机载激光雷达测量系统在铁路施工中的应用
2023-04-04 09:40:18朱万里
大科技 2023年13期
朱万里
(中铁十五局集团第三工程有限公司,四川成都 610000)
0 引言
目前我国铁路建设得到了高速发展,施工单位开工时要做原地面进行复测、测算土方量,进行大临建设策划等工作,原始作业方式大多通过采用GPS 接收机或者全站仪逐点逐面测量完成土方量测算及地形复测,现场踏勘选址完成大临建设策划。传统测量工作中,在有植被覆盖的山地或密集住宅区,全球卫星导航系统GNSS 接收机易受到卫星信号的影响难以固定,而全站仪测量极易受到物体遮挡进而反复设站,导致地形复测、土方测算工作耗时耗力,效率低下,实地勘探选址多处区域人员无法到达,但是铁路开工时间紧,任务重,急需要一种新的测量方法完成以上工作,机载激光雷达测量系统的快速发展为解决这一难题提供了新的思路。
1 机载激光雷达测量系统
1.1 机载激光雷达测量系统的组成
机载激光雷达测量系统主要由飞行平台,3D 激光扫描仪(Scanner)、全球定位系统(GPS)、惯性导航系统(INS)、高分辨率的数码相机及扫描控制装置等组成[1],是一种主动遥感测量装置,可以快速、精确获取地面物体三维坐标。激光扫描仪是整个系统的核心组成,主要用来测量目标物之间的距离,GPS 主要是记录整个系统任意时刻的坐标,惯性导航系统记录飞机平台的姿态,数码相机获取目标点的真色彩,为点云着色渲染。
1.2 机载激光雷达测量系统的原理与特点
1.2.1 机载激光雷达测量系统的原理
激光器主动发射一束光脉冲,接收器准确记录光脉冲从发射到被反射回来的传播时间,计算出发射器与目标物体间的距离,结合GPS 记录的系统坐标、INS数据记录飞行姿态等数据准确计算出目标物体的三维坐标。
1.2.2 机载激光雷达测量系统的特点
机载激光雷达测量系统有以下5 个特点:①主动测量,不受光照的影响,能够全天全天候作业。②无接触测量,作业安全,可以完成人员无法到达、通行困难的地方的测量任务,保证人员安全。③高精度,多回波技术的发展使机载激光雷达测量系统的精度达到厘米级。④穿透植被,机载激光雷达技术发射的激光脉冲信号对植被具有一定的穿透能力,通过点云分类能直接获取地表真实地形数据。⑤高效率,与传统测量测量方法比,减少了工作量,节约了外业测量时间,提高了测量效率。
1.3 机载激光雷达测量系统的工作流程
机载三维激光雷达测量系统的工作流程分为准备阶段,外业数据采集,内业数据处理,数据应用4 个阶段。工作流程如图1 所示。

图1 工作流程
2 机载激光雷达测量系统实践应用
中铁十五局成达万高铁项目位于渠县境内,线路上地形起伏较大,地表多有植被覆盖,全球定位系统GPS 接收机信号弱,多处区域人员通行困难,测量难度较大,利用传统的测量方式复测土方量效率较低,且人员通行困难的地方危险系数大,本次利用机载激光雷达测量系统进行地面数据采集,运用Copre 2.0、Coprocess 2.0 完成数据处理,运用成果数据完成原地面复测、线路土方量计算、拌和站及钢筋厂选址工作。
2.1 准备阶段
确定测区范围为DK145+400—K148+700 区间,申请空域,确定道路设计参数,国家大地坐标系CGCS2000 坐标系,投影带中央子午线东经106°54′,投影高程面240m,采用1985 国家高程基准。
2.2 外业数据采集
2.2.1 外业准备
外业设备采用华测AU20 激光雷达测量系统,进入现场后分别进行架设基站,航线规划,设备调试等工作。使用变高飞行软件Copilot 进行航线规划,仿地飞行200m 航高,航宽80m,飞行速度8m/s;在采集软件中对设备参数进行设置,扫描频率为200 万点/s,点云扫描速度100r/s,点云旁向重叠率为50%等;基站采用华测GNSS 接收机作为基站,使用静态测量模式。
2.2.2 点云数据采集
完成设备安装及调试完毕后,开始作业,无人机全自动按照设定航线完成作业后返回设定的降落点,过程中人员只需要监控飞机的飞行状态,确保飞行安全,一旦遇到特殊状况,立即进行紧急返航,本次采集共计花费40min。
2.3 内业数据处理
2.3.1 点云数据生成
机载激光雷达测量系统采集的数据有GNSS 基准站数据、POS 采集数据、激光数据和影像数据。使用Copre2.0 软件完成基站数据处理、POS 数据解算及数据融合,得到WGS84 坐标系下点云数据成果,通过测区坐标转换参数获得2000 国家大地坐标系下的las 格式的原始点云(图2),利用影像数据进行点云着色渲染,得到具有RGB 颜色值的点云数据[2],让点云数据以类似于照片的形式呈现,更加形象、直观易懂。

