电传飞机极限环振荡问题及解决措施研究
2023-04-26 03:18:36崔彦勇裴登洪张羽白
教练机 2023年1期
张 坤,崔彦勇,裴登洪,张羽白
(航空工业洪都,江西 南昌,330024)
0 引言
飞机飞行中受到气流环境或其他因素的扰动,会出现对应轴向的响应,正常情况下,该响应因飞机具有稳定性会使其趋于消失,但在飞行中发现,飞机会出现无指令输入、不收敛的小幅值自激振荡现象,简称极限环振荡(Limit Cycle Oscillations)。极限环振荡会导致驾驶员处的法向过载存在交变,振荡幅值在大于一定值后,会影响飞行员操纵的精确性和飞机战术性能的发挥,严重情况甚至会给飞机飞行安全带来威胁。
长期以来,飞机极限环振荡的研究受到各国工程界和科学技术界高度重视和广泛关注,属于国际航空的共同难题,开展飞机极限环振荡问题及解决措施的研究具有非常重要的现实意义。
1 飞行品质要求
飞机要获得满意的飞行品质,极限环振荡幅值需要满足GJB 185-1986 和GJB 2874-1996 中关于剩余振荡的要求:“在平静大气中,任何持续的剩余振荡不应该妨碍驾驶员完成各项任务,对于标准1 和标准2 驾驶员座位处的法向过载振荡不得大于±0.05g,对于要求精确姿态操纵的战斗飞行阶段,俯仰姿态的振荡不得大于±0.17°。 ”
2 国内外情况
2.1 B-1 轰炸机
美国B-1 轰炸机在空中加油、亚声速和超声速巡航时发生过俯仰方向的极限环振荡。图1 所示为两个状态点的极限环俯仰振荡飞行曲线,该问题一直持续困扰B-1 飞机,后来通过在系统中引入20Hz 的高频抖动信号加以消除和抑制[1]。
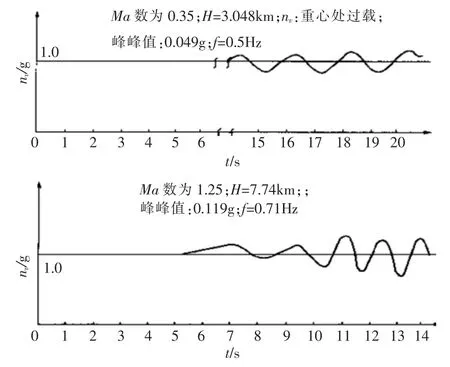
图1 B-1 轰炸机的极限环俯仰振荡
