
面向中学生的人工智能算法教学探究
2023-04-20 03:53:57郭彦哲
中小学信息技术教育 2023年4期
郭彦哲

【摘 要】本研究探索了在中学教授人工智能计算机视觉算法的教学方法,总结了计算机视觉算法教学的要点和技巧。作者选取了计算机视觉中的经典任务物体识别作为探究对象,以花朵的物体识别为例,通过将物体识别算法拆分为不同的步骤,根据学生的数学、物理、信息技术的知识背景,选择重点进行教学并设计教法。该物体识别算法被分为颜色空间转换、色调降维、圆圈算法、验证等四个步骤,通过与学生日常学习、生活、娱乐的例子相结合,将抽象的算法问题趣味化、实例化、活动化,取得了良好的教学效果,为人工智能算法的教学提供了生动的案例。
【关键词】人工智能;计算机视觉;物體识别;算法教学
【中图分类号】G434 【文献标识码】A
【论文编号】1671-7384(2023)04-084-03
当前,K12人工智能教育开展得如火如荼,各类机构、赛事、课程眼花缭乱。同时,人工智能也被各高校、研究机构、互联网企业视为必争之地,每年都有大量的人力物力投入。然而,目前最前沿的人工智能技术如机器学习、深度学习,大多是基于大学的数学知识,如线性代数、微积分、统计学等。对大部分成年人来说尚且生涩的知识,对于抽象思维还未发育完全、数学基础正在搭建的孩子们无疑是巨大挑战。这也导致了K12人工智能教育更多地转向了对人工智能的感知,以及传统的机器人、开源硬件、编程等内容。然而,这些内容是原本已有的教学内容和方法,并没有真正将人工智能的核心——算法融入到教学中,学生仍存在缺乏对人工智能建立较科学的认识的问题。本研究将人工智能计算机视觉领域的算法引入中学课堂,以经典的物体识别任务为例,让学生亲身体会人工智能算法的精妙之处,点燃学生对人工智能研究的兴趣,让学生对人工智能算法有客观的认识。
人工智能发展现状与教学难点
目前人工智能的研究主要面向两大方向,计算机视觉和自然语言处理。传统的数据分析算法在这两类数据面前都束手无策,因为传统数据算法往往是基于关系型数据库基础上建立的结构化数据,对非结构化或半结构化数据缺乏处理手段和适应性。目前的人工智能算法的优点,正在于对非结构化或半结构化数据的鲁棒性(robustness,音译,人工智能领域词汇,意为健壮、强壮)。人工智能的算法模型虽然基于上述高等数学知识,但是对于不同的任务或模型,往往需要一系列一般或特殊的预处理或后处理方法,这些方法能够很大程度地影响到整个模型的表现。即使是当下最火的自然语言处理模型ChatGPT,所涉及的前处理方法也和之前的模型是类似的。这些预处理或后处理方法,有的是基于如图论、排序等传统计算机算法,有的是新提出的针对非结构化数据的方法(如词语向量化),有的甚至比模型本身的数学理论更复杂(如支持向量机),有的并不需要数学背景知识(如中文分词)。因此,如果想教授人工智能算法,应该基于学生的年龄、知识背景,从可理解的人工智能模型、前处理/后处理方法入手,设计教法、开发课程。依照该思路,作者选取了计算机视觉中的经典任务——物体识别,以识别花朵的图像处理算法为例,设计了一堂面向中学生的人工智能算法课,利用学生已有的数学基础和生活实例,用小步子教学法逐步深入,降低算法理解难度。
物体识别算法的教学实例探究
计算机视觉的任务通常分为预处理、特征提取、检测/模式识别、验证等步骤,物体识别算法也不例外。通过学习物体识别算法,学生可以了解计算机视觉乃至人工智能的一般算法步骤,从而建立对人工智能算法的初步认识。实例所用的花朵识别算法,将该过程分为了四个大步骤:一是预处理:颜色空间由RGB格式转为HSV;二是特征提取:确定花的色调区间,并转化为黑白图片;三是检测/模式识别:边缘处理,圆形查找算法标记花朵;四是验证:与手工结果对比,计算正确率。
1.预处理—— 颜色空间转换的“小游戏”
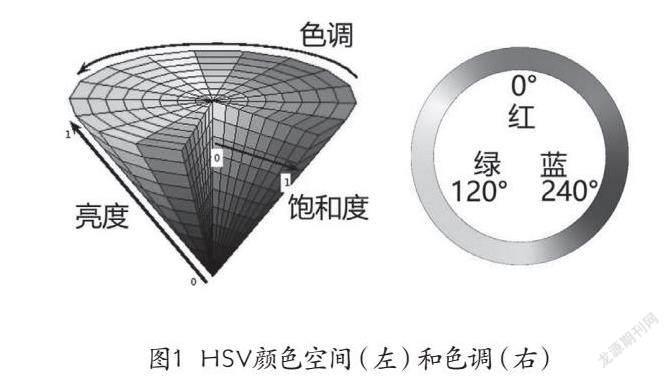
