现代农业领域中计算机视觉技术的运用与发展
2023-04-29 22:48:41秦昌友杨艳山顾峰玮陈盼阳秦维彩
中国农机化学报 2023年12期
秦昌友 杨艳山 顾峰玮 陈盼阳 秦维彩


摘要:计算机视觉是一个涉及使机器“看到”的领域。该技术使用相机和计算机代替人眼来识别,跟踪和测量目标以进行进一步的图像处理。随着计算机视觉的发展,这种技术在现代农业领域得到广泛的应用,并在其发展中发挥关键作用。首先,详细阐述计算机视觉的概念、组成部分和工作原理。其次,介绍国内外计算机视觉技术在水产养殖、畜牧养殖、农作物生长监测、农作物病虫害监视、果蔬识别定位与采摘等领域的研究进展与应用情况。通过分析发现,现有技术可以促进现代农业自动化发展,实现低成本、高效率、高精度的优势。然而,未来技术将继续向现代农业新的应用领域拓展,需要克服的技术问题会更多。最后,系统总结和分析计算机视觉技术在现代农业的应用与挑战,探讨未来的机遇和前景,为研究者提供最新的参考。
关键词:计算机视觉;图像处理;现代农业;自动化
中图分类号:S-1
文献标识码:A
文章编号:20955553 (2023) 12011910
Application and development of computer vision technology in modern agriculture
Qin Changyou1, Yang Yanshan1, Gu Fengwei2, Chen Panyang3, Qin Weicai1
(1. Suzhou Polytechnic Institute of Agriculture, Suzhou, 215008, China; 2. Nanjing Institute of Agricultural
Mechanization, Ministry of Agriculture and Rural Affairs, Nanjing, 210014, China; 3. Nanjing Institute of
Technology, Nanjing, 211167, China)
Abstract:
Computer vision is a field that involves enabling machines to “see”. This technology uses cameras and computers instead of human eyes to identify, track, and measure targets for further image processing. With the development of computer vision, this technology has found widespread applications in modern agriculture and has played a crucial role in its advancement. Firstly, the concept, components, and working principles of computer vision are detailed. Secondly, the research progress and applications of computer vision technology in areas such as aquaculture, livestock farming, crop growth monitoring, crop pest surveillance, and fruit and vegetable recognition, positioning, and harvesting are introduced both domestically and internationally. Through analysis, it is found that existing technology can promote the development of modern agricultural automation, realizing advantages of low cost, high efficiency, and high precision. However, future technologies will continue to expand into new application areas in modern agriculture, bringing about more technical challenges that need to be overcome. Finally, the paper systematically summarizes and analyzes the applications and challenges of computer vision technology in modern agriculture, discussing future opportunities and prospects, providing the latest references for researchers.
Keywords:
computer vision; image processing; modern agriculture; automation
0 引言
