虚拟同步机控制逆变器与柴油发电机组并联运行控制策略
2023-05-04 02:42:30赵友诚朱长青刘金宁洪欣雨
兵器装备工程学报 2023年4期
赵友诚,朱长青,刘金宁,安 树,洪欣雨
(陆军工程大学石家庄校区, 石家庄 050003)
0 引言
随着环境问题的日益突出以及分布式发电技术的不断成熟,以新能源发电为主、包含各种分布式发电单元(DG)的微电网应运而生[1-2]。在脱离了大电网的偏远山区、海岛等地区,以太阳能、风能等新能源发电单元与柴油发电机组(DGS)并联组成的独立型微电网成为其主要的供电形式[3]。但是逆变器与柴油发电机组在响应速度、输出特性等方面有很大的不同,若将二者直接并联,会出现较大环流,影响系统的稳定性[4]。
为了提高逆变器与柴油发电机组并联运行的稳定性,国内外学者展开了大量研究。文献[5]提出了一种基于模式期切换的逆变器与发电机组并联运行的控制策略,但该方法要区分逆变器在不同的运行工况下发电机组并入的情况,控制过程较为繁琐,不利于实际应用。文献[6-8]提出了一种分层控制策略,通过在系统中设立各级通信线路,而后上级控制层经由通信线路向并联系统发出功率分配以及频率稳定的控制信号,但是这种控制方法应用在独立型微电网中会增加整个系统模型的复杂性,降低可靠性。柴油发电机属于机械惯性设备,而逆变器属于电力电子设备,不具备柴油发电机那样的惯性和阻尼特征。为此,有学者提出将同步发电机的调速和调压控制方程加入到逆变器的控制中去,使得逆变器具有发电机那样的惯性和阻尼特征,这就是虚拟同步机(virtual synchronous generator,VSG)控制策略[9]。文献[10-13]提出了一种自适应惯量系数法的VSG控制策略,使得逆变器在与柴油发电机组并联的过程中可以实现VSG惯量和阻尼系数的自适应调整,并机切换过程更加平滑,但是这种控制方法更多地模拟的是同步发电机的特性,没有考虑到柴油发动机的特性,造成二者在并联运行过程中的稳定性欠佳。
