全息凝视雷达系统技术与发展应用综述
2023-05-05 08:39徐世友陈曾平中山大学深圳电子与通信工程学院深圳518107
雷达学报 2023年2期
郭 瑞 张 月 田 彪 肖 钰 胡 俊 徐世友 陈曾平 (中山大学·深圳电子与通信工程学院 深圳 518107)
1 引言
为了应对不断变化的目标环境、电磁环境和地形环境的挑战,雷达从发明之初到现在不断发展进步,特别是数字化技术在雷达上的应用,为雷达技术的发展打开了广阔空间。近年来,半导体技术的发展推动了高集成度阵列、高性能计算、大带宽数据传输与大容量存储等技术在数字阵列雷达方面的应用,促进了雷达感知探测理论的完善,全息凝视雷达的概念也因此逐渐成型。全息凝视雷达(Holographic staring radar)又称泛探雷达(Ubiquitous Radar)、同时多波束数字波束形成(Digital Beam Forming,DBF)雷达或泛照灯雷达(Floodlight Radar)[1,2],2017年,IEEE雷达定义标准[3]首次给出全息雷达定义,全息雷达是一种同时覆盖全空域、同时多功能的雷达,其特点在于发射采用宽波束,接收采用凝视阵列同时形成多个窄波束覆盖发射区域,每个波束输出包含单独的接收和处理系统用于实现任意波束的同时独立多功能。
本文对全息凝视雷达系统技术与发展应用进行了概述,介绍全息凝视雷达发展历程,并结合系统特点梳理全息凝视雷达应用方向。在此基础上,对全息凝视雷达系统的关键技术进行了概括与分析,并对发展趋势进行了探讨。
2 全息凝视雷达概念与特点
全息凝视雷达概念示意如图1所示,全息凝视雷达采用独立的数字化的收、发阵面,不需要波束扫描。从空间维度来看,全息凝视雷达宽波束发射,能量均匀照射到广阔空域,接收采用数字波束形成技术,同时获得多个窄波束覆盖发射区域实现对整个发射空域的连续探测,从而尽可能多地利用发射信号能量。从时间维度来看,全息凝视雷达采用长时间相参积累,尽可能利用雷达过去发射的信号能量,如此可在相同功率口径积条件下,提高雷达发射功率利用率,改进雷达探测性能和目标信息获取能力[4]。“全息”概念,一方面指雷达获取目标信息的完整性(距离、速度、角度、微多普勒等);另一方面指全时空探测,即对探测区域进行连续时空覆盖。

图1 全息凝视雷达体制概念示意图Fig.1 Schematic diagram of holographic staring radar
全息凝视雷达具有以下优势:
(1) 具有数字化、软件化特点。作为数字阵列雷达的子类,全息凝视雷达收发阵面都采用全数字阵面,雷达收发前端具有组件化、参数化、可编程的特点。雷达功能主要由后端软件化处理机实现,系统功能软件可定义,易于扩展、升级;
(2) 全息凝视雷达具有同时多功能特点。与传统多功能雷达同一时间仅能处理单个任务相比,全息凝视雷达同时形成多个接收波束,每个波束可针对不同目标选择不同驻留时间并单独处理,从而实现多任务并行处理;
(3) 全息凝视雷达能够提高强杂波背景下弱小目标的检测和识别能力。与传统的目标监视雷达相比,全息凝视雷达无需波束扫描,通过长时间积累获得更高的增益和多普勒分辨率,实现了运动目标与杂波的有效分离,且高多普勒分辨率有助于提取目标的微多普勒特征,从而为目标分类识别提供了新的维度;
(4) 全息凝视雷达易于实现集群目标探测。全息凝视雷达可实现全时空覆盖,无需波束扫描和复杂的资源调度,即可实现大批量目标的同时检测跟踪,目标容量大,更新速率高;
(5) 全息凝视雷达可实现目标远距离低截获概率探测。全息凝视雷达采用低功率全向或宽波束发射、全数字多波束凝视接收体制,发射能量分布在宽的方位区域上,接收利用雷达过去发射的信号能量提高目标信息获取能力,同时方便实现低截获波形设计、发射时间、能量与频率控制,使得己方雷达对威胁目标的探测距离大于对方截获接收机对雷达发射信号的侦察截获距离,实现对目标“射频隐身”探测。
与此同时,全息凝视雷达工作特点也会带来以下处理难题:(1)发射增益低。全息凝视雷达宽波束发射不可避免地带来发射增益降低问题,需要通过更多的脉冲积累来获取与波束扫描雷达相当的增益,这就对较长时间范围内回波间的相参性提出了更高的要求,积累时必须考虑目标机动、多普勒模糊、其他扰动以及相位噪声带来的积累增益下降问题;(2)计算量大。接收时多波束同时处理将显著增加系统对信号处理资源的需求;(3)多径效应。复杂环境下宽波束发射更容易带来多径问题,严重时将为目标检测以及参数估计带来十分不利的影响。
全息凝视雷达模式、相控阵雷达模式以及MIMO雷达模式可以看作同一个数字阵列雷达硬件平台的不同工作模式[5,6],它们具有各自不同的特点与适用场景。全息凝视雷达从波束方面进行定义,强调的是宽发和同时多波束凝视接收,而MIMO雷达则是从波形角度,强调的是波形分集,一般同时也具有全息凝视特点。表1总结了数字阵列雷达各工作模式的对比。

