红外目标模拟器光束不平行度测量与补偿方法研究
2023-04-06 09:18朱斐越李艳红王超峰
宇航计测技术 2023年1期
朱斐越,李艳红,杨 扬,王超峰,田 义
(上海机电工程研究所,上海201109)
1 引言
红外目标模拟器在实验室中用来模拟无穷远处的红外辐射,其出射光束的平行程度是红外探测与制导系统半实物仿真试验的重要指标之一。红外目标模拟器光学系统的结构形式主要可分为反射式、折反式和折射式3 种。目前,面向红外目标模拟器光束不平行度的测试,主要应用于反射式红外目标模拟器,用45°棱镜或五棱镜将光束转折90°后,借助自准直仪、经纬仪或可见光CCD 进行测试[1-6]。如1 064 nm 近红外波段的红外系统光束不平行度采用五棱镜和光电探测器的方法进行测量[7];QJ 2942-97《红外目标模拟器检定规程》中辐射出射光不平行度的测量,是用可见光源来代替红外目标模拟器的红外光源,用五棱镜和光学自准直仪进行测量[8]。在红外制导半实物仿真应用领域,红外成像目标模拟器或成像/点源复合目标模拟器大多采用非反射式光学系统[9,10],由于光学系统工作波段的限制,目前无法实现这类红外目标模拟器光束不平行度的测量。鉴于一般红外目标模拟器光束不平行度要求≤1′,提出基于五棱镜检测光束不平行度的方法,研制红外五棱镜,利用红外焦平面探测器开展基于非反射式光学系统的红外目标模拟器光束不平行度的测量研究。
2 红外目标模拟器光束不平行度产生机理
