行人与自动驾驶汽车的交互研究
2023-03-22 07:39张泽宇王天博
中国机械工程 2023年5期
吕 伟 郭 伏 刘 莉 张泽宇 王天博
1.东北大学工商管理学院,沈阳,110169 2.沈阳航空航天大学经济与管理学院,沈阳,110136
0 引言
在道路交通系统中,行人是各类道路使用者中最脆弱、承受安全风险最高的一类。世界卫生组织(world health organization,WHO)发布的《2018年全球道路安全现状报告》显示,全球每年约有135万人死于道路交通事故,其中行人占比约为22%,在部分国家甚至高达65%[1]。WHO通过调查指出,行人受伤或死亡的诱因主要来自如下三个方面:驾驶人因素(如超速、饮酒、疲劳、分心驾驶等),行人因素(如分心或感知/行动能力受限等),道路交通因素(如缺乏行人安全设施以及交通法规约束等)。自动驾驶汽车(automated vehicles, AVs)作为一门近年来新兴的技术,能够通过环境感知、高精地图与人工智能等技术实现自主决策与自动控制,有望在降低交通事故发生、减少能源消耗、提高交通效率、改善行动能力受限人士出行等方面发挥巨大作用[2]。根据国际汽车工程师协会(SAE)对驾驶自动化的分级标准,L3级以上自动驾驶汽车将不需要驾驶人实时监控道路环境或执行动态驾驶任务[3],因此能够避免来自驾驶人的风险因素,从而改善行人及其他脆弱道路使用者的风险暴露水平。自动驾驶汽车实现规模化、商业化应用的前提之一是能够与其他道路使用者进行安全、准确、高效的交互,其中,由于行人行为的不确定性以及个体间的差异性,实现行人与自动驾驶汽车的良好交互被广泛认为是一项重大挑战[4]。
MARKKULA等[5]将道路交通系统中的交互定义为:至少两方道路使用者因意图在同一时间使用同一道路空间而使双方行为受到影响的情境。根据该定义,行人与汽车的交互主要表现为行人穿越机动车道时与来车(驾驶人)间相互感知、沟通以及作出决策与行为的过程。已有的关于行人与传统汽车交互的研究指出,行人的过街决策与行为主要受到汽车隐式特征的影响(如汽车速度、人车间距、汽车到达时间(time to arrival,TTA)等)[6]。同时,显式信息也广泛存在于行人与汽车的交互过程中并产生影响,包括汽车的声光信号,行人的肢体语言以及与驾驶人的手势互动、目光接触等[6]。此外,行人与汽车的交互过程也受到环境因素(如交通信号、行人安全设施、道路几何特征等)等外部因素的支配影响[4]。行人通过对来车的运行状态、驾驶人传递的信息以及环境信息进行整合,作出相应的决策并在执行过程中进行动态调整。考虑到自动驾驶汽车与传统汽车在隐式特征与显式特征方面的潜在差异,当前已有学者就行人与自动驾驶汽车在部分简单交通场景中的交互行为开展了探索性研究。