在逆变器与柴油发电机组并联运行的系统中,应充分考虑到柴油发电机中发动机系统的运行特性。但是现有的VSG控制策略大多只是模拟了同步发电机的特性,忽略了发动机部分,这样会使并联系统产生较大的冲击和波动,不利于系统的稳定。本文在分析VSG控制策略的基础上,提出了一种逆变器虚拟柴油发电机控制策略,通过研究柴油发动机的结构以及运行特性,建立虚拟柴油发动机的模型;同时再结合VSG控制策略中虚拟励磁机模型,建立虚拟励磁机控制器模型,从而使得逆变器可以更好地模拟柴油发电机组的运行特性,提高其与柴油发电机组并联运行的稳定性。最后通过仿真验证了本文所提策略的正确性和有效性。
1 虚拟同步机(VSG)控制策略
虚拟同步机控制策略的实质是将同步发电机的控制算法加入到逆变器的控制策略中去,从而使得逆变器获得类似同步发电机的运行特性[14-15]。考虑到VSG控制策略可以模拟同步发电机的外特性,本文中以此为基础进行逆变器和柴油发电机机组并联运行控制策略研究。按照同步发电机的结构设计,虚拟同步机主要由两部分组成:虚拟原动机和虚拟励磁机[16]。
1.1 虚拟原动机的设计
VSG中虚拟原动机模拟的是同步发电机中原动机的结构设计,在系统负载有功功率变化导致频率出现偏差时,通过调节虚拟机械转矩来调整有功功率的输出,使得频率稳定在额定值附近。虚拟原动机的功频特性方程为:
(1)
式中:ω、ωn分别为实际转动的角速度和额定角速度;Pm、Pn分别为虚拟同步机的输出功率和额定功率;Kω为功频调节系数。由式(1)可以看出,虚拟原动机的功频特性具有类似于同步发电机调速器的有功-频率下垂特性,因此可以通过调节系数Kω的值来实现系统频率的稳定,并且合理地分配各逆变器输出的有功功率。虚拟原动机的控制框图如图1所示。
