
基于极化神经网络的雷达舰船检测识别方法
2023-03-15 02:04林晓晶肖鹏浩王海鹏
上海航天 2023年1期
林晓晶,肖鹏浩,何 良,王海鹏
(1.复旦大学 信息科学与工程学院 电磁波信息科学教育部重点实验室,上海 200433;2.北京华航无线电测量研究所,北京 102445)
0 引言
雷达利用电磁波的转发、二次辐射和目标的固有辐射实现目标探测,具有全天时、全天候的工作特点及高灵敏度远距离探测的工作优势,在军事领域与社会生产中有着广泛的应用。
全极化相参雷达集成相参雷达和极化雷达两者的优势,其具有更强的探测识别能力。相参体制雷达发射脉冲间的载波相位确定,能够基于目标和雷达间相对运动产生的多普勒效应,通过相参积累获得目标的速度分辨能力。极化雷达则是基于电磁波的极化特性和不同材质表面对电磁波极化改变具有差异的原理,获得探测目标的极化特性,在极化域对目标特性做出详细描述。
海面场景下的舰船目标检测识别是全极化相参雷达应用的重点领域,基于全极化相参雷达距离-多普勒(Range Doppler,RD)回波数据的海面目标检测识别任务要求,在RD 回波上给出目标的位置和类别。相较于可见光数据,雷达RD 回波数据中目标区域占比小,局部纹理、形状、颜色等特征较弱,且由于雷达数据采集方式的制约使回波数据在部分重要场景信噪比偏低,增加了海面舰船目标检测识别任务的难度。
传统目标检测识别流程将目标的检测识别分为两个独立的阶段。在检测阶段,通常使用基于杂波统计理论的恒虚警率(Constant False Alarm Rate,CFAR)检测算法及其变体确定目标位置;在识别阶段,基于检测阶段提取到的待分类目标计算其时、频、极化等多域特征,最后构造分类器确定目标类别。当海况环境复杂、目标多样时,基于杂波统计的检测方法通常难以选择合适的杂波模型[1-5]。构造分类器时同样也面临着特征参数选择多样、阈值设置困难和复合判断条件构建复杂的问题。
近年来,深度学习理论的飞速发展推动目标检测与识别领域的深刻变革[6-9]。深度学习技术使用卷积神经网络(Convolutional Neural Networks,CNN)提取目标的深度特征,深度特征具有强大的描述能力,使得深度学习技术在光学目标检测识别领域的应用中取得巨大成功。同时也有不少学者尝试将深度学习技术引入雷达目标检测识别领域,取得了一定的研究成果[10-17]。