与传统汽车相比,自动驾驶汽车由于驾驶人的缺失或任务转变,将丧失一部分由驾驶人传递出的显式信息,行人的决策将更加依赖于对自动驾驶汽车隐式特征的预估和对环境要素的感知,这将会对人车交互的效率与安全造成负面影响。一方面,此前的研究结果表明行人在感知汽车的速度与距离等隐式线索时往往存在偏差,尤其是在汽车距离较远时[7]。同时,自动驾驶汽车与传统汽车可能在运动学特性方面(如让行行为与制动模式)存在差异,行人在与之交互的过程中可能与既定的期望、习惯或行为相冲突,这将进一步影响交互的效率和效果。因此,需要对自动驾驶汽车隐式线索对人车交互过程的影响开展进一步研究。另一方面,学者借助外部人机界面(external human-machine interface, eHMI)将自动驾驶汽车的驾驶模式、运行状态或预期行为等信息展示在汽车外部[8],辅助其他道路使用者感知自动驾驶汽车的状态或意图。目前,学者针对自动驾驶汽车eHMI的含义、形式、颜色与位置等内容开展了探索性研究,并在部分维度形成了初步共识。例如,在eHMI的表征含义方面,自动驾驶汽车的意图信息对其他道路使用者最为重要[9];在eHMI色彩设计方面,青色被认为具有良好的可见性、区分度以及与现行道路交通信号系统的兼容性[10]。但在eHMI的设计形式上,目前仍未形成一致的结论,仍需要进一步探索不同eHMI设计的可用性。
目前,由于实际道路环境中缺乏真正的自动驾驶汽车,部分学者基于虚拟现实(virtual reality,VR)或幕后模拟法对行人与自动驾驶汽车在简单道路场景(如单行道、停车场)中的交互行为进行了研究[11],在复杂环境场景中(如交叉路口和特殊交通状况等)行人与自动驾驶汽车的交互研究仍然相对缺乏。这导致自动驾驶汽车隐式与显式特征设计在复杂环境中的可用性及其对人车交互行为的影响仍不明确,并在一定程度上限制了自动驾驶汽车的商业化与规模化应用。
综上,为进一步完善现有研究的不足,本文借助虚拟现实和动作捕捉系统开发行人与自动驾驶汽车交互实验,探索自动驾驶汽车隐式特征(让行行为)与显式特征(有无外部人机界面)在不同道路环境中(有无行人安全设施、汽车不同驶近方向)对人车交互过程以及行人过街行为的影响。此外,本研究将生存分析方法(Kaplan-Meier分析和Cox回归)应用于行人与自动驾驶汽车的交互研究中,兼顾行人的过街结果状态与决策时间。
1 研究方法
1.1 实验材料
考虑到当前自动驾驶汽车的可获得性与安全性以及虚拟现实平台的沉浸感、安全性、可控性与经济性,本研究基于洞穴式自动虚拟环境(cave automatic virtual environment,CAVE)搭建了虚拟交互环境。该CAVE系统通过四面投影屏幕搭建一个具有高度沉浸感的三维立体虚拟仿真环境(长×宽×高:9 m×4 m×2.5 m),并借助VR交互设备(包括动作捕捉、位置跟踪、数据手套和力学反馈)使参与者获得较为真实的三维交互式体验,如图1a所示。在实验过程中,行人在虚拟的道路空间中与驶来的自动驾驶汽车进行交互;同时,基于光学传感的动作捕捉与定位系统能够将行人运动学数据(位置、速度、高度等信息)传入虚拟交互场景中,辅助基于Unity 3D开发的自动驾驶汽车感知行人位置、完成交互过程,实验场景如图1b所示。

(a)洞穴式自动虚拟环境
1.2 实验被试
为实现行人与自动驾驶汽车在虚拟现实环境中的交互,本次实验共面向社会招募了38名被试(其中18名男性,20名女性),被试的平均年龄为33.82±10.30(均值±标准差)岁。所有被试均自述身体健康、无行走障碍,裸眼视力或矫正视力正常。实验持续时长约为40 min,所有被试均对实验内容与流程知情同意、自愿参加,并在实验结束后获取一定现金报酬。