折射式红外目标模拟器的光学系统可以认为是成像光学系统的反向应用,因此设计时可以通过反向的思路进行设计[11]。
以基于电阻阵列的红外目标模拟器为例,电阻阵列的芯片位置可以看作传统成像光学系统的焦平面位置,因此红外目标模拟器出射光束的不平行度是电阻阵列芯片位置与焦平面位置不一致造成的。在目标模拟器出瞳处(产品探测系统接收端入瞳)本应平行出射的两条边缘光束有一夹角,将此夹角2θ定义为光束不平行度,如图1所示,为示意起见图中光束发散程度较大,引起目标模拟器首片透镜通光口径差异较大,实际小角度下差异较小。
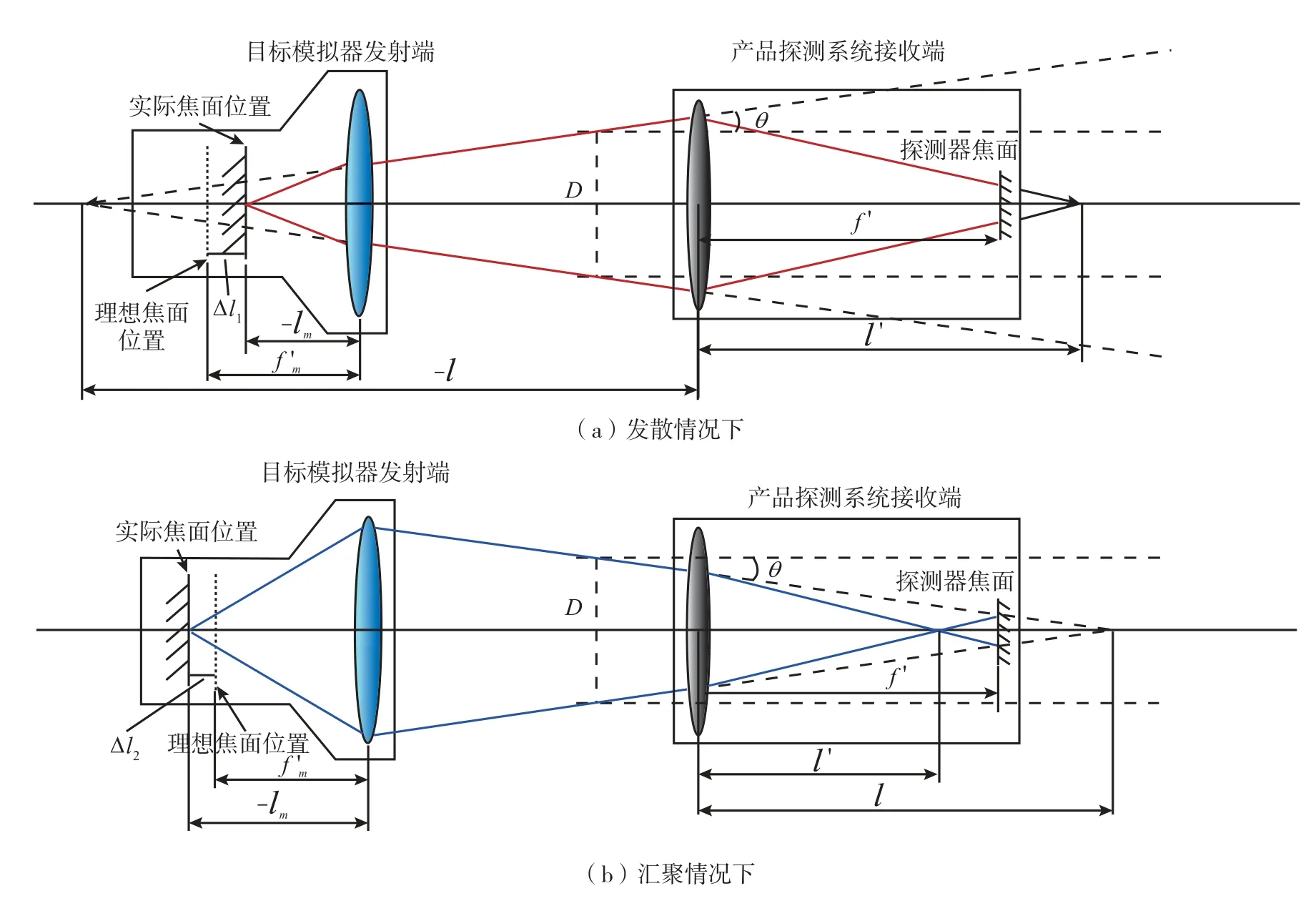
图1 两种平行光束不平行(发散或汇聚)导致离焦误差示意图Fig.1 Schematic diagram of defocus blur caused by two different unparallel beam(divergent beam or convergent beam)
由于光束不平行度相对较小,因此可认为出瞳边缘处两条光线或其反向延长线的重合点(对应图1 中的两种情况光线发散或汇聚)到出瞳的距离为探测端光学系统的物距l,可计算像距l′为:
在像面上的理想光斑大小x为:
推导得到:
式中:l′——像距;l——物距;f′——探测系统焦距;D——探测系统入瞳直径;x——探测系统光斑大小。