表1 相控阵雷达、全息凝视雷达和MIMO雷达对比Tab.1 The comparison of phased array radar,holographic staring radar and MIMO radar
3 全息凝视雷达研究历程与应用情况
全息凝视雷达的历史可追溯至雷达发明之初,世界上第一部军用雷达英国Chain Home雷达即采用“泛光灯照射”(floodlight illumination)工作模式发射电磁波,通过检测目标回波实现空中威胁目标方位和距离探测,并在第二次世界大战中发挥重要作用[1]。然而,在之后的雷达发展过程中,波束扫描雷达由于其在系统结构、实现成本等方面的优势,成为雷达系统发展的主要方向。
直到20世纪80年代,法国国家航空航天研究院(ONERA)与Thomson-CSF提出合成脉冲孔径雷达(Radar a Impulsion et Antenne Synthetique,RIAS)概念[8–10],凝视工作体制再次被提及。为了在保持一定的角度分辨率前提下增加波束驻留时间,RIAS采用“宽发窄收”工作模式,发射波形相互正交,接收利用数字波束形成技术同时获取多个波束以实现半球形范围内所有检测目标的持续跟踪。RIAS工作于VHF频段,一方面是为了对抗隐身目标,另一方面是为了适应当时技术水平,减少阵元数目从而降低系统复杂性和计算能力需求。
1989年,为应对反辐射导弹(Anti-Radiation Missile,ARM)威胁,德国应用科学研究所(FGAN)Wirth[11–13]提出了发射端采用连续波、宽波束设计,将雷达辐射功率在时间/空间上进行分散,降低时空功率密度,接收端采用同时多波束,实现连续空域覆盖,即提出泛照灯雷达(Floodlight Radar)的概念。为验证系统的有效性,FGAN建立了全向低截获雷达试验系统(Omnidirectional LPI,OLPI)。OLPI工作于S波段,发射连续波,发射功率10 W,方位覆盖120°范围,俯仰覆盖20°范围。如图2(b)所示,接收阵列为64列偶极子天线组成的平面阵列,接收时首先采用64通道Butler矩阵实现方位向同时多波束,然后再对每个波束进行数字化,多波束间交叠正交,波束宽度约为2°。OLPI采用模拟波束形成方式,验证了全息凝视体制用于实现低截获探测的性能优势。
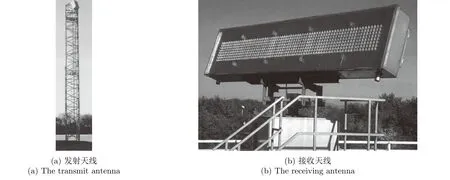
图2 OLPI雷达[12]Fig.2 OLPI radar[12]
1993年,我国科研人员基于RIAS相同概念建造了综合脉冲孔径雷达(Synthetic Impulse and Aperture Radar,SIAR)并开展相关关键技术研究[14–17],SIAR的脉冲综合保持了对某些方向的计算,等效于把雷达波束固定在某些方向,SIAR中不存在波束扫描概念,积累时间只受目标运动和雷达参数影响,与波束对目标的扫描时间无关,实验及相关分析验证了SIAR具有反隐身、反侦察、抗ARM和抗干扰的性能优势,同时文献[18]也指出满足多波束实时处理所需的计算能力是建造综合脉冲孔径雷达系统的难点之一。在这个阶段,尽管接收阵列稀疏布阵,但由于当时实际信号处理能力的限制,实际的SIAR系统很难做到接收波束对发射波束空间的全部覆盖,相当于对能量利用率作出一定牺牲。
1999年,美国海军研究实验室(Naval Research Laboratory,NRL)Skolnik[19–21]提出泛探雷达(Ubiquitous radar)概念,即采用全向或者很宽的发射波束,接收采用数字波束同时形成多个窄波束覆盖发射区域,可实现对观测空域的时域、空域的连续观测。Skolnik总结泛探雷达的主要优势在于可实现同时多功能并能够提高雷达抗截获性,并指出该性能主要依赖于数字波束形成与数字信号处理能力。随后NRL完成泛探雷达系统研制[22],并基于该系统验证了泛探雷达性能优势,同时指出,全息凝视雷达长时间积累必须解决跨距离单元和跨多普勒单元现象带来的积累增益下降问题。
2003年,美国林肯实验室对全息凝视模式和MIMO模式进行对比,并指出数字阵列雷达发射分集波形可进一步发挥全息凝视雷达性能优势,并研制L波段MIMO体制泛探多功能数字阵列雷达用于技术验证[7],泛探模式与MIMO的结合进一步增加系统时间-能量管理的灵活性,以适应不同场景的目标探测。
近年来,随着高速总线及高性能处理系统发展,全息凝视雷达计算量问题对系统的限制越来越小,全息凝视雷达频段不断扩展,系统规模不断增大;同时与智能信号处理、分布式等新技术结合,使得凝视体制应用范围进一步扩展,总的来说主要包括以下方面:
(1) 空中/地面/海面监视雷达
2010年以来,英国Aveillant公司采用了泛探雷达的思想研制出图3所示不同威力、不同空域覆盖的系列化产品[23],相关参数如表2所示。该类产品可实现全空域、全时间的连续探测,且利用长时间相参积累带来的高多普勒分辨率,实现目标的微多普勒测量。基于该系列产品,已完成风力发电厂涡轮杂波抑制[24]、无人机探测识别[25–32]、鸟类探测识别[27,33]、非合作目标监视[34,35]、智能信号处理[36,37]、分布式探测[38–40]等试验验证,证明了该系统应用于鸟类、无人机等“低慢小”目标探测识别具有独特优势。
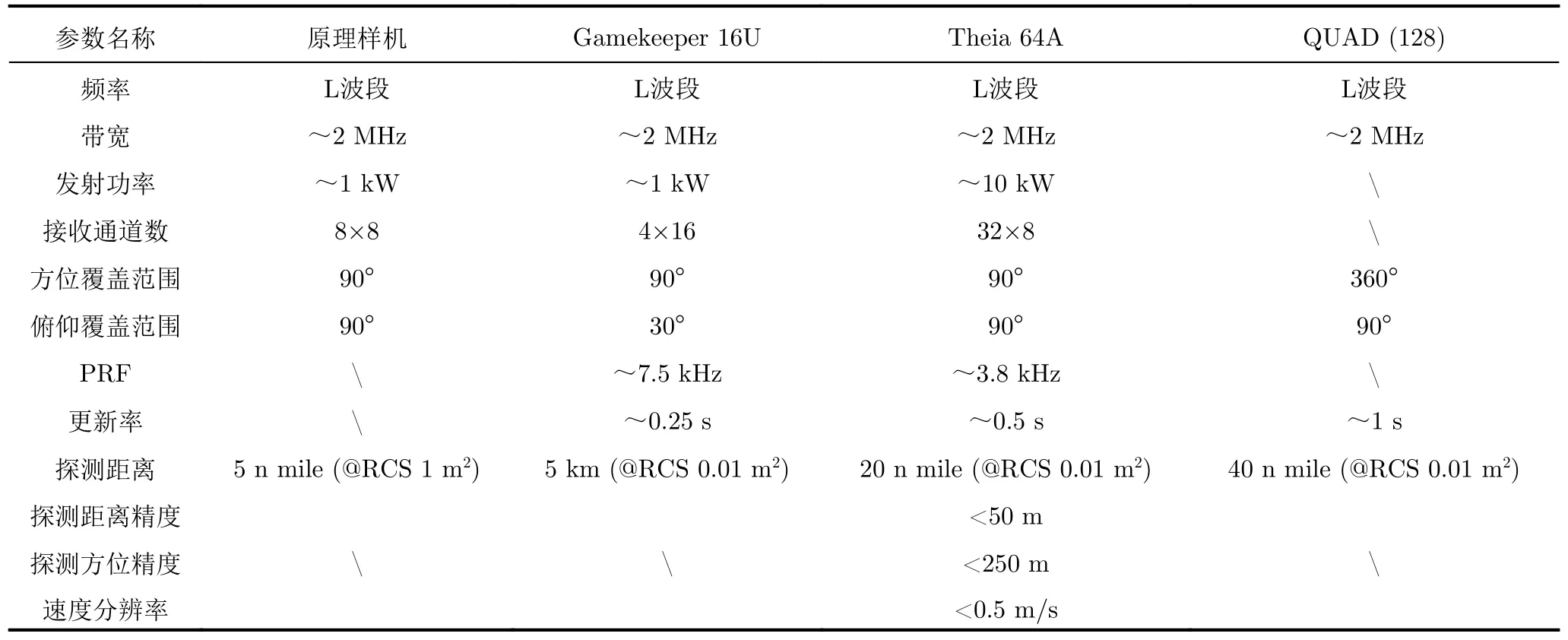
表2 Aveillant公司全息雷达系统参数[24–30]Tab.2 Basic technical parameters of Aveillant's holographic radar[24–30]

