
公路桥梁智能检测技术与装备研究进展
2023-03-15 02:57张劲泉汪云峰刘智超
公路交通科技 2023年1期
张劲泉,晋 杰,2,3,汪云峰,2,3,周 炜,2,刘智超,2,3
(1.交通运输部公路科学研究院,北京 100088;2.运输车辆运行安全技术交通行业重点实验室,北京 100088;3.自动化作业技术交通运输行业研发中心,北京 100088)
0 引言
随着国民经济发展的需要以及国家经济实力的支持,一座座桥梁拔地而起,跨越江河湖海,联通深沟峡谷,优化交通基础设施空间布局,推动现代化经济体系发展和交通强国建设[1]。根据《2021年交通运输行业发展统计公报》数据统计,截至2021年末全国公路桥梁96.11万座、7 380.21万延米,比2020年末分别增加4.84万座、751.66万延米[2]。而且,不仅我国桥梁基数巨大,在《国家公路网规划(2022)》[3]和《“十四五”规划和2035年远景目标纲要》[4]的推动下,公路桥梁也持续开展建设,中国公路桥梁总数稳居世界第一。然而,当前公路交通也随着机动车保有量快速增长,面临着超载、重载、大交通流现象普遍存在的问题;同时,公路基础设施长期承载能力有限,服役20~30 a的桥梁受限于设计、施工、养护水平将进入病害集中爆发期,服役超30 a的桥梁也接近桥梁总数的30%[5];此外,我国仍是灾害多发国家,地震、泥石流、强风等自然灾害对于桥梁的影响也是灾难性的[6]。因此,为了进一步保证交通运输安全稳定可靠,我国公路交通基础设施发展从快速建设逐渐向养护管理趋势转变[7]:加强检测养护水平专业化、信息化发展,完善数据采集、检测诊断、维修处治技术体系,进而有效强化设施耐用性和可靠性[8]。
与此同时,作为国家主要基础设施的桥梁,因损坏造成的社会影响和经济成本损失巨大[9]。2015年7月,美国加利福尼亚州I-10高速公路大桥由于大雨导致的洪水冲击发生了严重的桥梁坍塌事故[10]。I-10高速是洛杉矶市通往菲尼克斯市的重要通道,桥梁坍塌事故导致单幅桥梁直接无法使用、数千名司机被困高速。后续桥梁重建过程期间,双向车流被迫使用另一幅桥梁通行,或绕行将近200 km,严重影响跨州通行效率。2018年8月,意大利西北城市热那亚的莫兰迪大桥发生灾难性坍塌[11],桥上的数十辆轿车和卡车一并坠落砸向桥下的铁轨,造成43人死亡、多人受伤。据调查,桥梁养护不善导致莫兰迪大桥长期受海风硫化物和氯化物的腐蚀,承力主梁钢筋腐蚀度达到68%,外侧钢筋构件腐蚀度达到85%;坍塌时桥梁整体受力钢筋性能已降低50%。2021年1月5日,江苏南通九圩港大桥梁遭受桥梁撞击,导致桥梁坍塌[12]。桥梁坍塌不仅导致车辆、行人绕行通过,同时水运船只也不得不重新规划航线。如图1所示,桥梁破坏和坍塌的影响远远超过与桥梁施工相关的总体材料和财务成本,不仅对这些基础设施造成可用性的限制,而且可能会导致对周围道路网络的强烈交通干扰,从而对道路使用者产生负面影响[13]。此外,桥梁坍塌还包括各种间接成本,包括但不限于生命损失、用户延误、替代路线规划以及与绕道和交通延误相关的间接经济损失。
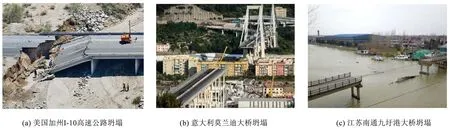
图1 各国桥梁倒塌案例Fig.1 Bridge collapse cases in different countries
虽然自然灾害无法避免,但是随着公路桥梁检测规范日益完善、无损检测技术(Nondestructive Testing,NDT)快速发展以及智能检测装备的进一步投入应用,及时评估、检测和养护桥梁可有效减少修复桥梁的直接成本以及桥梁破坏后可能造成的财产和生命损失的间接成本[14-15]。在役桥梁服役安全保障仍存在较高需求,桥梁检测与养护系统及技术有待进一步优化。因此,本研究将以文献综述的形式从公路桥梁智能检测技术、公路桥梁智能检测装备分析公路桥梁智能检测现状与现有问题,并以此提出进一步优化公路桥梁检测过程的思路。
1 公路桥梁检测规范要求
我国现行桥梁养护体系包括桥梁检测评定与管养护理等。根据公路桥涵养护规范(JTG 5120—2021)[16],桥梁检查应分为初始检查、日常巡查、经常检查、定期检查和特殊检查。单孔跨径大于150 m的特大桥、特别重要桥梁的定期检查周期不得超过1 a,其余桥梁定期检查周期不得超过3 a。包括对材料缺陷、性能缺陷和维护需求的各项要素至少完成近距离目视评估。
梁桥、拱桥、索桥虽然结构上各有不同,但是根据公路桥梁技术状况评定标准(JTG/T H21—2011)[17]定期检测内容上都可以分为桥面系、上部结构、下部结构、桩基、其他构件,同时定义了5类桥梁技术等级:1类(完好)、2类(较好)、3类(较差)、4类(差)和5类(危险)。检查员必须定期定量估计每个病害对于桥梁的影响程度(取决于病害的性状、位置、分布等),并且根据病害的发展情况通过驱动预测模型评估桥梁当前及未来性能[18]。公路桥梁常见的病害类型主要包括裂缝[19]、分层[20]、内部间断[21]、蜂窝[22]、表面间断[21]、外观异常[23]、剥落[23]、疲劳磨损[24]、钢板锈蚀[21]、钢筋锈蚀[25]、支座开裂[25]、钢筋断裂[23]等。
