增加,图1(a)的增长值分别为0、0.004 3和0.003 3,增长率分别为0、1.89%和1.42%;图1(b)的增长值分别为0.155 0、0.008 9和0.003 1,增长率分别为7.96%、4.23%和1.41%;图1(c)的增长值分别为0.111 0、-0.001 3和0.010 5,增长率分别为5.05%、-0.56%和4.57%。重建结果的SSIM有所增加,但增加并不明显,特别是当探测器增加为25个和36个时,SSIM值增加值较小,并没有明显增加,且对于隐藏目标“U”来说,当探测器为25个时,SSIM值反而出现了负增长。
图1 噪声为20 dB时不同探测器个数的重建结果的SSIM值
如图2所示,显示了使用PSNR值对图像重建质量进行分析,图2中3幅图分别表示隐藏目标“N”“J”和“U”在不同探测器个数的重建结果的PSNR值,其中图2(b)随着探测器个数的增加,重建结果的PSNR基本上是不断增加的,但当探测器个数为25个时,PSNR值较之前略微有所下降;其他2个隐藏目标图2(a)和图2(c)中随着探测器个数的增加,重建结果的PSNR值并没有不断增加,反而出现了不同程度的下降,图2(a)中当探测器为16个时,PSNR值下降了0.132 7;而图2(c)中当探测器增加时,出现了不断下降的趋势,当探测器为9个时,PSNR值最大。说明探测器个数的增加,重建结果的PSNR值并不一定增加。
从PSNR值的变化比率来看,图2(a)的增长值分别为-0.132 7、0.368 6和0.236 9,增长率分别为-1.25、3.38%和2.1%;图2(b)的增长值分别为1.094 4、-0.034 5和0.786 2,增长率分别为10.2%、-0.29%和6.67%;图2(c)的增长值分别为-0.220 9、-0.175 7和0.360 9,增长率分别为-1.92%、-0.1.56%和3.25%。其中图2(b)的PSNR增长率较大,但当探测器从16个增长为25个时,PSNR值出现了负增长;图2(a)中随着探测器个数的增加,PSNR值的增长率较小;图2(c)中一直是负增长,当探测器为9个时PSNR(11.516 7)为最大值,说明随着探测器个数的增加,重建结果图像的质量反而下降了。
图2 噪声20 dB时不同探测器个数的重建结果的PSNR值
因此,当噪声为20 dB时可以得出如下结论:重建结果的误差大小与探测器个数一般成反比,即当探测器个数增加时,重建结果的误差减小;当探测器个数较少时,重建结果的误差也相对较大;但是重建结果误差大小并不是严格与探测器个数成反比,对于不同的探测目标,有时候也可能不变或者变小(见图2(c))。而且当探测器个数增加时,重建结果的误差增加较小,特别是当探测器大于等于16个时。
2.2 噪声为10 dB时
实验二:噪声为10 dB的重建结果分析。实验中选择的探测器个数和隐藏目标与实验一相同。实验结果如图3所示,分析了重建结果的SSIM值变化情况。
图3显示了4种不同个数的探测器下的重建结果的SSIM值对比情况,图中3条曲线从上到下分别是隐藏目标“U”“N”和“J”的重建结果SSIM值,隐藏目标“N”和“J”的重建结果随着探测器个数的增加,其SSIM值也在不断增加;隐藏目标“U”的重建结果SSIM值在探测器为25个时最大,探测器个数继续增加到36个时,其SSIM值反而出现下降。
從SSIM值的增长比例看,对不同的探测器,隐藏目标“J”的增长值分别为0.004 2、0.004 3和0.008 6,增长率分别为2.32%、2.32%和4.55%;隐藏目标“N”的增长值分别为0.002 7、0.007 9和0.004 3,增长率分别为1.36%、3.92%和2.06%;隐藏目标“U”的增长值分别为0.008 1、0.011 8和-0.002 3,增长率分别为4.02%、5.62%和-1.04%;对于不同的探测目标,增长率有所不同,对于隐藏目标“J”当探测器从25个增长到36个时,SSIM值增长率较大;而对于隐藏目标“N”当探测器从16个增长到25个时,SSIM值增长率较大;对于隐藏目标“U”来说,当探测器增加到36个时,SSIM值反而出现了负增长。
图3 噪声10 dB时不同4种探测器个数的重建结果SSIM值
因此,在噪声10 dB的情况下,对于探测器个数的选择,可以得出如下结论:随着探测器个数的增加,重建结果的质量基本呈现增加的趋势。但也不是严格遵循这个趋势,随着探测器个数从9个增加到36个,重建结果的SSIM值增加较小。因此,考虑到实验成本增加和搭建的复杂度,探测器个数一般选择9个或16个就能够达到较好的重建效果。对于较简单的隐藏目标重建,可以选择9个探测器或者更少。
3 结语
本文针对不同探测器个数对非视域图像重建结果质量的分析研究,分别在2种不同噪声情况下(20 dB和10 dB),采用峰值信噪比和结构相似度进行图像质量评价。在非视域成像实验装置中,探测器个数与图像重建误差一般成反比。当探测器个数增加时,能在一定程度上减少图像重建结果的误差。但也不严格遵循这个比例,对于不同的隐藏目标也可能出现负增长的现象。因此,对于探测器的选择需要均衡考虑成本和实验的复杂度,在能够接受的误差范围内,尽量选择较少的探测器个数,以节省成本、降低实验的复杂度、减少后期图像重建的难度和耗时。
参考文献
[1]VELTEN A,WILLWACHER T,GUPTA O,et al.Recovering three-dimensional shape around a corner using ultrafast time-of-flight imaging[J].Nature Communications,2012(1):4705-4710.