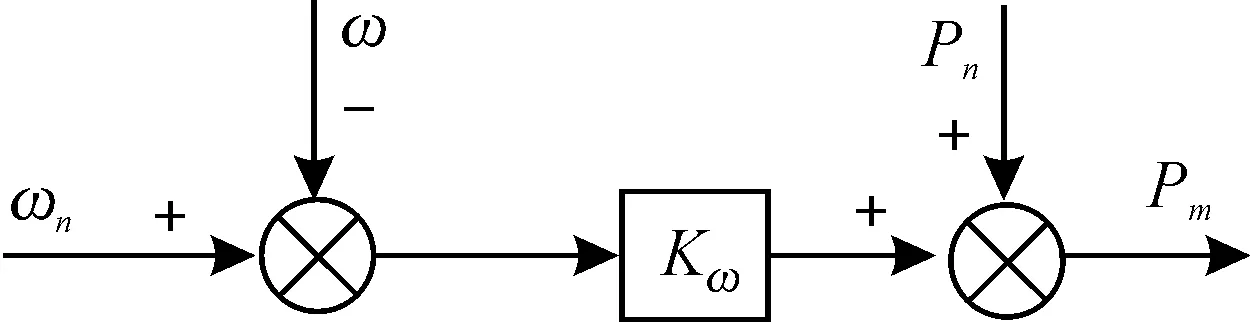
图1 虚拟原动机控制框图Fig.1 Control block diagram of virtual prime mover
由图1可以看出虚拟原动机在运行过程中可以直接由测得的频率偏差来调整输入的机械功率,整体控制十分简洁高效。但是虚拟原动机仅能模拟同步发电机中原动机的外特性,并不能模拟柴油发电机组中发动机部分的特性。
1.2 虚拟励磁机的设计
VSG中虚拟励磁机模拟的同步发电机中励磁调节器的结构设计,主要通过调整虚拟同步机的虚拟电势来维持端电压的稳定以及无功功率的分配。其电压控制方程为:
U=Un+Kq(Qn-Q)
(2)
式中:U为输出端电压的值;Un为空载电动势;Qn为无功功率指令值;Q为输出的无功功率;Kq为无功电压调差系数。由式(2)可以看出,虚拟励磁机也具有类似于同步发电机的无功-电压下垂特性,当负载无功功率变化时可以通过调整VSG的虚拟电势U来实现端电压的稳定及系统无功功率的调整。虚拟励磁机的控制框图如图2所示,当无功功率变化时控制器可以迅速响应,通过调节,维持端电压稳定在额定值附近。
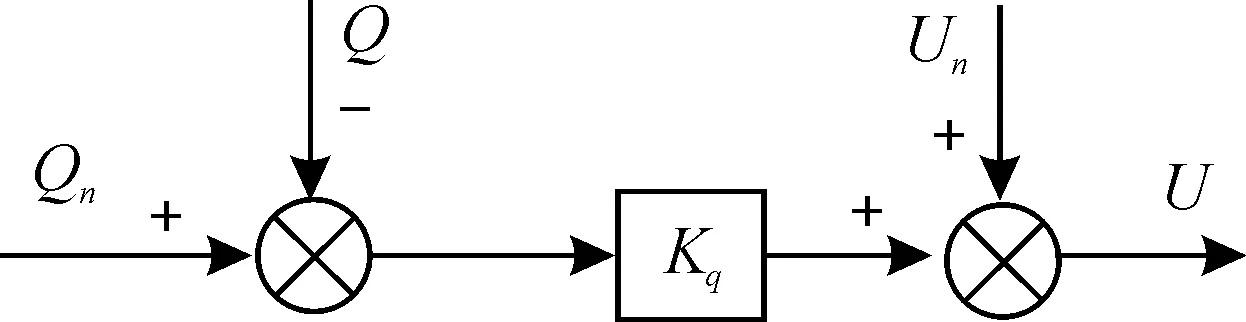
图2 虚拟励磁机控制框图Fig.2 Control block diagram of virtual exciter
1.3 虚拟同步机整体控制结构设计
逆变器的虚拟同步机控制策略是基于同步发电机原理建立的控制方法,可以模拟同步发电机的惯性与阻尼、有功调频以及无功调压的下垂特性,从而稳定系统的电压和频率,提高整个系统的稳定性。结合2.1、2.2建立的虚拟原动机以及虚拟励磁机模型,可得到VSG的控制结构,如图3所示。