图3 Aveillant公司全息雷达系统[24–30]Fig.3 Holographic staring radars of Aveillant[24–30]
2015年,QinetiQ公司推出采用泛探思想的图4(a)所示的Alarm凝视雷达[41,42],主要用于小型基地防御。该雷达方位覆盖120°。仰角覆盖30°,工作频段C波段(4~6 GHz),发射功率100 W,已装备于英国部队,可实现火箭弹探测与告警以及悬停无人机探测等功能。处理过程中,该系统先进行俯仰维数字波束形成,再进行方位维数字波束形成,文献[41,42]给出了该系统试验结果,在火箭弹由远及近向雷达方向飞行过程中,俯仰测量的最低角度约3°。随后该公司又推出Obsidian凝视雷达[43],天线采用无活动部件的全固态印制电路结构,降低维护成本,每个系统包含5个阵列天线,工作时同时形成16个固定波束。发射波形为调频连续波,工作频率约10 GHz,方位覆盖180°。仰角覆盖90°,距离分辨率3 m,具有良好的多普勒分辨率,可对低速旋翼无人机目标、高机动固定翼目标有效探测识别。

图4 QinetiQ公司全息雷达系统[41–43]Fig.4 Holographic staring radars of QinetiQ[41–43]
2017年,意大利芬坎特里集团公司旗下SEASTEMA公司推出图5所示新型OMEGA360全息凝视雷达[44–46],采用216列组成的环形结构天线,每列包含8个辐射单元和1个8通道无源带状线功分器,各列具有单独的接收通道用于射频信号放大、滤波下变频以及数字采样,4个接收通道组成1个单独的Q-Pack模块。采集数据送到中央处理单元进行实时处理,同时形成192个接收波束(波束宽度约为2°)实现方位维360°范围内凝视探测。OMEGA360工作频段为X波段,发射波形为线性调频信号,带宽为5 MHz,其可在严重杂波干扰下探测水面目标和低空目标,包括潜望镜、小艇、浮标、小型无人机、直升机、掠海导弹等。