人工智能分支了许多领域,其中之一就是计算机视觉,其在各种领域的应用都在增长。从未来的发展前景来看,农业部门是计算机视觉领域一个有前途的应用空间。在20世纪70年代末,计算机视觉技术才开始应用于农业生产中。最初期其应用范围多为对植物进行鉴别,以及对农产品的品质进行检测和分级等[1]。经过多年的发展,目前已经广泛应用在现代农业的发展中,如水产养殖、畜牧养殖、设施装备、农作物生长监测、农作物病虫害监视、果蔬识别定位与采摘等领域。本文主要介绍了计算机视觉技术的基本工作原理以及系统组成,回顾近年来计算机视觉技术在农业生产领域中的应用,同时简述了目前计算机视觉技术在现代农业生产应用中仍然存在的问题以及未来的发展形势[2]。
1 计算机视觉概述
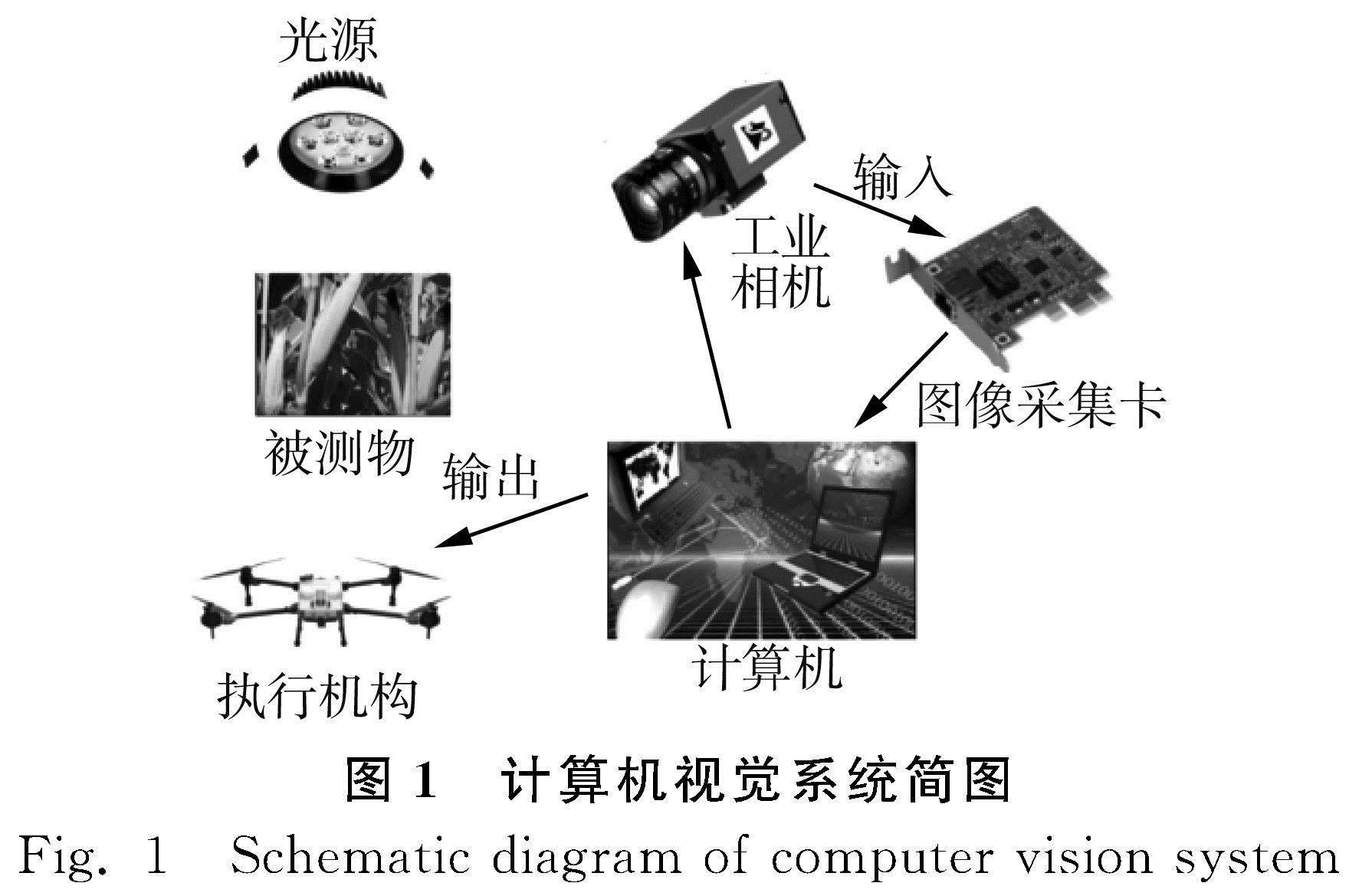
自从计算机视觉技术出现以来,已经为多个行业解决问题的技术手段并在实际应用中取得不错的效果[3]。计算机视觉也称机器视觉,通过计算机模拟人类视觉识别外界图像,提取信息进行分析判断。其基本原理是先通过传感器来获得目标物的图像信号,然后图像处理系统根据图像的特征将图像信号转变成数字信号,最后使用各种运算和处理将这些信号转变成目标物的特征信息,由此实现对目标物的检测、识别和控制等。机器视觉系统基本上由三个元素组成:捕获、处理和输出,其简图如图1所示[4]。通过各终端之间的联系,机器视觉技术能够很好地进行工作,最终会得到一些数字信号,然后将数字信号经过处理就能够转换成图像[5]。
计算机视觉技术包含单目视觉技术和双目立体视觉技术等,单目视觉是用一个相机来拍摄从而获取物体的二维信息。因为它只有一个视角,没有其他的视角来做辅助计算,依赖于训练和深度学习的方法,因此需要庞大的训练集。双目立体视觉是模拟人眼从两个不同角度观察场景的方式,像人的眼睛能看到三维的物体,获取物体长度、宽度和深度的信息,通常使用两个距离相隔较短的相机同时捕获场景[6]。其基于三角测量原理,一个点的3D信息可以通过其从两幅图像中的视觉差异来获得。在做视觉slam的时候,不管是单目视觉技术,还是双目立体视觉技术,都有自己的优点和缺点,不能一概而论,要根据实际情况来选择合适的视觉slam。双目相机进行三维重建的几何形状如图2所示。
场景中的一个点(X,Y,Z)与它在两个摄像机坐标中的对应点(ul,vl)和(ur,vr)之间的关系如式(1)、式(2)所示。
式中:
Ml——左侧摄像机投影矩阵;
Mr——右侧摄像机投影矩阵。
方程(1)和方程(2)用同质坐标表示,如式(3)所示。
因此,可以使用伪逆法重构三维点X,如式(4)所示。
X=(ATA)-1ATB(4)
在两台相机的光轴平行的情况下(平行光轴双目相机),点X可以简单地通过差距d计算出来。
式中:
b——基线距离。
2 计算机视觉技术在现代农业中的应用
与人类视觉相比,机器视觉技术具有很多优点,在智能制造领域应用集中在识别、测量、定位和检测。而在农业生产环节中应用更为广泛,如水产养殖,畜牧养殖,农产品检测和分类,农作物生长监测,果蔬识别与采摘,农作物病虫害监视等,利用机器视觉技术可以提高生产率,实现农业生产与管理的自动化和智能化。在美国、日本、德国等发达国家围绕农业生产的应用几乎涉及全过程,各种基于机器视觉的田间农机装备被设计出来代替人类从事繁重的田间作业,利用机器视觉技术实现生产过程的数字化处理,使生产过程更加客观和标准[7]。在中国,机器视觉在现代农业中的应用主要集中在农产品的检测和分类上,如水果表面缺陷、水稻外观以及农作物中农产品和杂草的识别等领域[8]。
2.1 计算机视觉技术在养殖行业中的应用
2.1.1 计算机视觉技术在水产养殖中的应用
目前水产养殖是最有前途的渔业市场,53%的产品供人类消费,超过渔业的47%。鱼群健康状况是水产养殖的核心,科学管理监测鱼类的生长条件和行为将减少由于疾病造成的经济损失。传统检测方法费时费力,不及时监测容易导致水产养殖事故。近年来伴随着我国5G通信、物联网和传感器等技术的不断发展,传统检测鱼群健康状况的手段正在被基于计算机视觉技术的自动化检测方法所逐渐替代[910]。
机器视觉技术已广泛应用于渔业,它将收集的信息提供给计算机进行分析和决策,检测结果可用于分析鱼类行为、体重、长度、数量,并确定鱼类种类。在过去的二十年中,已经提出了许多基于机器视觉的水产养殖技术[11]。如针对在进行鱼类识别时所遇到光照强度不同、背景发生变化以及不同物种在视觉上具有相似性等方面的问题,丁顺荣等[12]提出一种新的基于多特征相结合及粒子群优化SVM的鱼类分类方法。试验结果表明,该方法在不同属鱼类和同属鱼类的分类中准确率分别为94.7%、63.6%。为了获取鱼群在水下的动态感知信息和实现对其无损检测,李艳君等[13]提出立体视觉下动态鱼体尺寸测量方法。试验结果表明,与人工测量结果相比,鱼体长度和宽度的平均相对误差分别为4.7%和9.2%左右。饲料浪费一直制约着水产养殖的发展。Cao等[14]提出了一种基于机器视觉的水产养殖残余饲料计数算法,试验结果表明,在浑浊水和进料附着力的条件下,相对误差仍能保持在10%左右。在水产养殖中,投饲技术决定了饲料转化率和成本。但是现有喂料装置的智能化程度并不是很高,无法根据鱼的食欲自动改变饲料量。Zhou[15]设计了一种基于机器视觉和进料行为的送料控制器。试验结果表明,与传统的喂料机相比,设计的控制器更加智能,可以减少饲料浪费。为了对鱼群由于外部或内部因素的变化而产生的异常行为进行监控与报警,关辉等[16]提出一种基于机器视觉的智能鱼群健康状况监测系统。通过无线传感网监测鱼塘的水质情况、摄像头监测鱼类的行为。采用运动目标跟踪算法建立鱼群游动信息与健康状况的模型,从而实现对起鱼类健康状况的实时监测。为了建立比目鱼面积与重量的相关性,Hwang等[17]基于机器视觉对比目鱼模型进行图像处理。使用参考方程获得与模型长度相对应的实际鱼的重量,然后进行回归分析以推导出线性方程和功率方程的插值,这些方程显示了比目鱼的面积和重量之间的相关性。为了构建鱼苗自动计数系统,Ji等[18]基于机器视觉技术提出一种基于概率密度函数的匹配算法和动态计数策略。试验结果表明,通过不同鱼类和数量的数据集验证了该算法的有效性和鲁棒性,平均计数准确率高于97.9%。传统的鱼苗计数都是手工计算,需要大量的人力。黎袁富等[19]研究基于YOLOX鱼苗的识别和计数进行了研究。结果表明,YOLOX和YOLOv3在少量鱼苗中的检测结果具有很高的准确性,其识别的准确率和召回率都超过93.00%;当鱼苗数量较多时,YOLOX鱼苗的识别准确率和召回率分别为96.99%、97.38%,比YOLOv3分别提高了1.19%和5.38%。