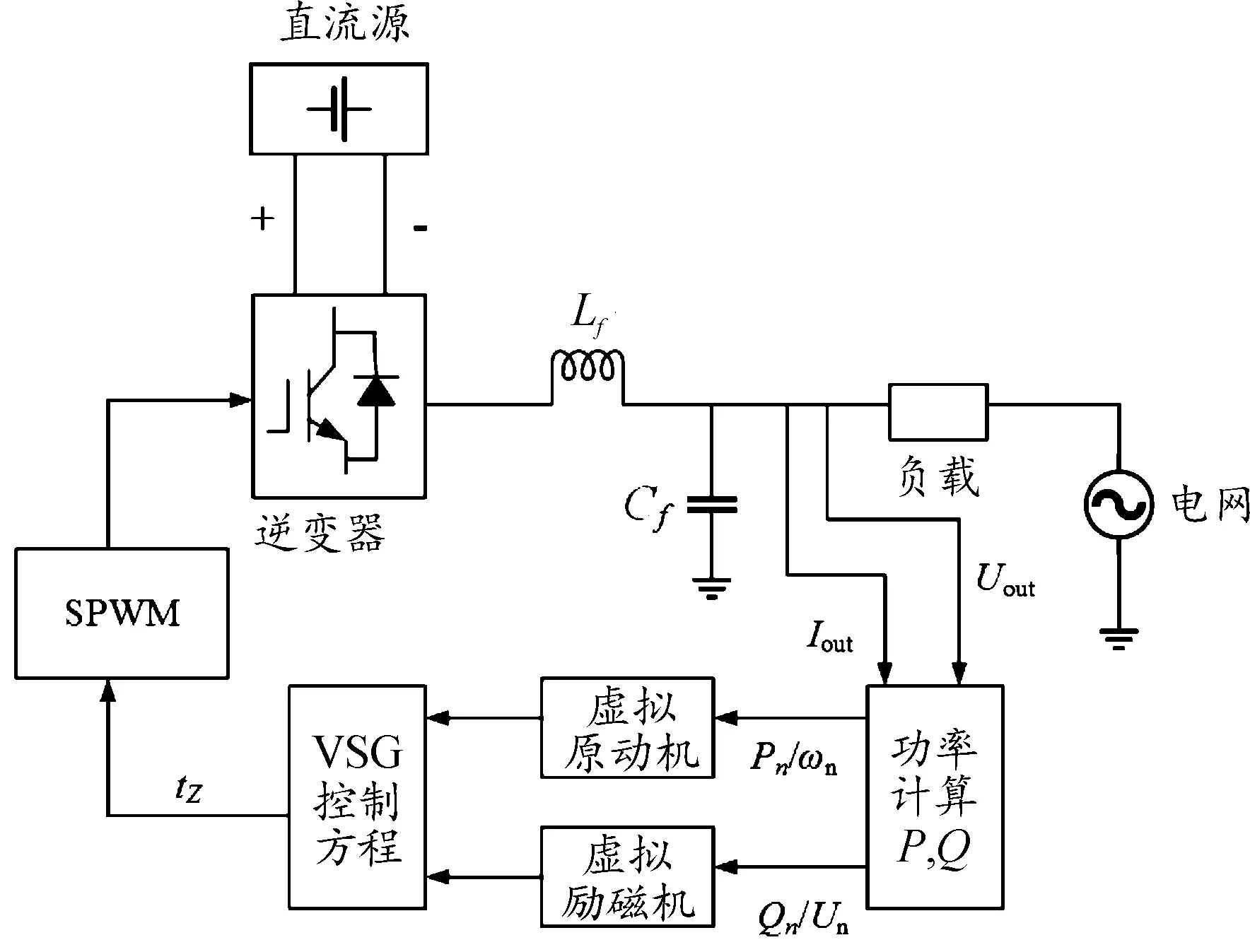
图3 VSG控制框图Fig.3 VSG control block diagram
由图3可以看出VSG控制策略具有类似于同步发电机的下垂控制特性,因此在多逆变器并联运行时可以维持系统频率和电压的稳定,还可以合理地进行功率分配。但是VSG控制策略没有考虑到柴油发动机部分,会使逆变器与柴油发电机组并联系统产生较大的冲击和波动,系统稳定性降低。在研究逆变器与柴油发电机并联运行的问题时,应充分考虑到柴油发电机中发动机部分的输出特性。本文中在VSG控制策略的基础上,结合柴油发电机中原动机和励磁机的控制方程,得到虚拟柴油发电机控制策略,可以提高逆变器与柴油发电机机组并联运行的稳定性。
2 虚拟柴油发电机控制策略
逆变器采用虚拟柴油发电机控制策略可以很好地模拟柴油发电机的运行特性,从而提高其和柴油发电机组并联系统的稳定性。虚拟柴油发电机主要包括两部分:虚拟柴油发动机和虚拟励磁机控制器,本节主要对这两部分的工作原理以及控制器的设计进行介绍。
2.1 虚拟柴油发动机的设计
虚拟柴油发动机模拟的是柴油发动机调速系统的功能,当系统有功负荷发生变化导致转速发生变化时,调速系统通过计算实际转速与额定转速的差值控制汽门的开度,从而调节发动机输出的机械功率,实现新的功率平衡。按照柴油发电机调速系统的结构,虚拟柴油发动机可分为转速调节器、油门执行器和柴油发动机3个部分。下面介绍各个部分的工作原理及其数学模型,并在此基础上建立虚拟柴油发动机的控制模型。
转速调节器由转速传感器和控制器两部分组成,用于实现发动机转速的稳定。转速调节器的控制模型可以用一阶惯性环节来模拟,其传递函数如下所示:
(3)
式中:T1为转速调节器的惯性时间常数;Kp、Ki、Kd分别为PID控制器中的比例、积分和微分系数。
