
信标数量不固定的声学定位组合导航方法及仿真
2023-03-16 10:24海军潜艇学院航海观通系高大远
数字技术与应用 2023年2期
海军潜艇学院航海观通系 高大远
中图分类号:TN967.2文献标识码:A文章编号:1007-9416(2023)02-0008-04
DOI:10.19695/j.cnki.cn12-1369.2023.02.02
收稿日期:2022-11-01
作者简介:高大远(1978—),男,甘肃民勤人,工学博士,副教授,研究方向:水下导航与组合导航。
针对水下航行器利用声学定位时可能出现无法收到足够数量信标测距信息的问题,提出一种基于单声信标测距和推算定位的组合导航方法。以航行器航速、航向信息为输入,位置为状态,信标测距信息为输出,建立组合导航滤波模型,采用扩展卡尔曼滤波器进行组合导航信息滤波。通过仿真对本方法应用特性进行验证分析。研究表明,本方法可以有效应对信标数量较少或航行器有效接收信标应答信号数量不固定的情况,具有良好的水下定位效果。
水下平台航行或工作常采用水声定位方法获取位置信息。由于水声定位方法其具有可控性好、精度高等特点,在海洋工程和科学考察活动中得到广泛应用,目前已有较多货架产品。其中长基线定位系统(Long Base Location, LBL)具有定位范围大、精度高的特点[1,2]。LBL定位原理与卫星定位原理类似,在海底布设至少3个声信标(一般4-6个),精确测量其位置作为空间基准。在定位时,航行器安装的声学问答机发射信号,海底声信标发射应答信号,航行器根据信号往返的延时,算出距离信息,根据航行器到多个声信标的距离,即可解算其位置,实现导航定位。
但由于海底环境的制约,有时难以布设足够数量的信标;海洋环境的复杂性使得水下航行器也难以接收到所有信标的应答信号。在实际定位时,航行器与各信标距离不同,也无法同时接收到所有应答信号,考虑到航行器的动态航行特性,此时利用应答信号进行解算带来定位误差。
针对上述情况,需要一种利用较少数量信标的水声定位方法,同时此方法还应能适应多个信标以及信标应答信号不同时到达的情况。
对于此类问题,已有利用较少数量声信标(1或2个)进行定位方法的研究[3,4],基本思想是航行器通过在声信标周围航行,获取航迹上多个点上声信标的距离,利用几何方法解算航迹相对声信标的相对关系,从而计算航行器位置。这一方法,类似匹配定位,是一种非实时的方法,对航迹约束较多,目前并未广泛使用。
本文研究一种利用航行器推算定位信息与单声信标测距信息的组合导航定位方法。采用此方法,航行器在只接收到一个声信标应答信号的情况下仍然可以进行定位,在多个信标组成的声学定位基阵内,可以根据所接接收的应答信号分别进行定位计算,不再要求接收到所有信号后才进行定位计算,放松了对声信标数量的要求。这一方法对工程应用具有一定的实用价值。
1 单信标测距/推算定位组合导航建模
一般水声定位方法利用航行器到多个信标的测距信息,通过几何解算计算航行器位置。当信标数量较少、测距信息存在误差时,位置解算无法进行或存在较大误差。考虑到水下航行器一般带有罗经和计程仪等测向、测速设备,可进行推算定位,因此通过建模可将二者结合实现定位。