在大规模集约化水产养殖中,环境的复杂性使得图像采集变得困难,因此,可用于鱼类研究的公共数据集相对较少。此外对于试验结果的分析,研究人员使用不同的数据集,由于每个数据集都有不同的数据样本量,这使得评估不同算法或分类器的性能变得困难。因此,未来研究人员必须统计更多鱼类种类、获得更高图像质量的公共开源数据集。
2.1.2 计算机视觉技术在畜牧养殖中的应用
随着智慧畜牧业的发展,牧场的管理逐渐变得数字化和智能化。动物的进食、饮水、排泄等行为对于确定它们是否健康很重要。近年来计算机视觉的不断发展,利用计算机视觉技术在图像处理方面的优势,通过格拉米安角场将一维活动数据转换为三维图像,并利用深度学习,将生成的图像发送到MCNN,可以实现畜牧业中的精确个体识别,且具有良好的可靠性和稳定性,在动物行为方面具有很大的优势,基于计算机视觉的精准畜牧系统流程如图3所示。
基于机器视觉技术的畜牧业能够使用5G通信和传感器等技术管理畜群。将传感器和设备与智能软件相结合,提取关键的农业信息,然后提供管理策略,使农民能够自动监测动物,以改善动物健康、产量和环境影响。为实现对猪的高效识别,金耀等[20]提出一种基于机器视觉的生猪个体识别方法。采用基于YOLO v3的识别模型,并与Faster RCNN和SSD模型识别结果进行比较,试验结果表明:基于YOLO v3模型对小猪仔和母猪的识别准确率分别为95.99%、96.00%,召回率分别为84.09%、96.00%。Kashiha等[21]探讨一种在实验条件下自动识别猪圈内标记猪的可行性,并利用图像处理进行行为相关研究。试验结果表明,采用椭圆拟合算法对猪进行定位,猪的平均准确率为88.7%,所提出的技术还可以来监测诸如休息之类的行为。Ahrendt等[22]研究了一个实时计算机视觉系统,用于跟踪散养在猪圈中的猪。在实验室和猪圈中进行地试验证明了该系统的稳健性:可以在较长的时间跨度内(超过8min)跟踪至少3头猪,而且不会在试验中失去对个别猪的跟踪和识别。为了控制猪在出栏时的体重差异,张建龙等[23]基于LabVIEW开发平台和机器视觉技术开发了育肥猪分群系统,试验结果表明:该系统可以在代替人工调栏的同时控制猪的体重差异。Nasirahmadi等[24]利用二维成像系统以及深度学习方法来检测猪的站立和躺卧姿势。试验结果表明,R-FCN ResNet101方法能够检测出卧姿和站姿,对站姿、侧卧和腹卧的平均精度分别为0.93、0.95和0.92。肉鸡胴体淤血是一种品质异常现象,给屠宰企业带来较大的经济损失。赵正东等[25]采用三方位视觉采集(搭载三光源)系统,搭建了一套肉鸡胴体图像采集装置,研发了一种基于胴体子图像局部颜色矩信息训练支持向量机模型结合相似性度量的技术方法。有效识别胴体淤血,实现视场对肉鸡胴体的全覆盖。为了实现对羊群数量的自动计数,尚绛岚[26]基于双线计数法,采用了YOLOv3目标检测算法与DeepSORT跟踪算法相结合的方式。结果表明:改进的YOLOv3检测算法对羊群头部数据集的检测精度为90.12%;YOLOv3+DeepSORT跟踪算法对羊头部目标进行跟踪比DeepSORT跟踪算法成功率提高了11.77%,中心点误差降低了1.43%。为了解决在限制栏条件下,对母猪的发情行为认识过度依赖公猪和人工查情的低效问题。薛鸿翔等[27]提出了一种基于改进YOLO v5s算法的母猪发情行为识别方法。试验结果表明:深度学习法对母猪和仿生公猪交互行为的识别和检测的平均准确率为97.8%;以20s为判断标准,其发情误差率为10%。白强等[28]提出SEPH-YOLOV5s模型对奶牛行为进行识别,以解决奶牛群体行为数据复杂、目标尺度变化大、行为多样等因素对奶牛行为识别的影响。试验结果表明:与YOLOV5s模型相比,改良的SEPH-YOLOV5s模型的识别准确率平均值比YOLOV5s提高了1.2个百分点,识别奶牛多尺度行为的平均精度均值提高了0.8个百分点,对奶牛行走识别的准确率为4.9个百分点。
模型始终是开发强大的计算机视觉系统的核心关注点之一。尽管许多先进的基于CNN的计算机视觉系统被应用于畜牧养殖。但只有少数研究探索了使用经过训练的CNN架构进行畜牧养殖的有用信息,大多数研究主要集中在评估模型性能上[29]。由于单一学科的知识、时间和资源的限制,畜牧管理策略仍未得到改进。计算机视觉系统的丰富研究和应用需要多学科合作,以协同农业工程、计算机科学和畜牧科学领域的专业知识,以增强视觉系统并改进畜牧行业的精确管理策略。
2.2 计算机视觉技术在农作物中的应用
2.2.1 计算机视觉技术在农作物生长监测中的应用
机器视觉作为植物生长建模最重要的技术之一,其无损测量研究对加快农作物生长监测具有重要意义[30]。根据精准农业的理念,作物在生长阶段的状态是作物栽培任务和管理的重要信息。每个生长阶段的作物生长信息是最佳栽培管理的最重要指标之一。根据作物生长和作物健康状况,在精准农业中可以确定肥料和化学品的数量和品种。作物的生长状况受遗传性状和环境的综合影响,因此可以用形态特征参数和生理机理指数来表示。传统方法获取形态特征参数和生理机理指标有局限性。最近,利用机器视觉系统进行连续快速无损测量的研究变得引人注目,基于计算机视觉的植物养护系统流程如图4所示。