2017 年COZZOLINO等[11]设计了一种单阶段的基于CNN 的舰船检测结构,实验表明模型在有“鬼影船”的情形下显著优于CFAR 方法,该方法计算复杂度低,但是泛化到大规模数据集时存在性能下滑的风险;西安电子科技大学周峰等[12]与鲁兵兵[13]在极化合成孔径雷达(Polarimetric Synthetic Aperture Radar,POLSAR)数据上使用双区域建议网络(Region Proposal Networks,RPN)做舰船检测,检测性能比CFAR 类算法有显著提升,但该方法存在参数量大、易过拟合的问题;2020 年金侃等[14]提出P2P-CNN(Patch-to-Pixel Convolutional Neural Network)用于舰船像素分类,采用稠密块(Dense Block)结构结合多层语义信息并利用空洞卷积增大感受野,该模型在采用的所有数据集上,分类性能均优于其余参与测试的算法,但该算法并未涉及如何利用目标的极化信息。上述工作证明了深度神经网络对雷达数据建模的有效性,但是对涉及如何利用全极化雷达回波数据的极化信息并将其更好地迁移融合进深度神经网络结构中的相关研究有所欠缺。基于此,本文提出了一种基于深度学习的全极化相参雷达RD 回波数据目标检测识别算法,其主要贡献如下:
1)针对雷达回波数据的全极化特性,提出一种基于全极化相参雷达RD 回波数据的融合极化特征的极化深度学习目标检测网络。
2)针对雷达回波数据不同的极化特征进行对比试验,验证极化信息与相关极化特征的性能差异,并根据不同的目标、场景与性能要求择优选取极化特征提取算法。
1 算法设计
选用两阶段的Faster R-CNN(Faster Region CNN)作为基础检测识别框架,在保持检测识别速度的前提下,优化全极化雷达回波数据海面场景目标检测识别的精度。设计cascade 级联结构,通过级联多个检测识别模块迭代精调预测结果,每个检测模型采用不同的交并比(Intersection over Union,IoU)阈值用以选取参与训练的正负样本,且该阈值呈现逐级递增的趋势;针对搭建特征金字塔网络(Feature Pyramid Networks,FPN),实现极化雷达信号多尺度特征学习与融合[18-19]。由于全极化雷达回波数据中的目标区域占比微小,目标取值动态范围大,且海面环境复杂,这极大地增加了雷达目标检测识别任务的难度。