
基于海上养殖设施的目标与环境监测系统的设计
2023-03-24 06:44张振杰石敏徐超王雅芬
电脑知识与技术 2023年4期
张振杰 石敏 徐超 王雅芬



关键词:海上养殖设施;海上目标;海洋环境;监测系统
1 引言
随着人类海上活动越来越频繁,海洋探索越来越深入,海上目标与海洋环境监测也愈发重要。海上目标监测可以为侦察预警、智能识别等提供海量实测数据,可用于海上救援、海上执法、海上维权、目标精确打击等军民领域;实时和长期的海洋环境监测对海洋权益维护、海洋防灾减灾和海洋生态环境保护[1]等领域具有重要的意义。
由于海洋环境复杂、海域范围大,构建专用的目标与环境监测系统成本高、难度大。随着海上养殖范围从近海到远海,养殖设施更加自动化、智能化,装备了越来越多的传感器和数据传输设备。基于海上养殖设施现有的传感器,加装部分专用测量设备,可以实现对所在海域的目标和环境监测,从而降低了监测系统成本,提高了系统效率。
2 系统设计
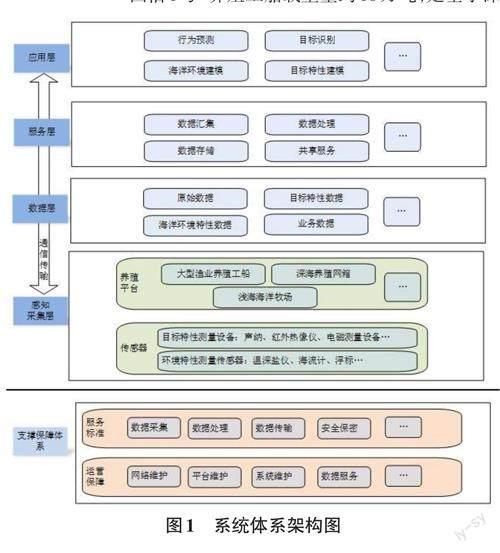
基于海上养殖设施的目标与环境特性监测系统依托海上养殖设施,基于平台现有、适应性改造和加装的多类型传感器,集成数据采集、传输、处理等技术成果,利用数据挖掘、多源数据融合和深度学习等智能化算法,实现对养殖设施所在海域的重点目标和海洋环境的数据监测。系统体系架构如图1所示,主要包括感知采集层、数据层、服务层、应用层和支撑保障体系。
2.1 感知采集层
感知采集层基于海上养殖设施已有、适应性改造和加装的多类型传感器,对设施所在海域进行目标感知、目标和环境数据采集。
1) 海上养殖设施
海上养殖设施包括:海上大型渔业养殖工船,以“国信1号”养殖工船为代表;深海养殖网箱[2],以深蓝系列养殖网箱为典型代表;浅海海洋牧场[3],以山东省海洋牧场为典型代表。
(1) 海上大型渔业养殖工船
“国信1号”养殖工船载重量约10万吨,是基于深远海工业化、规模化养殖的渔业生产平台,以大型养殖工船为信息系统搭载载体,可实现大型渔业养殖平台、海洋国防监测平台、海洋科研平台等多功能融合和统筹发展。海上大型渔业养殖工船自带导航雷达、AIS、摄像头、海洋环境监测等传感器,根据任务需求可加装红外热像仪、电磁测量设备等用于目标监测。可进一步搭载无人飞行器、无人潜航器等智能化装备[4],对于水面、水下可疑目标,前出侦查,持续跟踪。
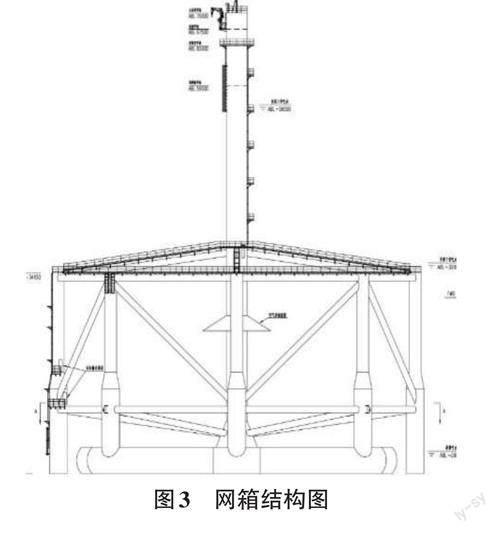
(2) 深海养殖网箱