基于机器视觉技术的作物生长监测利用图像和视频技术采集作物的外观特征(如叶子、芽、果实),并据此诊断成熟度、水分和养分缺乏等农艺指标。为实现苹果树叶片氮含量的快速无损检测,刘双喜等[31]利用图像处理方法,提取新梢叶节距这项植物形态学特征。建立出苹果树叶片氮含量检测模型。试验验证,建立的随机森林检测模型决定系数为0.8386,均方根误差为2.3769。为了在温室中对番茄幼苗生长过程进行无损测量,Sun等[32]基于无损检测图像和图像处理算法获得番茄幼苗的叶面积。通过分析对比基于机器视觉的测量与人工测量的结果,叶面积的最佳相关系数为0.9822,表明该算法可用于番茄幼苗的无损测量。McCarthy等[33]开发了一个机器视觉系统,在相机视野内的多个地块中跟踪植物高度。还利用颜色分割法识别出在每个地块的树冠表面的萌芽、树冠覆盖率和开花状态。对16个玉米和大豆地块进行了试验评估,并在一天内检测出玉米开花日期、大豆高度和玉米高度等信息。Setyawan等[34]使用机器视觉方法进行农作物生长状况的监测,采用绿色通道Otsu过滤来检测作物的生长速度。试验结果表明,所提出的方法能够监测植物的生长。为了获得番茄作物最佳产量,了解光照、温度、养分、水等环境因素的关系以及与作物生长状态的关系非常重要。Loresco等[35]采用图像处理技术将番茄的生长阶段确定为叶期、开花和结果。使用具有真阳性率和假阴性率的混淆矩阵以及ROC来评估所开发的决策支持系统。试验结果表明,在测定试验番茄图像的生长阶段方面具有较高的性能。
作物生长发育过程中养分吸收的变化会引起植物外观、叶片颜色和质地的变化。可以利用计算机视觉收集植物发育信息,用于园艺系统控制、生物传感器技术收集和作物发育过程监测的管理。随着计算机成本的不断降低,视觉和图像处理技术可以实现连续和非破坏性的监测,具有巨大的应用潜力。
2.2.2 计算机视觉技术在农作物病虫害监视中的应用
农作物最终的产量和品质会受到其在生长过程中由于病害侵袭而产生严重的影响,因而在作物病害防治中需要进行病害识别和诊断[36]。植物病害由于致病种类不同,可产生病灶、孔洞等形状、大小、颜色和质地不同的症状。病害症状的特征直接反映了作物所患病害的类型和病害造成的危害程度。很多时候,在偏远地区并不容易请到能够根据症状识别疾病的研究人员和专家。计算机视觉是处理这个问题的关键,在使用图像识别技术对疾病图像进行预处理后,提取出疾病图像的颜色,纹理和形态,使用有效的特征组合能正确和定量地对疾病进行分类,基于计算机视觉病虫害诊断过程如图5所示。
在农作物的大规模种植中,作物的早期预防非常重要。如果不能提前预警,很可能造成大规模的病理变化和财产损失。为更快速、更精确识别美国白蛾幼虫网幕位置,魏晨等[37]以美国白蛾幼虫网幕为靶标提出一种基于图像阈值化和改进卷积神经网络相结合的网幕图像自动化识别算法。试验表明:网幕识别的准确率达到95%以上,单幅图像的识别时间在200ms左右。Nancy等[38]提出一个农业图像实时分类的框架。使用此系统,作物病害图片分类和疾病预测变得更加容易,自动叶病诊断系统利用计算机视觉、图像处理和机器学习算法来分析受感染的叶病照片并预测病害,以提供准确的诊断。晚疫病是马铃薯的一种严重病害,可造成减产甚至绝收。党满意基于机器视觉技术对马铃薯叶部晚疫病进行检测,进行马铃薯晚疫病的识别耗时最长为9s,最短为3s[39]。为实现精准施药,提高油菜的产量和品质。王珊提出一种基于HSV颜色空间的病斑面积占比方法。试验表明,该方法能够有效地对叶片和茎秆的病害程度进行分级,其识别准确率分别为94.25%和92.5%[40]。Zhang等[41]针对玉米常见病虫害、灰斑、褐斑,利用计算机视觉技术和支持向量机建立玉米灰斑、褐斑识别模型。仿真结果表明,该模型能够有效识别玉米灰斑和褐斑,病害识别正确率达到86.1%[49]。Hua等[42]提出一种基于机器视觉的作物表面多特征决策融合疾病判别算法(PD R-CNN)。研究结果表明,PD R-CNN在病虫害发生过程中,花叶病监测准确率为88.0%,根腐病监测准确率为92.0%,白粉病监测准确率为88.0%,蚜虫监测准确率为86.0%。Agnihotri[43]为了实现识别水稻中存在的常见害虫。通过使用微处理器以及红外摄像头和普通摄像头对田间可用的害虫进行分类,该摄像头将连接到飞越田地并识别害虫的四轴飞行器上。能够识别大型害虫,如老鼠,蛇,猫鼬,蜘蛛,它也成功地识别了小害虫,如螟虫,绿叶蝉,褐稻虱、白背稻虱、稻纵卷叶螟、粘虫等,减少了识别害虫的大量时间和人力。为实现苹果病害的快速、准确的鉴定。孙丰刚等[44]利用GHTR2-YOLOv5s技术和迁移学习技术提高模型收敛速度和精度。试验结果表明:GHTR2-YOLOv5s模型的参量值只有2.06MB,检测速率为0.065s/张,比YOLOv5s高2.5倍,模型综合推理mAP0.5可达0.909。
以上研究了利用机器视觉识别作物表面植物病虫害的情况。但目前这些方法识别类型并不丰富,模型升级空间小,不方便区分新病虫害。尽管基于机器视觉技术在控制害虫和植物病害领域发展迅速,但大多数现有方法是在受控环境条件下捕获的公共数据集上显示出其有效性,尚未探索其对现场植物病害检测的能力。另一方面,大规模现场公共数据集的稀缺性是开发适用于各种植物病害的解决方案的主要瓶颈之一[45]。
2.2.3 计算机视觉技术在果蔬识别定位与采摘的应用
果蔬采摘作为农业生产链的一个至关重要的作用,其主要是一种手工和高度劳动密集型的工作,需要在一年中非常特定的时间提供采摘者团队。由于劳动生产率、拣选效率、成本等的提高,采摘与拣选机器人在果蔬生产领域得到了广泛的应用[46]。发展机械化、智能化收获技术,研究开发基于机器视觉的果蔬识别定位与采摘机器人具有重要的意义[47]。