1.1 推算定位模型
航行器水下航行,深度固定且已知,测量航速V和航向C,则可建立一般推算定位模型如式(1)、式(2)所示:
其中,λ、φ为航行器经纬度,R为地球半径,vN,vE分别为载体的北向速度和东向速度,如式(3)所示:
水声定位时,问答/应答信号作用距离一般不超过十几公里,在此局部范围内,可以建立平面直角坐标系,航向定义为航行器与坐标系y轴之间的夹角,则模型转化如式(4)、式(5)所示::
在考虑航速和航向测量误差,并对方程离散化后,可得推算定位方程如下:
其中,ωv和ωc表示航行器速度和航向测量过程中的测量误差,状态(xk+1,yk+1)表示航行器当前在直角坐标系中的位置,(xk,yk)表示上一时刻航行器位置,ΔT为推算时间步长。由于航速和航向误差的存在,推算定位的误差不断增大,需要利用水声定位信息校正。
1.2 水声测距与定位模型
以4个信标的水声定位为例,仍然考虑平面直角坐标系。假设海底信标的位置坐标为(xbk,ybk,zbk),k=1,2,3,4,航行器的位置坐标为(x,y,z),测量得到的航行器到信标距离为Lk,则可建立距离方程如式(8)所示:
进行水声定位时,利用多个信标的测距信息,即可计算航行器位置[2],进而对推算定位信息进行校正。
当声学定位系统信标数量较多时,公式(8)中的方程数量增多,可充分利用冗余信息,得到精度较高的定位解;但当可测距信标数量较少时,方程的个数少于待求变量个数,则无法计算得到定位信息。此时需将推算定位模型公式(6)和公式(7)与水声测距模型公式(8)结合,利用卡尔曼滤波等方法进行组合导航对位置进行最优估计。
2 单信标测距/推算定位组合导航滤波方法
如图1所示,航行器利用航速、航向信息对位置进行推算,由于存在测量误差(常值误差和随机干扰),其定位误差随时间累积而不断增加,导致位置信息不可信。当其接近信标,能够测得信标的距离时,若只能接收一个或较少数量的信标信息,则无法单独完成定位计算。此时,考虑推算定位已经给出了部分位置信息,将其充分利用,则可实现利用单信标测距信息进行定位。
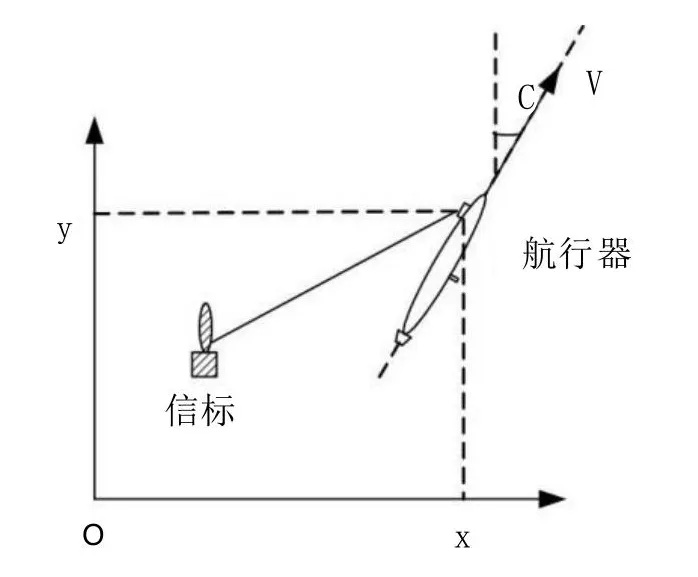
图1 单信标测距/推算定位组合导航示意图Fig.1 Combined navigation method based on single beacon/dead reckon
将公式(6)、公式(7)、公式(8)进行结合,构成组合导航模型,利用扩展卡尔曼滤波方法可实现组合导航定位,方法如下。
首先将模型进行重写,对某一时刻k,令状态和输入如式(9)所示:
输出如式(10)所示:
其中(xb,yb,zb)是单信标的位置坐标。
则过程模型如式(11)、式(12)所示:
对于式(11)、式(12)来说,需在实际航迹附近线性化,计算雅可比(Jacob)矩阵。
对于输入,雅可比矩阵计算公式如式(13)所示:
对于测量方程,其雅可比矩阵可写为如式(14)所示:
对于上述模型,利用扩展卡尔曼滤波进行信息处理。
假设在第k时刻,已得到对当前状态的估计值,估计方差阵为Pk,当测量到航向、航速后,则利用过程模型公式(11)进行状态的一步预测,得到如式(15)所示:
方差的一步预测如式(16)所示:
其中,Qk是随机干扰[ωVkωCk]的方差。
然后,基于状态的一步预测,利用公式(10)对时延测量信息进行预测,记为Zk+1。
当水声定位系统检测到应答信号,给出实测距离信息,则可进行信息修正,对本时刻状态和方差进行估计,公式如式(17)、式(18)所示:
其中,Kk+1是增益矩阵,如式(19)所示:
其中Rk+1是距离测量误差的方差。
这样公式(15)-公式(19)即单声信标的组合导航卡尔曼滤波处理过程,实现航行位置及其误差方差的估计。
当有多个信标时,既可以将公式(12)和公式(14)改造为多维表达式(维数等于信标个数),同样采用卡尔曼滤波计算;也可以仍然采用单信标组合导航方法,在每一次测量得到某一信标的距离信息时,即与实时推算定位信息进行组合导航计算,而不用等到所有信标距离信息均获得以后再进行计算,这样放松了水声定位对信标数量的要求,实现了可用信标数量不固定情况下的水声定位。
从此过程可以看出,通过将推算定位模型与单信标测距模型相结合,采用卡尔曼滤波的预测-校正体制信息处理方法,实现了推算定位信息与单信标测距信息的耦合,达到了仅使用单信标距离测量信息也可实现水声定位的功能。
3 仿真分析
对上述过程进行仿真分析,考虑如下两种情况。
(1)单信标情况,仿真条件如下:信标位置为(-2000,-3000,-1000),单位为米(m,下同),称为信标1。航行器初始位置为(-3000,-1000,-300),航行器水平航行,航速2m/s(约3.9节),航向120度。航行推算定位,初始位置误差设置为x,y方向具为方差为500m的高斯白噪声,航向测量误差包括1度的常值误差和方差为0.5度的高斯白噪声;航速测量误差包括0.1m/s的常值误差和方差为0.1m/s的高斯白噪声。信标距离测量误差为方差5m的白噪声。仿真结果如图2、图3所示。

图2 航行器定位轨迹(单信标情况)Fig.2 Positioning trajectory of UUV(single beacon)
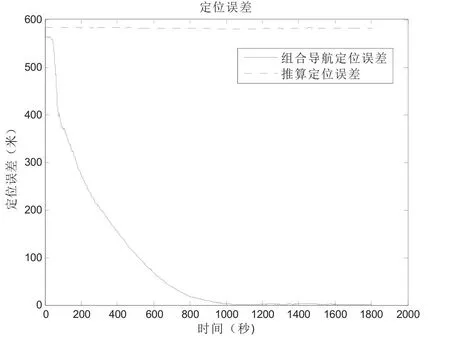
图3 导航定位误差曲线(单信标情况)Fig.3 Error of position(single beacon)
从仿真图可以看出,对于近600m的初始位置误差,在推算定位中,定位误差缓慢增加,而组合导航可使位置误差迅速减小,随着测量不断进行,组合导航定位误差不断减小,最终定位误差稳定小于5m。
(2)有多个信标的情况,假设有2个信标(多于2个信标的水声定位效果比较理想,这里不考虑),另一信标位置为(-2500,-1000,-800),称为信标2。航行器航向135度,速度2m/s。假设在航行前600s和后600s,分别只接收信标1和信标2的信号,在航行过程中间600s,受海洋环境的影响,航行器以等概率随机接收信号1、信号2或2个信标的信号,仿真结果如图4-图6所示。