因此本文充分考虑全极化雷达回波数据的极化特性,将极化信息融入深度神经网络,更好地实现对雷达目标与干扰、目标与海杂波背景的差异化特征提取,最终设计并构造出全极化雷达回波数据目标检测识别算法结构,如图1 所示。首先,将原始的全极化数据送入极化特征预提取模块(Polarimetric Feature Extractor,PFE)来提取极化特征;其次,将提取的极化特征输入以Faster R-CNN为基础的检测识别框架并融合FPN 结构的级联检测模型Cascade FPN R-CNN,不断迭代精调预测结果。其中,IoUth=0.7、IoUth=0.6、IoUth=0.5表示检测模型的交并比阈值分别为0.7、0.6 与0.5,conv1~conv5 为CNN 网络根据特征图大小划分的不同阶段,P2~P5为金字塔结构的特征层,RPN with FPN 表示将FPN应用于RPN 网络,RoI Pooling(Region of Interest Pooling)为感兴趣区域特征提取网络,FC layer 为全连接层。
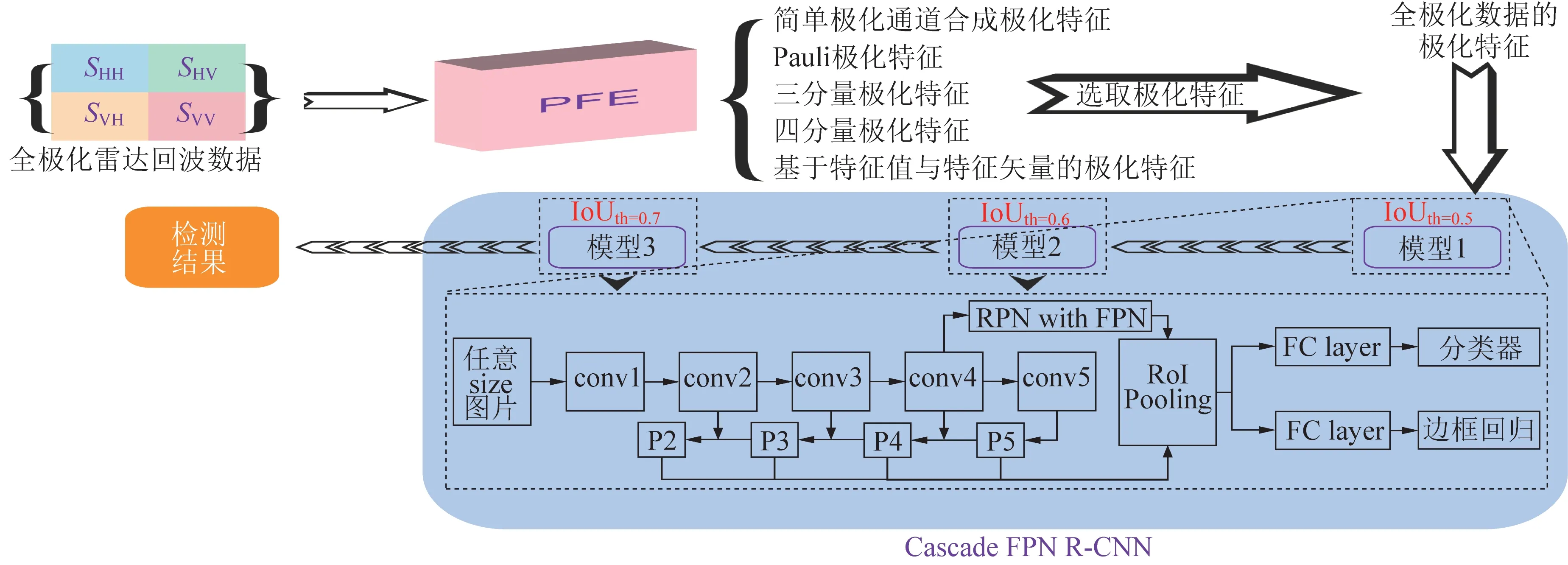
图1 极化深度神经网络结构框图Fig.1 Block diagram of the polarimetric deep neural networks
在使用深度神经网络模型进行目标检测与识别之前,预置极化特征预提取模块,基于电磁波的极化与极化分解分析目标与干扰之间散射机制的差异,并将利用手工初步提取的目标与干扰的差异化特征作为深度神经网络的输入,辅助深度学习模型优化深度特征。
算法引入特征金字塔网络,用以缓解某些干扰类型区域占比过于微小的问题,对于这些类型,若只采用单一的高层特征进行检测,则存在检测性能下滑的风险,而同时结合高层特征与低层特征进行目标检测则会带来更高的计算量,从而提高模型检测性能。
同时,算法引入级联结构,用以缓解两阶段目标检测识别算法中训练阶段与推理阶段区域建议框的分布差异问题。
1.1 极化特征预提取模块
雷达交替发射,同时接收水平与垂直极化的电磁波,用一个二维方阵来表征雷达入射场与散射场之间满足的线性变换过程,并称之为散射矩阵。散射矩阵表征了特定观测频率下的全部极化信息:
式中:矩阵中的元素为电磁波散射相关系数,元素下标第一个字母表示散射场,第二个字母表示入射场。
在满足互易性定理(SHV=SVH)的情形下,根据Pauli 分解,将式(1)进行“Pauli 展开”,可得k向量[20]和极化相干矩阵T:
式中:(·)T为向量的转置;(·)H为向量的共轭转置。
