地月空间碎片地基探测能力现状与启示
2023-03-26 07:30:46李海涛陈少伍辛晓生徐得珍
空间碎片研究 2023年4期
李海涛, 陈少伍, 辛晓生, 徐得珍
(北京跟踪与通信技术研究所, 北京 100094)
1 引言
2020年12月17日凌晨, 携带月壤的嫦娥五号返回舱成功着陆在内蒙古四子王旗预定着陆区, 标志着我国探月工程“绕、 落、 回” 三步走圆满收官[1]。 2022年中国政府发布的《2021 中国的航天》 白皮书指出: 未来五年, 中国将继续实施月球探测工程, 发射“嫦娥六号” 探测器、完成月球极区采样返回, 发射“嫦娥七号” 探测器、 完成月球极区高精度着陆和阴影坑飞跃探测, 完成“嫦娥八号” 任务关键技术攻关, 与相关国家、 国际组织和国际合作伙伴共同开展国际月球科研站建设。 深化载人登月方案论证, 组织开展关键技术攻关, 研制新一代载人飞船, 夯实载人探索开发地月空间基础[2]。 此外, 我国也已完成载人月球探测关键技术攻关和方案深化论证, 形成了具有中国特色的载人登月任务实施方案。
2022年11月16日, 美国国家航空航天局(NASA) 登月火箭太空发射系统托举猎户座飞船, 在美国佛罗里达州肯尼迪航天中心39B 发射台首飞升空, 执行不载人飞行测试“阿尔忒弥斯1 号” 任务, 开启绕月之旅, 为未来载人试飞和人类探索月球铺路。 当地时间2022年11月28日, NASA 新一代登月火箭计划“阿尔忒弥斯1号” 的“猎户座” 太空舱飞行到地球外约43 万公里的位置, 这是用于载人的航天器飞行的最远距离。 2022年12月11日, 执行美国“阿尔忒弥斯1 号” 无人绕月飞行测试任务的“猎户座” 飞船返回地球, 于美国东部时间11日12 时40 分(北京时间12日1 时40 分) 降落在下加利福尼亚半岛以西太平洋水域。 至此, 阿尔忒弥斯1 号任务圆满成功[3]。 “阿尔忒弥斯1 号” 任务完成后,NASA 就已经在为第二步, 也就是2024年开展“阿尔忒弥斯2 号” 载人绕月飞行测试作准备,而“阿尔忒弥斯3 号” 登月任务预计于2025年进行[4-6]。
2022年6月28日, 美国商业航天公司“先进太空” (Advanced Space) 的“顶石号” (CAPSTONE) 12U 立方星由商业火箭公司“火箭实验室” (Rocket Lab) 公司“电子号” (Electron) 发射, 历经通信失联、 姿态异常等故障后, 于11月14日成功成为第一个进入月球近直线晕轨道(NRHO) 的航天器, 任务后续计划开展星间无线电测量和自主导航试验验证[7]。 2022年8月4日韩国首个月球探测器由美国SpaceX 公司的“猎鹰” 9 号火箭发射入轨, 并于12月16日成功进入环月轨道[8]。 2022年12月11日,日本初创航天企业ispace 公司的“白兔-R” 探测器也由美国SpaceX 公司的“猎鹰” 9 号火箭搭载升空, 并于3月21日成功进入环月大椭圆轨道[9]。 该探测器原计划将在今年4月26日尝试在月球表面软着陆, 但在最后垂直降落阶段地面与探测器失去联系, 初步判断故障原因是器上推进剂耗尽导致无法控制着陆速度, 探测器最终撞击月面[10]。 与此同时, NASA 的重返月球计划还与一批商业航天企业进行了深度合作。 根据NASA 与美国私营航天企业签署的协议, 美国宇航机器人技术公司研制的“游隼” (Peregrine) 着陆器已完成全部测试工作[11], 计划年内作为“火神” (Vulcan) 运载火箭首飞任务(目前暂定5月), 启程前往月球[12]。 此外,年内美国私营航天企业直觉机器公司的“新星-C” (Nova-C) 着陆器也将搭乘猎鹰9 号运载火箭, 在月球南极区域表面搜寻可能存在的水冰[13]。