图2 原始点云
2.3.2 点云数据去噪
点云数据受激光扫描时的姿态、环境等因素的影响,点云数据不可避免地出现一些噪点,噪点明显高于地表目标点、低于地面点,其存在会对其他点数据信息的查看和提取造成不良影响[3],通过Coprocess 2.0 软件去除因激光器的误差、空气中杂质、飞鸟等产生的漂浮在空中的噪点。
2.3.3 点云分类
铁路施工中地形复测、土方测算、前期策划大型临建设施需要用到是地面点数据,而直接采集到的激光点云数据成果包含了植被、地面建筑物等大量数据信息,无法直接运用到施工中去,因此需要利用点云分类技术筛选出所需要的地面点信息,得到地面点云数据(图3),达到施工运用的目的。Coprocess 2.0 软件采用基于坡度的点云滤波算法,核心是通过点云数据相邻点之间的坡度来分离出地面点和地物点,算法前提是假设相邻点之间的巨大高差是由地物引起的,而非地形突变,其中较高的点被视为非地面点[4],设置坡度阈值,剔除植被,房屋等点云数据,获取到精确的地面点云数据。对比原始点云图像与分类后的图像可以明显看出分类后点云去除了植被及地面建筑物信息,只保留了地面点。

图3 地面点云
2.3.4 点云数据精度校核
由于点云的位置精度主要依赖于GPS 测量系统的精度,而GPS 系统在测绘中获取的位置精度是非常可靠的,在这里仅对点云数据的高程进行校核,用GPS 接收机采取了硬质地面、稀疏植被覆盖地面、茂密植被覆盖地面3 种地形下的数据,分别与机载激光雷达点云成果数据进行比较,每组采集80 个数据,精度统计分别如表1、表2、表3 所示。
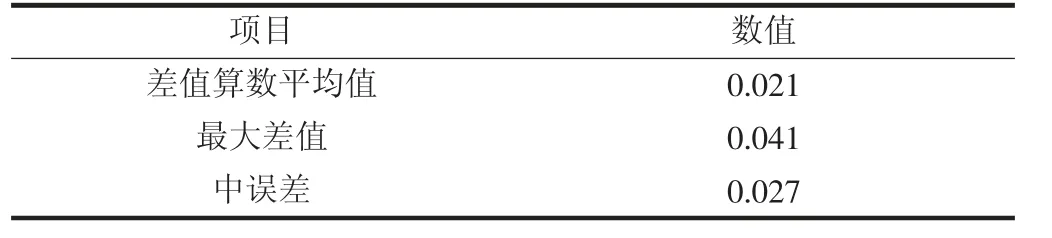
表1 裸露地面点高程精度验证统计表 单位:m

表2 稀疏植被覆盖地面点高程精度验证统计表 单位:m

表3 茂密植被覆盖地面点高程精度验证统计表 单位:m
通过分析精度验证统计表数据发现,误差较大的点多位于茂密植被覆盖的地区,其他地区高程值与实测值基本一致,最大差值为15cm,平均差值小于5cm,满足土方测算、地形复测、大型临建选址工作要求。
2.4 成果应用
2.4.1 在大临建设选址中的应用
为了更清晰直观地看清地表物体信息,先用Coprocess 2.0 软件打开原始点云数据,导入道路设计中心线DXF 格式文件,在点云中显示出线路位置(图4),便于沿线路立体查看地形信息,选择地块用于建设钢筋厂、拌和站等大型临建设施。通过查看在线路里程DK147+600—DK147+800 位置附近有一块区域,地势较高,不易积水,紧靠既有道路交通方便,是拌和站、钢筋厂位置的理想选择。选定区域后,在地面点云数据内构建三角网,进行挖填方计算,经反复验证,确定当平场高程为336m 时,区域内挖填基本平衡,挖土石59321m3,填土石61320m3,整平后可用面积39.7 亩,可以同时满足拌和站和钢筋场的建设需要。此处是标段最早施工的钢筋场及拌和站,从外业开始到选定拌和站、钢筋厂位置一共用了3d,极大减少了现场勘探选址的时间,减少了劳动强度,快速完成了大临建设选址工作。

图4 线路位置
2.4.2 在土方量测算中的应用
用Coprocess 2.0 软件将设计线路中线导入地面点云数据中,将设计中线呈现在点云数据中,可以根据需求设定提取断面点间距,横断面宽度,加密坡度值等参考值,本次设定点距离5m,横断面宽度60m,生成对应桩号的地面横断面图(图5),结合设计断面可直接计算土方量[5]。

图5 地面横断面(单位:m)
3 结语
对比传统测量,激光激光雷达测量系统具有高精度、自动化、穿透性、全天候、非接触等特点,其应用打破了传统测量方式数据采集有限、测绘范围小、工作效率低等局限,提高测量效率,保证了测量人员的安全,降低了人工成本,能高效完成铁路施工中地形复测、土方测算、大临建设等工作。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
西部交通科技(2021年9期)2021-01-11 12:55:36
中国交通信息化(2019年1期)2019-03-26 06:43:46
智能建筑与智慧城市(2018年11期)2018-11-28 09:04:14
电子制作(2018年16期)2018-09-26 03:27:00
中国资源综合利用(2017年2期)2018-01-22 02:45:02
中国房地产业(2016年2期)2016-03-01 01:25:35
全球定位系统(2015年4期)2015-02-28 12:38:14
河南科技(2014年5期)2014-02-27 14:08:44