类似地,在满足互易性定理的条件下,将散射矩阵进行“直序展开”:
据此可得极化协方差矩阵C为
如图1 所示的算法结构中极化特征预提取模块以散射矩阵、极化相干矩阵及极化协方差矩阵为基础,基于电磁波的极化与极化分解分析目标的极化信息与散射机制。极化特征预提取模块,一方面可以利用极化信息以丰富目标的特征表达;另一方面通过限制极化分解方法一定程度上降维模型优化解空间,不至于在引入极化特征后使得模型难以收敛。极化特征预提取模块包括5 类极化特征,分别为简单极化通道合成极化特征、Pauli极化特征、三分量极化特征、四分量极化特征、基于特征值与特征矢量的极化特征[20-24],各极化特征的具体描述见表1。
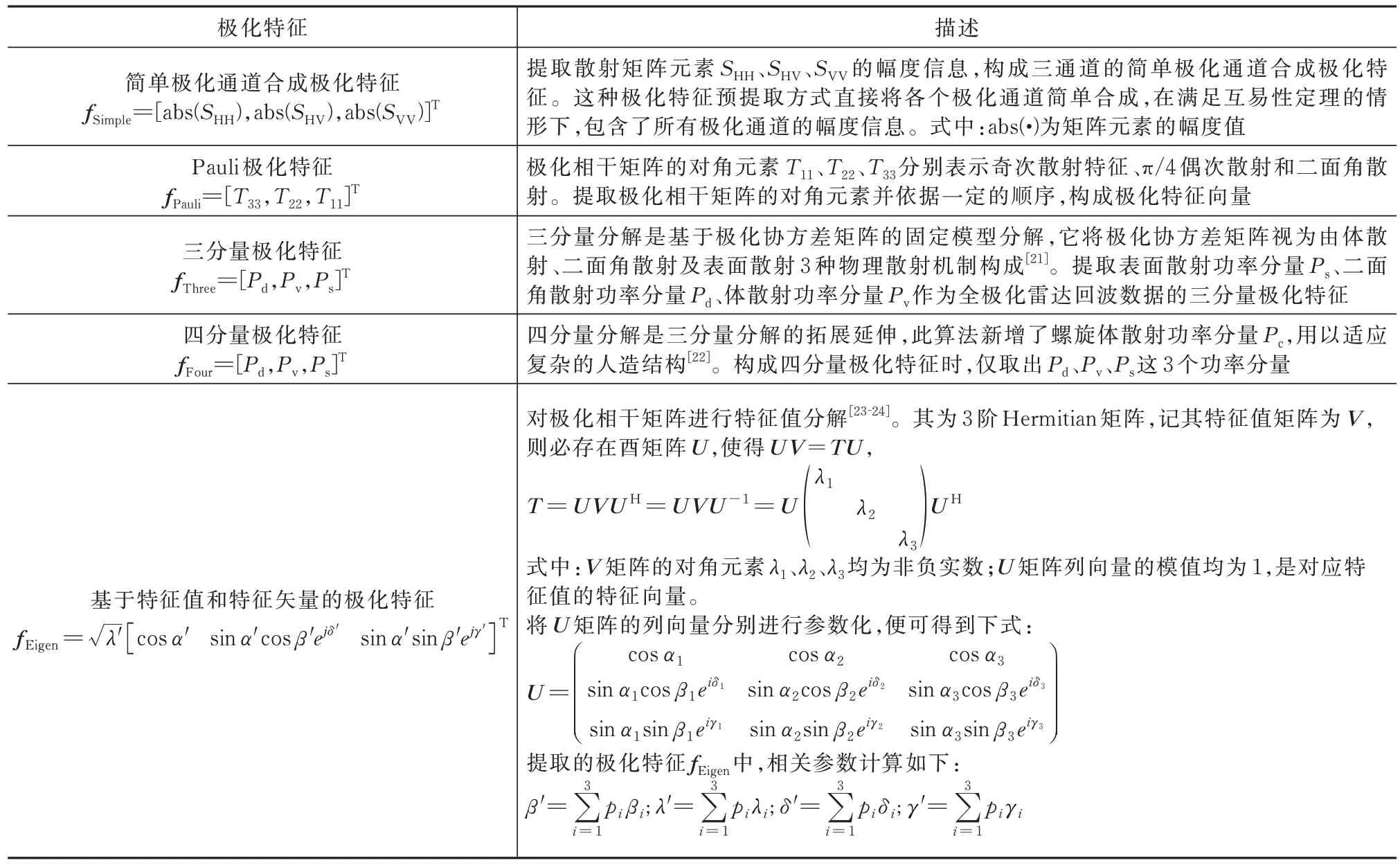
表1 极化特征描述Tab.1 Description of the polarimetric features
在上述极化特征中,以简单极化通道合成极化特征为基准,着重关注Pauli 极化特征、三分量极化特征、四分量极化特征及基于特征值与特征矢量的极化特征这4 类基于极化分解理论的特征。
电磁波的极化对目标的几何结构、介电常数、散射特性等因素较为敏感,因此采取全极化测量方式有助于雷达充分获取目标的各方面信息。极化电磁波具有可分性,极化分解理论的发展验证了极化电磁波所携带的目标信息同样具有可分性[25-26]。对目标进行极化分解,探究目标所包含的物理散射机制,根据不同目标之间散射机制的差异,可辅助进行目标的判别。
具体地说,对于舰船目标,散射机制较为复杂,例如,舰船的甲板表面主要发生表面散射机制,舰船上船员住舱与甲板形成的垂直结构、舰船与海面之间形成的垂直结构等主要发生二面角散射机制,舰船上一些复杂的结构主要发生体散射机制。对于干扰来说,不同干扰类型产生的散射机制不尽相同,某些干扰类型可建模为大量随机运动的偶极子集合体,其散射机制主要为体散射;而某些干扰主要发生二面角散射机制等。采用极化特征预提取模块提取目标与干扰所包含的散射类型,这些手工特征一定程度上体现了它们之间散射机制的异同与比例差异,有助于后续深度神经网络利用这些差异化特征进一步提取具有更强描述能力的深度特征。
1.2 级联检测网络
在两阶段目标检测识别算法中存在一个固有问题——训练阶段与推理阶段的区域建议框的分布差异。在推理阶段,通常设定IoU 阈值来界定参与模型训练的正负样本,这意味着参与训练的样本经过了筛选,而推理阶段产生的区域建议框相对来说质量较差。