可见, 未来月球探测已经成为人类航天活动的热点, 特别是载人月球探测活动。 然而,月球轨道残存的废弃航天器等形成的轨道碎片对在轨飞行的月球探测器和航天员将构成严重威胁, 这也使得对环月轨道碎片的探测需求逐步提上议事日程。
2 环月轨道空间碎片现状
2.1 印度“月船1 号”
“月船1 号” 是印度空间研究组织的第一个月球探测器, 搭载了超光谱图像仪、 三维地貌测绘相机、 激光高度计、 低能X 射线谱仪等载荷,获取月球高分辨率地质、 矿物和地形图。 该探测器于2008年10月22日发射升空, 最终运行在高度为100km 的环月圆轨道, 其尺寸为1.5m ×1.5m×1.5m, 一侧安装太阳能电池板。
2009年8月27日协调世界时 (Universal Time Coordinate, UTC) 20: 00,月船1 号在与地面通信过程中失联。 失联后, 地面无法对其进行测控, 也无法获取其准确的轨道位置信息。 由于月球上布满了质量瘤, 重力场模型精度有限, 其轨道预报误差随着时间的推移不断增大。
2.2 日本月亮女神子卫星
日本月亮女神探测器于2007年9月14日,在日本种子岛航天中心发射升空, 一同升空的还有两颗小卫星 (中继子卫星Okina 或Rstar;甚长基线干涉测量子卫星Ouna 或Vstar)。月亮女神主探测器运行在距离月球100km 高度的极地圆轨道上, Okina 和Ouna 分别运行在轨道高度为100km×2400km 和100km ×800km 极轨上。 两个子卫星均为八面柱体, 尺寸为0.99m×0.99m×0.65m,太阳能电池板贴装在卫星柱面上。 2009年2月12日, Okina 撞击月球表面。 2009年6月10日,月亮女神主探测器降低轨道高度, 受控撞击月球, 任务结束。 2009年6月主任务结束后,Ouna 还在月球轨道运行, 地面已经不再对其进行轨道测量。
3 NASA 环月轨道雷达探测试验
3.1 NASA月球轨道雷达探测系统
2016年美国国家航空航天局(National Aeronautics and Space Administration, NASA) 下属的喷气推进实验室(Jet Propulsion Laboratory, JPL)为了验证地基雷达对月球轨道目标的探测能力,发起了地基雷达对月球航天器的探测试验。 2016年7月~8月, JPL 利用现有的地基行星雷达系统, 主要有戈尔德斯通太阳系雷达 (Goldstone Solar System Radar, GSSR)、 绿岸射电天文望远镜(Green Bank Telescope, GBT) 和阿雷西博(Arecibo) 行星雷达系统, 成功探测到了美国在轨的月球勘测轨道器(Lunar Reconnaissance Orbiter, LRO)、 印度失联的月船1 号和日本废弃的环月小卫星Ouna。