2.2 B-2 轰炸机
美国B-2 轰炸机1991 年1 月高空高速试飞,发生幅值±0.02g、频率1.4 Hz 的极限环俯仰振荡。1992年9 月低空高速水平飞行,发生幅值±0.1g、频率1~1.6Hz 俯仰振荡;机动转弯飞行,发生幅值±0.2g 俯仰振荡。 1994 年 6 月,发生幅值±0.3g、频率 1.6Hz 俯仰振荡。 极限环俯仰振荡情况如图2 所示。 该问题在长期攻关后也未完全解决,后续飞行通过缩小包线,实施边界保护,避免飞行中出现极限环振荡。
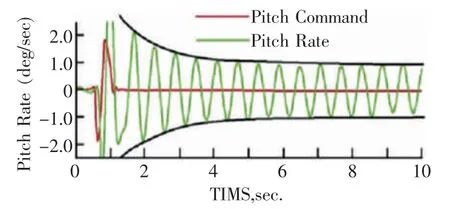
图2 B-2 轰炸机的极限环俯仰振荡
3 电传飞机极限环振荡案例
某型电传飞机出现高亚声速区平飞状态下的极限环俯仰振荡,法向过载振荡幅值约±0.2g,周期约3s。 典型平飞加速飞行数据曲线如图3 所示,8km 平飞加速至0.9M,可以看出在马赫数大于约0.8M 后出现非指令性、不收敛的小幅值自激俯仰振荡,飞机迎角、法向过载、俯仰角速率以及平尾偏度等均呈现规律性持续等幅振荡,符合极限环俯仰振荡特征。
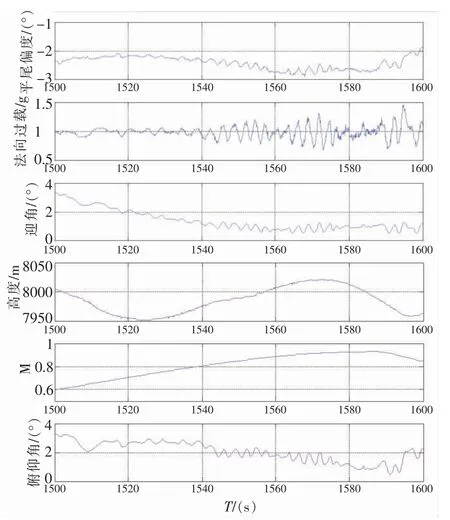
图3 平飞加速极限环俯仰振荡飞参数据曲线
4 飞机极限环振荡分析
典型电传飞机利用飞机运动信息反馈进行闭环控制,能够实现纵向放宽静安定性控制,飞行员的操纵杆量直接对应的是飞机的运动量,控制回路示意图如图4 所示。纵向控制律根据传感器实时测量的飞机响应参数,如俯仰角速率、迎角、法向过载等信号,实时解算平尾控制指令驱动平尾作动器,平尾作动器带动摇臂对平尾舵面进行控制,平尾舵面偏转产生气动力对飞机的俯仰响应进行控制[2]。
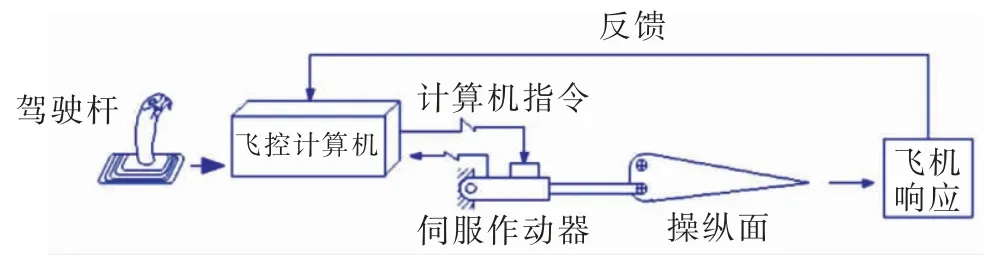