在模型训练过程中,当该阈值设置为较低值时,将会导致较高的虚警率与低精度的预测框。若直接提高此阈值,虽然可以有效减少假阳性,但由于参与训练的样本数量骤降,模型过拟合的风险会提高,且阈值的增大将会造成训练阶段与推理阶段的区域建议框之间更严重的分布差异。
实际上,模型难以通过设置一个单一的IoU 阈值(例如IoUth=0.5)使得其对于IoU 跨度较大的区域建议框(例如IoU 阈值区间为[0.5,0.9])都达到最佳的检测识别性能。为了解决上述问题,引入了cascade 级联结构。该结构通过级联若干检测模型来实现检测识别精度的大幅度提升,每个阶段检测模型设定的IoU 阈值逐级递增,且它们更加专注于其设定的阈值附近的区域建议。级联结构如图2 所示。图中,I 为输入数据,conv 为卷积层,pool 为感兴趣区域特征提取网络,H1~H3 为检测头,B0 为区域建议框,B1~B3 为每个阶段的检测识别模型输出的预测框,C1~C3 为每个阶段的分类结果。
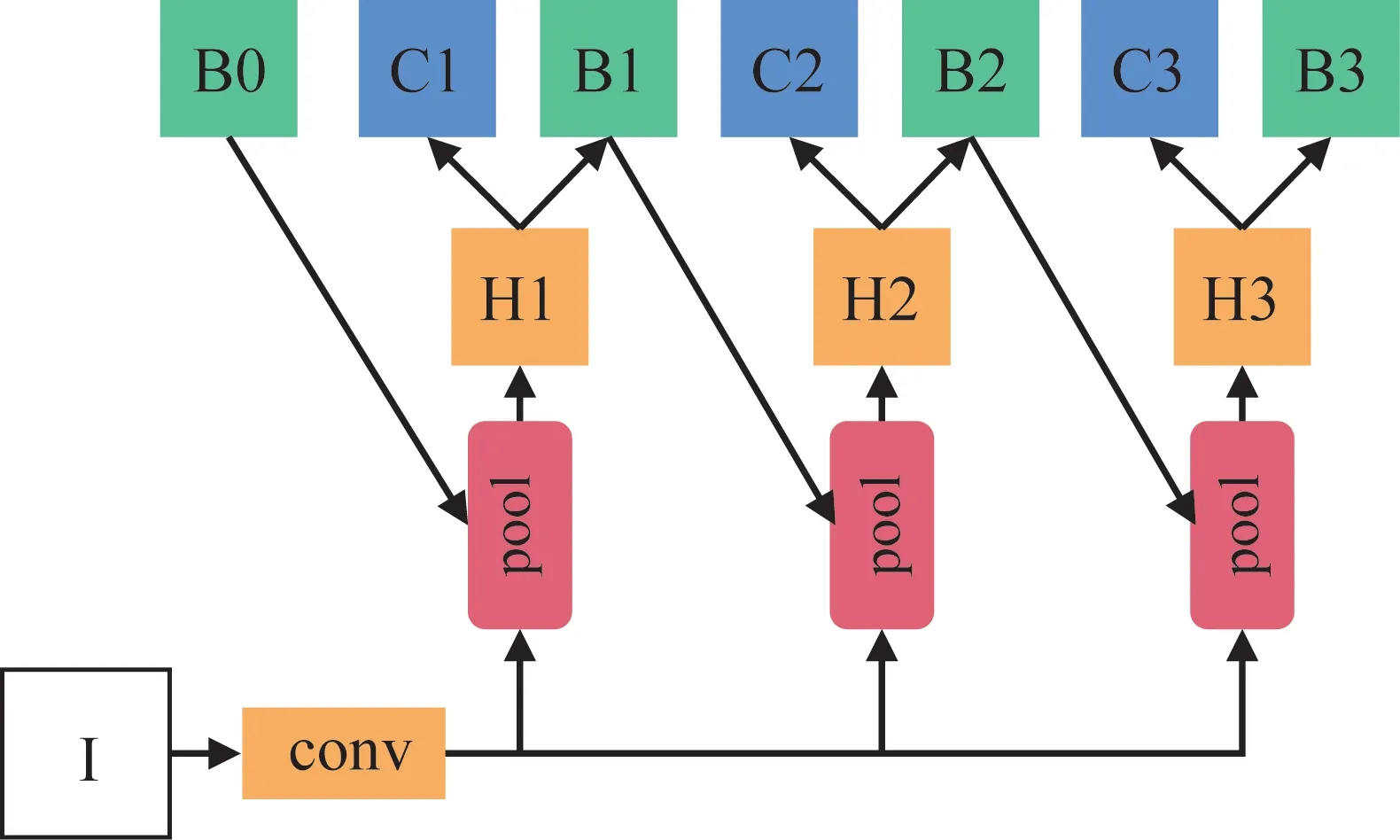
图2 Cascade R-CNN 算法结构框[18]Fig.2 Frame of the cascade R-CNN algorithm[18]
1.3 特征金字塔
深度神经网络模型的低层特征含有的语义信息较少,但是目标的位置较准确;而高层特征的语义信息丰富,目标的位置信息较为模糊。对于小目标来说,随着网络层次不断加深,降采样操作使得小目标所占据的有效区域更加微小,若检测模型只采用单一的高层特征进行预测,将会导致预测框的精度较低。
为了解决上述问题,在Faster R-CNN 的RPN 网络及基础骨干网络中引入特征金字塔网络(Feature-Pyramid Networks,FPN),用以处理雷达目标的多尺度预测问题。FPN 的结构如图3 所示,自底向上为网络模型的前向传播过程;自顶向下的过程则是将高层的特征图经过上采样与低层特征图相加。特征金字塔网络同时利用高层特征与低层特征进行目标检测识别,该方法在基本不增加网络模型计算量的前提下,大幅提高了小目标的检测识别精度。图3 中,1×1 conv 为1×1 的卷积层,2×up 表示2 倍的上采样。
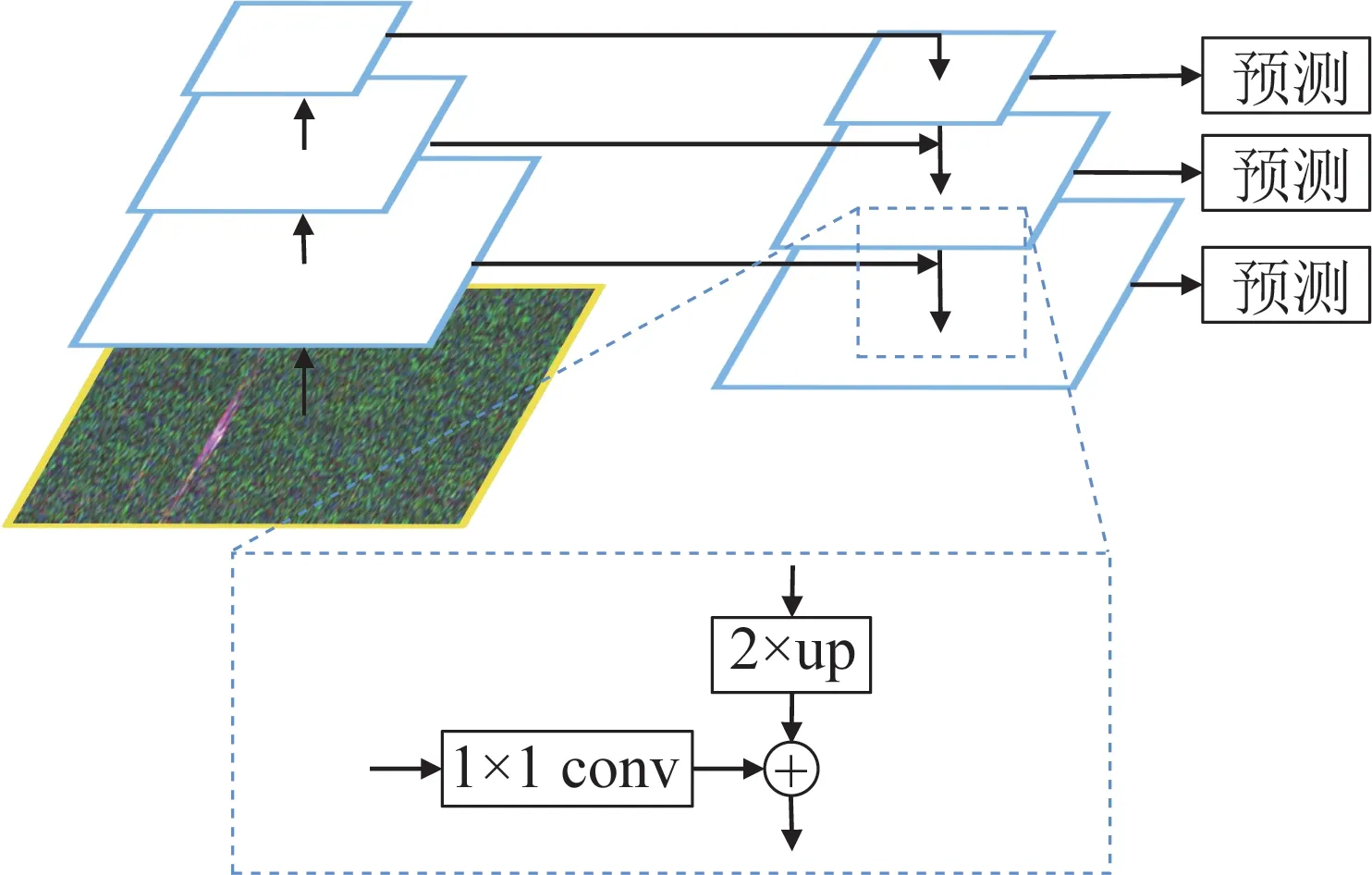
图3 特征金字塔网络[19]Fig.3 Diagram of the FPN[19]