随着时间的推移,世界上大多数国家都通过机器视觉技术开发了智能采摘机器人来装卸农产品并检测水果和定位问题。针对目前一些识别设备体积大、成本高等问题,陈品岚等[48]提出一种基于树莓派及SSD的柑橘识别系统,通过机器视觉采集柑橘树的相关数据,对柑橘树上的柑橘进行识别及计数。试验结果表明:在训练次数为5、40、70、100次的情况下,其准确率分别为57.4%、71.5%、85.2%、92.4%。水果识别和定位是水果采摘自动化的核心问题。Yin等[49]基于Faster R-CNN模型对自然环境中生长的橙子进行了检测和识别,实现更高的检测精度和速度。为了获取多个目标荔枝串的空间位置信息,陈燕等[50]研究了大视场下荔枝采摘机器人的视觉预定位方法。试验结果表明,基于双目立体视觉的荔枝串预定位方法在3m的检测距离下预定位的最大绝对误差为36.602mm,平均绝对误差为23.007mm,平均相对误差为0.836%。Wang等[51]提出了一种基于机器视觉的智能采棉机器人(ICPR)设计,研究了一种基于色差的优化分割算法。结果表明,对棉花的识别精度较高,有助于提高采摘速度。为了解决番茄由于其非标准球形、多果重叠和茎叶遮挡等导致识别准确率低问题。冯俊惠等[52]设计一种视觉系统的成熟果实识别的Hough圆变换算法。试验结果表明,该算法对存在不同成熟周期的番茄果实识别率为87.5%、茎叶遮挡果实识别率为85%、多果重叠识别率为84.8%,三种情况同时存在的平均正确识别率为86.3%,平均运行时间为398ms。对作物进行准确识别和精准定位,是实现株间除草的技术关键和难点。马志艳等[53]以苗期玉米为研究对象,提出了一种通过视觉技术对玉米幼苗进行识别与定位的方法。试验结果表明,不同杂草分布量的玉米幼苗识别率为98.3%,定位误差距离在10mm以内的定位精准度为85.9%。吕晓莲等[54]通过对基于机器视觉的识别和定位方法,研究不同条件下采摘西红柿的识别图,试验结果表明,成熟果实的鉴定可以达到98%,定位误差可以控制在15mm以内。针对马铃薯芽眼检测精度不高、实时性差的问题,陈志伟[55]采用YOLOX技术进行了马铃薯种薯芽眼的识别,试验结果表明,该方法的平均准确率均值高达98.19%,准确率为92.39%。此方法可以极大地提高马铃薯种薯芽眼的识别速度和准确率。针对果树运输系统中存在的障碍物和树干探测精度问题,Su等[56]提出一种基于YOLOv5s的改进算法来检测果树的树干和障碍物。将SE模块添加到YOLOv5s网络中,利用K均值聚类算法对其进行了训练。与YOLOv5s模型相比,该模型的平均检测准确率提高了1.30%,平均检测时间缩短了2ms。
当田间环境的光照和遮挡条件下作物环境不同时,会影响识别和定位精度。此时应用几何特征、图像特征、新的图像算法和智能决策理论来解决问题。此外由于农业环境的复杂性和不确定性,视觉系统在应用中仍然存在较大的定位误差,而这些误差的规律难以描述和补偿。因此,需要结合机器人的控制系统和创新设计的机构来提高视觉和机械容错技术,实现精确的定位和操作[57]。
3 计算机视觉技术优势及未来展望
图像在人类感知中起着非常重要的作用。然而,人类的感知仅限于电磁波谱的可见波段。机器视觉检测技术可以覆盖整个电磁波谱,从伽马射线到无线电波。通过强大的视觉传感器,巧妙设计的光传输方法和图像处理算法,机器视觉可以完成许多人类视觉无法完成的任务。此外,机器视觉相较于人类视觉在工业应用中还有许多优势,如表1所示。
近年来,机器视觉技术越来越多地用于农业研究中,取得了一定的研究成果,并在实际生产中得到了应用,但仍存在一些挑战。
3.1 图像处理的算法
分割是图像处理的第一步,是特征提取和图像分析的前提。 然而,在不同光照条件下,常用的算法往往会失效。此外,水果的颜色类似于某些植物的叶子颜色(如黄瓜),植物本身含有果实、叶子和茎使得目标物被遮挡。所有这些因素都对现有的分割算法提出了新的挑战[58]。此外,目前大多数研究都是针对静态图像处理。但在农业领域,有许多情况需要实时的视频处理,如农业车辆的导航和动物行为的监控。因此,未来对实时识别算法的要求更高。
3.2 农业数据的支持
在所调查的研究中,机器视觉的应用需要经过不断的试验和大量的检测样本,其检测结果准确性取决于是否有大量的标准数据集来训练它。即使在相同的生长条件下,不同的植物也有不同的参数,所以单一植物的信息不具有代表性,不能作为决策的依据。此外,种植结构(垂直种植或平面种植)和环境的不均匀性(空气温度、湿度、光照)也会导致不同地区的植物生长条件不同。未来如何把这些因素都考虑进去,形成农业图像分析的标准数据集,准确显示出植物的真实生长状态,是促进机器视觉在现代农业发展的关键。
3.3 图像采集的硬件
目前有的图像是由数码相机手动拍摄的,这不可避免地造成了图像质量的不均衡。有的使用安装在机器人上的工业相机来拍摄图像,但防抖效果不佳。且相机的使用范围有限,其无法通过摄像头捕捉到在垂直空间生长的植物。从长远来看,作为视觉传感器,图像采集设备应该和其他传感器一样。需要创造一些精度高、适用性强、成本低的产品。还需要在工厂设计一些配套设备,以满足其不同应用场景[59]。
4 结语
从计算机视觉的基本理论和农业应用的角度出发,基于现代农业的五个领域,即水产养殖、畜牧养殖、农作物生长监测、病害监视、果蔬识别定位与采摘,探讨计算机视觉技术基础和应用热点,分析计算机视觉技术在未来农业自动化应用中将面临的挑战。
1) 计算机视觉技术具有低成本,高效率和高精度的优势,其作为一种新兴技术将更好地应用于农业。
2) 随着未来技术的不断拓展,为实现技术的通用性和协调性,有必要改进图像处理的算法、建立大规模的数据集、优化图像采集的硬件等。
3) 一个真正有价值的农业计算机视觉系统需具备实时性、鲁棒性和准确性。在实际研究中,应考虑各种因素,结合人工智能和自动控制学科的先进知识,在这个领域进行系统研究。
参 考 文 献
[1] 马彦平, 白由路, 高祥照, 等. 计算机视觉技术在农业生产中的应用与展望[J]. 中国农业资源与区划, 2009, 30(4): 21-27.