图4 电传飞机操纵系统回路示意图
为研究飞机极限环俯仰振荡问题的机理,找到解决或抑制该类振荡方法,详细分析纵向控制响应回路各环节特性,即从气动特性、平尾传动机构非线性和飞控系统非线性等方面进行研究,对飞机俯仰控制的相关环节进行梳理,极限环俯仰振荡产生的相关因素可能包括:
1) 极限环俯仰振荡现象常与飞行马赫数关系明显,由此需分析飞机气动特性,包括纵向安定性、平尾操纵效率和铰链力矩等;
2) 控制系统非线性,平尾作动器对平尾控制指令的响应精度不足或响应滞后;
3) 机械传动机构存在非线性,平尾舵面实际偏度对平尾作动器存在不响应或响应迟滞的情况。
根据上述分析,对涉及到的气动特性、纵向传动非线性对飞机闭环响应特性的影响进行研究。
4.1 气动特性分析
4.1.1 纵向安定性
三代和三代以上飞机在设计时大都采用边条翼、翼身融合及前缘机动襟翼等先进的气动布局,普遍设计为弱静安定或静不安定,可增加有效升力、减小阻力、减小机翼载荷、减重等。但同时也存在一系列问题,如飞机本体安定性差、弱阻尼、短周期频率低等问题。
某型电传飞机干净构型为例,其纵向静安定度在0.8M 左右时,迎角0~4°附近的飞机纵向静安定度较小,飞机基本处于中立安定状态。
4.1.2 平尾操纵效率
当飞机处于中立安定区域时,平尾操纵效率极高,全机俯仰运动受平尾偏转非常敏感,飞机干净构型情况下0.2g 法向过载增量所需的平尾偏度如图5 所示。
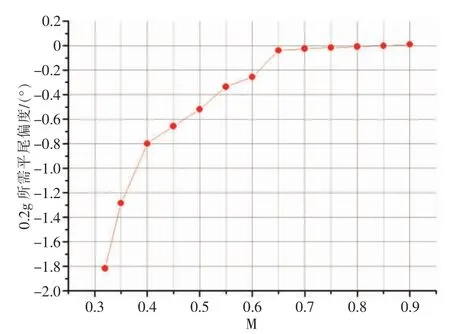
图5 干净构型0.2g 所需平尾偏度
从图5 可以看出,马赫数大于0.65M,飞机0.2g法向过载增量所需平尾偏度不足0.1°,这对纵向控制系统传动非线性提出极严格要求,即要求飞机平尾控制精度、纵向传动控制精度极高。