图5 OMEGA360全息凝视雷达[44–46]Fig.5 OMEGA360 holographic staring radar[44–46]
中山大学智能感知团队在系列国家项目资助下,与国外同步开展了全息雷达技术研究与系统研制工作[47–53],经过十余年的研究发展,已成功研制了图6和图7所示L,S等频段全息雷达产品,相关参数如表3所示。团队基于所研制的全息凝视雷达系统,开展了较为丰富的外场试验验证工作。如图8所示,在空中目标监视方面,团队与中国民航科学技术研究院合作开展基于全息雷达的外场鸟情感知探测实验,证明了全息凝视雷达在低空目标监视识别方面的优势。一方面,全息雷达的高速度分辨率可为距离和方位都无法分辨的集群目标提供分辨手段,如图9所示,图中横坐标代表目标速度,其中出现的两个尖峰即为全息凝视雷达对集群中个体目标的速度分辨结果;另一方面,全息凝视雷达连续探测和高驻留时间工作方式有助于提取目标的微多普勒,从而提高目标识别准确率[54–58],实测数据验证表明,综合利用目标微多普勒特征、运动特征、RCS特征等可实现低慢小目标97.62%的识别准确率[59–61]。

表3 中山大学全息雷达系统参数Tab.3 Basic parameters of the holographic staring radar developed by SYSU

图6 L波段全息凝视雷达Fig.6 L band holographic staring radar

图7 S波段全息凝视雷达Fig.7 S band holographic staring radar

图8 全息凝视雷达机场鸟情感知试验Fig.8 Birds detection trials in airport

图9 集群目标速度分辨结果Fig.9 Group target detection results
在边境地区的安全防控应用方面,团队在云南等地基于L波段全息凝视雷达开展了针对边防应用的外场探测实验,图10为相关实验场景与结果,经验证,L波段全息凝视雷达可穿透10~20 m中等密度树林,实现了6公里外人员、车辆目标探测。在海防应用方面,团队与海军航空大学海上目标探测课题组合作开展基于S波段全息凝视雷达的海面目标监测、检测、识别等试验验证工作,图11为海面目标探测试验雷达架设场景与目标测量结果。验证了全息凝视雷达可用于大型轮船、渔船、摩托艇、蛙人、浮标等目标的海面监视任务,其全时空域、高多普勒分辨率的特点为复杂海况下海面弱目标探测提供了新的技术手段。

图10 针对边防应用的外场探测试验Fig.10 Target detection trials for frontier defense applications

图11 海面目标探测试验Fig.11 Sea surface target detection trials
同类型系统还包括以色列航空工业公司(IAI)推出了用于地面和海岸警戒全息凝视雷达系列产品[62–64]、马德里理工大学研制的X波段全息雷达样机[65–69]、以色列埃尔比特公司(Elbit Systems)的MBR 16全息雷达系统[70]、匈牙利的MBR-3D地空监视雷达[71]等。
(2) 凝视成像雷达
在雷达成像方面,传统合成孔径雷达(Synthetic Aperture Radar,SAR)存在成像幅宽和分辨率之间矛盾,一种方式是将接收阵面分割为多个子孔径,然后多个子孔径同时形成不同指向接收波束实现大场景和高分辨成像,但是这种方式无法充分利用天线的孔径增益[72];另一种方式即采用多波束凝视成像方式,利用整个阵面所有接收通道进行DBF同时形成多个窄波束,可有效降低每个区域的多普勒谱宽,抑制多普勒频率模糊,实现高分辨率宽幅成像[73–75]。如图12所示,凝视成像系统每个接收波束固定接收成像区域的回波,保证了对成像区域的积累时间,满足设定合成天线口径,实现方位向的高分辨;系统可获得较高的波束增益,实现高信噪比,从而高效利用雷达功率口径积。中外相关研究人员先后研制了具有多波束凝视成像功能的L波段[76]、X波段[77–79]以及Ka波段[80]DBF-SAR系统,验证了数字波束形成技术与多通道体制可用于解决方位分辨率与距离幅宽之间的矛盾,实现高分宽幅成像。

图12 多波束凝视成像示意图[75]Fig.12 Schematic diagram of staring digital multiple beams SAR[75]
(3) 超视距雷达
超视距雷达利用高频电磁波的绕射或反射,实现对视距外目标的远距离探测,工作频段一般为3~30 MHz的短波频段,具有探测距离远、监控范围大、超低空探测能力强、反隐身性能好等优势,因此超视距雷达常架设在海岸滩头担负对海上目标和超低空飞行目标的超视距警戒、海情监测、战场监控等任务。超视距雷达一般在频域进行目标检测,即对接收到的信号进行长时间相干积累,获得较高的多普勒分辨率,进而能从强海杂波中超视距发现微弱目标,甚至可发现几千公里外战斗机目标。然而,对于传统体制的超视距雷达,较长的积累时间使得数据更新率下降,将不利于多目标快速跟踪。为克服该问题,图13所示的新体制超视距雷达[81]开始测试应用,新体制超视距雷达一方面采用MIMO技术发射多个相互正交波形,扩展目标监视区域,增加角度分辨率;另一方面进行多波束同时接收凝视处理,增加多目标积累时间以提高微弱目标的分辨能力。