1.3 实验设计
为探索自动驾驶汽车隐式与显式线索在不同环境中对人车交互行为的影响,本研究在整体上采用组内三因素(2×2×2)重复测量设计,三个自变量分别为自动驾驶汽车的让行行为(让行/不让行,yielding/no-yielding,Y/NY)、有无行人安全设施(有/无斑马线,zebra/no-zebra,Z/NZ)以及自动驾驶汽车的驶近方向(对向/右侧,oncoming/right direction,OD/RD)。每名被试在各因素水平组合下完成6次过街任务,总计6×8=48次。此外,为进一步调查eHMI在行人与自动驾驶汽车交互过程中的提示效应,对自动驾驶汽车在让行条件下eHMI呈现与否进行了操控,即让行条件下的所有试次中,50%试次不呈现eHMI,另外50%采用青色、光带式eHMI传达汽车的减速让行意图(图1b),其他条件下均不呈现eHMI。结合已有研究中关于eHMI设计形成的初步共识以及LEE等[12]与KALEEFATHULLAH等[13]研究中的eHMI设计方案,本研究设计了位于汽车挡风玻璃边沿的青色、闪烁、光带式eHMI,用以传达自动驾驶汽车的让行意图。
在实验场景的选择与设置上,本文主要考虑了传统道路交通中交通事故的多发场景[14]以及自动驾驶背景下相关研究中使用的人车交互场景[6],实验场景设定为行人在无信号灯控制的十字路口等待过街,如图1b中黄色“×”所示。此时,一辆自动驾驶汽车从行人所在位置的右侧或对向以40 km/h的速度驶近。由于该路口缺乏信号灯、指示牌等标识,自动驾驶汽车预设的行为模式包括让行和不让行。本实验中,自动驾驶汽车在“看见”行人但对其过街意向不明确的情况下将采取减速行驶的策略,自动驾驶汽车在3 s内以恒定的加速度(-4 m/s2)减速至速度为0。汽车在让行或不让行条件下的速度曲线见图2(其中汽车的速度与加速度设置参考了已有研究中的相关参数设置[6,15])。
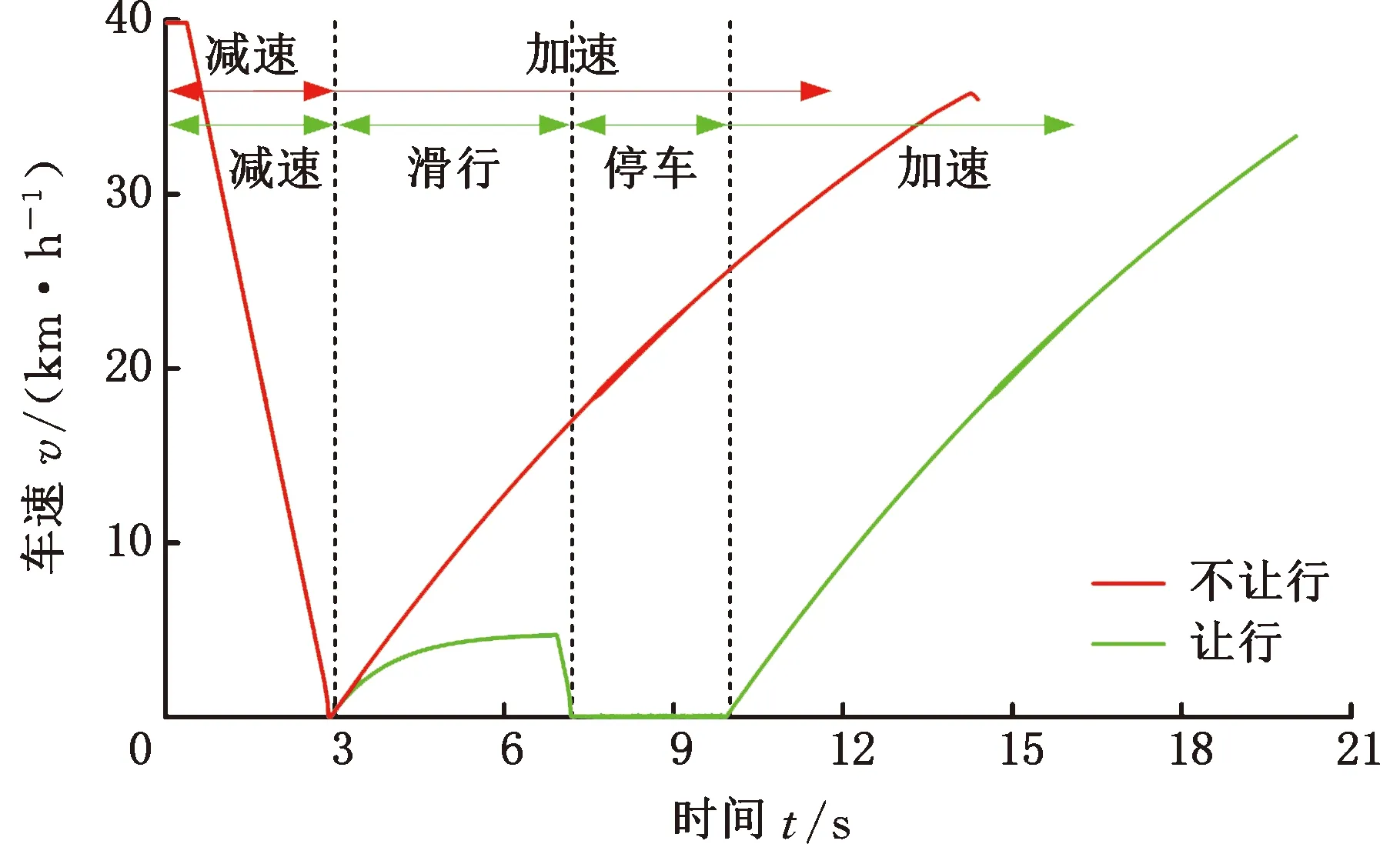
图2 自动驾驶汽车让行/不让行条件下的速度模式Fig.2 Speed pattern of AV for yielding/no-yielding condition
此后,如果该试次预设为自动驾驶汽车不让行,那么自动驾驶汽车将迅速加速驶离行人所在位置(但如果行人在汽车加速驶离过程中开始过街,则汽车将会停车让行,避免与行人发生碰撞)。如果该试次预设为自动驾驶汽车为行人让行,则汽车将会在速度降至0后继续以低于5 km/h的速度继续向前“滑行”4 s后完全制动(基于实际交通中对驾驶人行为的观察与模仿),随后完全停车(持续时长为3 s)等待行人过街。如果行人在汽车“滑行”或停车期间过街,汽车则会在行人过街后加速驶离行人的初始位置;如果行人在汽车“滑行”或停车期间未开始过街,汽车在完全停车3 s后将加速驶离行人所在位置(即行人未呈现出过街意图或行为)。此外,如果某个让行试次预设为自动驾驶汽车显示eHMI,那么eHMI将在自动驾驶汽车进入“滑行”阶段时(即第3 s时)开始呈现。