根据上述分析,飞机纵向俯仰振荡出现的主要特点为纵向中立静安定,平尾操纵效率极高。
4.1.3 小结
上述特点使得飞机在纵向中立安定区时的响应受平尾控制非常敏感,导致平尾传动机构间隙、摩擦力等非线性因素对纵向操纵特性影响较大,为纵向极限环俯仰振荡提供了先决条件。
4.2 纵向传动非线性测试分析
根据飞机纵向控制传动分析,飞机纵向传动的控制精度主要体现在两个方面:
1) 平尾作动器对平尾指令的响应精度
作动器测量元件具有死区特性、放大元件具有饱和特性、执行元件兼有死区和饱和特性、精加工的齿轮杆系传动存在间隙特性。当这些非线性特性控制不好时,会使作动器的响应门限、滞环偏大,导致作动器响应与预期的控制指令存在较大差异[3]。
2) 平尾舵面对平尾作动器的响应精度
操纵面间隙作为一种常见的结构非线性,是由飞机设计、制造、装配等众多环节所产生,机械传动过程中由于零件表面质量、装配应力等因素也必然会产生一定的摩擦力。
本节将从工程测试的角度对平尾伺服作动器、舵面机械传动的非线性影响进行分析。
4.2.1 纵向传动非线性影响测试
综合上述平尾作动器非线性和平尾机械传动非线性的分析,总结纵向控制传动非线性最终体现在实际平尾舵面响应与操纵指令的相位滞后及幅值响应变形。为尽可能真实模拟此类非线性特性,在地面试验中通过调整作动器参数及系统采集方法测试其对极限环俯仰振荡的影响。
地面铁鸟闭环时域测试中,在平尾作动器存在较大非线性时,飞机干净构型8km,0.8M 平飞状态出现极限环俯仰振荡现象,调整作动器非线性特性或改变平尾偏度测量方法试验,可以改变极限环俯仰振荡的幅值特征,试验情况分析如下:
1) 图6 中红色实线:作动器非线性大、系统试验器平尾采集频率低时,飞机呈现明显的极限环俯仰振荡特性,平尾振荡幅值约±0.1°,法向过载振荡幅值较大约±0.35g,振荡周期约 2.5s;