“深蓝1号”养殖网箱是世界最大的全潜式智能网箱,如图3和图4所示,网箱整体周长180米,高65米,座底时海面以上部分高约13米,浮起时海面以上部分高约35米。网箱配套有养殖工船1艘,如图5所示,通常停泊在距网箱约1海里处。网箱配载有导航雷达、AIS、光电摄像头、温湿传感器、风向风速测量设备、大气压力传感器等目标和环境监测设备,以及卫星终端等通信传输设备。养殖工船配载有导航雷达、AIS、渔用声纳和卫星终端等设备。上述各传感器数据可接入综合信息终端进行集成,通过卫星终端传输至数据中心进行处理和存储。根据任务需求可加装红外热像仪、电磁测量设备等用于目标特性监测。
(3) 海洋牧场
海洋牧场是指在一定海域内,采用规模化渔业设施和系统化管理体制,利用自然的海洋生态环境,对海洋资源进行有计划和有目的的海上放养。目前,海洋牧场在辽宁、山东、浙江、广东等沿海省份已经实现规模化产出,在我国近海海岸沿线有较广范围分布。
海洋牧场基于平台多种类型传感器,采用智能管理控制、信息获取、物联网、云计算等技术,构建智能化综合海洋信息监测与智能管控系统。利用无人船在海洋牧场指定区域定期巡航,通过携带的水质监测仪、摄像头、侧扫声纳等传感器实现水位,温度,盐度,叶绿素,溶解氧、水下局部视频、渔业资源,牧场礁体等要素的实时、原位、在线、持续观测,并将数据实时传输到数据中心进行处理和存储。依托海洋牧场,可实现对我国近海海域重点目标和海洋环境的监测。
2) 海上目标和环境监测传感器
海上目标监测是利用声纳、可见光摄像头、红外热像仪、电磁测量设备等对海上重点目标进行预警、跟踪监视,并进行声学、光学和电磁等物理特性的数据采集。海洋环境特性监测是利用溫深盐仪、海流计、浮标等多种传感器获取风场、浪场、流场、温度、盐度、深度、海底底质、海底地形地貌、密度、腐蚀度和海面大气水气等地理、气象、水文、光、电、声、磁、压力物理场环境数据。部分传感器如表1所示。
2.2 数据层
数据层需要对不同监测平台、不同传感器的不同结构的数据进行质量控制,存储原始数据和分析整理形成的数据产品;数据层还应具备支撑系统运行与管理的业务数据。由于海洋监测具有持续时间长、范围大、监测参数多等特性,数据库结构应具有良好的可扩展性,能够以较少的更改适应监测系统需求的变化,能够向服务层和应用层提供快速查询响应、数据导入导出等服务[5]。
2.3 服务层
服务层主要包括数据汇集系统、数据处理系统和共享服务系统等。数据汇集系统实现对感知数据、行业数据和外部数据的接入获取、质量控制、标准化、分类存储;数据处理系统实现对多源数据的分析,包括目标识别、目标特性分析、海洋环境构建等处理;共享服务系统实现原始数据和数据处理结果的交换共享。
2.4 应用层
应用层利用数据挖掘、深度学习等算法对数据进行分析与处理,实现目标识别、目标特性建模、海洋环境建模等技术,以支持侦察预警、海上维权、海洋预报、防灾减灾、环境保护等领域的各种应用。
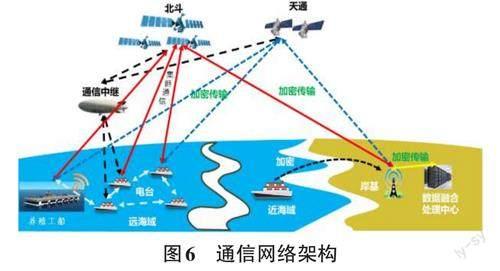
2.5 通信传输