从图4和图5可以看出,在可接收信号的信标数量不固定的情况下,利用单信标测距和推算定位组合导航方法,仍然能够有效地对航行器进行定位,定位误差逐渐收敛。

图4 航行器定位轨迹图Fig.4 Positioning trajectory of UUV
从图6可以看出,航行中间阶段,航行器接收信标信号的情况具有随机性,对照图5中相应时间段的误差曲线,可以看出,采用本文方法,在接收信标信号具有随机性、可用信标数量不固定的情况下,定位误差依然能够较好的收敛。

图5 导航定位误差曲线Fig.5 Error of position
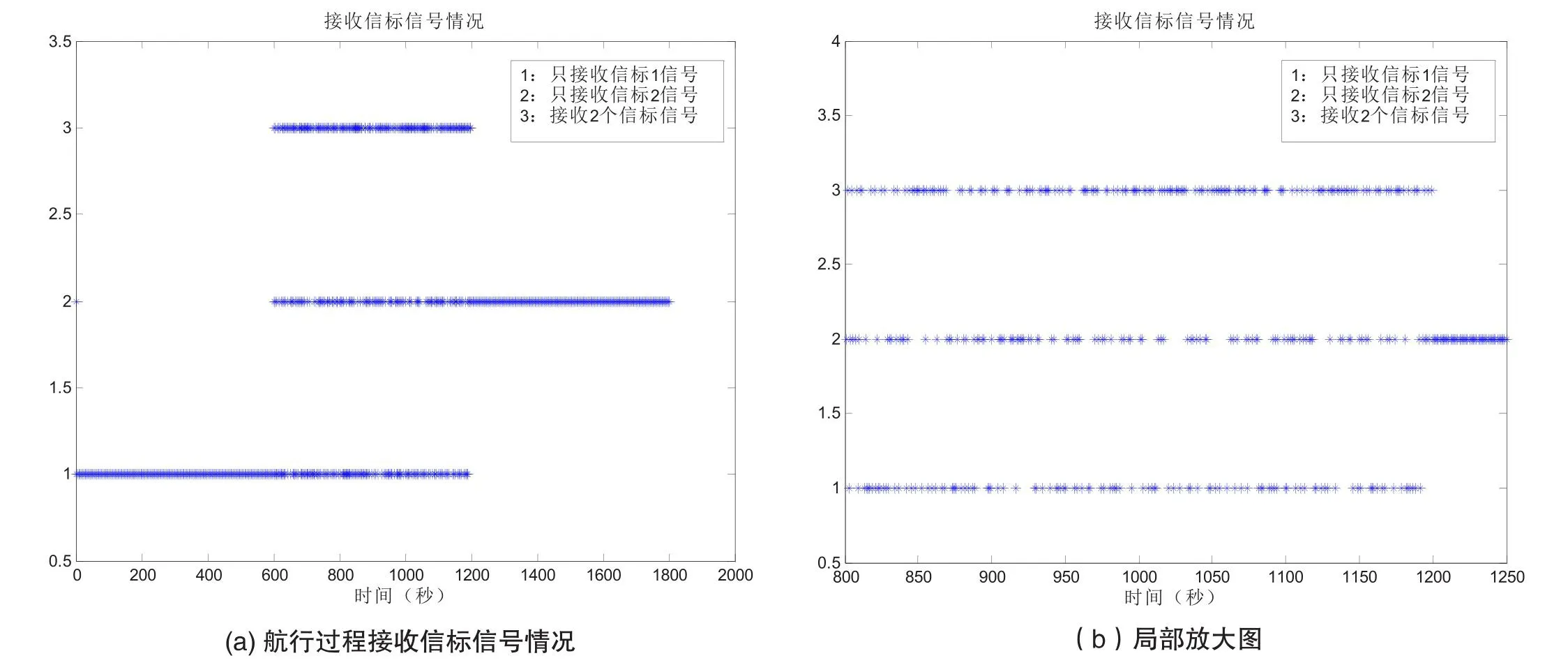
图6 航行器接收信标信号的情况Fig.6 Beacon receive condition of UUV
在多次仿真中还发现,航行器的航迹对组合导航定位结果有一定影响,特别是当只能接收一个信标信号时。对照图3和图5的初始阶段,可以看出第二情况仿真时,由于航迹更靠近信标1,导致定位误差收敛相对较慢。这一现象可从控制理论对其进行解释[5],是因为在此航迹情况下,系统的可观测性较弱,因此组合导航定位误差收敛较慢,在进入第二阶段后,可收到不同信标信号或可收到2个信标的信号时,收敛速度加快,效果改善。
4 结语
本文所提出基于单信标测距信息/推算定位的组合导航方法,对于单信标声学定位具有较好效果。在实际水下声学定位的应用过程中,受海水声波传输特性复杂的影响,声信号接收具有较大的不确定性,容易导致可接收信号的信标数量不够、信号接收不同步等情况。本文的方法具有一定的通用性,可以有效应对这些情况,具有较大的应用价值。
引用
[1]付进.长基线定位信号处理若干关键技术研究[D].哈尔滨:哈尔滨工程大学,2007.
[2]田坦.水下定位与导航技术[M].北京:国防工业出版社,2007.
[3]张福斌,张永清.一种利用单信标修正AUV定位误差的方法[J].鱼雷技术,2012,20(1):38-41.
[4]曹俊.基于单信标测距的水下载体定位研究[D].哈尔滨:哈尔滨工程大学,2017.
[5]严卫生,房新鹏,崔荣鑫.单信标测距AUV水下定位系统观测性分析[J].中南大学学报(自然科学版),2012,43(8):3085-3090.
猜你喜欢
科学(2020年3期)2020-01-06
铁道通信信号(2018年3期)2018-04-19
电子制作(2017年7期)2017-06-05
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
系统工程与电子技术(2016年7期)2016-08-21
长春理工大学学报(自然科学版)(2015年4期)2015-12-07
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
水道港口(2015年1期)2015-02-06
太空探索(2014年1期)2014-07-10