桥梁的检测方式可根据是否损伤桥梁分为有损检测和无损检测。由于公路交通存在连续性的特点,无需大规模封闭道路的桥梁无损检测在技术发展过程中更受管养业主的青睐。无损检测主要是指在对被检测物体不造成损伤的条件下使用多种物理手段,针对桥梁构件或材料的微观、宏观缺陷进行规范化、系统性、科学化的测量与检测,评定检测物体化学成分、力学性能及组织结构,对构件、材料的适应性得出综合性的评价[26]。通过无损检测对构件、材料涂层、几何尺寸、是否有腐蚀、深层硬度、应力状态等方面进行技术测定。其中,桥梁的裂缝检测是桥梁安全检测里的一项常见且重要的内容[27]。桥梁裂缝的出现表明桥梁内部可能己经出现了安全问题。而且,桥梁过多的裂缝也会导致桥梁内部的钢筋水泥遭受外面空气和雨水不断地侵蚀腐化,最终可能导致重大的安全问题[28]。对于桥梁路面的裂缝,通过传统的人工巡查或者路面检测车探测的方法即可检测和定位。但是对于桥梁侧面和底面上的裂缝,仅采用人工目测方法往往很难实现。常见的方法是将检测人员输送到特定区域(如图2所示,通过大型桥梁检测平台车车载的机械臂、特殊桥梁检测平台或特殊吊索实现),再通过人工目测为主的方法进行检测[29]。这些方法虽然容易实现,但是存在较多局限,检测的效率和质量都很难得到保证。

图2 基于人工目测的桥梁检测方法Fig.2 Bridge inspection method based on manual vision
由于目视检查方法的主观性,不同的检查人员可能会报告不同的检测结果。远距离目视检查将限制检查员只能注意到足够明显的表面缺陷;近距离的目视检查则限制检察员处在特殊的环境(包括受交通影响、高空或水下作业、有限的视角、照明条件不足等情境),兼顾自身安全的同时仍需要评估、定位、记录桥梁构件病害,多任务处理也会影响检查员的焦点和判断,进一步影响人工检查的可靠性[30]。此外,公路桥梁通常是公路交通的关键节点,交通流量大且重型、大型运输车辆占比多的特点也影响实际人工检测的作业精度。与此同时,大量的桥梁检测数据仍需要人工整理与汇总,桥梁检测专家也需要大量时间精力从海量的检测数据中定位影响桥梁性能的关键问题[31]。因此,随着智能检测技术的快速发展,桥梁基础设施无损检测越来越重视(半自主或完全自主)机器人设备的应用,进而使得桥梁检测过程更加安全,采集速率更快,检测数据更准[32]。
2 公路桥梁智能检测技术
根据对公路桥梁基础设施智能检测技术的研究,机器人设备可搭载不同的传感器实现桥梁内部、外部构件的智能无损检测。不同的无损检测方法可根据桥梁结构的种类(预应力混凝土结构、钢结构、砖结构等),针对性地设计检测方案[33]。常见的检测方式可按原理分为基于机器视觉的桥梁病害检测方法、基于电磁波的桥梁病害检测方法、基于机械波的桥梁病害检测方法、基于电磁传感器的桥梁病害检测方法、基于放射射线的桥梁病害检测方法。
2.1 基于机器视觉的桥梁病害检测方法
随着人工智能技术的快速发展,机器视觉是当前智能装备主流的公路桥梁表面病害检测方法。其中,桥梁裂缝是结构退化的早期迹象之一,持续暴露的裂缝也将导致桥梁结构进一步恶化[34]。结构表面裂缝类型、数量、长度、宽度的分布情况也揭示了桥梁的病害恶化程度[35],同时较细的裂缝检测精度也是行业检测的难点问题。
在早期阶段,通过应用图像处理方法,对直观明显的图像特征提取相对容易。Tsao等[36]学者首先将病害系统和图像特征相结合,实现了多类明显混凝土病害的分类和检测。该方法基于模糊集理论对图像滤波,通过二值化及聚类方法提取裂缝信息。随着计算机硬件和支持向量机(Support Vector Machine,SVM)方法的发展,Jahanshahi等[37]学者使用人工神经网络(Artificial Neural Network,ANN)和SVM对裂缝进行分类和提取。为了进一步提高SVM的性能,Li等[38]学者采用一种基于线性SVM的新特征选择方法和贪婪搜索策略,检测了由迭代Canny算子提取的轮廓图像的断裂区域,然后消除了非断裂噪声。Asjodi等学者设计了一种基于“弧长法”的桥梁裂缝提取方法分析裂缝模式特征。如图3所示,该方法可以在整个图像中估计裂缝区域,并测量裂缝特征,如裂缝宽度、裂缝长度和裂缝模式角度等[39]。

图3 基于“弧长法”的桥梁裂缝提取方法Fig.3 Bridge crack extraction method based on “arc length method”
近年来,随着计算机技术的飞速发展,深度学习逐渐融入到桥梁病害检测中。目前,基于深度学习的检测方法可以分为3类:基于图像分类(Image Classification)的网络、基于对象检测(Object Detection)的网络和基于语义分割(Semantic Segmentation)的网络。
2.1.1 基于图像分类的网络