Ma Yanping, Bai Youlu, Gao Xiangzhao, et al. Application and expectation of computer vision technology in agriculture production [J]. Chinese Journal of Agricultural Resources and Regional Planning, 2009, 30(4): 21-27.
[2] 赵娜, 赵平, 高轶军. 机器视觉技术在我国现代农业生产中的应用研究[J]. 天津农学院学报, 2015, 22(2): 55-58.
Zhao Na, Zhao Ping, Gao Yijun. Study on application of machine vision technology to modern agriculture in China [J]. Journal of Tianjin Agricultural University, 2015, 22(2): 55-58.
[3] 李娟, 朱学岩, 葛凤丽, 等. 基于计算机视觉的水下海参识别方法研究[J]. 中国农机化学报, 2020, 41(7): 171-177.
Li Juan, Zhu Xueyan, Ge Fengli, et al. Research on under water sea cucumber identification based Ion computer vision [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(7): 171-177.
[4] 周航, 杜志龙, 武占元, 等. 机器视觉技术在现代农业装备领域的应用进展[J]. 中国农机化学报, 2017, 38(11): 86-92.
Zhou Hang, Du Zhilong, Wu Zhanyuan, et al. Application progress of machine vision technology in the field of modern agricultural equipment [J]. Journal of Chinese Agricultural Mechanization, 2017, 38(11): 86-92.
[5] 石卫坤, 彭森. 计算机视觉技术在农业生产中的应用与展望[J]. 农家参谋, 2019(19): 23.
[6] 殷悦, 张慧春, 郑加强. 基于双目立体视觉的植物三维重建系统[J]. 中国农机化学报, 2021, 42(3): 129-135.
Yin Yue, Zhang Huichun, Zheng Jiaqiang. Three dimensional reconstruction system of plant based on binocular stereo vision [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(3): 129-1335.
[7] 杨涛, 李晓晓. 机器视觉技术在现代农业生产中的研究进展[J]. 中国农机化学报, 2021, 42(3): 171-181.
Yang Tao, Li Xiaoxiao. Research progress of machine vision technology in modern agricultural production [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(3): 171-181.
[8] 郝文影. 计算机视觉技术在农业上的应用[J]. 现代农村科技, 2018(3): 92.
[9] 段延娥, 李道亮, 李振波, 等. 基于计算机视觉的水产动物视觉特征测量研究综述[J]. 农业工程学报, 2015, 31(15): 1-11.
Duan Yane, Li Daoliang, Li Zhenbo, et al. Review on visual characteristic measurement research of aquatic animals based on computer vision [J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(15): 1-11.
[10] Li D, Du L. Recent advances of deep learning algorithms for aquacultural machine vision systems with emphasis on fish [J]. Artificial Intelligence Review, 2021, 55(5): 1-40.
[11] Daoliang Li, Qi Wang, Xin Li, et al. Recent advances of machine vision technology in fish classification [J]. ICES Journal of Marine Science, 2022, 79(2): 263-284.
[12] 丁顺荣, 肖珂. 基于粒子群优化SVM和多特征融合的鱼类分类方法研究[J]. 中国农机化学报, 2020, 41(11): 113-118, 170.
Ding Shunrong, Xiao Ke. Improving fish classification method in particle swarm optimization SVM and multi-feature fusion [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(11): 113-118, 170.
[13] 李艳君, 黄康为, 项基. 基于立体视觉的动态鱼体尺寸测量[J].农业工程学报, 2020, 36(21): 220-226.
Li Yanjun, Huang Kangwei, Xiang Ji. Measurement of dynamic fish dimension based on stereoscopic vision [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(21): 220-226.
[14] Cao J, Xu L. Research on counting algorithm of residual feeds in aquaculture based on machine vision [C]. 2018 IEEE 3rd International Conference on Image, Vision and Computing, 2018: 498-503.
[15] Zhou C, Lin K, Xu D, et al. Computer vision and feeding behavior based intelligent feeding controller for fish in aquaculture[C]. Proceedings of the International Conference on Intelligent Agriculture, 2017: 113-122.
[16] 关辉, 许璐蕾. 基于机器视觉的智能鱼群健康状况监测系统[J]. 物联网技术, 2019, 9(10): 13-14, 17.
[17] Hwang K H, Choi J W. Machine vision based weight prediction for flatfish[C]. 2018 18th International Conference on Control, Automation and Systems, 2018: 1628-1631.