在与自动驾驶汽车交互的过程中,行人在其认为安全时即可开始过街,实验平台将记录从汽车出现到行人开始过街时刻的时间间隔(即为过街决策时间或过街等待时间)以及行人在自动驾驶汽车前或后过街(即为过街结果状态)。此外,在实验结束后,行人被要求及时完成关于实验内容与体验的电子问卷与在线访谈。
1.4 实验数据分析方法
本研究将生存分析方法中的Kaplan-Meier分析和Cox比例风险模型应用于行人与自动驾驶汽车的交互行为分析中。生存分析起源于医学领域,旨在研究终点事件和生存时间及其影响因素间的关系及程度大小,其中终点事件是指某一事件的结果,生存时间是指该事件从起点到终点的时间跨度[16]。生存时间数据主要有两类:①完全数据(complete data)(观察对象在观察窗口内发生终点事件,即时间信息是完整的);②删失数据(censored data)(未观察到研究对象发生终点事件,即时间信息是不完整的)。生存分析方法能同时兼顾事件结局状态与时间跨度,并能有效应对事件数据不完整或时间分布不明确等实证或实验研究常见问题。近年来,已有部分学者将生存分析理论与方法应用于交通领域内,研究交通拥堵时间、事故持续时间、行人过街等待时间及其影响因素相关问题[17-18]。
本次实验中,行人在与自动驾驶汽车交互的过程中,通过对道路环境信息与汽车运行状态的综合判断作出在汽车到达前或驶离后过街的决策,两种决策的结果状态及决策历经的时间均被平台自动记录。与其他研究行人过街或闯红灯的研究类似,本研究重点关注行人从汽车前过街的决策与行为。一方面,在实际道路交通系统中,行人在车前过街是具有时间压力以及动态风险的交互过程,同时对来车的运行状态产生潜在影响。另一方面,在本实验中,行人如果在车前过街,则存在可知的决策时间(即从自动驾驶汽车出现到行人发起过街时刻的时间间隔);若行人在汽车驶离后发起过街或未过街,则由于缺乏时间或任务压力,无法确定行人在汽车驶离后的决策时间。结合生存分析的理论,在行人与自动驾驶汽车交互过程中,行人从车前过街时,决策时间(生存时间)为完全数据;反之,当行人从车后过街时,决策时间为删失数据。本文将借助生存函数曲线以及Cox模型对行人过街决策时间与结果状态进行分析与论述。
2 行人与自动驾驶汽车的交互分析
2.1 描述性分析
实验结束后,通过问卷的形式调查了影响行人过街决策的因素及重要性。结果表明,约有92%的被试认为汽车的速度对其过街决策的影响最大,其次为与汽车的距离(84%)以及有无斑马线设施(63%),最后是eHMI(39%)。进一步的访谈表明,共有37名被试在实验过程中注意到了eHMI的存在,18名被试指出eHMI对他们的过街决策产生了影响,其中12名被试对eHMI的含义作出了正确的解释。