2 实验内容及结果分析
2.1 实验数据与参数设置
实验基于40 284 帧全极化相参雷达对海场景RD 回波数据验证算法性能,每帧回波包括HH、HV、VH、VV 这4 路数据。数据多普勒维点数64 点,距离维点数区间为[512,3 072]。数据集共有标注实例160 154 个,包含2 类舰船目标和3 类干扰目标,各类目标数据分布见表2。
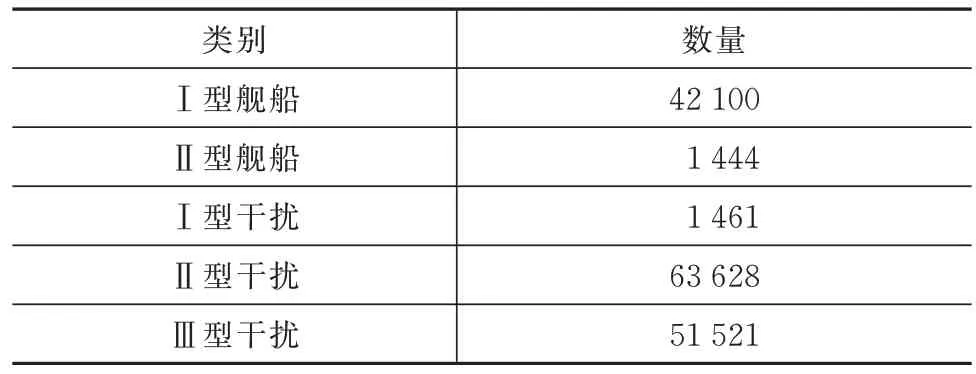
表2 数据集中各类目标与干扰的数量分布Tab.2 Numbers of objects and disturbances in the data set
全极化相参雷达回波数据动态范围大,输入网络前需要进行数据标准化处理。实验中各路极化数据均采用相同的复数数据矩阵标准化计算方法,不失一般性以HH 通道为例进行说明。计算方法如式(6),首先计算HH 路数据的均值HHave与方差HHstd,然后所有数据点减去均值再除以方差得到标准化后的数据。标准化后的数据服从均值为0、方差为1 的分布,能加快网络收敛速度,获得更好的模型性能。
式中:m、n分别为全极化相参雷达回波HH 路数据的距离维与多普勒维的分辨率。
网络优化过程中,采用动量优化(Momentum Optimizer,MO)器,使用学习率预热(Warmup)策略,初始学习率设置为0.005,权重衰减率和动量系数分别设置为0.000 01 与0.9,共迭代320 000 轮。试验采用高性能服务器作为实验平台。服务器配置4 块NVIDIA Tesla V100 GPU,Intel Xeon CPU,256 GB安装内存,软件环境为Python 3.8.13、Pytorch 1.7.1。评估指标为平均精度(Average Precision,AP)与mAP(mean Average Precision)值[6]。
2.2 实验结果分析
针对FPN 网络做了消融实验,在采用相同基础分类网络(ResNet-101)的情形下,更加说明引入FPN 的重要性。实验结果见表3,若只采用高层特征进行目标检测识别,对于Ⅱ型干扰来说检测识别性能较差,原因在于Ⅱ型干扰区域占比远小于舰船目标及其他干扰类型,而当引入特征金字塔网络时,模型的整体检测识别性能有了极大的提升。
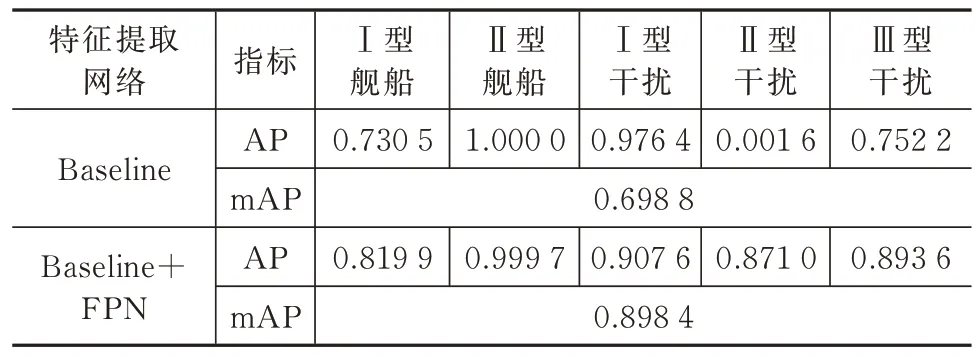