图像分类是一种有效的病害检测方法。Cha等[40]学者将卷积神经网络(Convolutional Neutral Network,CNN)应用于病害检测和分类。该方法不仅对光线不均匀等不利因素具有良好的适应性,而且在辨别阴影和裂缝方面也表现良好。此外,Xu等[41]学者提出了一种基于分类网络和滑动窗口的钢箱梁疲劳裂缝识别方法。该方法由3个步骤组成:首先,使用滑动窗口方法剪切原始图像;其次,构建深度神经网络,实现钢箱梁裂缝、笔迹和背景3类分类;最后,利用训练好的神经网络实现了裂缝轮廓的提取。该网络能够对裂缝和笔迹进行分类,但应用在高分辨率图像上的准确性较差。对比传统图像处理方法和深度卷积神经网络方法的特点,Dorafshan等[42]学者提出了一种结合AlexNet分类网络和边缘检测的具体裂缝检测方法。在同一时期,Atha等[43]学者还比较了不同尺寸滑动窗和不同分类网络对钢结构表面腐蚀检测的识别能力。
2.1.2 基于对象检测的网络
目标检测不同于图像分类,不仅区分图像分类,同时可以直接输出目标像素位置。Cha等[44]学者基于F-RCNN(Faster Region-CNN)网络完成了结构螺栓腐蚀、混凝土裂缝、钢构件腐蚀和钢结构明显劣化病害的检测和识别。试验结果表明,在高性能GPU的支持下,多类别检测的平均准确率达到87.8%,对500×375像素的图像只需0.03 s,几乎实现了实时检测。结合迁移学习(Transfer Learning)和CNN网络,Dung等[45]学者实现了钢结构疲劳裂缝区域的检测。在该方法设定的测试集中,检测准确率达到98%,但该方法不能实现桥梁病害的实时检测。
2.1.3 基于语义分割的网络
与分类检测网络相比,分割网络可以直接获取目标物体的轮廓和相对位置。Zhang等[46]学者提出了一种表观裂缝分割网络CrackNet,并通过试验证明了其准确性和有效性。考虑到CrackNet没有池化层,Dung等[47]学者提出了一种基于完全卷积网络(Fully Convolutional Network,FCN)的裂缝提取方法,该方法可以对线性裂缝实现90%以上的检测精度。同时,该网络也可以用于检测混凝土剥离等病害。基于在FCN上构建新的图像特征融合层,Liu等[48]学者提出了一种基于U-Net模型的混凝土裂缝识别技术。如图4所示,混凝土结构表面裂缝可准确分割识别。

图4 基于FCN网络的桥梁裂缝语义分割方法Fig.4 Semantic segmentation of bridge cracks based on FCN network
2.2 基于电磁波的桥梁病害检测方法
基于电磁波的桥梁病害检测方法通过特定设备发射不同种类的电磁波,在特定的介质上发生反射和折射,并通过特殊的接收装置检测特殊的电磁波信号,进而发现桥梁内部的异构情况。此类方法可以按照电磁波的频率分为红外热成像法和探地雷达法。
2.2.1 红外热成像法
红外热成像方法是基于热辐射和温度检测之间的一种检测方法,其中物体的异形结构可以通过表面温度分布的差异映射在图像中[49-51]。该方法通过红外摄像机测量测试元件发出的红外辐射,如果目标材料是均匀的,则热信号在物体中平稳传播,即无内部缺陷;而对于有缺陷的物体,会导致热信号的急剧变化,并定性分析桥梁结构内部病害。
红外热成像技术有两种类型:脉冲热成像(Pulse Thermography)[50]和锁相热成像(Lock-in Thermography)[51]。脉冲热成像使用短持续时间的能量脉冲并记录热响应,容易受到被测物表面发射率和光照的影响,同时对深层微小缺陷检测精度较低。相比之下,锁相热成像使用单频正弦热激励从记录的热图像中找到反射热波的相位和幅度。锁相热成像方法为噪声抑制提供了更好的精度和效率,但测量频率需要更长的时间。
2.2.2 探地雷达法
探地雷达(Ground Penetrating Radar,GPR)检测方法通过分析电磁波在混凝土内部传播和反射情况判断混凝土内部结构[52-53]。如图5所示,移动桥梁外部探地雷达检测仪器,电磁信号通过天线发送到桥梁内部。反射场的强度(振幅)与介电常数大小的变化成正比。当探地雷达沿地面移动时,可获得具有深度信息的二维图像。该方法可用于评估桥面厚度诊断、钢筋和钢筋束管道测绘、腐蚀评估和分层测绘。

图5 基于探地雷达的桥梁面板内部检测方法Fig.5 Interior inspection method of bridge deck based on GPR
探地雷达是一种强有力的无损评估方法,可以有效适用各种环境和条件[53]。然而,GPR在高导电性材料以及非均匀介质条件下出现信号衰减或复杂散射的现象。另一个局限则是雷达检测结果无法直观表示检测情况,需要大量的专业知识才能正确处理与理解。
2.3 基于机械波的桥梁病害检测方法
基于机械波的桥梁病害检测方法通过特定设备发射不同种类的振动,与桥梁结构在不同频率上发生共振,并根据不同的信号接收频率发现桥梁构件内部的病害缺陷。此类检测方法可以按照机械波的频率和发射方式分为冲击回波法、声波发射法和超声波检测法。
2.3.1 冲击回波法