本研究中38名被试共计进行了38×48=1824次过街实验,剔除由于技术原因导致的实验数据采集失败试次52次,共获得有效实验试次1772次,各条件下的行人过街频数与决策时间如表1所示。从表1中可以看出,在自动驾驶汽车不让行的情况下,没有斑马线时,仅有13.74%的行人选择从正在驶近的自动驾驶汽车前过街,平均决策时间为2.27 s;这一比例在有斑马线设施时上升至37.10%,平均决策时间则缩短为1.79 s。而在自动驾驶主动停车让行的情况下,没有斑马线时,约有70.50%的行人从车前过街,平均决策时间为6.81 s;当道路上有斑马线时,该比例上升至84.84%,决策时间缩短至4.88 s。这表明在仅考虑行人过街决策结果状态(即从车前过还是从车后过街)时,行人的过街决策与行为主要受到汽车运行状态(例如本研究中的汽车让行行为)的影响,但行人安全设施的存在能够进一步明确冲突道路空间中道路的使用优先权,从而提高行人在汽车前过街的感知安全与过街比例,同时缩短其过街决策时间。

表1 各条件下行人过街结果状态与决策时间
行人在自动驾驶汽车让行与不让行两种条件下的过街决策时间直方图见图3a。结合自动驾驶汽车在让行与不让行两种条件下的速度模式(见图2),可以更为直观地看出行人过街决策时间的分布与自动驾驶汽车速度模式间的关系。在不让行情况下,行人的过街决策时间呈现出J形分布,约有25.40%的行人在自动驾驶汽车减速驶近过程中开始过街,其他行人则在自动驾驶汽车驶离后开始过街。在自动驾驶汽车让行情况下,行人的过街决策时间呈现出多峰分布,多数行人的过街模式表现为在汽车距离较远时或距离较近但速度较低时从自动驾驶汽车前方过街,但仍有约20.88%的行人在汽车驶离后才开始过街。此外,在汽车让行的条件下,有无eHMI时行人的过街决策时间直方图见图3b,在有/无eHMI两种情况下,行人呈现出类似的过街结果状态与决策时间分布。然而,与没有eHMI相比,在有eHMI显示自动驾驶汽车减速让行意图时,更多行人更快地作出了从汽车前过街的决策,这表明eHMI能够在一定程度上促进行人对自动驾驶汽车减速状态与让行意图的感知与理解,从而缩短决策时间并从车前过街。

(a)让行与不让行条件
2.2 Kaplan-Meier生存分析
根据上一节对生存分析中终点事件和生存时间的定义,将各自变量、过街结果状态与过街决策时间数据导入IBM SPSS Statitics 20统计分析软件中,先进行单因素Kaplan-Meier生存分析,筛选对行人过街生存率有显著影响的变量再进行多因素Cox比例风险模型回归分析。各变量的行人过街生存曲线见图4,其中横轴为等待时间(生存时间),纵轴为累积生存率(即截止到某一时刻仍未开始过街的行人比例)。
从图4中可以看出,自动驾驶汽车的让行行为、斑马线设施以及eHMI对行人过街的生存率有显著影响(风险比Hazard Ratio>1且Log-rank检验下的显著性水平pL<0.05)。其中,风险比表示协变量的效应大小,即某一因素对“生存”的影响程度,风险比值大于1在研究中意味着会提高行人过街的概率。汽车的驶近方向对行人的过街决策时间与状态影响不显著(pL=0.70)。除自动驾驶不让行情况,其他变量的各水平下,行人过街的生存曲线均遵循相似的模式,即:在0~4 s内生存率逐渐降低(行人距离汽车较远时,作出尽早、尽快过街决策);在5~8 s内生存率降速放缓(随着汽车驶近,行人过街意愿降低);在8~10 s内生存率迅速下降(行人感知到自动驾驶汽车的主动让行意图,大量行人开始过街);随后生存曲线趋于平缓,出现大量删失数据,这是由于自动驾驶汽车加速驶过行人所在位置,行人开始从车后过街。