按照探测端光学系统可接受的最小弥散斑为探测器1 个像元尺寸计算,即由于模拟器光束不平行度引起的光斑弥散,应不大于探测器芯片1 个像元的大小。
根据探测器视场角2ω、光学系统焦距f′以及探测器像面高度h的关系为:
式中:px——像元尺寸;N——探测器像素数。
将式(4)代入式(3),令x为单个像元尺寸,可以得到:
因此,有光束发散角为:
可知,当光束不平行引起的光斑扩散大小等于1 个像元大小时,光束发散角近似等于探测光学系统瞬时视场角(IFOV),即单个像元对应的视场角。目前,常用红外探测光学系统瞬时视场角为1′左右。
3 红外目标模拟器光束不平行度测量
3.1 五棱镜测量方法原理
五棱镜具有入射光与出射光垂直的特性,能够实现精确的光束转向。依据以上特性,通过横向对准实现了纵向调焦,光束不平行度得到了进一步提高。五棱镜固定在待检平行光束前的平移台上,平移台可以沿正交于待检光束光轴方向平移。利用五棱镜法检测平行度的原理如图2所示。使用高精度自准直仪进行探测,得到经五棱镜分割后的待检光束分划像,使其对准自准直仪的刻度线。将五棱镜沿垂直于光束光轴方向移动,若待检光束严格平行,像点在自准直仪上固定不动,如图2(b)所示。否则,五棱镜从光瞳上侧移到下侧,如图2(a)和图2(c)所示,自准直仪成的像将会有横向移动,自准直仪读数即为光束的不平行度误差[12]。
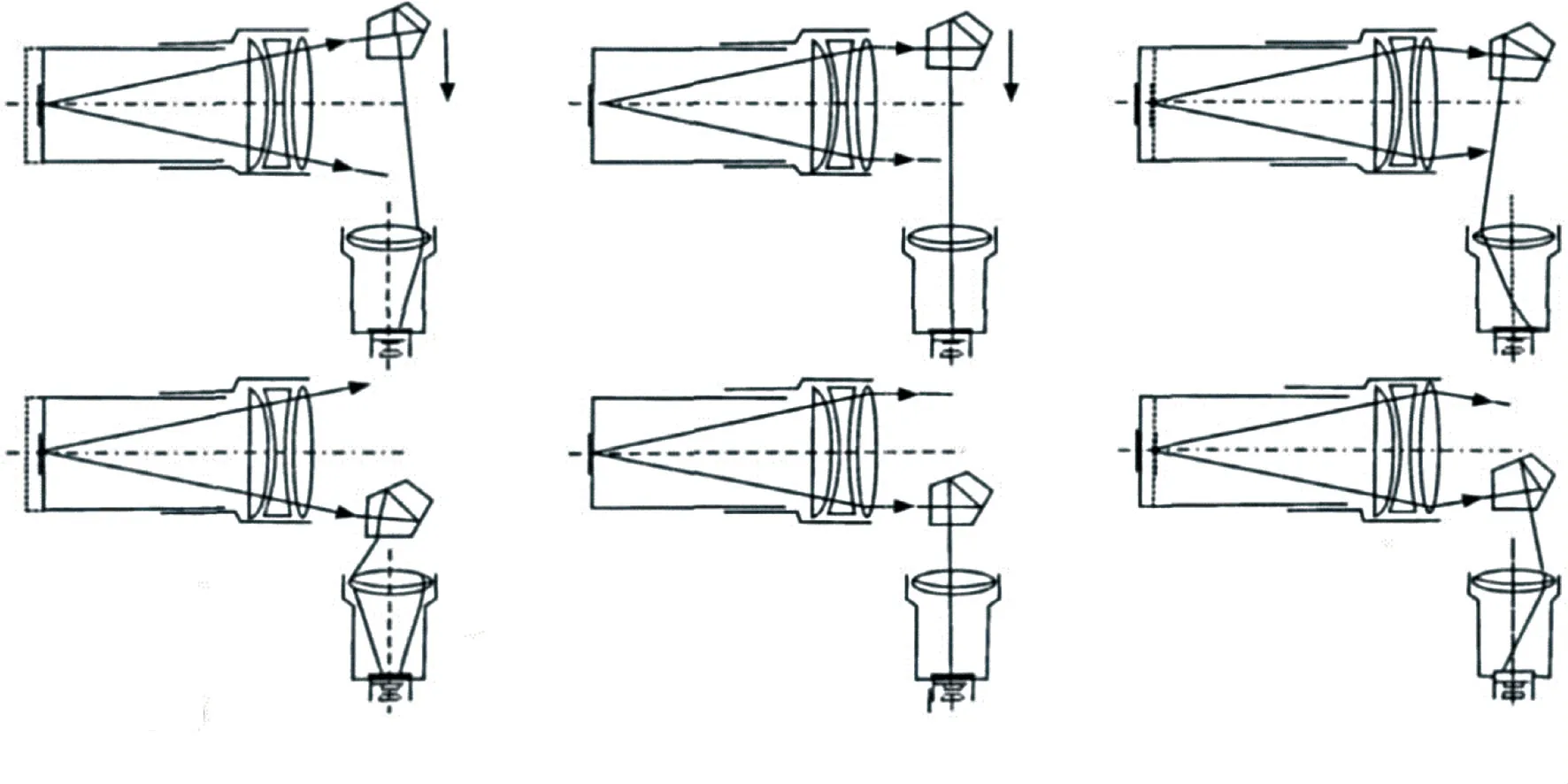