油门执行器的作用是接收转速调节器发出的油量给定信号,控制喷油泵向气缸内泵入定的油量,保证系统的稳定运行。油门执行器的控制模型可以等效为惯性放大环节,其传递函数如下所示:
(4)
式中:T2为油门执行器的惯性时间常数;K1为油门执行器的增益。
柴油发动机的作用是将燃料的化学能转化为机械能,并作为原动机向外输出机械转矩,拖动同步发电机发电,其传递函数如下所示:
(5)
式中:T3为柴油发动机的惯性时间常数;K2为柴油发动机的增益。
虚拟柴油发动机作为虚拟柴油发电机的调速系统,在运行过程中首先由下垂控制环节生成转速的参考值,而后将其与实际转速的差值依次经过转速调节器、油门执行器与柴油发动机模型后向外输出功率。虚拟柴油发动机的控制模型如图4所示。
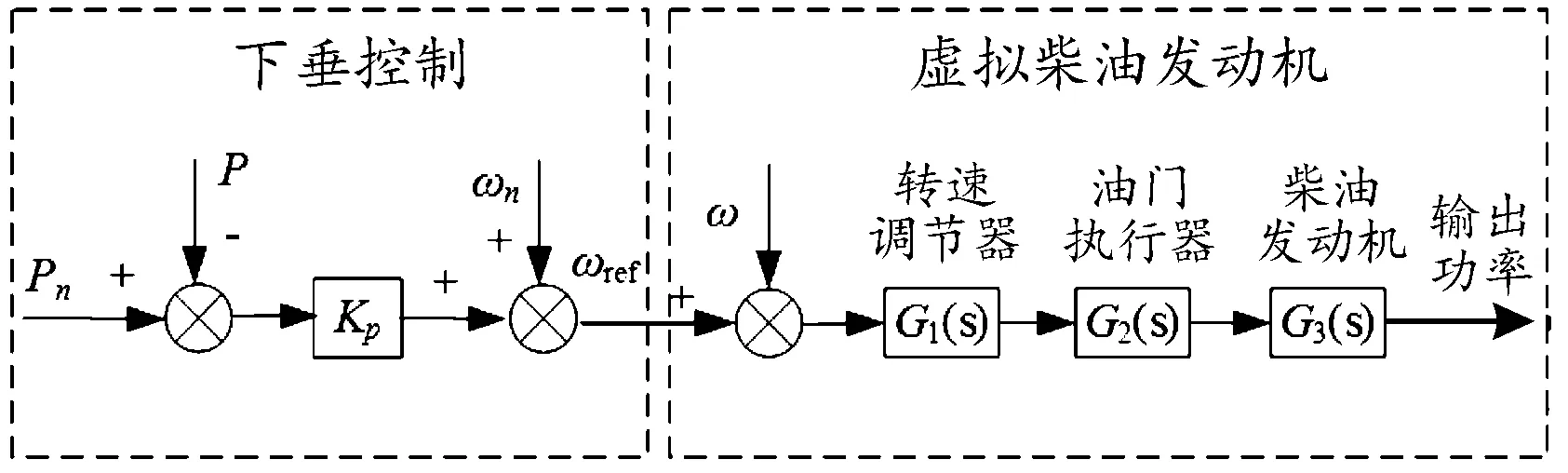
图4 虚拟柴油发动机控制框图Fig.4 Virtual diesel engine control block diagram
2.2 虚拟励磁机控制器的设计
柴油发电机中励磁系统的主要作用是保证端电压的稳定,具体工作过程为:当同步发电机的端电压发生变化时,励磁调压器(AVR)通过调节励磁电流来改变励磁电动势,进而保证端电压的稳定。虚拟柴油发电机中励磁机控制器的功能和柴油发电机中励磁系统的功能类似,保证输出端电压的稳定。对照柴油发电机的励磁系统,虚拟励磁机控制器可分为以下3个部分:电压检测环节、反馈控制环节以及励磁电压稳定环节。
电压检测环节主要是检测输出端电压的幅值,配合无功下垂环节生成系统电压的参考值,该过程存在延迟环节。其值可由式(6)求得:
(6)
式中:Um为电压幅值;Ud和Uq分别为输出端电压在d轴和q轴上的分量;T4为延迟环节的时间常数。