通信传输包括岸基信息传输、海上信息传输和信息交换网络三部分,传输的信息包括海洋环境信息、目标监测数据等。通信网络架构如图6所示,在近海域,海洋监测信息可以通过岸基通信手段直接回传至数据处理中心;在远海域,综合利用空中平台、北斗卫星[6]、天通等通信手段,将海洋监测信息向数据处理中心回传。
养殖设施可接入短波、超短波、有线、WIFI、LTE等,作为信息中继平台,接收周边渔船数据信息,并通过卫星系统,将信息传回岸基数据中心。
2.6 支撐保障体系
1) 制定服务标准
制定综合信息服务体系标准规范,通过选用、修订、制定适应于信息采集、处理、传输和安全保密相关的标准,为实现海上目标与环境常态化监测提供基础技术规范。
2) 形成运营保障机制
运营服务体系主要实现海洋基础网络及信息服务平台的运营保障和工程保障。运营保障主要通过对系统管控技术、运行与服务管理流程和运维团队资源之间的有机整合,为网络的正常运行和持续服务提供有力保障。
3 关键技术
3.1 基于多源数据的目标识别跟踪
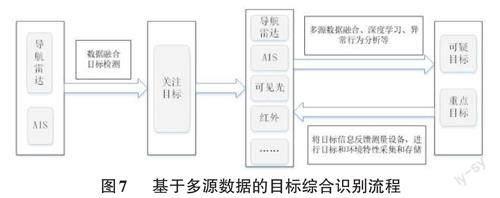
由于海上平台硬件设备性能和网络传输能力限制,不可能对所有目标进行特性数据采集和存储,因此需要通过数据处理,选择重点关注目标和可疑目标进行跟踪监测,并记录存储特性数据。
以水面目标识别跟踪过程为例,如图7所示,首先通过导航雷达和AIS数据融合,快速筛选出关注目标;然后对关注目标的导航雷达、AIS、可见光、红外以等多源数据进行融合处理;利用人工智能、异常行为分析[7]等对关注目标的多源融合数据进行识别、跟踪,筛选出重点目标和可疑目标;将重点目标和可疑目标信息反馈给测量设备,对目标进行跟踪测量,记录存储目标特性数据。
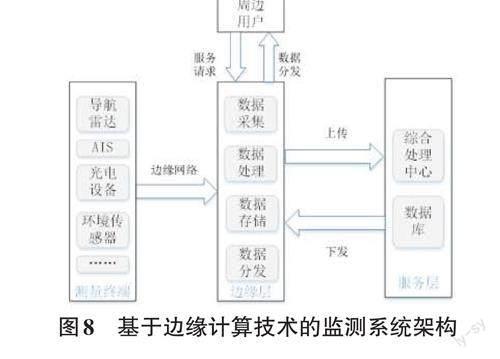
3.2 基于边缘计算技术的监测系统架构
目标特性测量设备和海洋环境监测传感器持续不断地产生大量数据,网络传输和中心化的数据处理系统难以满足海量数据的实时传输和计算需求。边缘计算是在网络边缘的数据产生侧对数据进行处理和分析,及时响应边缘侧发起的请求,减少网络时延,提高系统执行效率和性能[8]。
基于边缘计算技术的监测系统架构可分为测量终端层、边缘层和服务层。测量终端层是目标特性测量设备和海洋环境监测传感器,产生数据;边缘层靠近测量终端,完成服务层的下行数据和测量终端的上行数据的处理,也可对养殖设施平台周边用户的服务请求进行处理;服务层完成对上传数据的综合处理,储存原始数据和处理结果,也可向边缘层下发指令,完成指定任务。
4 结束语
依托远洋渔业养殖工船、深海养殖网箱以及浅海海洋牧场等设施,利用平台现有和加改装传感器,可实现对平台所在海域进行海洋环境监测、目标信息采集、可疑目标核查和重点目标监视。本文对基于海上养殖设施的目标与环境监测系统架构、系统实现和关键技术进行了研究,下一步将就系统布设作为研究重点。