图2 五棱镜法检测平行度原理示意图Fig.2 Schematic diagram of principle of pentaprism method
3.2 红外目标模拟器光束不平行度测量方法改进
提出一种基于红外五棱镜检测折射式红外目标模拟器光束不平行度的方法,研制红外五棱镜,利用红外焦平面探测器进行亚像素拟合提取光点中心位置[13],根据光点中心位置的变化实现红外目标模拟器光束不平行度的测量。
研制的红外五棱镜为Si 材料,在(3.7~4.8)μm波段范围内,镀金表面反射率>97 %,透光表面透过率>98 %,如图3所示。经测试,五棱镜角度加工误差小于6.9 ″。加工面形光圈N=2,局部光圈ΔN=0.4。

图3 五棱镜表面反射率和透过率曲线图Fig.3 Reflective curve and transmission curve by pentaprism surface
红外光束不平行度的测试方法如图4所示,红外五棱镜放置于待检模拟器前的一维线性导轨上,沿垂直于模拟器出射光束光轴的方向平移。在红外探测器采集分析软件中,沿光点中心做一条横线标记,根据光点沿线上像素的温度分布,得到光点中心位置。为减小红外中心点的测量误差,将红外目标模拟器生成的光点控制为最小圆形光点。
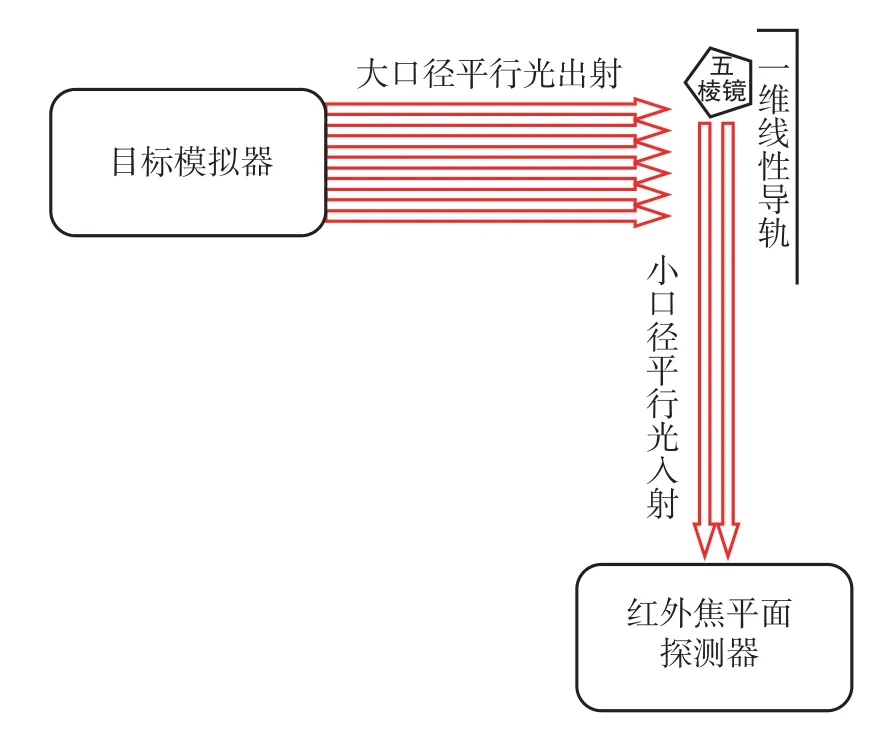
图4 五棱镜法测试原理框图(五棱镜在出瞳中心位置)Fig.4 Block diagram of measurement by pentaprism method(at the center of the exit pupil)