第一步是预处理。用于计算机视觉的图片来源各异,图片的大小、格式、分辨率、颜色也各异,关键信息往往用较少的颜色、分辨率等维度即可体现,因此,预处理需要对图片格式进行统一规范和降维处理。该算法中,颜色从RGB格式到HSV格式。RGB格式的本质是用红绿蓝三种相互独立的颜色作为颜色空间的参数,因此这三种颜色的值相当于三维直角坐标系的三个方向上的值。HSV格式的表示形式如图1所示。其中,S(饱和度)和V(亮度值)用两个相互独立的方向上的距离表示,H(色调)用角度表示。圆柱坐标系由径向距离、方位角、高度(“一角度两距离”)表示,与HSV格式一致。因此,HSV格式可以理解为数学中的圆柱坐标系。圆柱坐标系是二维的极坐标系扩展到三维坐标系后的其中一种,另一种是球坐标系。球坐标系由方位角、仰角和距离(“两角度一距离”)三种元素构成[1][2][3]。
中学生只学习了直角坐标系,极坐标系的概念是高中的内容[4],需要作为新知识点引入介绍,对于原本时间十分有限的课堂时间形成了不小的挑战。为了抓住学生的眼球,同时实现有效的教学,本课使用了学生常接触的游戏为例,说明不同坐标系的作用,并进行比较。首先,给出五子棋的例子,引导学生思考,用直角坐标系来表示五子棋的位置,便捷且直观。极坐标系的概念相对陌生且不容易说清楚,因此借鉴了常见的“黄金矿工”小游戏的例子。该游戏通过控制发射抓手的方向,决定所获得的奖品,抓手的方向相当于极坐标系中的角度。根据课堂反馈,学生都玩过这个游戏且熟悉规则,并知道关键在于角度的选择。接下来,引入极坐标系的概念,由角度和距离组成。由平面极坐标系可以延伸到圆柱坐标系,用一个角度和两个距离表示点。直角坐标系和圆柱坐标系都介绍完后,便可以解释颜色的两种表示方法:RGB格式和HSV格式。需要强调的是,色调(角度)表示的是颜色,按照赤橙黄绿青蓝紫转了360°。因为色调是下一步处理的基础,转换过程不需要详解,只需要告诉学生有公式可以套用即可。
结合学生熟悉的游戏案例教学极坐标系,让学生能够感知极坐标系的特点,且不会因枯燥的纯数学知识影响学习积极性;运用接触过的游戏案例,引起学生共鸣的同时激发思考欲和探索欲,学生能积极主动地参与新知识教授过程的反馈,让教学者能够及时了解学生的学习情况。实践中,较低年级的中学生也能够通过该案例理解极坐标系的概念和颜色空间的转换过程。
2.特征提取—— 色调与颜料盘
第二步是特征提取,将与任务目标相关的特征与无关特征进行分离,减少噪声,增强对比,进一步实现降低维度。因为目标黄色大丁草花朵是黄色的,因此需要确定对应黄色像素点,并转化为黑白图片。花的部分用白色表示,其他部分用黑色表示,实现目标分离。
上一步将RGB转换为HSV后,只需选取HSV中表示色调的部分进行筛选。这里需要向学生展示HSV的圆锥3D图(图1左),并指出色调所在的维度是角度。如0°代表紅色,120°代表绿色,240°代表蓝色(图1右),形如一个调色盘,所有颜色是以红橙黄绿青蓝紫连续变化的,最终紫色和红色相接,形成闭环。另外两个维度(饱和度、值)只会影响颜色的深浅和亮暗。将黄色色调的区域转换为白色,其他色调区域转换为黑色。这样原本每个像素点有三个数字表示,现在简化为0或1的黑白图,并且充分保留了花朵的信息,为下一步处理提供了便利。
联系学生熟知的红橙黄绿青蓝紫的颜色序列,调色盘的比喻将色调闭环的概念具象化,方便了学习者理解色调的含义。颜色空间转换和色调选取都是人工智能计算机图像领域的常用预处理方法,无论是图像分类还是体态分析等算法的预处理,都需要用到,因此,这两个步骤的教学为未来的人工智能图像处理算法学习打下了良好基础。
3.检测/模式识别—— 手动体验核心算法