[18] Ji D, Zhou J, Xu M, et al. Automatic counting algorithm of fry based on machine vision system [C]. 2021 WRC Symposium on Advanced Robotics and Automation (WRC SARA), 2021: 104-109.
[19] 黎袁富, 杜家豪, 莫家浩, 等. 基于YOLOX的鱼苗检测与计数[J]. 电子元器件与信息技术, 2022, 6(5): 192-194.
[20] 金耀, 何秀文, 万世主, 等. 基于YOLO v3的生猪个体识别方法[J]. 中国农机化学报, 2021, 42(2): 178-183.
Jin Yao,He Xiuwen, Wan Shizhu, et al. Individual pig identification method based on YOLO v3 [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(2): 178-183.
[21] Kashiha M, Bahr C, Ott S, et al. Automatic identification of marked pigs in a pen using image pattern recognition [J]. Computers and Electronics in Agriculture, 2013, 93: 111-120.
[22] Ahrendt P, Gregersen T, Karstoft H. Development of a real-time computer vision system for tracking loose-housed pigs [J]. Computers & Electronics in Agriculture, 2011, 76(2): 169-174.
[23] 张建龙, 庄晏榕, 周康, 等. 基于机器视觉的育肥猪分群系统设计与试验[J]. 农业工程学报, 2020, 36(17): 174-181.
Zhang Jianlong, Zhuang Yanrong, Zhou Kang, et al. Design of automatic group sorting system for fattening pigs based on machine vision[J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(17): 174-181.
[24] Nasirahmadi A, Sturm B, Edwards S, et al. Deep learning and machine vision approaches for posture detection of individual pigs [J]. Sensors, 2019, 19(17): 3738.
[25] 赵正东, 王虎虎, 徐幸莲. 基于机器视觉的肉鸡胴体淤血检测技术[J]. 农业工程学报, 2022, 38(16): 330-338.
Zhao Zhengdong, Wang Huhu, Xu Xinglian. Broiler carcass congestion detection technology using machine vision [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(16): 330-338.
[26] 尚绛岚. 基于计算机视觉的智能牧场应用研究[D]. 包头: 内蒙古科技大学, 2020.
Shang Jianglan. Research on the application of intelligent pasture based on computer vision [D]. Baotou: Inner Mongolia University of Science & Technology, 2020.
[27] 薛鸿翔, 沈明霞, 刘龙申, 等. 基于改进YOLO v5s的经产母猪发情检测方法研究[J]. 农业机械学报, 2023, 54(1): 263-270.
Xue Hongxiang, Shen Mingxia, Liu Longshen, et al. Estrus detection method of parturient sows based on improved YOLO v5s [J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(1): 263-270.
[28] 白强, 高荣华, 赵春江, 等. 基于改进YOLOV5s网络的奶牛多尺度行为识别方法[J]. 农业工程学报, 2022, 38(12): 163-172.
Bai Qiang, Gao Ronghua, Zhao Chunjiang, et al. Multi-scale behavior recognition method for dairy cows based on improved YOLOV5s network [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(12): 163-172.
[29] Li Guoming, Huang Yanbo, Chen Zhiqian, et al. Practices and applications of convolutional neural network-based computer vision systems in animal farming: A review [J]. Sensors, 2021, 21(4).
[30] 刘双喜, 孙林林, 王震, 等. 复杂背景下苹果树花量模糊聚类准确估测模型[J]. 中国农机化学报, 2017, 38(8): 74-81.
Liu Shuangxi, Sun Linlin, Wang Zhen, et al. Fuzzy clustering accurate estimation model of apple tree flowers with complex background [J]. Journal of Chinese Agricultural Mechanization, 2017, 38(8): 74-81.
[31] 刘双喜, 张磊, 张宏建, 等. 基于新梢叶节距的苹果树叶片氮含量检测[J]. 中国农机化学报, 2019, 40(7): 89-96.
Liu Shuangxi, Zhang Lei, Zhang Hongjian, et al. Nitrogen content tests for apple tree leaves based on leaf node pitches of shoots [J]. Journal of Chinese Agricultural Mechanization, 2019, 40(7): 89-96.
[32] Sun M, Si J, An D, et al, Nondestructive measurement of tomato seedlings during their growth based on machine vision [C]. 2006 Second International Symposium on Plant Growth Modeling and Applications, 2006: 255-258.
[33] McCarthy Alison, Raine Steven. Automated variety trial plot growth and flowering detection for maize and soybean using machine vision [J]. Computers and Electronics in Agriculture, 2022, 194: 106727.
[34] Setyawan R A, Basuki A, Wey C Y. Machine vision-based urban farming growth monitoring system [C]. 2020 10th Electrical Power, Electronics, Communications, Controls and Informatics Seminar, 2020: 183-187.
[35] Loresco P J, Valenzuela I, Gamara R P, et al. Growth stage identification for cherry tomato using image processing techniques [C]. 2020 IEEE 12th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment, and Management, 2020: 1-6.
[36] 郭文娟, 冯全, 李相周. 基于农作物病害检测与识别的卷积神经网络模型研究进展[J]. 中国农机化学报, 2022, 43(10): 157-166.
Guo Wenjuan, Feng Quan, Li Xiangzhou. Research progress of convolutional neural network model based on crop disease detection and recognition [J]. Journal of Chinese Agricultural Mechanization, 2022, 43(10): 157-166.
[37] 魏晨, 国树金, 荆茂焱, 等. 美国白蛾幼虫网幕图像识别算法及其视觉伺服系统研究[J]. 中国农机化学报, 2022, 43(11): 62-68.
Wei Chen, Guo Shujin, Jing Maoyan, et al. Study on the in mage recognition algorithm and visual servo system of Hyphantria cunea larvae nets [J]. Journal of Chinese Agricultural Mechanization, 2022, 43(11): 62-68.
[38] Nancy P,Pallathadka H, Naved M, et al. Deep learning and machine learning based efficient framework for image based plant disease classification and detection [C]. 2022 International Conference on Advanced Computing Technologies and Applications, 2022: 1-6.
[39] 党满意, 孟庆魁, 谷芳, 等. 基于机器视觉的马铃薯晚疫病快速识别[J]. 农业工程学报, 2020, 36(2): 193-200.
Dang Manyi, Meng Qingkui, Gu Fang, et al. Rapid recognition of potato late blight based on machine vision [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(2): 193-200.