2) 图 6 中蓝色虚线:作动器非线性大、使用LVDT 平尾位置采集时,飞机极限环俯仰振荡幅值有所减小,平尾振荡幅值约±0.03°,法向过载振荡幅值约±0.15g;
3) 图6 中黑色虚线:使用优化后的作动器,传动非线性小,飞机时域响应无规律性俯仰振荡,但法向过载仍存在一定波动,满足国军标剩余振荡不大于±0.05g 的要求。
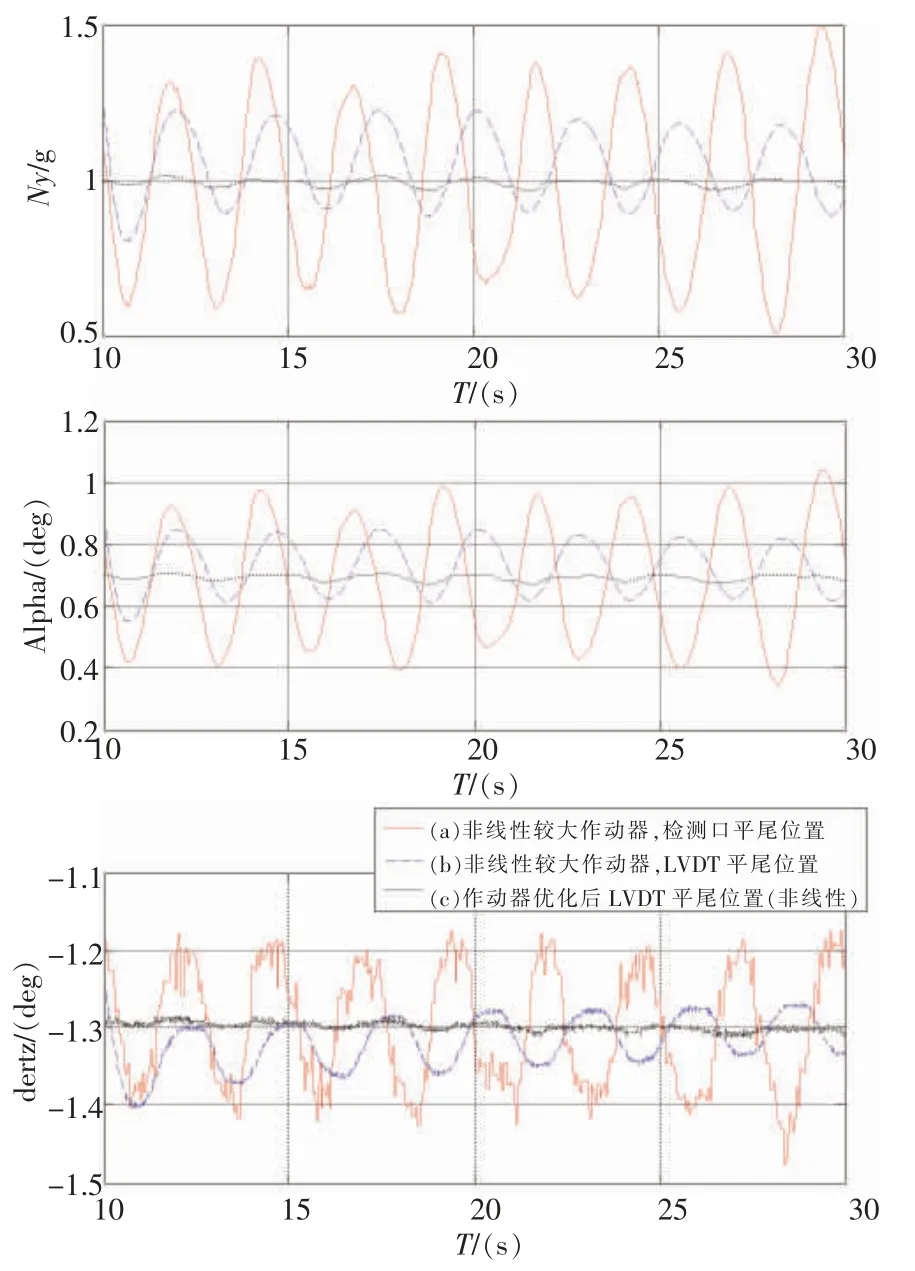
图6 平尾非线性测试曲线
4.2.2 气动特性影响测试
在试验过程中,为测试飞机气动特性对极限环俯仰振荡的影响,试验环境同上述c 条,更改测试状态点至8km,0.6M 状态,测试结果对比如图7 所示。 飞机在0.6M 时无明显规律性俯仰振荡,法向过载存在小幅不规律摆动,约0.01~0.02g,判断为正常试验噪声导致的响应波动,飞机法向过载响应波动幅值明显小于0.8M 状态。
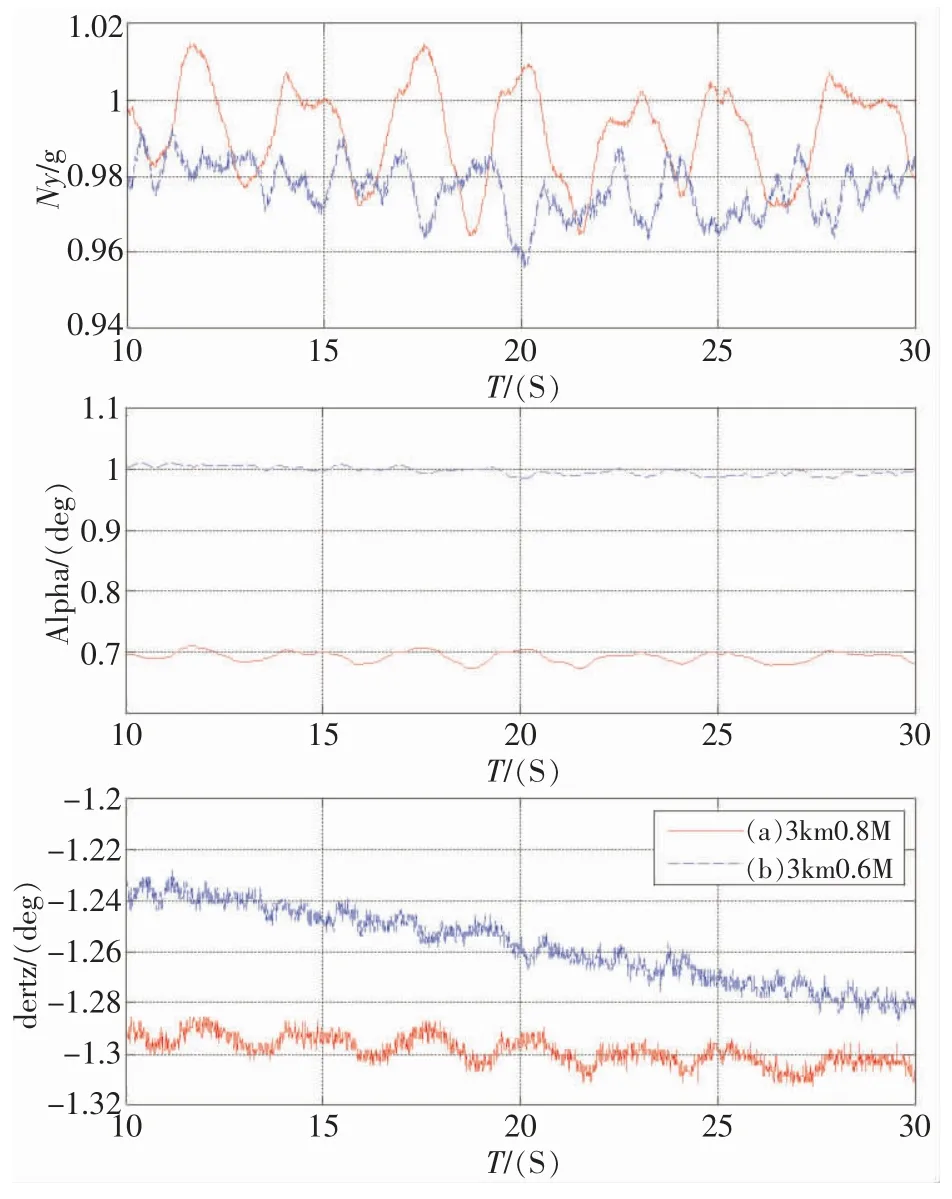
图7 不同状态点的铁鸟时域曲线
4.2.3 小结
综合本节分析可以看出:
1) 飞机纵向传动非线性特性对飞机极限环俯仰振荡影响明显,通过改变非线性特性可以明显改变极限环俯仰振荡的幅值;
2) 相同非线性条件下,飞机临界安定、尾操纵效率高的情况下更容易出现极限环俯仰振荡。
建议尽可能减小纵向控制系统中包括作动器和机械传动中的摩擦力、死区、间隙等非线性因素。
5 案例论证
针对2.1 节高亚声速平飞极限环俯仰振荡案例,在完成平尾传动机构非线性优化后进行了专项飞行验证,试飞结果表明:飞机低、中、高空大速度平飞俯仰振荡现象基本消失,满足GJB 185-1986 中剩余振荡不大于±0.05g 的要求。高亚声速平飞极限环俯仰振荡问题得到解决,典型飞行数据曲线如图8 所示。