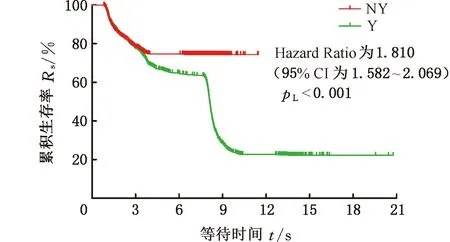
(a)让行行为
此外,从图4a中可以看出,在0~4 s内,两条生存曲线呈现出相同的下降趋势,即不论汽车让行与否,约有25%的行人会在4 s内作出过街决策(见两条生存曲线的重合部分)。随后由于让行条件下汽车的减速、停车行为,两条生存曲线在8 s后开始呈现出更明显的差异。这表明汽车运行状态对行人过街决策的影响主要体现在行人与汽车距离较近时,此时行人能够比较准确地感知、判断汽车的运行状态与意图。从图4b中可以看出,在有斑马线的条件下,累积生存率在4 s内迅速下降至60%,两种条件下的生存率差异逐步增大;在8 s后两条生存曲线间的差异缩小,这表明斑马线设施能够帮助行人明确冲突道路的优先使用权,进而在过街间隙出现时作出快速过街的决策,但斑马线的这种提示效应会在距离汽车较近时被削弱。与汽车让行行为和斑马线设施相比,eHMI变量下两条生存曲线的差异相对较小,并且主要体现在4~8 s内,结合图2中自动驾驶汽车在让行时的速度模式,此时自动驾驶汽车处于低速行驶或停车状态。图4c表明自动驾驶汽车的驶近方向(对向/右侧)对行人的过街决策影响不显著。图4d中,在有eHMI的情况下,累计生存率降速较快,表明本实验中的eHMI有助于行人理解汽车的让行意图,因而缩短了过街决策时间;但结合问卷调查结果与图3中有无eHMI时行人的过街频率可以看出本实验中eHMI对行人的提示效应很微弱。
2.3 Cox生存分析
将上述显著影响行人过街“生存率”的因素导入SPSS软件中进行多因素Cox生存分析,各自变量及其交互项的回归系数(β)、标准误(es)、显著性水平(p)、Wald统计量及风险比(Exp(β))等参数如表2中模型1数据所示。由于本研究中eHMI仅用于表征汽车的让行意图,仅半数让行试次中涉及eHMI变量,因此对让行条件下的变量(含eHMI)进行了第二次Cox生存分析,相关参数如表2中模型2所示。
Cox回归分析结果表明,与不让行条件相比,自动驾驶汽车主动让行能够显著提高行人从汽车前过街的比例,为前者的2.889倍(β=1.061,Wald(1)=41.634,p<0.001)。与没有斑马线设施相比,斑马线设施能够明确行人在道路使用权冲突路段的优先权,有斑马线时行人在自动驾驶汽车前过街的比例为无斑马线时的3.573倍(β=1.273,Wald(1)=58.557,p<0.001)。此外,斑马线设施与汽车让行行为间存在交互效应。考虑eHMI的作用时,斑马线设施同样能够提高行人在汽车前过街的概率,为无斑马线时的2.016倍(β=0.701,Wald(1)=40.208,p<0.001)。与没有eHMI相比,通过呈现于自动驾驶汽车挡风玻璃边缘的光带类eHMI来表征汽车的让行意图,能够促进行人对自动驾驶汽车运行状态与意图的感知,行人从车前过街的概率为无eHMI时的1.261倍(β=0.232,Wald(1)=4.190,p=0.041)。
3 结果讨论
本研究通过设计行人与自动驾驶汽车在虚拟现实环境中的交互实验,探索道路交通环境中有无斑马线设施、自动驾驶汽车让行行为与驶近方向以及外部人机交互界面等因素对行人过街行为的影响,运用Kaplan-Meier和Cox回归对行人过街决策结果与决策时间进行了生存分析。