冲击回波法(Impact Echo)是通过在结构的表面施以微小的冲击产生瞬时应力波信号,并接收和分析机械波返回信号检测桥梁内部[54-55]。应力波沿球形方向传播至结构中,并被内部裂缝或空隙或界面以及结构的外部边界反射。靠近撞击点的位移传感器用于检测反射波到达时的表面位移。通过分析应力波的波速、波形、频率等参数,经过计算机处理技术得到频谱图,判断混凝土构件的内部质量情况。当前冲击回波源产生的冲击持续时间范围约为10~80 μs。较短冲击时长的波频范围更广,但振幅较低。因此,冲击回波法无法同时兼顾检测精度和混凝土穿透能力。
2.3.2 声波发射法
声发射(Acoustic Emission)是利用应力波在混凝土或钢板中传播,根据其反射波的参数变化情况判断构件的厚度及损伤情况[56-57]。该方法以弹性波的形式产生能量,这些波以圆形模式从裂缝尖端附近向外辐射,通过附在构件表面的传感器获取。为了定位裂缝并消除噪声源的干扰信号,将传感器以几何阵列放置在待测构件上。声发射方法在轧制型材、板材、焊接连接件和缆索配件等钢构件检测中效果明显。然而,该方法只能用于检测桥梁浅层的缺陷。同时,声发射检测方法需要较为复杂和经验性的设备布设方法。
2.3.3 超声波检测法
超声波检测(Ultrasonic Testing)在各类桥型损伤检测中的应用均非常广泛[58-60]。如图6所示,该方法可用于检测地下体积缺陷,包括夹渣和簇状孔隙度、表面断裂缺陷和材料厚度,以测量腐蚀和施工误差。同时,该方法还可用于斜拉索和钢筋束锚固区的断线检测。超声波检测方法使用的工具包括脉冲发生器、接收器、电子信号控制器和耦合装置。在这种方法中,使用频率超过可听范围的超声波对结构部件进行测试。超声波检测器上的反射波包括地下内部缺陷情况以及表面的精确距离。

图6 基于超声波的裂缝检测方法Fig.6 Crack inspection method based on ultrasonic wave
电子脉冲的特定振幅和频率通过连接到压电晶体探针的引线产生。根据产生波的类型,存在两种类型的换能器:直波束换能器和角波束换能器。直波束换能器产生由交替的原子层组成的压缩波,这些原子层由于弹性运动而膨胀和压缩。角波束换能器产生剪切波,该剪切波与波运动方向成直角振荡。超声波换能器的接触与被测件表面之间存在气隙可能会导致波散射。因此,需应用凝胶耦合剂于表面加强原位粘合以防止波散射。超声波检测法检测快速、成本适中,且该方法的准确性、便携性和安全性都处在较高的水平。然而,该方法对于检查非常薄的构件、易碎材料和具有复杂几何形状的构件效果较差。同时超声波检测法效率较低,探测深度与成像分辨率成反比关系,且内部深层无损检测效果一般。
2.4 基于电磁传感器的桥梁病害检测方法
由于钢筋、缆索、钢板等钢结构具有导电、导磁的特性,同时此类钢构件通常是桥梁主要承载应力的单元,因此,通过检测钢构件内电场、磁场的变化也是有效检测桥梁现役状态的手段。常见的基于电磁传感器桥梁病害检测方法可分为涡流检测法和漏磁检测法。
2.4.1 涡流检测法
涡流(Eddy Current)检测方法是一种使用通电探针的无损电磁测试[61-62]。该技术使用并排放置在探头上的涡流线圈检测构件内涡流。如图7所示,当探头放置在待测构件上时,探头周围会产生动态磁场。该磁场在以探头为中心的待测构件中产生涡流。待测构件上感应的电流以圆形模式振荡,并沿着与线圈中电流相反的方向流动。由于涡流会产生特定的幅值和相位,因此任何裂缝或不连续病害都会影响幅值和相位。然而,该方法只用于能产生涡流的浅层导电材料。而且,检测出涡流的因素较多,仍需要后续评估专家深入分析。
2.4.2 漏磁检测法
漏磁检测(Magnetic Flux Leakage Testing,MFL)主要用于检测悬索桥和斜拉索桥中缆索的缺陷。为了检测包括腐蚀、断裂、横截面损失和钢构件内部的缺陷,通过使用强外部磁体对元件进行磁化[63]。磁场存在于磁体的探针之间,因此钢元件中的缺陷导致材料中的磁场从其磁通路泄漏,磁泄漏通过放置在磁极之间的磁传感器检测。应用MFL方法检测每根缆索的时间约为10~20 min,但是由于缆索表面准备和后勤保障时间,平均每根缆索的实际检测时间约是半个工作日。同时,这种方法仍有一些其他的局限性,一个是强电磁场的安全性问题,另一个是地面电缆准备的成本问题。
2.5 基于放射射线的桥梁病害检测方法
预应力混凝土结构及钢结构桥梁深层病害检测一直都是无损检测研究的难点。随着粒子放射设备逐渐便携化和轻量化,基于放射射线的桥梁病害检测方法可用于桥梁深层结构检测,主要可分为射线检测法和中子探针法。
2.5.1 射线检测法
射线检测法主要是使用X射线或伽马射线产生待测区域的射线照片,以记录厚度、装配细节和缺陷的任何变化[64-65]。射线检测法在结构工程中有着重要的应用,通常用于钢构桥焊接处检测。动态载荷下焊接接头中的裂缝会进一步扩展并减小横截面,直到焊接部件发生断裂处。此外,该方法在检测焊缝内部气孔、裂缝、夹杂物和缺陷的能力和准确性也具有较强的效果。