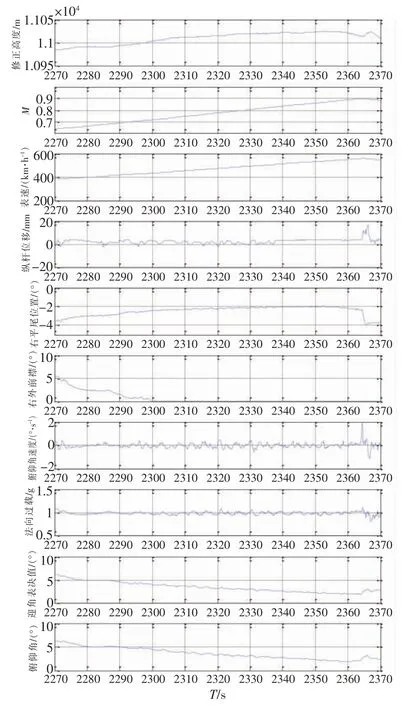
图8 平尾传动机构优化后干净构型平飞加速飞行曲线
6 结语
文章通过对飞机极限环俯仰振荡问题的机理分析,总结飞机出现极限环俯仰振荡的原因主要为飞机系统闭环回路中存在的非线性因素,包括传动中的摩擦、死区、间隙等因素都可能引起极限环振荡。飞机本身的静不稳定性也可能增强极限环振荡。极限环俯仰振荡会影响飞机飞行品质,同时还会进一步提高舵面控制精度要求,导致作动器控制精度要求提高、机械传动精度要求提高、装配工艺要求提高、外场使用维护工作增加等一系列问题。
受工程制造精度、公差控制等限制,机械传动非线性不可能完全消除,因此,建议在新机设计时,尽量避免平尾操纵效率过高或大范围中立安定的情况,否则易出现极限环振荡。
猜你喜欢
直升机技术(2021年4期)2022-01-12 13:18:12
装备制造技术(2020年9期)2021-01-26 00:14:42
湖北农机化(2020年9期)2020-01-08 07:40:51
民用飞机设计与研究(2019年4期)2019-05-21 07:21:30
大飞机(2018年1期)2018-05-14 15:59:08
西安航空学院学报(2017年3期)2017-07-05 14:58:36
北京航空航天大学学报(2016年2期)2016-12-01 03:00:27
时代农机(2016年3期)2016-09-06 06:28:21
现代工业经济和信息化(2016年7期)2016-05-17 05:36:45
航空学报(2015年4期)2015-05-07 06:43:33