图13 澳大利亚HILOW超视距雷达试验发射阵列[81]Fig.13 Photograph of the OTHR transmitter array used in the HILOW experiment[81]
(4) 自动驾驶雷达
车载毫米波雷达是高级驾驶辅助系统(Advanced Driving Assistance System,ADAS)中的重要传感器,具有体积小、成本低、全天时全天候工作等优势。图14为典型自动驾驶雷达波束示意图,采用MIMO技术进行多波束凝视探测,可提高波束驻留时间从而增加多普勒分辨率,获得较高的杂散抑制与目标分辨能力,且全时空覆盖,实现车辆前方视野中多个潜在目标的同时检测跟踪。全息凝视工作模式是提高车载毫米波雷达工作性能,保障获取安全驾驶所需环境信息的重要手段。

图14 自动驾驶雷达波束示意图[1]Fig.14 The illumination beam and multiple receive beams of a vehicular radar system[1]
(5) 被动凝视雷达
被动凝视雷达是指利用第三方非合作辐射源发射的电磁信号来照射目标,自身利用多波束凝视技术被动地接收目标散射信号而实施探测的新体制雷达[82]。与主动凝视雷达不同点在于发射波形未知,那么被动凝视雷达通常需要复杂波形恢复处理,处理时设置监测通道和参考通道,利用适当延时的参考信号对探测区域监测信号进行匹配滤波获取距离多普勒谱。图15为亨索尔特公司Twinvis被动雷达,系统包含两个圆形阵天线,分别用于VHF和UHF信号接收,采集系统对所有阵元接收信号进行数字采样,进而实现自适应波束形成和即时全向跟踪。

图15 亨索尔特公司Twinvis被动雷达[1]Fig.15 The Hensoldt Twinvis passive radar system[1]
总的来说,早期由于系统成本、计算资源等限制,全息凝视体制雷达系统在频段选择、系统规模、应用场景方面受到极大限制,主要集中在低频段稀疏阵列反隐身探测方面。近年来,半导体技术的发展推动了高集成度阵列、多通道模数转换、大带宽数据传输、高性能计算等技术在雷达系统设计方面的应用。全息凝视雷达频段不断提高,系统规模不断增大,应用场景不断扩展,全息凝视体制已在多功能目标监视、低截获探测、凝视成像等方面展示出了卓越性能。
4 全息凝视雷达关键技术
图16为全息凝视雷达接收处理流程,全息凝视雷达作为数字阵列雷达的子类,单路波束处理采用常规的雷达信号处理流程。同时,全息凝视雷达特殊的工作方式使其具备独特性。如全息凝视雷达宽波束发射、同时多波束接收,要求系统具备更灵活的波束控制能力;全息凝视雷达无需波束扫描可实现更长时间积累,要求系统解决跨距离单元、跨多普勒、跨波束的“三跨”问题;全息凝视雷达宽波束发射容易带来更加严重的多径问题,要求具有相干信号处理能力等,下面重点阐述全息凝视雷达相关关键技术研究的进展情况。

图16 全息凝视雷达信号处理流程Fig.16 The signal processing diagram of holographic staring radars
4.1 全息凝视雷达收发波束控制技术
在发射波束宽度控制方面,功放饱和工作状态下,实现波束展宽主要有两种[4],一是阵面划分方法,仅利用阵面中部分单元合成波束;二是天线全部阵元通过调整相位加权实现波束展宽。天线各阵元以线性调频信号的变化规律加权可实现空间谱扩展,展宽后波束增益下降,波束内出现波动。基于相位加权的波束展宽问题可以看作各阵元加权系数ωn优化问题,因此可利用梯度搜索算法[83]、遗传算法[84]、均方根(Root Mean Square,RMS)近似算法[85]、2阶锥规划(Second-Order Cone Programming,SOCP)算法[86]、二次相位分布方法[87]、随机相位分布方法[88]获得相位加权的估计值。如图17所示,文献[89]基于已知最优同伦和随机梯度下降联合算法使用构造的罚函数参数族进行波束展宽,展宽因子大于2.5倍,即相比于未采用波束展宽的小的阵列,大阵列经过波束展宽获得与之相同的波束宽度,波束指向范围内辐射功率提高至少2.5倍。文献[90]将辐射功率表示为正弦或余弦函数,并利用函数的正交性获取包含期望功率与阵元相位的方程组,求解后可以得到阵元相位加权值。文献[91–93]将宽波束定义为覆盖该范围内的一系列窄波束,给出可行的阵元相位加权值计算方法,并将该方法用于机载气象观测雷达系统。