射线检测设备由辐射源、胶片暗盒或数字平板探测器、透度计和胶片制作器组成。射线检测的应用几乎不需要表面处理。射线检测最有效的应用是检测肉眼看不到的表面缺陷。在这种方法中,待测构件受到辐射源的照射。根据材料密度,辐射以不同的速率传输,并在照相胶片或荧光屏上捕捉变化。射线检测的X射线灵敏度为2%,即20 mm部件的最小可检测空隙为0.4 mm。射线检测法也可在实验室环境内检测斜拉索中的断线。射线检测方法的主要缺点包括操作速度慢、成本高、辐射风险高以及复杂的检查员特殊培训。
2.5.2 中子探针法
检测氯化物的中子探针也称为即时伽马中子活化(Prompt Gamma Neutron Activation,PGNA),这种无损检测方法确定混凝土中轻元素(Ca,Si,Fe,Cl,S,Al)的组成[66]。混凝土中这些元素的含量提供了对混凝土一般结构状况的评估。用便携式铀中子源对混凝土的给定部分进行中子辐照。如图8所示,辐照过程会使每个元素都会产生一个特征伽马射线,由高纯锗探测器检测和计数。

图8 基于中子探针法的桥梁检测方法Fig.8 Bridge inspection method based on neutron probe method
然而在实际应用中,为了保障高纯锗探测器免受中子的辐射损伤,较厚的LiF保护层导致整个设备的质量都较重,不太方便移动。同时,操作设备的专业程度和安全保护程度也有较高的需求。
3 公路桥梁智能检测装备
公路桥梁智能检测装备依托智能检测技术及自动化机器人技术发展,针对检测过程中特定的操作模式、电源、数据采集类型和精度需求,设置特殊的结构、尺寸和功能设计。根据需要检查的区域或构件,主要可以分为以下6种类型的公路桥梁智能检测装备:桥面自动检测平台、梁底检测平台、缆索检测机器人、巡检无人机、吸附式检测机器人以及水下检测机器人。各类型代表性的机器人及常规检测区域如图9所示。同时,各检测装备间也存在互补关系:(1)首先路面检测需求与交通荷载直接相关,可主要基于路面自动检测平台实现检测;(2)通过桥底检测平台可实现与路面检测相对应的桥底检测过程,结合桥面检测平台共同完成桥梁面板上下表面的检测过程;(3)对于特大跨径桥梁,缆索结构是连接桥梁面板的主要受力构件,各类缆索检测机器人可有效实现检测;(4)针对较高区域的缆索、桥塔等区域,仍需要巡检无人机覆盖更大范围的桥梁检测;(5)吸附式检测机器人也可进一步解决无人机无法抵近观察的痛点,同时也可以实现箱梁内部的检测;(6)针对水下基础等特殊检测需求,仍需要各类水下检测机器人辅助检测。

图9 各类型公路桥梁智能检测装备Fig.9 Various types of intelligent inspection equipment for highway bridges
3.1 桥面自动检测平台
公路桥梁路面在服役期间直接受交通荷载冲击与影响,同时在强风、地震等外界条件下极易发生局部变化。公路桥梁通常铺设沥青路面,其常见的路面检测与监测可视化方法技术主要包括高清相机、线扫描照相机、红外照相机、雷达探伤仪、光度立体技术等[67]。因此,通过大量的检测数据实现全面、准确、可靠的桥梁路面数据可视化采集,及时发现桥梁路面病害状况和病害,分析桥梁结构早期损坏趋势,实现智能化养护决策,可有效降低养护成本,避免桥体、路面大幅度翻修,减少对公路交通的影响,具有十分重要的经济效益和社会效益[68]。
2011年,美国俄克拉荷马州立大学Lim等[69-70]学者为了解决桥梁面板裂缝检测的问题,设计了一种基于Pioneer 3-DX轮式机器人的裂缝测绘系统ROCIM(Robotic Crack Inspection and Mapping)。该系统首先通过LMS-200激光测距仪实现二维地图上的定位;然后基于(分辨率1 024×768)的日立KP-F83GV CCD相机实现道路环境的原始数据采集;最后,原始数据可通过高斯拉普拉斯算法检测桥面裂缝并在全局坐标系拼接相关裂缝图像。通过实际桥梁验证,该系统的有效检测裂缝可达到1 mm精度。然而,该系统需要提前封闭道路并引导交通流,且实际检测效率和精度与传统人工路面检测仍有一定差距。
2013年,La和Gucunski等[71-79]学者设计了一种路面检测机器人RABIT(Robotics Assisted Bridge Inspection Tool),并在美国40多座大桥实际应用。RABIT机器人以Seekur电动四轮差速机器人作为移动平台,首先通过两个RTK GPS单元、一个前置激光测距仪、两个侧向激光扫描仪以及一个惯性导航单元实现定位与运动规划;然后通过两组声学传感器、探地雷达、高分辨率相机及全景相机收集桥板无损检测数据,并通过无线通信传输到货车上的指挥中心进行在线数据处理;其中,高分率相机使用宽幅镜头并配备单独的闪光灯,每隔61 mm收集一次图像,检测面积约为183 mm×60 mm,30%的重叠区域可用于后续图像拼接。该系统能够分析桥面常见的病害,并且可以通过后续组合数据进一步分析桥梁路面状态。该机器人具有较强的独立自主导航能力同时配备了较为先进的桥面传感器,是近10年桥面检测机器人的设计参考模型。然而,该机器人在高速模式下(仅应用探地雷达和相机传感器)的最大移动速度2 m/s,仍需要对道路进行交通管制和部分封闭引导;而且,在全功能模式下不仅速度最快仅为0.5 m/s而且每隔60 cm需要驻车应用声学阵列传感器接触桥面收集数据;同时,该机器人整体质量较重,工作范围仅支持桥面检测,仍需要其他检测设备和手段匹配其他桥梁部位的检测。