表3 融合特征金字塔网络的消融实验结果Tab.3 Ablation test results of the fused feature pyramid networks
在上述实验的基础上,进一步对引入极化特征预提取模块、FPN 及级联结构的极化神经网络模型进行分析。实验分为对极化神经网络处理雷达RD回波极化特征建模有效性验证,和极化分解极化特征的有效性、优越性及表征性能差异对比2 部分。在极化神经检测网络上对1.1 节提出的所有极化预提取特征进行测试,试验结果见表4。
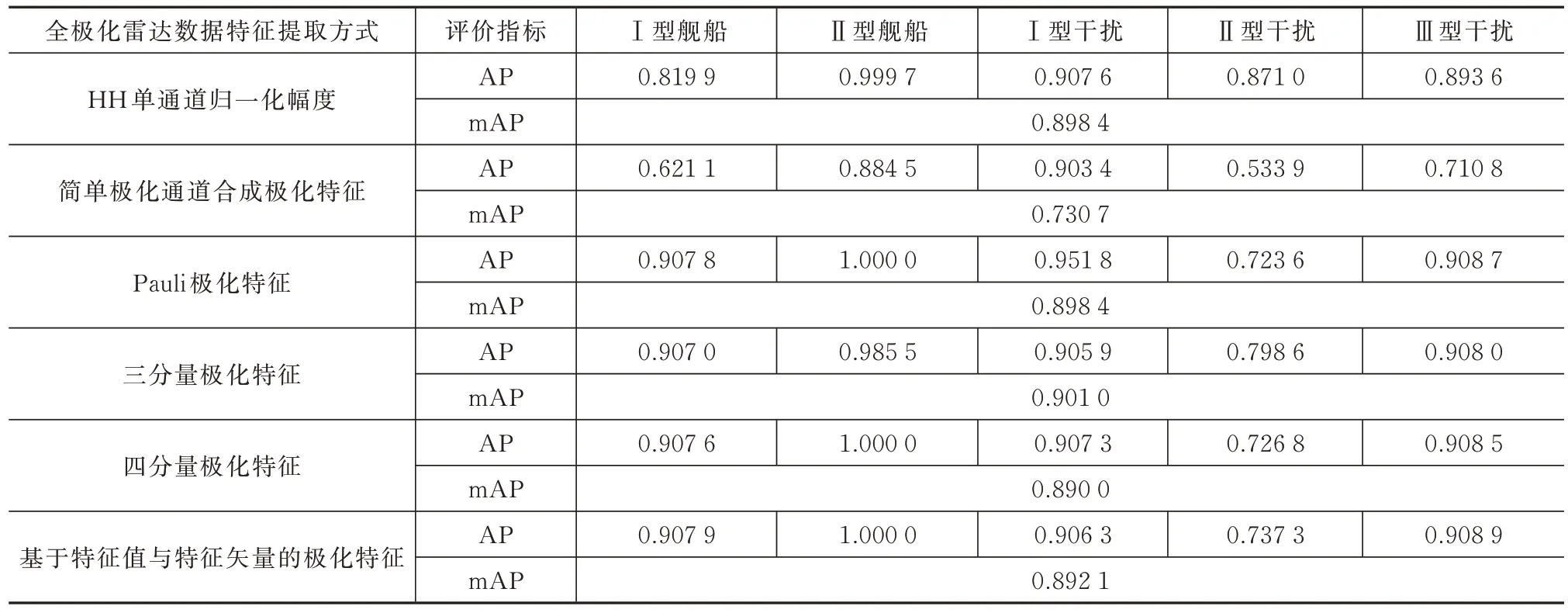
表4 不同特征提取方式下的算法性能Tab.4 Performances of the algorithm under different feature extraction methods
1)首先验证极化特征建模的有效性:第一,特征预提取方式为HH 单极化通道归一化幅度表征,此种特征预提取方式不含极化信息;第二,特征预提取方式为基于HH、HV、VV 的简单极化通道合成极化特征,该提取算法仅简单堆叠各路数据的幅度信息。
在HH 单极化通道的基础上,合并HV 极化通道与VV 极化通道,尽可能充分地利用极化信息,但检测识别性能却明显下降。原因在于,全极化雷达回波数据中,并非所有的极化信息都有利于舰船目标的检测与识别,目标、干扰与背景的某些极化特征由于其相似性会导致神经网络发生混淆。因此,不能简单堆叠极化信息,而需要优选特征,充分挖掘目标与干扰的差异化特征。
基于HH、HV、VV 的简单极化通道合成极化特征对于舰船检测识别任务来说比较有效,但其相比起单极化情形来说并不具备优越性。因此,为了充分解析目标与干扰的差异化特征,引入了基于极化分解的4 种极化特征。
2)在采用极化特征建模的情形下来验证极化分解的有效性。对比实验包括:第一,特征预提取方式为基于HH、HV、VV 的简单极化通道合成极化特征;第二,基于极化分解的极化特征提取。以上极化特征预提取方式所利用的极化信息的信息量相当。
由表4 可知,极化分解优化了极化特征,使得包含目标与干扰在内的各个类别的测试性能相比起简单极化通道合成极化特征均有了显著的提升。值得关注的是,极化分解有利于Ⅰ型舰船深度特征的提取与检测性能的提高。综合对比表中第1~6行的结果,可以发现仅仅利用HH 单通道幅度归一化值进行检测识别已经能取得良好的检测结果,而极化分解的最大优势便在于对Ⅰ型舰船检测性能的提升。表中第1 行,Ⅰ型舰船的平均精度为0.819 9,而第3~6 行的4 种极化特征对于Ⅰ型舰船的平均精度分别达到0.907 8、0.907 0、0.907 6、0.907 9,检测识别性能大幅度提升。