图17 波束展宽前后的波束图[89]Fig.17 Beam before and after broadening[89]
在接收数字波束形成方面,自20世纪70年代以来,已开展了广泛而深入的研究,提出了一系列波束形成算法。早期的如线性约束最小方差算法(Linear Constraint Minimum Variance,LCMV)及其改进算法[94–96]、对角加载法[97]、特征子空间类算法[98,99],LCMV算法缺点在于增加的约束个数将降低算法的自由度,且在角度估计误差大时,阵列的空间分辨率将下降。对角加载法性能受对角加载系数的选取影响强烈,系数选取过小时影响稳健性,选取过大时又会减弱波束形成器对干扰的抑制能力。特征子空间类算法则要求信号干扰子空间维度必须精确已知,低信噪比条件将严重影响算法性能。近年来提出的较为先进的稳健自适应波束形成算法包括基于导向矢量不确定集的稳健自适应波束形成算法[100–102],这些算法将对角加载量的选取和导向矢量的不确定集紧密联系起来,给出了一种具有较好的稳健性和一定的可操作性的最优对角加载量选取方法。在此基础上,人们先后提出了大量的改进算法分别用于减轻算法对于不确定集上界取值的敏感度[103–105]、改善用户参数设置[106,107]、降低训练数据中期望信号带来的误差[108–110]。
总的来说,以上相关波束控制技术仅以相位优化手段,实现收发波束的灵活控制。为应对更加复杂的探测环境与多变的电磁干扰,需结合全数字化阵列中阵元数目、阵元分布、发射信号波形、发射信号频率等参数进行综合优化,充分发挥全数字雷达多维自由性,以实现更好的目标检测和跟踪性能以及更强的干扰抑制能力的阵列波束综合技术尚需进一步研究。
4.2 全息凝视雷达目标积累检测技术
全息凝视雷达发射采用宽波束、接收采用同时多波束,提高了波束在特定指向的驻留时间,实现波束覆盖区域的连续观测,为目标长时间积累提供了保证,但延长积累时间可能出现跨距离单元、跨多普勒、跨波束的“三跨”问题,大大降低长时间积累的效果。相关研究根据是否利用雷达目标回波的相位信息,可将长时间积累分为相参积累、非相参积累和混合积累3种。
相参积累利用回波幅度和相位信息进行目标能量的积累,相参积累通常通过动目标检测(Moving Target Detection,MTD)完成[111,112],然而,随着积累时间的增加,运动目标可能会出现距离单元走动和多普勒单元走动,严重影响积累增益,为此采用距离补偿和相位补偿进行克服。距离补偿方法主要包括适用于1阶运动的尺度傅里叶变换(Scaled Inverse Fourier Transform,SCIFT)距离补偿方法[113]、适用于指定阶数的广义Keystone[114–116]和广义Radon[117,118]高阶运动距离补偿方法、适用于指定速度范围内的任意机动形式的相邻互相关函数(Adjacent Cross Correlation Function,ACCF)距离补偿方法[119–121]。相位补偿方法主要包括用于1阶相位补偿的快速傅里叶变换(Fast Fourier Transform,FFT)、用于2阶相位补偿De-chirp[48]、离散Chirp傅里叶变换(Discrete Chirp-Fourier Transform,DCFT)、Chirp-let[122]、分数阶傅里叶变换(Fractional Fourier Transform,FRFT)[123,124]、吕分布(Lv’s Distribution,LVD)[125,126]算法、用于3阶相位补偿的Radon分数模糊函数(Radon-Fractional Ambiguity Function,FRAF)算法以及用于指定阶数的多项式相位信号(Polynomial-Phase Signal,PPS)高阶相位补偿算法。距离补偿和相位补偿一般依次进行[117,118,121],利用目标回波距离走动和相位变化的耦合关系,也可同时补偿距离和相位[127–131]。
非相参积累仅利用回波的幅度信息,而不利用回波的相位信息,主要包括轨迹参数匹配法、动态规划法、递归贝叶斯滤波法和随机有限集法。轨迹参数匹配法主要包括Hough变换法[132–134]和Radon变换法[135,136],通过建立目标运动轨迹的参数化方程,与雷达回波数据相匹配,得到积累结果与轨迹参数的函数。动态规划(Dynamic Programming,DP)法依照阶段指标函数的选取分为两类,分别以信号和噪声分布模型构造的似然函数和信号幅度值作为极端指标函数[137,138],动态规划算法应用于雷达领域具有实现技术简单、可拓展性好等优点,但是过高机动性容忍度会引发冗余轨迹的积累,导致虚警概率的提高,且分叉效应使其难以对密集分布目标展开分辨。递归贝叶斯滤波法是通过扩展目标状态定义,将目标存在性加入到目标状态的描述中,得到目标存在及目标状态概率的后验概率分布[139]。随机有限集法[140,141]是递归贝叶斯滤波方法在可变数目多目标情形下的推广。
混合积累是将相参积累与非相参积累相结合,一般采用“段内相参积累+段间非相参积累”的方式,可实现运算量与信噪比增益的平衡。文献[142]将长时间积累处理分解到多个子孔径,子孔径内采用相参积累,子孔径间采用广义Radon变换进行非相参积累补偿目标的跨距离单元与跨多普勒单元走动问题。如图18所示,文献[143]将参数空间分割为多个等维度子空间并进行子空间移动,然后将混合积累算法应用于各个子空间,实现目标检测性能与计算复杂度的折衷。

