基于机器视觉的油田仪表示数自动识别方法
2023-04-23 19:20赵磊
科技资讯 2023年6期
赵磊


摘要:傳统的以指针定位为基础进行仪表示数识别主要通过人眼确定指针位置,导致识别结果误差较大。因此,该研究将机器视觉应用在自动识别中,设计一种新的油田仪表示数识别方法。针对CCD摄像机拍摄的油田仪表图像,进行光照均衡、图像校正和图像分割处理,再通过Faster-RCNN网络结构检测并提取仪表示数图像的目标识别区域。运用机器视觉算法获取仪表刻度数值信息,并精准定位仪表指针位置。根据指针与最小刻度线夹角,自动识别出当前仪表示数。实验结果表明:所提方法的示数识别结果最大绝对误差仅为0.01 MPa,可满足油田仪表示数识别精度要求。
关键词:机器视觉 油田仪表 图像识别 目标检测 指针定位 透视变换矩阵
The Automatic Recognition Method of OilField Instrument Indication Based on Machine Vision
ZHAO Lei
(Liaohe Oilfield Materials Company, Panjin, Liaoning Province,124010 China)
Abstract:The traditional instrument indication recognition based on pointer positioning mainly determines the pointer position through human eyes, which results in a large error in the recognition result. Therefore, this study applies machine vision to automatic recognition, and designs a new recognition method of oilfield instrument indication. The oilfield instrument image captured by CCD camera is carried out the illumination equalization, image correction and image segmentation, and then the target recognition area of the instrument indication image is detected and extracted through Faster-RCNN network structure. The machine vision algorithm is used to obtain the scale value information of the instrument and accurately locate the pointer position of the instrument. According to the angle between the pointer and the minimum scale line, the current instrument indication is automatically recognized. The experimental results show that the maximum absolute error of the indicator identification result of the proposed method is only 0.01 MPa, which can meet the accuracy requirements of oilfield instrument indicator identification.
Key Words: Machine vision; Oilfield instrument; Image recognition; Target detection; Pointer positioning; Perspective transformation matrix