地基行星雷达早期主要用于开展行星雷达天文学研究工作。 其基本工作原理如图1 所示, 地基雷达大功率发射机发送调制过的雷达信号(通常为调频连续波、 伪随机码调制连续波信号),雷达信号达到探测目标后经目标反射, 形成雷达回波信号, 并最终由接收天线接收并进行处理,从而获得目标信号方位、 俯仰、 距离(延迟)、多普勒及回波功率等信息, 利用方位、 俯仰、 距离、 多普勒等信息实现对目标的轨道确定及改进, 利用距离、 多普勒及回波功率等信息实现对目标成像。
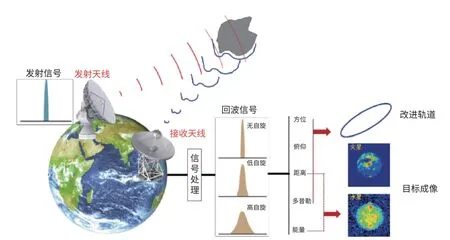
图1 行星雷达的工作原理示意图Fig.1 Schematic diagram of how planetary radar works
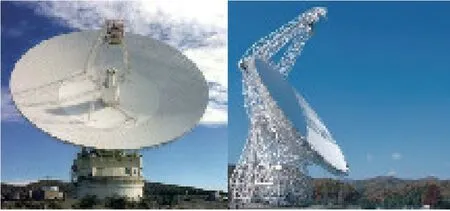
图2 戈尔德斯通太阳系雷达70m 天线和绿岸天文台100m 天线Fig.2 Goldstone solar system radar 70m antenna and Green Bank observatory 100m antenna
GSSR 位于美国加利福尼亚州南部的莫哈韦沙漠, 该雷达系统与NASA 深空网戈尔德斯通深空通信综合设施DSS -14 深空测控设备共用70m 全动天线。 GSSR 由雷达天线、 X 频段发射机和低噪声接收机组成, 上述设备配合信号处理单元进行地基雷达探测。 GSSR X 频段工作波长为3.5cm、 发射功率约为500kW。 雷达探测的位置误差为150m、多普勒误差为0.1Hz、 速度误差为1mm/s。[14,15]
GBT 位于美国西弗吉尼亚州阿利根尼山脉,其天线口径为100m, 是目前世界上最大的全动射电望远镜, 可实现85%天球覆盖。 GBT 是美国国家科学基金会(美国国会所属的独立联邦机构)投资建造, 于2001年投入使用[16]。
阿雷西博行星雷达位于波多黎各, 是美国天文电离层中心的研究设施, 是全球最强大、 最活跃的行星雷达, 主要用于无线电天文学、 雷达天文学和电离层/大气科学研究活动。 阿雷西博天线是一个固定的球面反射望远镜, 口径为305m,如图3 所示, 其可探测范围在当地天顶方向20°范围内。 阿雷西博行星雷达安装了两台发射机,其可以工作在UHF 频段和S 频段。 UHF 频段发射机工作频率为430.00MHz, 工作波长为70cm, 峰值功率为2500kW, 平均功率为150kW。 S 频段发射机工作频率为2380MHz, 工作波长为12.6cm,连续波输出功率为1000kW。 2020年8月和11月, 阿雷西博天线的辅助钢缆和主钢缆先后断裂, 同年11月9日美国国家科学基金会停止运行该设备。[17,18]

图3 阿雷西博行星雷达305m 口径天线Fig.3 Arecibo planetary radar 305m antenna
3.2 JPL 对美国在轨LRO 地基雷达探测
LRO 是目前NASA 唯一在轨运行的月球轨道航天器, 其尺寸较大且轨道位置已知, 成为地基雷达探测试验的首选目标。
LRO 是美国2004年提出的“新太空探索计划” 的首次任务, 搭载了宇宙射线望远镜、 中子探测仪、月球激光高度计、月球勘测相机、 微型射频合成孔径雷达等载荷, 主要获取全天月温图、月球大地坐标、 高分辨率彩色图像等科学数据, 同时开展月球极区水冰探测。 LRO 于2009年5月18日发射, 目前运行在距离月表约50km高度的极地圆轨道, 轨道周期为113min。 LRO 的尺寸为3.86m×2.61m×2.74m, 展开后太阳能电池板面积为4.26m ×3.2m, 高增益天线向外伸出2.59m。 2016年7月2日, JPL 利用戈尔德斯通太阳系雷达和绿岸射电天文望远镜组成双站雷达系统对LRO 进行了探测, 其中GSSR 负责发射雷达信号, GBT 负责接收雷达回波信号, 观测示意如图4 所示。