2014年7月,内华达大学雷诺分校(University of Nevada,Reno,UNR)副教授La建立了高级机器人与自动化(Advanced Robotics and Automation,ARA)实验室,并基于RABIT类似的传感器布设方法,与Gibb等[80-83]学者设计了另一套基于轮式机器人的桥面检测平台。相比于RABIT机器人,该机器人将探地雷达布置在平台后方,以增大平台前方PrimeSense深度相机可视角度和范围,提高多传感器协同检测效率;配置车载运算和处理设备,可针对快速检测过程中潜在病害位置进一步深入检测;优化了相机数据和雷达数据的分析和融合效果,并构建概率和相关性模型,聚焦梁内钢筋劣化迹象,结合历史数据和多种无损检测数据结果分析和预测潜在裂缝位置。该项目同时研究了人机协同、多机器人协同检测方案的总体有效性,整体方案可通过提升检测效率,较为明显地减少道路封闭和交通引导的成本,进一步优化桥梁路面检测过程。
厦门公路事业发展中心与上海圭目机器人有限公司侯海涛等[84]学者研究了一种基于机器人的道路病害自动化检测系统。如图10所示,该机器人基于四轮独立电机独立悬挂的中尺寸底盘平台,搭载基于面阵相机的道路表观采集系统、基于三维探地雷达的道路结构层信息采集系统,并基于2D-3D视觉融合数据及特征分析道路表面及隐性病害。该机器人基于U-Net模型实现路面全覆盖、结构全断面检测,并完成内部病害厘米级定位;机器人运行速度最快可达20 km/h,也可实现低速车流状态下的路面检测;可跨越高度达100 mm,对于道路形变、错台等特殊应用场景也有一定适应性。

图10 圭目轮式机器人Fig.10 Guimu wheeled robot
综上所述,桥面自动检测平台可以实现桥梁面板相关病害的检测,具有安全性高、稳定度高、检测设备及流程相对完整的特点。同时,相比于常规道路路面快速检测系统,桥面自动检测平台针对桥梁结构检测需求搭载了多种桥梁无损检测传感器,可以对于桥梁内部结构及病害完成检测工作。然而,桥面自动检测平台仍有以下难以避免的问题,需要其他多种设备共同实现桥梁的检测。
(1)检测范围在整体桥梁检测任务中占比较低:设备质量较大,检测范围只能覆盖桥梁面板及内部浅层区域相关病害。
(2)封闭道路和交通引导成本高:设备移动速度和检测方式受限,导致桥梁检测必须对于引导交通流实现让行或绕行等方式。
3.2 桥底检测平台
由于现有桥梁的承载属性和常规受力方式,因荷载导致的次应力裂缝及病害会优先出现在桥梁底部,进而向两侧甚至桥面发展[85]。因此,桥梁底部的病害检测是有效检测桥梁载荷影响的关键区域。然而,桥梁底部的检测人员通常处在高空作业环境,检测精度、稳定度等均难以有效保证。随着基础设施无损检测技术的发展,部分学者设计了多款桥底检测平台,此类平台通常通过大型工作臂将高清摄像机送到桥梁底部,基于机器视觉实现桥底病害检测。
2009年,韩国汉阳大学Oh等[86]学者设计了一套桥梁智能检测机器人系统。该机器人基于小型货车底盘改装,配有特殊的机械臂和摄像机(分辨率640×480像素),通过手动远程控制实现桥梁底部的病害检测。然而,在韩国京畿道省Gu-Haengju大桥检测过程中,检测机械臂末端存在明显的摇动与倾斜;与此同时,成像过程需要车辆保持静止,且单幅图像面积仅有9.6 cm×7.2 cm,检测效率明显低于人工检测。此外,该设备臂展较短,仅支持半幅单车道的桥梁底部检测。
2011年,韩国高速公路公司Byeong-Ju Lee等[87]学者提出了一种基于视觉的桥梁检测系统U-BIROS(Ubiquitous Bridge Inspection Robot System)。该机器人基于履带式自行走轮的固定运输底盘开发,以保证设备在移动过程中的稳定性;通过液压臂移动多组视觉检测单元和匹配的补光照明设备,并根据两侧的超声波测距仪和激光测距仪实现定位、定距;最终基于多组型号Canon Powershot G10(1 500万像素)的高清相机在距离桥梁底部3 m的位置记录裂缝的尺寸、形状等信息。U-BIROS机器人可以实现双车道宽度桥梁底部的检测,并且通过一种自动追踪暗点的方法估算裂缝深度。然而,该系统智能化水平较低,需要预先查看桥梁图纸确定桥梁检测范围,并基于无线通信全程通过人工远程操作机器人作业。