反馈控制环节主要是对端电压的变化快速响应,缩短调整时间。此过程可以等效为惯性放大环节,传递函数如下所示:
(7)
式中:K3为反馈控制环节的放大系数;T5为时间常数。
励磁电压稳定环节主要是稳定输出端电压,减小超调量,缩短调整时间。该过程也可等效为惯性放大环节,传递函数如下:
(8)
式中:K4为放大系数;T6为时间常数。
虚拟励磁机控制器具体的工作流程是:首先由无功下垂环节得到参考电压Uref,再由电压检测环节得到电压幅值Um,而后将Uref与Um的差值经由反馈控制环节以及励磁电压稳定环节后得到电压E,稳定输出电压。其控制框图如图5所示。
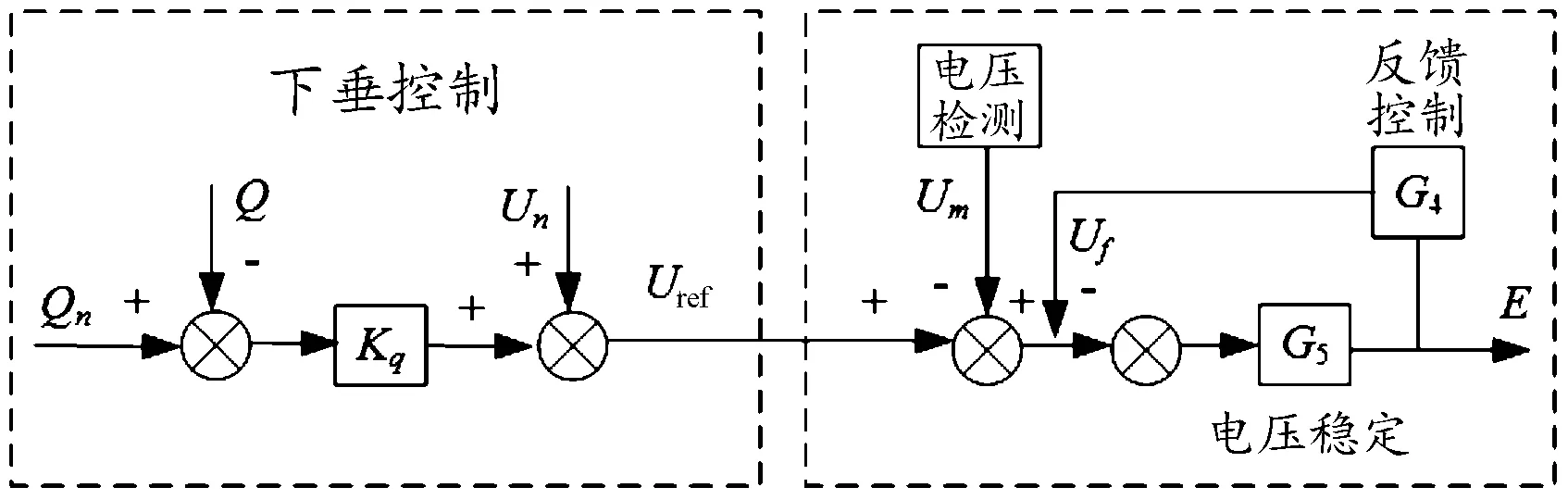
图5 虚拟励磁机控制器控制框图Fig.5 Control block diagram of virtual exciter controller
2.3 虚拟柴油发电机的整体控制策略
虚拟柴油发电机控制策略是在VSG控制策略的基础上提出的,由3.1和3.2建立的虚拟柴油发动机和虚拟励磁机控制器的模型可以看出:采用虚拟柴油发电机控制策略的逆变器可以更好地模拟柴油发电机组的输出特性,进而提高逆变器与柴油发电机组并联系统的稳定性。在图3中,将VSG控制策略中的虚拟原动机和虚拟励磁机替换为虚拟柴油发动机和虚拟励磁机控制器即可完成虚拟柴油发电机控制器的设计。
3 仿真验证
为验证虚拟柴油发电机控制策略的有效性,在Simulink中搭建逆变器与柴油发电机组的并联仿真模型,二者额定容量均为10 kW,仿真参数如表1、表2所示。
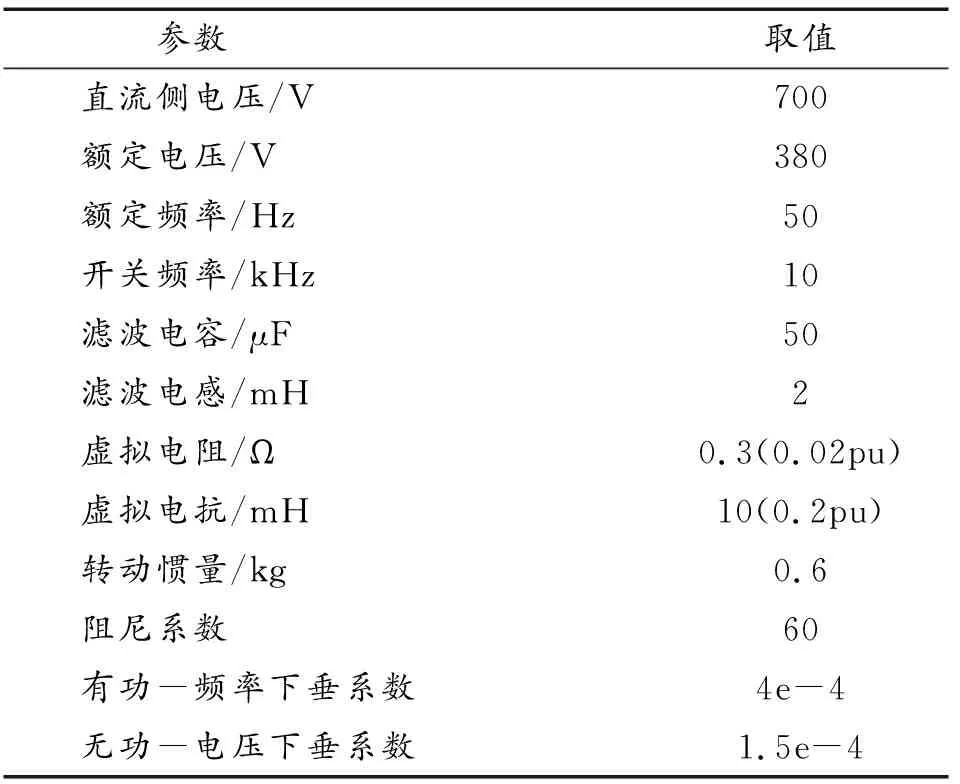
表1 逆变器控制参数Table 1 Inverter control parameters
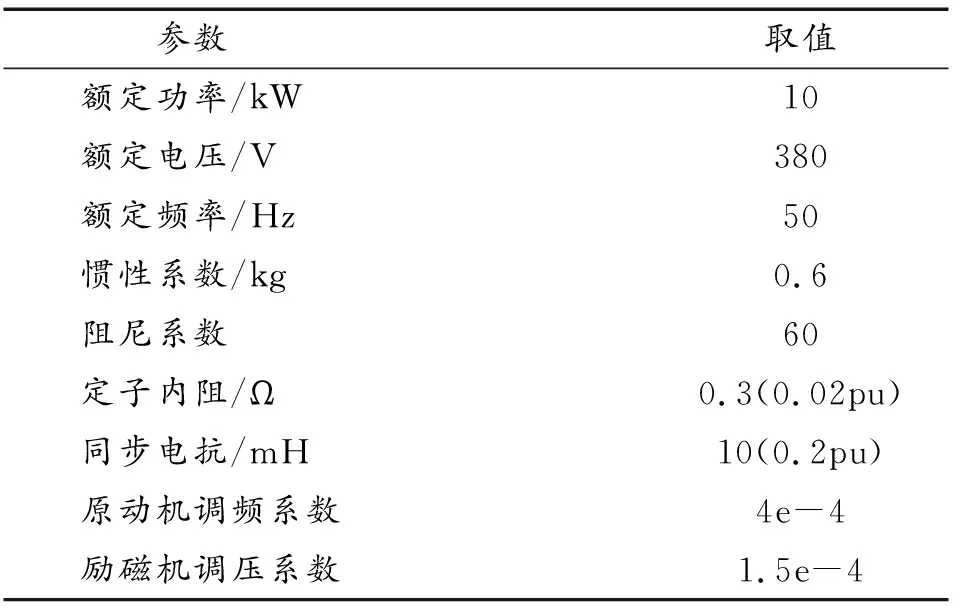