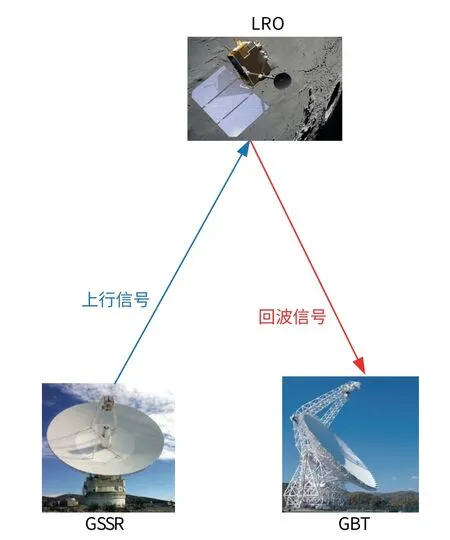
图4 GSSR-GBT 双站雷达系统观测示意图Fig.4 GSSR-GBT two-station radar system observation diagram
JPL 利用LRO 的精密轨道预报数据, 首次成功探测到了LRO 回波信号。 图5 (a) 为未经多普勒补偿的原始回波多普勒- 功率图, 表明在相应的多普勒频率范围内探测到回波, 回波持续了2.5min, 持续时间及信噪比与预期一致。图5 (b) 为多普勒补偿后的LRO 雷达回波成像结果, 显示了5min 观测弧段内回波功率随时间变化情况, 回波中心频率范围变小, 信噪比更强。
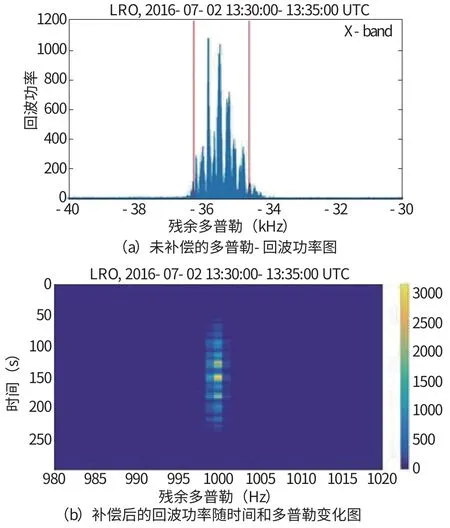
图5 7月2日GSSR 和GBT 首次探测到LROFig.5 LRO was first detected by GSSR and GBT on July 2
此外, 回波信号表现出明显的 “闪烁” 特性。 通过分析确认是由于太阳能电池板反射雷达信号造成的。 LRO 太阳能电池板面积较大(展开后4.26m×3.2m)。 当太阳能电池板垂直于雷达视线方向时, 可以高效地反射雷达信号; 而太阳能电池板平行于雷达视线方向时, 则表现为“隐身” 状态。 因此, 雷达回波的信噪比发生显著变化, 回波信号强度表现出“闪烁” 现象。
3.3 JPL 对印度月船1 号地基雷达探测
由于JPL 有LRO 的精确轨道数据, 且其尺寸较大, 相对容易探测。 在成功探测到LRO 后,JPL 尝试利用地基雷达探测其他的月球航天器以进一步验证能力, 探测目标锁定在已经失联的印度月船1 号。
虽然月船1 号确切位置未知, 但是JPL 研究人员根据先验信息判断其仍运行在200km 高度的环月轨道, 每圈轨道均会经过月球两极。 因此,JPL 研究人员在2016年7月2日将GSSR 和GBT天线指向月球北极上方约160km 处, 对月船1 号是否穿越雷达波束进行确认。
GSSR 在4.5h 内持续发送连续波信号, 并两次探测到月船1 号回波信号, 无多普勒补偿的回波信号功率结果如图6 所示。 图6 (a) 为2016年7月2日第一次探测到的结果; 图6 (b) 为第二次探测到的结果, 回波间隔为2h8min。 根据理论分析,月船1 号绕月飞行的轨道周期为2h8min。 实际轨道周期与理论轨道周期一致。 成功探测到月船1 号进一步证明了地基雷达对环月航天器的探测能力。
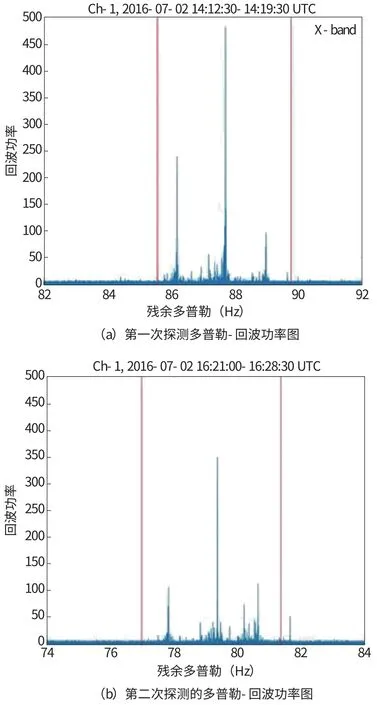
图6 7月2日GSSR 和GBT 探测到月船1 号回波功率Fig.6 On July 2, the GSSR and GBT detected the Chandrayaan-1 echo power
月船1 号穿越波束的时刻表明其平近点角相对于2009年估计的轨道漂移了约160°。 根据2016年7月2日两次探测结果, 利用目标回波信号获取了其速度和距离信息, JPL 研究人员对月船1 号的轨道进行了初步改进。