2017年,为了进一步优化桥梁检测平台实际检测的效率,由湖南桥康智能科技有限公司、湖南省交通科学研究院、湖南大学等学者设计了一款桥梁检测机器平台BIR-X[88-99]。该平台结构主要可分为桥面行走底盘、液压机械臂、末端机械手及传感器。桥面行走底盘由重型卡车二类底盘为基础改装,可有效保障该机平台在桥面上方的稳定性与安全性。该平台桥检作业过程与传统基于检测车的作业过程类似,无需完全封闭道路,仅需要占据应急车道和一条慢车道。机械臂采用6061-T6铝合金,可以以340 MPa的抗拉强度承重28.9 kg的机器手以及其检测装备。该液压机器臂展开时能达到15 m的检测半径,可覆盖单向三车道桥梁的底部检测,末端振幅可控制到185 mm以内。为了进一步抑制末端抖动,该平台末端配有自稳定平衡的UR10机器人搭载末端检测装备(10 kg以内)。检测装备集成了3个JAI Spark系列SP-2000C-CXP2高精度相机(30 fps,5 120×3 840像素)及85~135 mm镜头、北阳的UTM-30LX激光扫描测距仪及补光设备。BIR-X检测数据可通过ORB(Oriented FAST and Rotated BRIEF)算法快速拼接图像,并基于YOLO-lump和YOLO-crack双网络快速识别病害。然而,该设备在作业过程中不仅需要配备4名工作人员(车辆驾驶员、设备操作员、交通引导员以及安全管理员),且桥梁细小裂缝等病害仍无法依靠设备实时同步检测。
为了减少对于实际交通的影响,2018年法国里昂国立应用科学学院Sutter等[100]学者设计并由Mobilev Cranes公司定制化生产一种用于公路和铁路桥梁的半自动机器人系统。该机器人可在法国铁路桥排水渠通道(宽度70 cm)以5 km/h的速度,1.2 L/h的油耗行驶作业至多12 h;机器人作业期间由检测员在车内操作机器人及机械臂,并由桥测垂直臂和桥下水平臂的检测终端(约2 000万像素)不断移动自动记录桥梁病害。然而,在法国Sud-Europe-Atlantique高速列车线实际检测过程,由于该设备不具备病害自动识别功能,为了减少后期桥梁病害判定的二次人工成本,操作员更倾向通过手动模式拍摄桥梁病害,每天仅拍摄约100~150张照片。此外,由于机器人平台和机械臂尺寸按照法国铁路桥梁设计,无法直接适用其他国家桥梁检测需求。
2021年,意大利技术研究所D’Imperio等[101-102]学者设计、Cammozzi集团建造生产了一种基于远程视觉检测技术的桥梁检测平台RIUs(Robot Inspection Units)。如图11所示,该机器人可依托82个支撑轮减少每个轮体对桥梁侧底部的压强,并稳定驱动机器人在桥上移动;同时,17 m长的碳纤维机械臂可将高清传感器覆盖整个桥底;最后,通过14个高清摄像头、超声波风速仪、激光雷达以及多光谱视觉系统有效检测桥梁病害。在意大利热那亚San Giorgio大桥的使用过程中,该机器人可以连续工作9 000 s,剩余的电量(约占使用电池的25%)用于支持该机器人返回充电仓。然而,该机器人以特定大桥为设计目标,设备成本较高,难以直接匹配常规桥梁,而且支撑轮受力方式是否对桥梁有额外损伤仍有待考究。

图11 意大利桥梁检测平台Fig.11 Bridge inspection platform of Italy
综上所述,依托桥底检测平台可以较为稳定地将无损检测传感器应用于桥梁面板下表面的病害检测中,可有效解决人工桥底检测风险较高的问题。此外,相比于传统吊篮式或桁架式桥梁检测车,桥体外机械臂无需载人的情况也可有效减少机械臂质量,防止检测平台因侧倾导致的侧翻、坠落。然而,桥底检测平台仍存在以下几类问题。
(1)智能化程度较低:受限于桥梁结构复杂,现有梁底检测平台大多需要人工远程操作实现平台机械臂展开及移动平台的驱动,仅检测终端实现自动化。
(2)检测范围和检测精度有待提升:现有桥梁检测平台于桥下有效覆盖半径通常仅为10~17 m,无法满足单向四车道20 m级的检测范围需求;此外,较长的机械臂会导致末端抖动难以有效抑制,无法满足病害高精度的检测需求。
(3)检测效率低:现有基于桥面行驶的桥梁检测平台一般是在应急车道行驶,检测过程通常需要格外占据一条车道,同时路侧灯杆、防抛网、隔音壁等干扰较多,检测效率相比传统检测方式无明显提高。
(4)装备适用性较差:部分桥底检测平台针对各国桥梁检测情况或特殊桥梁设计,无法直接满足其余桥梁实际检测需求。
3.3 缆索检测机器人
缆索结构是悬索桥、斜拉索桥重要的受力方式,也是支撑桥梁实现大跨径快速通道的关键,直接关系大跨径桥梁的安全与使用寿命。因此,为了确保索结构桥梁的使用安全,定期对于缆索的检测和养护尤为主要。常规目视的检测方式无论在检测范围还是检测效果上都有一定的局限性。因此,随着无损检测技术的发展,便捷、可靠的检测机器人也因此可以辅助技术人员评估缆索系统的材料和结构状况,提升缆索的实际检测效果,完善桥梁整体结构安全与稳定。
南京邮电大学徐丰羽教授[103-113]负责的课题组从2011年开始缆索检测机器人领域的研究,分别针对缆索结构设计了多款轮式缆索检测机器人。缆索机器人通常包括3部分功能:使机器人维持在缆索上夹紧机构、使机器人向上爬行的驱动机构以及其他特殊需求(越障、防风、防抖等)。该课题组分别设计了包括以弹簧、磁吸等方式作为缆索夹紧机构,两边轮或三边轮作为缆索夹紧后的驱动方式,同时对于缆索机器人的越障性能、抗震安全性、清洗维修也有一定研究。该系列机器人已在武汉军山大桥、十堰汉江大桥等斜拉索检测项目应用试验。然而在实际应用过程中,夹紧机构过松可能导致机器人无法在缆索上处在稳定状态,夹紧机构过紧可能导致后续驱动过程磨损缆索表面。同时,对于相对地面角度过大的斜拉索或悬索,基于轮式的缆索机器人还存在驱动轮附着力不足难以爬升的问题。