在全极化相参雷达回波数据集上,三分量极化特征达到了最优的综合检测识别精度,其mAP 值为0.901 0;基于特征值与特征矢量的极化特征对于该数据集中2 类舰船目标的平均精度最高,分别为0.907 9与1.000 0。在实际的应用场景中,应依据具体任务的要求对多种极化特征进行实验并择优选取。
3 结束语
本文针对全极化雷达回波数据海面场景目标检测识别方法进行学习研究,提出的极化神经网络引入了全极化数据极化特征预提取PFE 模块提取全极化相参雷达RD 回波数据的极化特征,用以挖掘目标与干扰、目标与海杂波之间的差异化特征,使用了特征金字塔网络FPN 缓解雷达目标有效区域占比微小问题的影响,同时引入了级联模型进一步提高检测识别精度。通过在全极化相参雷达回波数据集上的实验表明:
1)基于极化分解理论提取的全极化相参雷达回波数据的极化特征有利于增大目标与干扰、目标与海杂波之间的差异,从而提高目标的检测识别精度,例如Pauli 极化特征对于Ⅰ型舰船的平均精度达到0.907 8;对于Ⅱ型舰船的平均精度高达1.000 0;对于所有目标与干扰类别的mAP 达到0.898 4。
2)对于实验所采用的全极化相参雷达回波数据集来说,综合表现最佳的极化特征为基于三分量分解的三分量极化特征,mAP 值达到0.901 0;对于两类舰船目标表现最佳的是基于特征值与特征矢量的极化特征,其对于Ⅰ型舰船与Ⅱ型舰船的平均精度分别为0.907 9 与1.000 0。因此,在实际应用中,应根据应用场景与性能要求择优选取极化特征。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
现代财经-天津财经大学学报(2022年5期)2022-06-01
舰船科学技术(2021年12期)2021-03-29
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
电子测试(2017年15期)2017-12-18
舰船科学技术(2016年1期)2016-02-27
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07
电源技术(2015年1期)2015-08-22