首先,需要左右移动一维线性导轨,根据红外焦平面探测器实时采集光点的温度变化情况,找到出瞳光束的中心位置。当五棱镜在光束中心位置时,光点中心位置对应的像素温度最高,如图5所示,并保持图中所示A 线条位置不动。
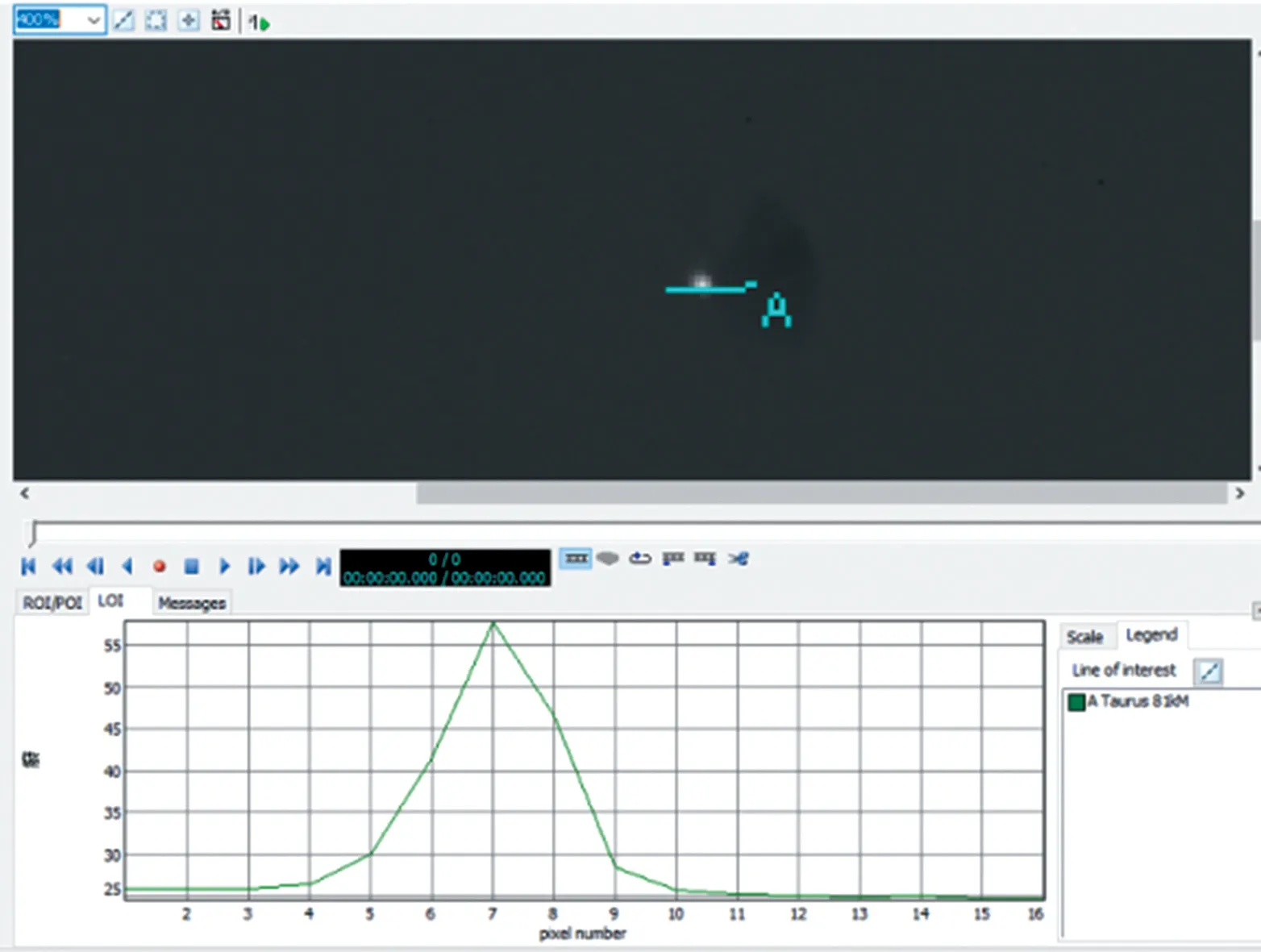
图5 出瞳中心处采集图Fig.5 Received image at the center of the exit pupil by IR imaging detector
接着根据所测红外目标模拟器的出瞳直径范围,以光束中心位置为零点,分别向左、向右移动红外五棱镜,读取红外光点中心位置的横向位移。这里所测红外目标模拟器的出瞳直径为100 mm。红外焦平面探测器采集到在出瞳-50 mm,50 mm 处的光点像素分布如图6所示。由于在出瞳边界位置,光点的温度急剧下降。以温度峰值的70 %为边界,进行光点大小提取,再根据圆形目标得到中心点所在位置的像素。
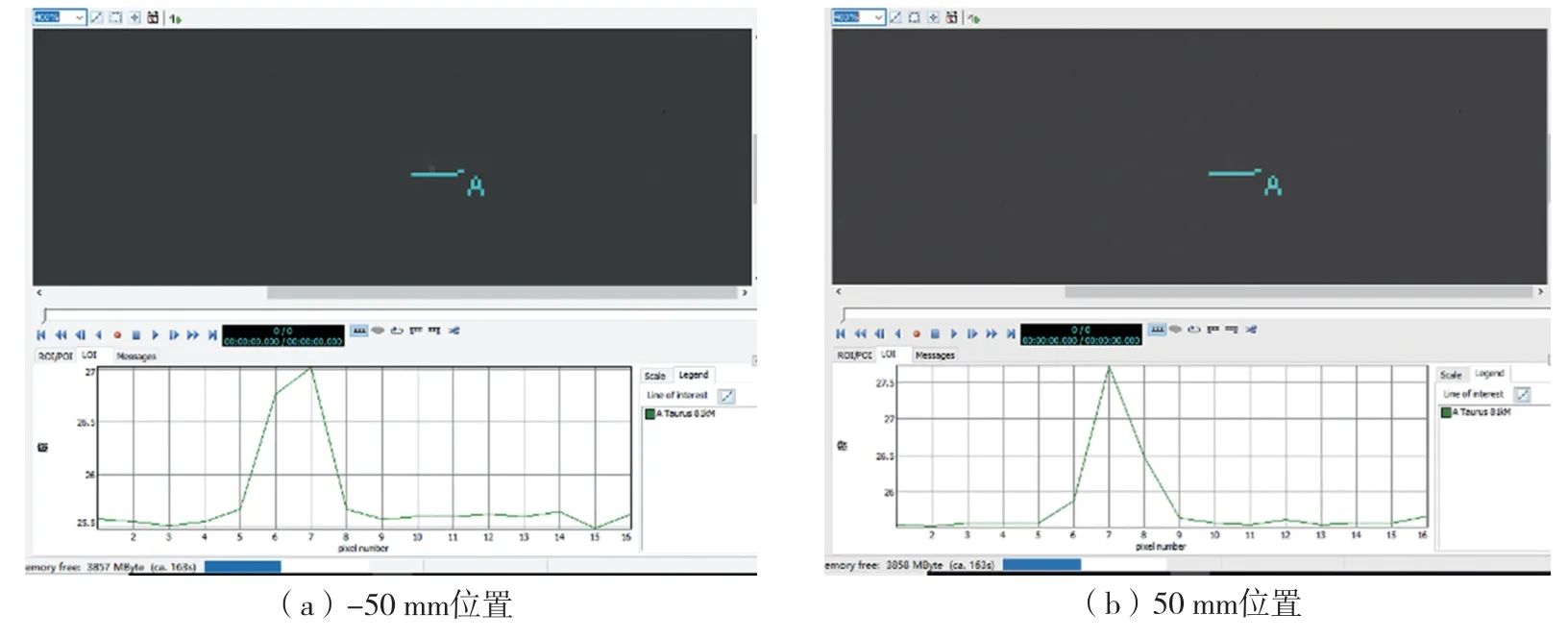
图6 出瞳-50 mm 和50 mm 位置处采集图Fig.6 Received image at the exit pupil -50 mm and 50 mm position by IR imaging detector