表2 柴油发电机组参数Table 2 Parameters of diesel generator set
3.1 2种控制方法输出特性与柴油发电机组比较分析
为验证逆变器采用虚拟柴油发电机控制策略的输出特性相比VSG控制策略更接近柴油发电机组的输出特性,仿真工况设置如下:新能源逆变器带4 kW的负载独立运行,初始仿真时间为3 s,在1 s时投入4 kW的负载,2 s时切除4 kW的负载,对比分析其分别采用VSG控制策略和虚拟柴油发电机控制策略的输出特性。
从图6和图7的输出频率和功率波形图可以看出:当负载投切时,采用虚拟柴油发电机控制策略的逆变器输出频率和功率的波形变化与发电机组的变化基本一致。仿真结果表明:采用虚拟柴油发电机控制策略的逆变器输出特性更接近柴油发电机组的输出特性。
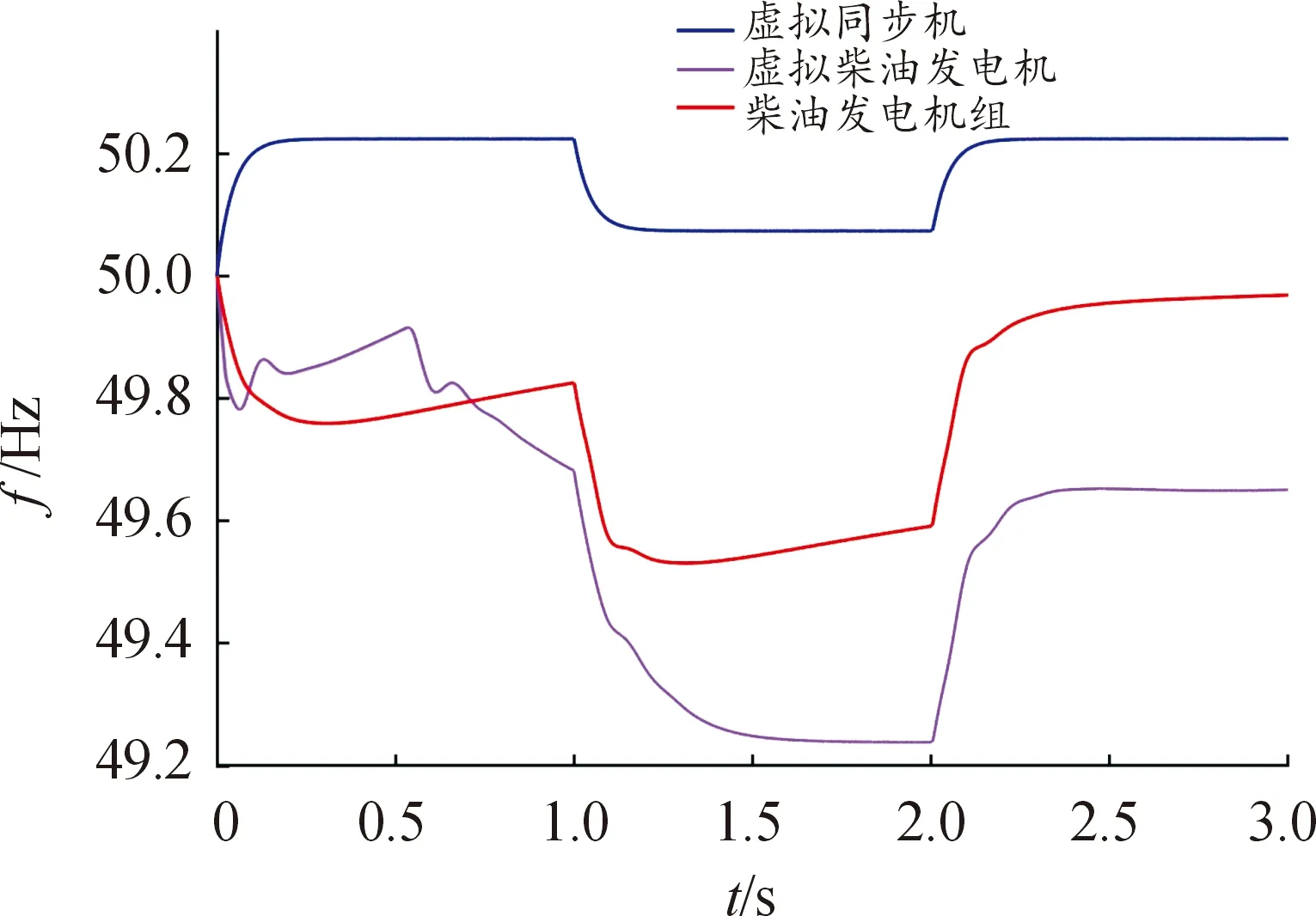
图6 输出频率波形Fig.6 Output frequency waveform
3.2 逆变器与柴油发电机组并联运行仿真分析
为验证逆变器采用虚拟柴油发电机控制策略可以和柴油发电机组稳定并联运行,并联运行工况设置如下:二者并联后带6 kW+2 kVar的负载运行,仿真时间为4 s。在1 s时投入8 kW+6 kVar的负载,3 s时切除该负载并投入4 kW+2 kVar的负载,观察逆变器和柴油发电机组输出的频率、有功功率、电压幅值和无功功率的波形。
由图8、图9逆变器和柴油发电机组输出的有功和无功功率波形图可以看出:采用虚拟柴油发电机控制策略的逆变器与发电机组并联运行时可以实现功率的均分。由输出频率和电压波形图可以看出:当负载投切时,逆变器输出频率和电压波形变化与发电机组基本一致,且动态性能较好,到达稳态时逆变器的频率和电压值略低于发电机组。