第三步,检测/模式识别包含计算机视觉任务的核心模型和关键算法,在该目标识别任务中,包含了目标形状修饰和目标形状搜索。其中目标形状修饰使用了边缘处理,目标形状搜索使用了圆形查找算法。假定目标的花朵形状近似于圆形,使用边缘处理使其趋向圆形(图2a→b);然后将黑白的交界处转为白色,其余部分转为黑色(图2b→c);最后,使用圆形查找算法找出圆形(图2c→f)。
圆形查找算法体验时,让学生使用不同的半径,以白色边缘上的点为圆心画圆。在画圆的过程中,学生能够感受到该算法的查找过程,即同一半径画的圆如果能找到共同交点,即为找到一个圆的圆心(图2f,交点以三角形表示),若画圆的半径偏小(图2d)或偏大(图2e),都无法找到交点。每个被标记的圆圈将被作为一朵花。
圆形查找算法是该物体识别算法的核心部分,理解该算法能够让学生体会到人工智能的算法之美。对于编程基础有限的中学生,编程实现并不现实,此处利用了圆规画圆找规律的活动,让学生主动观察思考,发现所选半径和交点的关系,从而深刻理解圆形查找算法的关键点,成功实现了直观理解。
4.验证—— 体验人工智能的高效精准
第四步,验证算法的有效性和准确性,体现人工智能图像识别算法的高效、精准,同时指出存在的不足,让学生充分体会人工智能图像识别算法的优势和潜在改进的地方。
与手工结果对比,计算正确率。这个步骤较为简单,只需数出图片中圆圈的数量,再从彩图中数出花的数量,前者除以后者,便可得到正确率。学生基本可以看着图自行完成。同时,总结该算法的准确率,能够算出花的数量,但是有一定的误差,让学生看到算法有可提升的空间,鼓励学生树立进行人工智能算法研究的志向。
总结与反思
本研究探索了以趣味化、实例化、体验式的方法进行计算机视觉目标识别算法的教学。前处理中颜色空间转换采用了游戏案例比喻,将数学知识趣味化呈现;色调的讲解结合了调色盘的实例,将抽象概念实例化;核心算法的教学设计了动手体验的活动,将抽象算法变成了具体的任务,实现了“做中学”“玩中学”。前两步骤是人工智能计算机视觉的常见前处理方法,为学生将来学习其他人工智能图像算法奠定了良好基础。核心算法的教学证明了让中学生理解人工智能算法并不是遥不可及的任务,需要教师广泛且深入地了解人工智能的各项算法,同时结合中学生的数学、物理等知识背景设计活动,是可以实现中学生直观理解人工智能算法的。
参考文献
孙坚,臧涛成, 骆者虎,等. 在球和柱坐标系下作用于矢量函数的拉普拉斯算子[J]. 苏州科技大学学报(自然科学版),2019(1).
彭玉忠. 中学数学几种新增坐标系的构造及其应用[J].湘潭师范学院学报(自然科学版), 2009(1).
王涵云. 浅析极坐标系与坐标旋转[J]. 读写算: 教研版,2015(18).
刘殿芳,刘秀辉. 浅谈极坐标在高中数学中的应用[J].中学课程辅导(教学研究), 2018,12(26).
Bairwa N,Agrawal N K. Counting of flowers using image processing[J]. International Journal of Computer Applications, 2014(3): 0975-8887.
作者单位:福建厦门大学附属科技中学
编 辑:徐靖程
猜你喜欢
西安航空学院学报(2022年2期)2022-07-04 07:45:42
商界(2019年12期)2019-01-03 06:59:05
IT经理世界(2018年20期)2018-10-24 02:38:24
小康(2017年16期)2017-06-07 09:00:59
计算机应用(2016年12期)2017-01-13 20:26:21
中国新通信(2016年22期)2017-01-13 09:18:56
无线互联科技(2016年13期)2017-01-10 02:49:09
现代电子技术(2016年22期)2016-12-26 15:42:37
电子技术与软件工程(2016年19期)2016-12-19 19:21:36
中国科技纵横(2016年17期)2016-11-30 21:49:24