从出瞳直径范围内的一端移至另一端,光点中心所在像素位置的差值即为光束不平行度误差。重复6 次,测量结果数据如表1所示。6 次测量结果求平均,得到出射光束的不平行度误差为0.567 ′。

表1 不平行度测试数据Tab.1 Results of unparallelism test
3.3 红外光束不平行度测量不确定度分析
红外目标模拟器光束不平行度的测量不确定度主要包括重复测量引入的标准不确定度分量、红外五棱镜加工面形误差引入的标准不确定度分量,以及红外焦平面探测器分辨率引入的不确定度分量。
1)对红外目标模拟器光束不平行度进行测量,测量6 次,测量结果的最佳估计值通过平均值表征,则有,实验标准差s(θ)=0.129′,则此测量重复性引入的标准不确定度分量u(θ1)=s(θ)=0.129′;
2)由理论分析可知,五棱镜的角度误差仅会导致光束产生偏转,不会对光束结构和不平行度测量结果产生影响。而加工面形对光束偏角的影响较大,反射面的面型误差带来的光束偏角是折射面的3 倍,且随着通光口径的增大,光束偏角相应地增大[9]。研制的红外五棱镜加工面形光圈N=2,局部光圈ΔN=0.4,该面形误差引起的光束偏角误差估计值为1 ″,服从均匀分布(k= 3),则红外五棱镜加工面形误差引入的标准不确定度分量u(θ2)=0.01′;