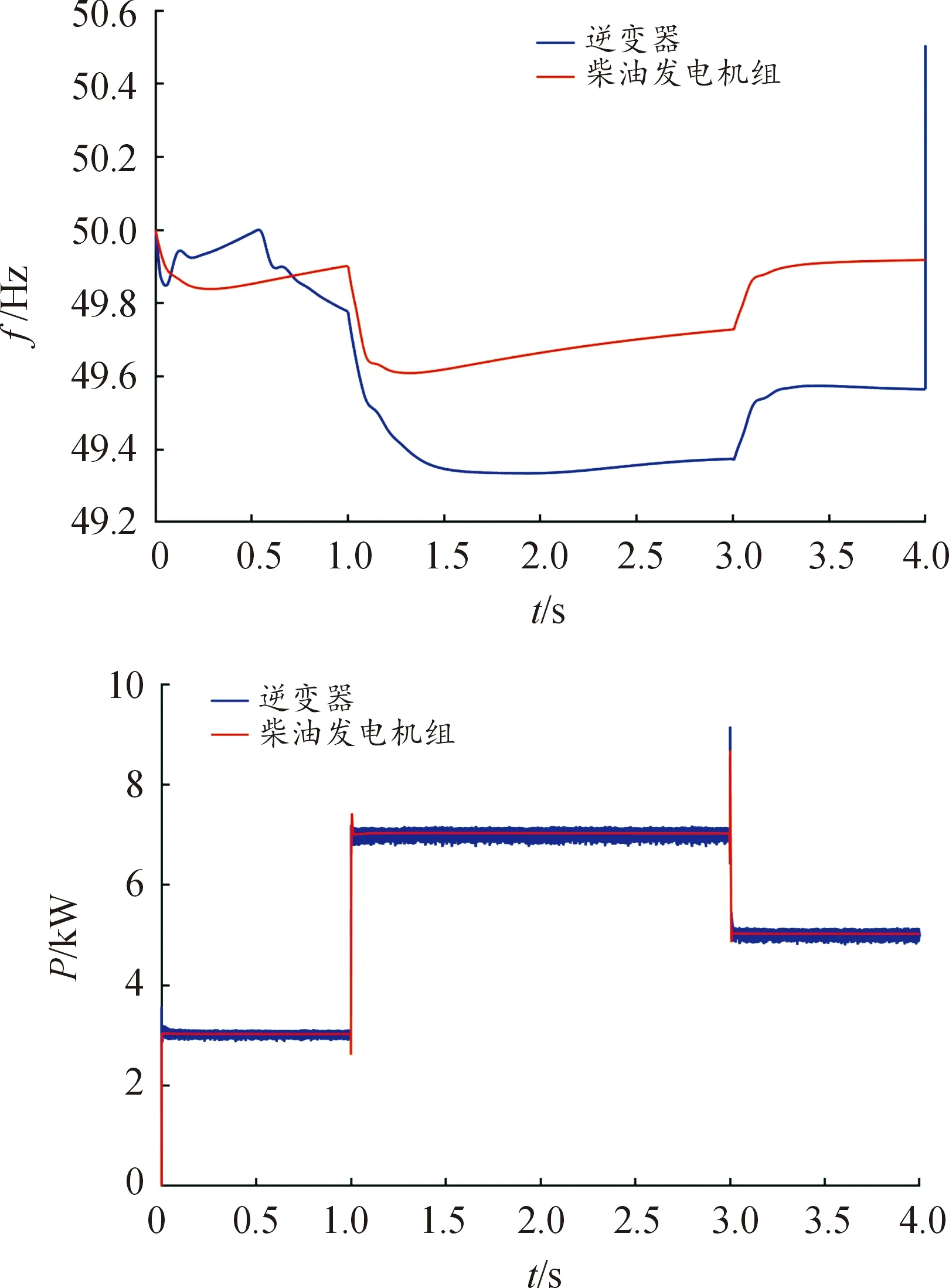
图8 输出频率-有功功率波形Fig.8 Output frequency-active power waveform

图9 输出电压-无功功率波形Fig.9 Output voltage-reactive power waveform
仿真结果表明:采用虚拟柴油发电机控制策略的逆变器和柴油发电机组并联运行时,可以实现功率的合理分配;当负载投切时,逆变器和发电机组的输出特性变化基本一致,二者可以稳定运行。
4 结论
1) 逆变器虚拟柴油发电机控制策略的输出特性相比虚拟同步机控制策略更接近柴油发电机组。
2) 采用虚拟柴油发电机控制策略的逆变器可以和柴油发电机组稳定并联运行,且功率可以合理分配。
3) 采用虚拟柴油发电机控制策略的逆变器在负载变化时频率和电压的变化率和调整时间要高于发电机组,如何使其动态性能和发电机组趋于一致还需进一步的研究。
猜你喜欢
天然气与石油(2022年4期)2022-09-21 01:45:22
机械工业标准化与质量(2022年6期)2022-08-12 02:07:00
核科学与工程(2021年4期)2022-01-12 06:29:42
大电机技术(2021年6期)2021-12-06 02:52:40
装备制造技术(2020年11期)2021-01-26 00:39:16
北京航空航天大学学报(2020年3期)2021-01-14 00:36:56
防爆电机(2019年1期)2019-01-25 07:02:04
水电站机电技术(2017年9期)2017-09-26 03:34:52
微特电机(2016年3期)2016-11-29 09:43:45
世界汽车(2015年10期)2015-09-10 23:18:21