现代科学技术的发展,引起了信息技术领域的进步,各行各业都开始向着数字化方向进步[1]。尤其对于化工行业来说,为保证生产的安全性,更需要对生产过程进行精准监控和测量。电子数显式仪表具有直观性、高精度的特点[2],在石油化工领域发挥了巨大作用,但是测量数值的获取依旧需要通过人眼识别。面对动辄持续数十个小时的生产工作,依靠人工的方式读取油田仪表示数,极易出现数据录入错误问题[3]。对此,需要设计一种自动化识别方法,智能获取油田仪表数据。
参考传统的仪表示数识别策略,文中提出将机器视觉技术应用到油田仪表指针定位过程中,得到更加准确的指针定位结果,再计算当前指针与仪表刻度之间的夹角,获取仪表示数自动识别结果。
1以机器视觉为基础设计油田仪表示数自动识别方法
1.1油田仪表图像预处理
应用CCD摄像机拍摄工作中的油田仪表图像,完成图像采集工作。考虑到图像采集环境中,会受到天气、光照等因素的影响,导致拍摄图像质量较差,需要进行光照均衡处理、图像配准处理和图像分割处理[4],得到预处理后的油田仪表图像。
设置完全不同的阴影区域和非阴影区域的输入,运用局部匹配算法对采集图像进行阴影检测。将影子像素看作图像的前景区,借助消光技术设置合理的阴影恢复系数,并获取光照与环境光照得到比例系数[5]。基于该比例系数展开二次光照处理,得到光照均衡处理后的图像。
通过FAST-9算法将光照均衡处理后的图像的特征点提取出来,并描述为二进制的字符串。引入特征匹配概念,建立透视变换矩阵,分析实时采集的油田仪表图像与参考图像之间的差异,并实现图像校正。已知特征匹配点坐标的情况下,假设其特征点的![]() 轴上下方向延伸正好穿过视域体的中心,则其透视变换矩阵可表示为:
轴上下方向延伸正好穿过视域体的中心,则其透视变换矩阵可表示为:
经过光照均衡处理后,油田仪表图像的目标区域和背景区域之间的差异度不断降低,会对仪表示数识别产生干扰。因此,在图像预处理过程中,运用最大类间方差法进行图像分割,针对分割后的图像展开示数自动识别。
1.2提取油田仪表示数识别区域
针对预处理后的图像进行示数自动识别时,需要先提取图像内油田仪表示数所在区域,避免图像背景信息干扰识别结果。文中采用了Faster-RCNN网络结构[6],进行目标区域检测。
在待识别油田仪表图像中,通过特征金字塔网络绘制候选框,选取目标识别区域。面对任意尺寸的油田仪表图像,建立特征图,并将其导入特征金字塔网络,通过卷积运算得出目标识别区域检测结果。为加强区域检测的直观性,Faster-RCNN网络结构输出的检测结果,只会出现两种情况,分别是前景区域和背景区域。应用Faster-RCNN算法进行卷积运算时,会出现多种损失情況,多任务损失函数为:
根据Faster-RCNN检测结果,确定油田仪表示数识别区域,并将其单独提取出来进行后续指针定位和示数识别。
1.3设计基于机器视觉的指针定位方法
油田仪表示数的识别需要以仪表刻度和指针方向为基础。该研究为提升示数识别的准确度,运用机器视觉算法结合指针仪表的结构特点完成指针位置的定位。根据调查结果可知,油田仪表的指针根部与仪表圆心相重叠,而仪表的整体刻度区域分布形状为环形。根据同心圆原理可确定油田仪表的起始刻度位置和量程。
想要得到更加精确的仪表图像,还需进一步提取刻度盘的信息。在机器视觉算法中选择霍夫检测算法[7],观察仪表的圆心和最外面的边缘轮廓,截取仪表盘的刻度区域,再针对仪表图像进行二值化处理和极坐标变换,获取准确的刻度信息。其中,极坐标变换原理如图1所示。
以此为基础,进行仪表指针定位研究,考虑到仪表的指针是线型分布的,属于比较容易识别的图像内容。因此,文中在深入研究各种机器视觉算法后,采用霍夫直线检测算法进行仪表指针的自动定位。前文基于机器视觉技术已经完成了图像边缘检测,此时设置图像边缘存在众多待检测的边缘点,并且每个边缘点都可引出无数条直线。在霍夫变换空间中,遍历每条直线,与指针识别图像进行匹配,通过数值统计和分析,确定与识别出的指针图像最接近的直线,并计算出直线内所有坐标点,综合分析得出油田仪表指针定位结果。
1.4获取油田仪表示数自动识别结果
由于油田仪表的刻度总是均匀分布的,所以可根据油田仪表指针定位结果,获取其与最小刻度线之间夹角的角度,完成仪表示数的计算。首先,指针对应直线的斜率为:
通过上述计算,可得出油田仪表示数自动识别结果。
2实验
2.1实验设置
依托于机器视觉技术,完成油田仪表示数自动识别方法设计后,在Win 10 (64位)系统上应用该方法进行实验测试,验证所提识别方法的合理性和优越性。为保证实验的顺利进行,选择16G RAM的运行内存和Intel-I9系列的 CPU,搭建基本实验环境。同时,应用python3. 52编程语言,按照文中研究内容构建仪表示数自动识别编码框架。
本次实验开始之前,在网络上采集30张油田仪表原始图像,并将所有图像的尺寸统一设置为640×640大小,并通过labelme软件对每张图像进行编号,制作成实验用数据集。
2.2油田仪表示数识别结果
文中提出运用Faster-RCNN网络对原始图像进行检测,提取油田仪表示数区域。为保证网络检测结果更加准确,在实验数据集中随机抽选20张图像,组成训练集,对Faster-RCNN网络进行训练。以某一张图像为例,应用训练好的网络对其进行检测,得到目标识别区域提取结果,如图2所示。
从图2可看出,在Faster-RCNN网络的作用下,准确提取了图像中仪表所在区域,再依靠机器视觉算法对该区域进行指针定位和示数识别,确定读数范围均为0~1.6MPa,仪表编号1的示数值为0.45 MPa,编号为2的仪表示数值为0.00 MPa。综上所述,应用文中提出方法可得到仪表示数,表明了本文研究内容具有可行性。
2.3识别性能分析
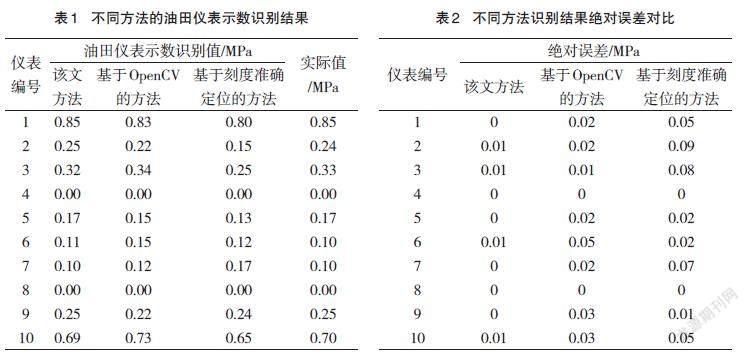
本次实验过程中,应用所提方法对除训练集外的10张图像进行示数识别测试。同时,选择基于OpenCV的方法和基于刻度准确定位的方法作为对比方法,同样进行示数识别。根据记录结果可知,三种方法的识别结果如表1所示。
根据表1可知,三种方法都可自动识别出仪表示数,但識别结果与实际值存在偏差。本次选用绝对误差作为评价指标,针对表1所示的示数识别结果进一步计算,明确各识别方法的应用性能。
根据表2可知,文中设计方法的最大绝对误差仅为0.01 MPa,甚至很多时候示数识别结果与实际值保持一致。而基于OpenCV的方法识别结果的最大绝对误差为0.05MPa,基于刻度准确定位的方法的示数识别绝对误差最大值达到了0.09MPa。三种方法对比可知,本文研究的自动识别方法,使得示数识别最大绝对误差降低了80%、88.89%。
3结语
考虑到油田仪表示数识别的准确性要求,文中提出了以机器视觉算法为核心的自动识别方法。通过图像预处理、识别区域提取、仪表指针定位、仪表示数识别等环节,得到最终示数识别结果。
参考文献
[1]杨典,李小燕,刘培焱,等.基于OpenCV的变电站仪表识别方法研究[J].自动化与仪表,2022,37(4):75-80.
[2]王欣艺,景超,张浩宇,等.基于计算机视觉技术的指针式仪表智能识别方法[J].电子技术与软件工程,2022(7):172-177.
[3]郭宇强,易映萍.变电站指针式仪表示数识别方法研究[J].软件导刊,2022,21(3):62-66.
[4]胡鑫,欧阳华,尹洋,等.一种改进的指针式仪表示数识别方法[J].电子测量技术,2021,44(13):132-137.
[5]向友君,江文,阮荣钜.基于刻度准确定位的指针式仪表示数识别方法[J].华南理工大学学报(自然科学版),2020,48(10):129-135.
[6]宋延卫,杨玉东,于悦,等.基于支持向量机的燃气表示数识别[J].长春师范大学学报,2020,39(2):59-63.
[7]龚安,张洋,唐永红.基于YOLOv3网络的电能表示数识别方法[J].计算机系统应用,2020,29(1):196-202.
猜你喜欢
电子制作(2019年16期)2019-09-27
中国交通信息化(2019年4期)2019-07-13
电子制作(2018年19期)2018-11-14
电子制作(2018年14期)2018-08-21
软件(2016年4期)2017-01-20
科教导刊·电子版(2016年28期)2017-01-10
科教导刊(2016年25期)2016-11-15
软件工程(2016年8期)2016-10-25
科学与财富(2016年28期)2016-10-14
科技视界(2016年20期)2016-09-29