在改进轨道之后, JPL 于2016年7月3日又组织对月船1 号进行了4 次探测, 其中2 次采用连续波(仅多普勒测量) 模式, 2 次采用延迟-多普勒成像模式,月船1 号穿越波束时刻与预计结果仅差2min。 图7 (a) 为月船1 号在经过月球南极时的延迟-多普勒结果, 该图像的距离分辨率为37.5m/像素, 这也是首次在地月距离上对航天器进行雷达测距。 通过进一步处理, 得到月船1 号在经过月球南极的整个弧段内的成像结果如图7 (b) 所示。
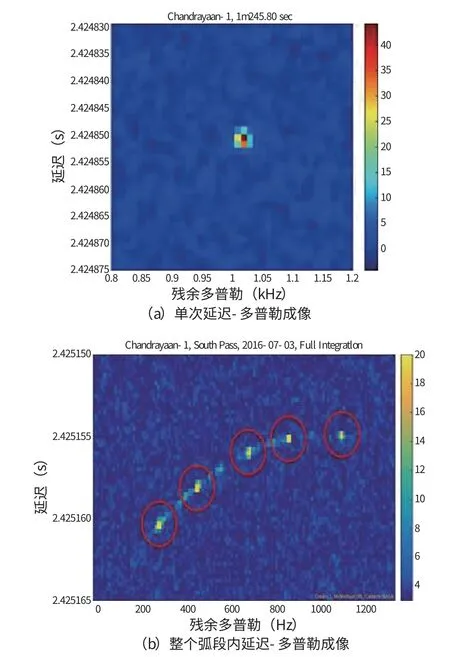
图7 7月3日GSSR 和GBT 对月船1 号延迟-多普勒探测结果Fig.7 On July 3, GSSR and GBT's delayed Doppler detection of Chandrayaan-1
通过对雷达回波数据进行处理, 获得拟合后的月船1 号雷达测量多普勒残差均方根为4Hz,对应X 频段速度误差为0.07m/s。 与典型的NASA 深空网对深空航天器的双向相干多普勒数据相比, 误差增大约200 倍, 但足以将月船1 号的轨道确定精度约束至1km 以内。
此次试验充分证明了地基雷达系统对月球目标的探测能力[19,20]。
3.4 JPL 对日本Ouna 地基雷达探测
为了进一步验证地基雷达对月球目标的探测能力, JPL 选择体积更小的日本月亮女神探测任务甚长基线干涉测量子卫星Ouna 作为探测目标。
2016年8月26日, JPL 利用阿雷西博和GBT组成的双站雷达系统进行了观测, 其中阿雷西博发送雷达信号, 并由GBT 接收回波信号, 观测示意如图8 所示。 Ouna 轨道位置误差导致其在环月轨道可能分布的空域较大, 地面天线波束宽度也只覆盖部分空域。 预估Ouna 当天最高位轨道置高度为715km, JPL 将雷达对准距月球北极约715km 高度的位置处, 获得了初步探测结果, 如图8 所示。

图8 8月26日阿雷西博和GBT 初步探测OunaFig.8 On Aug.26, Arecibo and GBT made an initial detection of Ouna

图9 佳木斯深空站66m 测控设备Fig.966m measurement and control equipment of Jiamusi deep space station

图10 喀什深空站35m 测控设备Fig.1035m measurement and control equipment of Kashi deep space station

图12 喀什深空站天线阵系统布局[22]Fig.12 Antenna array system layout of Kashi deep space station
图8 (a) 表明S 频段雷达回波的多普勒频率在-18.4kHz ~-18.0kHz 之间。 图8 (b) 为回波功率强度随时间和多普勒频率的变化情况, 雷达回波信号从2016年8月26日UTC 时间12: 06开始, 共持续约7min。 Ouna 是一个体积较小的八面柱体, 也没有展开的太阳能电池板, 其回波信号没有LRO 和月船1 号清晰。
通过地基雷达探测到LRO、 重新发现失联的月船1 号并初步搜寻到体积更小的Ouna, 证明了GSSR、 GBT 和阿雷西博构成的大型雷达设施协同工作, 可以探测和跟踪月球轨道上的小型航天器。