本研究证实了斑马线设施以及自动驾驶汽车让行行为在行人过街决策中起主导作用,Cox生存分析结果表明,在有斑马线和汽车主动让行情况下行人从车前过街的比例分别是无斑马线和不让行情况下的3.573倍和2.889倍。从数值大小上看,有无斑马线设施对行人过街行为的影响比汽车让行行为更大,这与此前部分研究指出的“行人过街的决策主要受到汽车运动学状态的影响”结论不太一致。例如,SOLMAZ等[19]、CLAMANN[20]开展的行人与自动驾驶汽车交互实验结果表明,对行人过街决策(过街/不过街)影响最大的因素为人车间距、汽车速度或碰撞时间,其次为行人安全设施的存在与否或汽车外部人机交互界面呈现的信息。该差异是由于本研究关注行人过街结果状态(重点关注行人从车前过街的行为)的同时也考虑了决策时间因素的影响,即哪些因素促使行人从车前过街并对其决策时间产生了影响。
首先,本研究发现行人安全设施的存在会显著影响行人的过街决策(车前/车后过街)与决策时间(早过街/晚过街)。对比图4a与图4b可以发现斑马线的存在会促使行人在与汽车距离较远(或等待时间较短)时发起过街,因而在0~4 s内累计生存率差异迅速提高,此时汽车尚未呈现出明显的让行意图。这表明,斑马线对行人决策的影响主要体现在过街间隙出现的早期或距离汽车较远时,而汽车运行状态对行人的影响作用时间相对较晚、距离相对较近,这对自动驾驶汽车的让行模式设计提出的建议是在有斑马线的路段必须为行人让行。尽管这与此前部分研究指出的显式信息或环境信息主要存在于行人与汽车的近距离交互中并发挥次要作用不一致[21],但也表明生存分析方法能够有效揭示不同因素对行人过街行为的影响过程。因此,本文使用生存分析方法重点考虑行人在自动驾驶汽车前过街的决策结果与决策时间,与实际情况更为贴合,在解释行人的感知、决策与行为过程层面更为精细。
其次,本研究对自动驾驶汽车主动让行情况下50%试次的eHMI进行了操控,生存分析结果表明,eHMI虽然不是影响行人过街的主导因素,但是能够在一定程度上促进行人对自动驾驶汽车减速让行意图的理解,缩短过街决策时间,进而提高交通效率。虽然有研究指出行人的过街决策不依赖于汽车传达出的显式信息(包括eHMI),即eHMI不会成为未来自动驾驶汽车规模化、商业化应用的障碍[21],但是HABIBOVIC等[22]的调查结果表明行人在与有eHMI的自动驾驶汽车交互过程中可感知到的安全性与愉悦度更高,并且行人在经过简短的培训后能准确、迅速地理解eHMI所传达的自动驾驶汽车信息。这与本研究的发现一致,尽管在实验开展过程中未告知被试本研究中自动驾驶汽车eHMI所传达的汽车信息,但事后访谈结果表明,约有50%的被试提到eHMI对他们的过街决策产生了影响;约有31%的被试在经历若干次与带有eHMI的自动驾驶汽车的交互后,能够准确解释该eHMI的含义。然而,这一比例也揭示了本研究中eHMI设计方案中提示效应的有限性。一方面,此前的研究(如EISMA等[23]与GUO等[24])表明光带式eHMI相比于文本式或图案式eHMI在行人的感知与理解方面更为模糊,但后者在跨文化可用性与远距离可视性方面存在争议。