图18 混合积累原理示意图[143]Fig.18 Diagram of the principle of hybrid integration[143]
全息凝视雷达具有同时多功能特点,能够针对近、中、远程空域不同距离目标,实现多重数据率的积累检测,可采用两种方法选择合适长度的相参处理时间(Coherent Processing Interval,CPI)和积累方式。一是变长CPI相参积累,首先根据系统指标估计信号输出端所需信噪比,确定最远作用距离积累时间和积累脉冲数,然后根据理想相参积累增益与积累脉冲数的关系推导不同距离段的CPI长度,进行相应长度的相参积累;二是定长CPI与变长非相参积累结合的方式,首先选定固定长度的CPI作相参积累,然后根据不同距离目标检测信噪比要求,选择不同数目的CPI处理结果进行非相参积累。
总的来说,当前积累检测技术一定程度上满足全息凝视雷达目标探测需求,但对于密集杂波、强电磁干扰、极隐身小目标等复杂情况,尚需进一步开展数据处理与信息处理一体的精细化处理技术,提高点迹信息的全面性,优化跟踪与航迹质量。
4.3 全息雷达目标角度估计技术
全息凝视雷达目标角度测量时,由于任一目标在不同指向波束中均有响应,可采用传统单脉冲角度测量方法,即通过相邻两波束的信号功率比值获取目标角度。但由于采用较宽的发射波束,雷达不可避免地会受到严重的多径效应的影响,直达波与反射波通常位于一个波束宽度之内且具有强相关性,通常难以从空域、时域、频域和多普勒域上对直达波和多径回波进行分辨,将对目标角度估计带来严重影响,目标俯仰角估计时尤其严重。
多径效应下相干信号角度估计方法主要集中在改进单脉冲测角技术[144,145]和空域滤波方法[146]上,近年来,随着阵列信号处理技术的发展,利用超分辨测向技术进行低空目标测高成为研究热点。其中多重信号分类(Multiple Signal Classification,MUSIC)方法[147]和最大似然(Maximum Likelihood,ML)算法[148,149]最为著名。MUSIC算法处理相干信号角度估计问题时,需要进行解相干预处理以恢复接收信号协方差矩阵的秩,最大似然估计方法用含有未知参数的条件概率密度函数拟合入射信号的似然函数,然后求得使似然函数最大的未知参数的解作为该参数的估计,求解过程涉及的多维联合搜索。于是将交替投影(Alternating Projection,AP)策略应用到相干信号角度估计中[150],将多维搜索转换为一维搜索,减小计算量。
具体到低空目标俯仰角估计问题,改进的最大似然(Refined Maximum Likelihood,RML)算法[151,152]充分利用包含目标距离、天线架高、地球曲率和大气折射等先验信息的多径模型,将地面反射信号入射角度等未知量用待估计的直达波入射角度表示,然后构造合成导向矢量,进而利用一维搜索最大似然估计方法获取直达波入射角度的估计值。文献[153,154]考虑反射特性的不均一性,提出了扰动多径模型,为不同阵元分配不同的复反射系数以反映复杂阵地对多径回波的影响,并利用正交匹配追踪和稀疏贝叶斯学习方法对入射信号进行稀疏重构,获取目标入射角度,扰动多径模型较好地反映了复杂阵地对于多径信号的影响,更适用于复杂阵地。经典多径模型和扰动多径模型都基于一个重要的假设,即来自反射区的多径回波可以视为一条与直达波相干的多径信号,且反射信号与直达波信号仅发生了幅度和相位的改变。但是实际阵地环境中,多径回波经地面反射会有一定的聚合和分离作用,反射回波不再是仅沿着一条路径,反射点也不再是第一菲涅尔区的中心。此时,多径信号同时存在多路径、不均匀能量分布等特征。为此,文献[155]考虑到精确多径信号模型中多径信号的衰减系数等因素,提出了精确多径信号模型的合成导向矢量地形匹配最大似然估计算法。文献[156]研究未知反射面高度和反射路径数的复杂阵地环境下MIMO雷达低空目标测高方法,利用秩1约束条件估计出包含目标及其镜像仰角信息的复合导向矢量,并利用稀疏重构方法估计低空目标俯仰高度。文献[157]基于图19所示多径模型并充分利用全息雷达已知发射信息并提高复合导向矢量估计精度,从而获得更准确的俯仰角估计结果,文献[158]基于L波段全息凝视雷达对DJI Mavic 2 Pro无人机探测的实测数据验证低空目标俯仰角估计方法,获得了良好地效果。
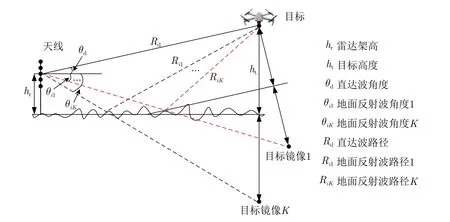
图19 复杂阵地低空目标俯仰角估计模型[157]Fig.19 Multipath signal model for locating low-altitude small target in complex terrain environment[157]
总的来说,全息凝视雷达宽波束发射的特点使得多径效应越来越严重,给低空目标角度尤其俯仰角估计带来严重影响,传统通用相干信号角度估计方法和目前低空目标俯仰角估计方法未利用或仅部分利用反射模型、发射信号信息以及目标特征信息,存在角度估计结果误差严重或计算量大的问题。如何充分利用发射波形特征、探测环境特征、目标特征等信息,以进一步提升全息凝视雷达目标角度估计方法还有待进一步研究。
5 全息凝视雷达发展趋势
随着目标环境、电磁环境的不断变化,对全息凝视雷达系统的覆盖性、时效性、精确性、对抗性、体系性要求也越来越高,全息凝视雷达中“全息”这一概念将进一步拓展,“全息”将向着空、时、频、能量、极化、编码等多维资源的综合全面利用方向发展。在开放式、通用化、软件化的灵活硬件平台支撑下,多样化波形设计拓展全息凝视雷达编码资源的利用;环境自感知、闭环反馈、知识与数据联合驱动等智能化处理提高全息凝视雷达系统适应性;分布式、网络化、协同管理扩展全息凝视雷达目标多维度信息搜集能力,增强系统功能和性能潜力。
5.1 灵活波形设计
近年来,硬件水平的发展为复杂波形产生处理提供了物理基础,通过波形设计与优化,选择与目标环境相匹配的波形,可有效提升雷达在复杂战场环境的适应能力。波形设计已经得到行业的广泛关注,成为雷达博弈对抗的新的领域。全息凝视雷达需结合应用场景,开展特定目标的波形设计研究。如通过频率变换、相位调制、多相编码等手段增加全息凝视雷达发射波形的多样性,尽可能减少单位带宽的频谱密度,实现低截获概率射频隐身信号波形设计[159,160];或将通信信息嵌入雷达发射波形来设计以及利用传统通信波形进行雷达探测,实现感知通信一体化波形设计[161,162];还包括多天线发射相互正交或部分相关信号,在较大空域范围内形成低增益宽波束同时覆盖的正交分集波形设计[163–165]等。波形的优化设计与运用将成为提升全息凝视雷达复杂场景多任务性能的关键要素。
5.2 智能化全息雷达系统
智能化是提升全息凝视雷达的环境感知能力、增强系统自适应性以应对日益复杂的强电磁对抗环境的重要手段。在任务管理方面,全息凝视雷达的接收多波束可单独控制实现同时多功能,采用知识与数据联合驱动的智能处理技术,以对目标和环境感知分析为基础,可实现对不同任务最优资源分配,获取不同目标的最优探测性能;在目标检测方面,可以对典型干扰、杂波等实现精细化建模与特性学习,从而减小干扰、杂波等造成的虚警,提高弱小目标的检测能力;在目标识别方面,借助智能化处理方法,对全息凝视雷达提供的目标运动特征、RCS特征以及精细的微多普勒特征进行信息挖掘分类,提升目标识别的稳定性。总的来说,全息凝视雷达感知技术与人工智能技术亟待进行更深度融合,以发挥极大的应用潜力。
5.3 多功能/任务全息雷达系统
如图20所示,全数字收发控制使得全息凝视雷达可实现多功能性,一部雷达能够起到多部雷达的作用,具备远程预警探测、重点目标精密跟踪、超低空突防目标监视、集群目标识别等多种工作模式,满足多种感知需求,并且可以部署在陆基、海基或空基平台上。另外,全息雷达可实现系统的多任务性,综合利用系统射频孔径、射频前端、信号与信息处理、显示等功能模块,实现探测、通信、干扰、导航、敌我识别等多功能一体化。