4 启示与建议
4.1 我国深空测控系统现状与潜力
在探月工程的推动下我国建成了全球布站的深空测控网。 探月工程二期建成了喀什35m 深空站和佳木斯66m 深空站, 探月工程三期建设了阿根廷35m 深空站, 其测控覆盖率达到90%, 具备支持各类月球和深空探测任务的多频段遥测、 遥控、 数据接收和跟踪测量等功能, 是目前世界上功能完备全球布局的三大深空测控网之一。
佳木斯深空站(北纬46°29′37″, 东经130°46′12″), 位于中国黑龙江省佳木斯市东南约45km 桦南县境内。 在该站建设了一套具备S/X双频段测控能力的66m 深空测控设备(综合考虑气象等因素暂未考虑Ka 频段), 于2013年建成并投入使用[12]。
喀什深空站(北纬38°26′34.7″, 东经76°43′40.3″), 位于新疆维吾尔自治区喀什市以南约130km 莎车县境内。 该站建设了一套具备S/X/Ka三频段频测控能力的35m 深空测控设备, 于2013年建成并投入使用[12]。
阿根廷深空站(南纬38°11′28.90″, 西经70°8′58.20″), 位于南美洲阿根廷西部内乌肯省萨帕拉市以北约80km, 站址所处的区域该站建设了一套具备S/X/Ka 三频段频测控能力的35m 深空测控设备, 如图14 所示。 2017年建成并投入运行[21]。
在2020年我国实施首次火星探测任务中, 深空测控系统为了实现4 亿千米远距离测控, 在喀什深空站新建了3 个35m 口径天线, 通过天线组阵技术将该深空站内的4 个35m 天线组成一个天线阵系统, 组阵后喀什深空站的X 频段接收能力已经达到了与佳木斯深空站66m 天线相当的水平。 此外, 在后续月球探测工程还规划在佳木斯深空站再建设一个35m 口径Ka 频段深空测控设备。
我国深空测控网采用了国际标准的S、 X 和Ka 三频段, 频率范围覆盖NASA 和ESA 深空站的频率范围, 符合国际电联和CCSDS 的相关建议,如表1 所示。 目前S 和X 频段上下行链路均可用, Ka 频段主要用于下行接收。 佳木斯深空站具备S、 X 双频段上行发射及下行接收能力, 喀什深空站和阿根廷深空站具备S、 X 双频段上行发射及下行接收能力和Ka 频段下行接收能力, 3 个深空站均配有S、 X 频段测控发射机, 输出功率为10kW, EIRP 值分别为93dBW (S 频段,35m)、 96dBW (S 频段, 66m)、 104dBW (X 频段, 35m)、 107dBW (X 频段, 66m)[23]。
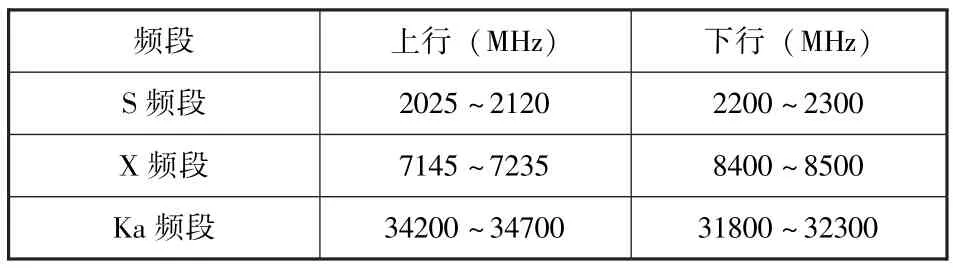
表1 深空测控工作频段Table 1 Deep space TT&C operating frequency bands
在2012年自行研制了深空测控系统S 频段和X 频段10kW 速调管发射机的基础上, 我国于2017年又实验成功了X 频段50kW 连续波速调管高功放, 已经初步具备研发200kW 级大功率发射机的技术基础。 此外, 在国家高技术发展计划支持下, 在上行天线组阵技术上也取得了突破, 实现了对同步轨道通信卫星的上行3 个天线组阵技术研究与试验验证, 达到了80%的合成效率[24]。