3)所用红外焦平面探测器采用MCT 320 ×256焦平面探测器,视场角5.5 ° ×4.4 °。利用红外焦平面探测器参数校准装置进行MRTD 测试的方法,该焦平面探测器可清晰分辨1.67 cycles/mrad 的线对靶标,如图7所示,此时对应该探测器的瞬时视场角为1 ′,即1 个像素对应的空间角为1 ′。在读取像素点温度分布时,按照像素内线性差值的方法,将像素值读取到0.1 个像素,记为0.1 ′。因此,红外焦平面探测器分辨率引入的不确定度分量u(θ3)=0.06′。
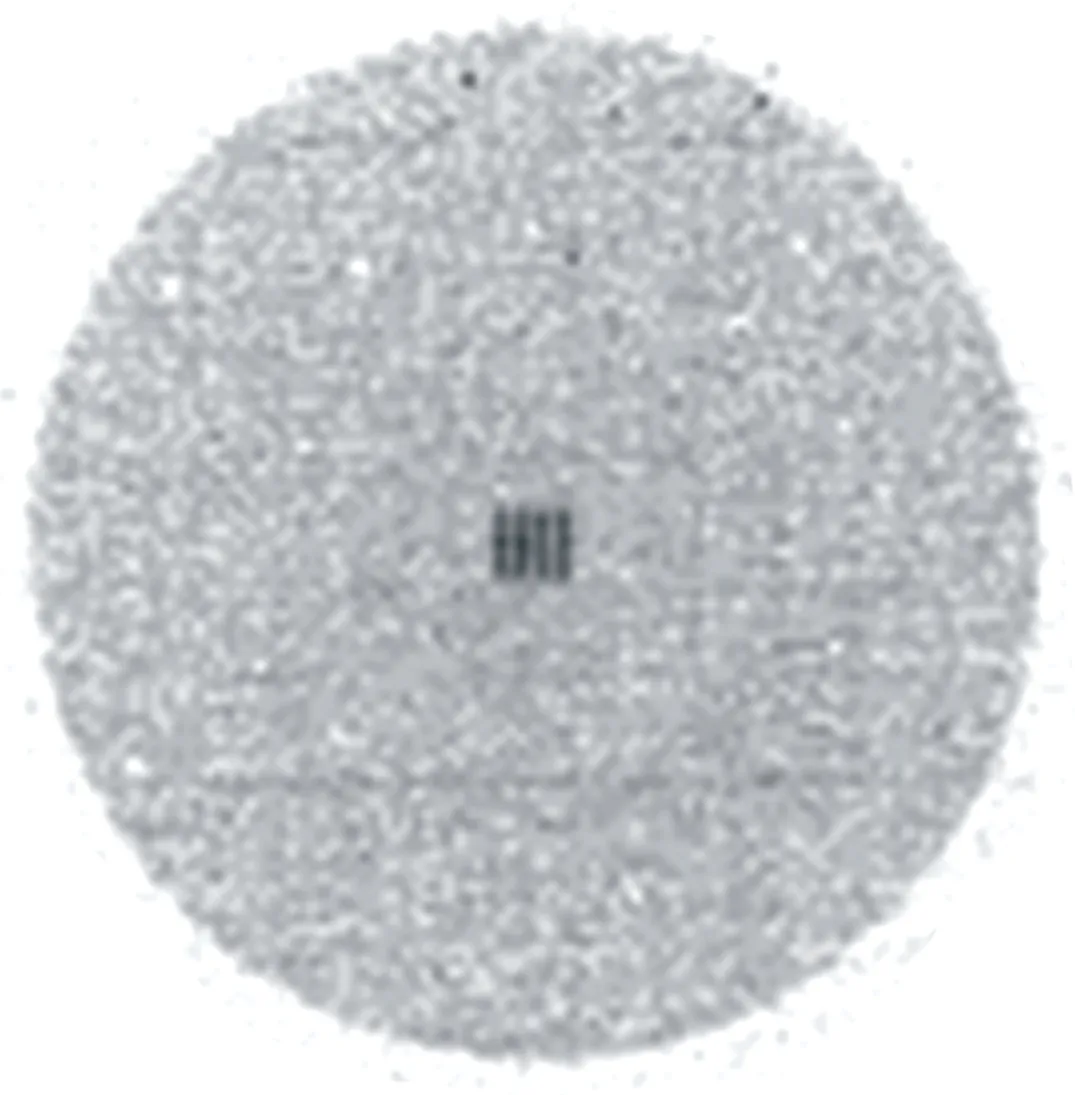
图7 红外焦平面探测器视场采集靶标图Fig.7 Target image received by IR imaging detector
综上,各不确定度分量相互独立不相关,因此合成标准不确定度=0.143′,扩展不确定度U(Δθ)=0.29′,k=2。
4 红外光束不平行度补偿
通过机理分析,红外目标模拟器出射光束的不平行主要是由于焦面发生了偏移[14,15]。由于红外目标模拟器需要安装在转台上使用,其工作力学环境较为苛刻,因此有必要对光束不平行度进行定期测试与补偿,并采用配备调焦垫片的方式进行补偿。
根据高斯公式推导出调焦垫片的精度要求Δl1为:
式中:f′m——目标模拟器光学系统焦距;D′——模拟器的出瞳直径。
实际操作中,应从理论焦面位置开始调整。首先增加或减少相同厚度的垫片,观察经过五棱镜法测量后,光点在探测器上位移的大小,位移较小的一方即为正确的调整方向;接下来继续重复上一步操作,直至增加或减少垫片后位移大小相同;减小垫片的厚度,重复上述操作,直至垫片厚度减小至Δl1,此时可以认为完成红外目标模拟器光束不平行度的补偿。
5 结束语
提出一种基于五棱镜检测光束不平行度的方法,分析了红外目标模拟器光束不平行度产生机理,在研制红外五棱镜的基础上,利用红外焦平面探测器进行亚像素拟合提取光点中心位置,根据光点中心位置的变化实现了红外目标模拟器出射光束不平行度的现场测试,并提出使用调焦垫片实现光束不平行度补偿的方法。根据本论文的光束不平行度测量方法,其测量误差主要来源于红外焦平面探测器瞬时视场角。利用此设备及补偿方法实现被测设备的光束不平行度在1 ′以内,可以满足半实物仿真的应用需求。后续可采用高精度瞬时视场角的红外焦平面探测器,提高测量光束不平行度的精确度。
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
奥秘(2021年3期)2021-04-12
少儿美术(快乐历史地理)(2020年4期)2020-02-24
学苑创造·A版(2019年4期)2019-05-10
光学精密工程(2016年6期)2016-11-07
红领巾·探索(2014年1期)2015-03-16
物理实验(2015年8期)2015-02-28
测绘科学与工程(2014年3期)2014-02-27
中国校外教育(上旬)(2009年1期)2009-02-07
中学生博览(2009年8期)2009-01-14