因此,本研究中部分被试未能在有限的交互次数中感知到青色eHMI传达的含义。另一方面,近两年的研究(如HOCHMAN等[25]与LEE等[26])指出,在与自动驾驶汽车交互的过程中,行人在感知eHMI的含义时存在显著的学习效应,即随着接触同一eHMI的次数的增加,行人会强化eHMI设计特征与汽车其他隐式或显式特征的联系,逐渐理解eHMI传达的自动驾驶汽车状态或意图信息,并最终加快决策的过程。这对本文的设计启示为,事先告知行人光带式eHMI的含义或对行人进行必要的培训可能会进一步缩短行人的决策时间、提高人车交互与交通系统的效率。
此外,本文通过对行人过街等待时间进行统计分析发现,在自动驾驶汽车不让行的情况下,行人的决策时间表现为J形分布,而在让行情况下,表现为多峰分布。这与LI[27]关于行人过街仿真研究的结果一致,即行人的过街等待时间一般表现为U形分布,在特定的道路交通环境下可能衍变为J形或L形分布。一方面,行人的过街开始时间受到汽车运行状态的影响,例如,大部分行人选择在汽车低速或停车时从车前过街,或等待至汽车驶离后从车后过街(如图3直方图中6 s后数据所示)。此外,行人的过街决策时间也受到行人自身特质的影响,风险偏好的行人可能会在不充分获取车辆、道路、交通信息的情况下或在任意可能的时刻下作出过街决策[27],如图4a与图4b所示,不论汽车减速或让行与否、斑马线有无,总有约20%的行人在4 s内迅速过街。
4 结论
本研究从行人-汽车-环境系统的视角出发,探索道路交通系统中行人安全设施、自动驾驶汽车让行行为、驶近方向以及外部人机交互界面等因素对行人在与自动驾驶汽车交互过程中过街决策与行为的影响。研究通过行人与自动驾驶汽车在虚拟现实环境中的交互实验,获取行人在交互过程中的过街结果状态与等待时间,并使用生存分析的相关理论与方法进行数据分析。研究结果表明:在与自动驾驶汽车交互的过程中,道路环境中的斑马线设施、自动驾驶汽车的让行行为是影响行人过街决策和时间的主要因素,能够显著提高行人从车前过街的概率(分别为无斑马线设施、汽车不让行时的3.573、2.889倍),并且前者对行人决策的影响体现在过街间隙出现的早期,自动驾驶汽车让行行为的影响相对滞后。位于挡风玻璃边沿的光带式eHMI能够在一定程度上辅助行人感知、判断汽车的让行意图、缩短过街等待时间,但可能需要针对eHMI的功能进行必要的培训。本文的实验设计和数据处理方法为研究行人与自动驾驶汽车的交互过程提供了可行的思路。
猜你喜欢
品牌研究(2022年34期)2022-12-15
品牌研究(2022年36期)2022-01-01
意林(2021年5期)2021-04-18
——以呼和浩特市为例
交通工程(2021年1期)2021-03-16
作文周刊·小学二年级版(2020年24期)2020-07-14
学生天地(2020年29期)2020-06-09
扬子江(2019年1期)2019-03-08
小天使·一年级语数英综合(2017年6期)2017-06-07
黑龙江交通科技(2017年8期)2017-03-03
汽车与安全(2016年5期)2016-12-01