随着我国近年来在大口径射电望远镜研制方面的突破, 也建设了多个射电望远镜, 具体包括中国科学院国家天文台密云站的50m、 40m 射电望远镜, 武清站70m 射电望远镜, 国家天文台贵州500m 球面口径FAST 望远镜, 云南天文台昆明站40m 射电望远镜, 新疆天文台乌鲁木齐站25m射电望远镜, 上海天文台佘山站25m、 天马站65m。 上述射电天文望远镜除了开展射电天文研究外, 还承担了月球及深空探测工程任务。 密云站和昆明站作为地面应用系统的组成部分承担了月球及深空探测器科学应用数传数据接收任务,佘山站、 天马站、 乌鲁木齐站、 密云站和昆明站作为测控系统VLBI 测轨的组成部分承担了月球及深空探测器VLBI 测轨任务。 上述射电望远镜的工作频段非常宽, 主要覆盖了UHF、 L、 S、 C、X、 Ka 等多个频段[25]。
4.2 我国地月空间碎片探测系统发展建议
基于我国已有深空测控网、 射电天文观测设施和已经具备的工业基础技术条件, 构建我国地月空间碎片探测系统已经具备了技术上的可行性。 建议按照一次规划设计、 分步建设实施、 逐渐扩大规模和能力的步骤发展建设。
首先, 依托我国深空测控网在喀什深空站的一个35m 天线或者是佳木斯的66m 天线, 配置50kW 级X 频段大功率发射机, 具备雷达发射能力, 由国内射电天文观测设备的上海天马65m、天津武清70m、 北京密云和云南昆明的40m 等多个天线接收, 共同构成多基地雷达探测系统, 对月球轨道在轨航天器进行地基雷达探测技术验证, 在具备初步探测能力之后, 进一步发展更高频率和更大带宽的高分辨率探测系统。
其次, 在Ka 频段10kW 级大功率发射技术取得突破的基础上, 发展基于发射信号空间合成的宽带组阵雷达系统, 利用喀什深空站的3 个35m天线, 分别配置Ka 频段大功率发射机, 由上海天马65m、 佳木斯深空站新建35m、 以及未来将建设的长白山40m 和日喀则40m 天线进行接收,构建Ka 频段宽带高精度地月空间探测雷达系统,具备对目标进行成像探测的能力。
最终, 通过进一步扩大喀什深空站35m 天线发射组阵系统的规模, 大幅度提高发射功率, 可以实现更小目标的探测能力, 并可以将探测距离延伸到更远的日地拉格朗日点乃至可以探测距离地球数千万千米远的近地小行星。
5 结论
随着人类探索月球活动的不断深入, 甚至还会出现地月空间经济圈, 对于地月空间碎片的探测感知要求也逐步提上议事日程。 作为负责任的大国和追求航天强国目标的中国, 也应当在地月空间碎片探测领域有所作为, 为构建人类命运共同体贡献中国智慧、 中国方案、 中国力量。 加快依托已有深空测控设施和射电天文观测设备, 推动我国地月空间碎片雷达探测系统建设, 将是具有里程碑意义的标志性事件。
猜你喜欢
军事文摘(2022年12期)2022-07-13 03:11:44
飞碟探索(2022年1期)2022-03-12 14:11:20
军事文摘(2021年18期)2021-12-02 01:28:54
地震研究(2021年1期)2021-04-13 01:04:56
电子测试(2018年22期)2018-12-19 05:12:58
山东工业技术(2016年15期)2016-12-01 05:31:42
太空探索(2016年12期)2016-07-18 11:13:43
CHIP新电脑(2016年3期)2016-03-10 14:07:52
少儿科学周刊·儿童版(2015年3期)2015-06-17 04:01:41
中国新通信(2015年1期)2015-05-30 10:30:46