图20 雷达多工作模式示意图[166]Fig.20 Schematic diagram of multifunctional radar[166]
5.4 分布式全息雷达系统
随着单部雷达越来越突出的性能瓶颈及应对未来新型威胁时的困境,如图21所示雷达探测体制正在从当前的单一雷达探测转向分布式多雷达协同探测。与单基地雷达相比,分布式多雷达可从时间、空间、频率和极化等多个维度收集目标散射信息,具备扩展雷达系统功能和性能的潜力。

图21 分布式全息雷达协同探测Fig.21 Schematic diagram of distributed holographic staring radar
分布式全息雷达潜在优势包括:(1)“马赛克”化提高战场生存能力和可靠性;(2)空间分集、数据联合处理,提高抗干扰性能;(3)多视角探测,提高隐身及弱小目标检测和识别性能;(4)分布式联合处理,增大阵列孔径,提高目标位置估计精度和分辨力。且随着无人机、水下航行器等处于运动平台的传感器日益增多,将分布式全息雷达布置于各运动平台,可进一步提升系统灵活性,实现各类不同目标的高精度探测。
6 结语
全息凝视雷达能够对目标探测区域进行连续时空覆盖,尽可能多地利用雷达发射信号功率获取目标多维完整信息。然而宽波束发射并依靠长时间积累的技术体制使其面临发射增益低、计算量大等问题。当前,模拟/数字收发通道、高性能信号处理等硬件技术以及先进信号处理算法的发展一定程度上克服全息凝视雷达系统难点,全息凝视雷达频段不断扩展,系统规模不断增大,其同时多功能、抗截获、高多普勒分辨率等优势得以充分发挥,于是在空中/地面/海面监视、“低慢小”目标探测、集群目标探测、低截获概率探测等多方面取得广泛应用。未来,智能化、网络化和多功能/任务一体化技术的发展进一步拓展“全息”概念,空、时、频、能量、极化、编码等多维资源的综合全面利用将提高全息凝视雷达系统适应性,改善全息凝视雷达探测性能。
猜你喜欢
军事文摘(2022年8期)2022-05-25
少儿美术(2019年11期)2019-12-14
电子制作(2019年15期)2019-08-27
通信技术(2019年3期)2019-05-31
小学生学习指导(低年级)(2018年12期)2018-12-29
电子测试(2018年6期)2018-05-09
声学与电子工程(2017年1期)2017-06-22
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07