[2]VELTEN A,WU D,JARABO A,et al.Femto-photography:capturing and visualizing the propagation of light[J].ACM Transactions on Graphics,2013(4):1-8.
[3]FACCIO D,VELTEN A,WETZSTEIN G.Non-line-of-sight imaging[J].Nature Review Physics,2020(2):318-327.
[4]RAPP J,SAUNDERS C,TACHELLA J,et al.Seeing around corners with edge-resolved transient imaging[J].Nature Communication,2020(11):5929-5938.
[5]XUEFENG W,XINGSU C,YUANQING W.Image reconstruction method of non-line-of-sight objects based on simultaneous algebraic reconstruction technique[J].Applied Laser,2022(3):135-140.
[6]XUEFENG W,ZIHAO Z H,XINGSU C H,et al.Research on 3D objects reconstruction method of none-line-of sight with sparse angle data[J].Laser & Infrared,2022(3):451-457.
[7]XIAOHUA F,LIANG G.Improving non-line-of-sight image reconstruction with weighting factors[J].Opitcs Letters,2020(14):3921-3924.
[8]CHENFEI J,XIAORUI T,MENG T,et al.Research advances on non-line-of-sight three-dimensional imaging lidar[J].Infrared and Laser Engineering,2022(3):258-273.
[9]XUEFENG W,ZIHAO Z H,XINGSU C H,et al.Research on 3D objects reconstruction method of none-line-of sight with sparse angle data[J].Laser & Infrared,2022(3):451-457.
[10]何沅蔚,曾理.低劑量CT图像恢复算法综述[J].中国体视学与图像分析,2020(3):252-260.
[11]蔡玉芳,李屏懿,王珏,等.基于投影视角加权的直线CL重建算法[J].仪器仪表学报,2021(6):64-74.
(编辑 沈 强编辑)
Research on the influence of the number of detectors on the image reconstruction
results of non-line-of-sight imaging
Wang Xuefeng1,2, Chen Xingsu1,2*
(1.School of Network and Information Security, Yili Normal University, Yining 835000, China;
2.Key Laboratory of Intelligent Computing Research and Application,Yili Normal University, Yining 835000, China)
Abstract: As a new imaging technology, non-line-of sight imaging technology can complete 3D image reconstruction of hidden targets. In non-line-of sight imaging experiments, the selection of the number of detectors has an important impact on the experiment cost, complexity and reconstruction results. In this paper, by analyzing the different number of detector on the quality of the reconstruction results, determine how to choose the number of detector. Two groups of experiments were carried out respectively. Four different detectors (9, 16, 25 and 36) were used to detect three hidden target letters “N” “J” and “U” under two different noises, and the filtered back projection algorithm was used to reconstruct the image, the PSNR value and SSIM value were used to analyze the quality of the image reconstruction results. The analysis results have important reference significance for detector setup in non-line-of sight imaging.
Key words: non-line-of sight imaging; numbers of detector; noise; hidden object
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
中老年保健(2022年7期)2022-04-06 13:25:54
数学年刊A辑(中文版)(2020年3期)2020-10-27 02:44:16
中学生数理化·八年级物理人教版(2019年9期)2019-11-25 07:33:08
中学生数理化·八年级物理人教版(2017年9期)2017-12-20 08:11:30
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
船海工程(2015年4期)2016-01-05 15:53:28
海军航空大学学报(2015年4期)2015-02-27 13:45:51
噪声与振动控制(2015年4期)2015-01-01 07:08:05
振动、测试与诊断(2014年4期)2014-03-01 01:14:09