[40] 王珊, 薛新宇, 郭祥雨. 基于机器视觉的油菜菌核病分级检测研究[J]. 中国农机化学报, 2022, 43(5): 47-53.
Wang Shan, Xue Xinyu, Guo Xiangyu. Classification and detection of rapeseed sclerotium disease based on machine vision [J]. Journal of Chinese Agricultural Mechanization, 2022, 43(5): 47-53.
[41] Zhang Y, Ren T, Li C, et al. Research on recognition method of common corn diseases based on computer vision [C]. 2019 11th International Conference on Intelligent Human-Machine Systems and Cybernetics, 2019: 328-331.
[42] Hua S, Xu M, Xu Z, et al. Multi-feature decision fusion algorithm for disease detection on crop surface based on machine vision [J]. Neural Computing and Applications, 2022, 34(12): 9471-9484.
[43] Agnihotri V. Machine learning based pest identification in paddy plants [C]. 2019 3rd International Conference on Electronics, Communication and Aerospace Technology, 2019: 246-250.
[44] 孙丰刚, 王云露, 兰鹏, 等. 基于改进YOLOv5s和迁移学习的苹果果实病害识别方法[J]. 农业工程学报, 2022, 38(11): 171-179.
Sun Fenggang, Wang Yunlu, Lan Peng, et al. Identification of apple fruit diseases using improved YOLOv5s and transfer learning [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(11): 171-179.
[45] Thakur Poornima Singh, Khanna Pritee, Sheorey Tanuja, et al. Trends in vision-based machine learning techniques for plant disease identification: A systematic review [J]. Expert Systems With Applications, 2022, 208: 118117.
[46] Li Z, Yuan X, Wang C. A review on structural development and recognition-localization methods for end-effector of fruit-vegetable picking robots [J]. International Journal of Advanced Robotic Systems, 2022, 4: 52.
[47] 成伟, 张文爱, 冯青春, 等. 基于改进YOLOv3的温室番茄果实识别估产方法[J]. 中国农机化学报, 2021, 42(4): 176-182.
Cheng Wei, Zhang Wenai, Feng Qingchun, et al. Method of greenhouse tomato fruit identification and yield estimation based on improved YOLOv3 [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(4): 176-182.
[48] 陈品岚, 张小花, 朱立学, 等. 基于树莓派及深度学习的柑橘识别系统设计[J]. 中国农机化学报, 2022, 43(9): 131-136.
Chen Pinlan, Zhang Xiaohua, Zhu Lixue, et al. Citrus recognition system design based on Raspberry Pi and deep learning [J]. Journal of Chinese Agricultural Mechanization, 2022, 43(9): 131-136.
[49] Yin G, Xie Y, Yun J, et al. Based on machine vision fruit target detection method[J]. IOP Conference Series Earth and Environmental Science, 2020, 428: 012072.
[50] 陈燕, 王佳盛, 曾泽钦, 等. 大视场下荔枝采摘机器人的视觉预定位方法[J]. 农业工程学报, 2019, 35(23): 48-54.
Chen Yan, Wang Jiasheng, Zeng Zeqin, et al. Research on vision pre-positioning for litchi picking robot under large field of view [J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(23): 48-54.
[51] Wang M, Wei J, Yuan J, et al. A research for intelligent cotton picking robot based on machine vision [C]. 2008 International Conference on Information and Automation, 2008: 800-803.
[52] 冯俊惠, 李志伟, 戎有丽, 等. 基于改进Hough圆变换算法的成熟番茄果实识别[J]. 中国农机化学报, 2021, 42(4): 190-196.
Feng Junhui, Li Zhiwei, Rong Youli, et al. Identification of mature tomatoes based on an algorithm of modified circular Hough transform [J]. Journal of Chinese Agricultural Mechanization,2021, 42(4): 190-196.
[53] 马志艳, 朱熠, 张徐康, 等. 基于视觉的玉米苗期作物识别与定位方法研究[J]. 中国农机化学报, 2020, 41(9): 131-137.
Ma Zhiyan, Zhu Yi, Zhang Xukang, et al. Research on the method of crop recognition and location in maize seedlings stage based on vision [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(9): 131-137.
[54] 吕小莲, 吕小荣, 卢秉福. 西红柿采摘机器人视觉系统的设计与研究[J]. 传感器与微系统, 2010, 29(6): 21-24.
Lü Xiaolian, Lü Xiaorong, Lu Bingfu. Design and research on tomato-harvesting robot visual system [J]. Transducer and Microsystem Technologies, 2010, 29(6): 21-24.
[55] 陈志伟. 基于YOLOX的马铃薯种薯芽眼检测与自动切块试验研究[D]. 泰安: 山东农业大学, 2022.
Chen Zhiwei. YOLOX-based potato seed potato sprout eye detection and automatic cutting test research [D]. Taian: Shandong Agricultural University, 2022.
[56] Su F, Zhao Y, Shi Y, et al. Tree trunk and obstacle detection in apple orchard based on improved YOLOv5s model [J]. Agronomy. 2022, 12(10): 2427.
[57] Tang Y, Chen M, Wang C, et al. Recognition and localization methods for vision-based fruit picking robots: A review [J]. Frontiers in Plant Science, 2020, 11: 510.
[58] Tian Z, Ma W, Yang Q, et al. Application status and challenges of machine vision in plant factory: A review [J]. Information Processing in Agriculture, 2022, 9(2): 195-211.
[59] 田志伟, 马伟, 张梅, 等. 温室智能装备系列之一百三十植物工厂中机器视觉技术应用现状与挑战[J].农业工程技术, 2022, 42(1): 36-45.
猜你喜欢
电子制作(2018年18期)2018-11-14 01:48:20
中国公共安全(2017年8期)2017-10-13 08:12:21
中国公共安全(2017年8期)2017-10-13 08:12:20
无线互联科技(2016年13期)2017-01-10 02:49:09
现代电子技术(2016年22期)2016-12-26 15:42:37
电子技术与软件工程(2016年19期)2016-12-19 19:21:36
中国科技纵横(2016年17期)2016-11-30 21:49:24
中国科技博览(2016年18期)2016-10-19 07:01:13
中国市场(2016年36期)2016-10-19 03:40:15
科技视界(2016年20期)2016-09-29 14:13:02