针对轮式缆索机器人随着负载增加可能损坏缆索及保护层的问题,韩国成均馆大学的Cho等学者充分考虑了机器人与缆索接触面积的实际关系,设计了基于履带式机器人的缆索检查系统MRC2IN[114-116]和MRC2IN-II[117-118],可以有效提升机器人的负载能力和爬升稳定能力,实现悬索结构的爬升和检测。同时,该系列也充分考虑了吊索的绞合股结构,通过优化履带纹路提升机器人的稳定性。此外,考虑了缆索检测项目缆索数量较多的情况,该团队为MRC2IN系列机器人设计了仅需10 min操作的快速拆卸装置。然而,该机器人仍需要电缆连接,为爬升过程提供电力支持,最大检测范围未超过40 m。
为了增加缆索机器人的使用范围,ARA实验室的La和Nguyen等[119-120]学者设计了一种基于磁吸法的坦克式机器人。该机器人利用履带内永磁体产生的吸附力使机器人可以攀爬于各种弯曲、粗糙的刚结构表面,并跨越螺母、螺栓、凹角、凸角等障碍。然而,在测试过程中采用7.4 V 900 mAh的电池仅能支持该机器人不到1 h的续航。而且,对于鸟粪等不整洁接触面,仍存在失去附着力的情况。
华南理工大学魏武教授等[121-125]学者充分考虑缆索结构,设计研制了一种具有高攀爬和机动性的蛇形拉索检测机器人。该系列研究充分考虑了缆索设计结构及缆索圆周方向视觉检测需求,通过正交连接和P-R连接设计了仿照蛇骨骼特点和运动机理的多个水平和竖直关节模块;然后通过仿真数据优化螺旋半径、螺旋上升角、螺距等控制参数,实现蛇形机器人的螺旋式攀爬运动模型;最终通过头部设置的多传感器实现缆索表观缺陷检测。然而该机器人有较高的多关节协同要求和高控制算法复杂度,电池过热容易导致个别关节卡死,进而影响整个机器人的攀爬移动。
缆索检测机器人大容量的有效荷载一方面可以增加电池负载,提升缆索检测机器人的有效续航时间,另一方面可以搭载30 kg重的MFL传感器。为了充分提升缆索检测机器人的有效荷载,香港中文大学郑振粮等[126-127]学者研制了蠕动式机器人(Cooperative Climbing Robot,CCRobot)系列,目前已更新至第五代。CCRobot蠕动式机器人考虑了蠕虫爬行的过程,分别设计了锁定模块和攀爬模块两个模块。在攀爬过程中,机器人上方的4个夹持器夹紧拉索表面,实现机器人上部结构在不同维度上的锁止。在第二代CCRobot-II机器人[128]上,通过引导轮和滑动框架提升该机器人的攀爬速度。第三代CCRobot-III机器人通过将两个模块分离,以钢丝束方式连接,优化机器人结构,进一步提升爬升过程载荷(除自身外40 kg的载荷)[129]。由于分体式前驱模块与缆索障碍物发生接触会降低爬升系统的稳定性,第四代CCRobot-IV基于旋翼式前驱模块提升了对障碍物(如螺旋肋、小型金属配件等)的通过能力,并于李家沱长江大桥得到验证[130]。在第五代机器人CCRobot-V设计中,通过协作式串行多机器人系统进一步提升桥梁缆索检查和维护的有效性[131]。如图12所示,该系统由攀爬前驱机器人、主检查/维护机器人、多个缆挂机器人和电力传输系统组成,每个缆挂机器人具有50 kg的有效载荷。此类蠕动式机器人相比于轮式机器人有更高的有效载荷,然而复杂的动作导致行动速度较为缓慢。

图12 缆索检测机器人CCRobot-VFig.12 Cable inspection robot CCRobot-V
此外,2022年CCRobot研究团队针对悬索桥主缆检测设计了“攀登者I号”(Cooperative Climbing Robot-Main Cable Version I,CCRobot-M-I)[132-133],如图13所示。该机器人以悬索桥人工检修通道上的扶手绳为攀爬载体,通过CCRobot系列的仿生蠕动方式前进,基于环抱式多摄像头实现主缆全角度的图像采集和病害检测,为桥梁缆索结构全自动化、智能化检测提供新方案。

图13 主缆检测机器人Fig.13 Main cable inspection robot
综上所述,缆索检测机器人可有效完成大跨径桥梁缆索结构的专项检测。此类机器人通过各种仿生手段实现特殊缆索结构的固定、攀爬、越障,近距离、高稳定的实现缆索结构无损检测,可解决常规人工缆索检测过程中技术人员安全保障要求高,有效检测范围较低、实际可量化数据不足等问题。然而,在实际应用过程中,仍存在以下多项技术难点。
(1)缆索夹紧结构过松或过紧:由于缆索是圆柱形外表面,通常夹紧机构都会有一定程度的接触不足,进而导致机器人轮式、履带式等基于接触摩擦的驱动方式无法有效传递机械扭矩;或者,过度调整接触压力导致对于缆索及表面保护层二次损坏。
(2)机器人有效载荷少:除了MRC2IN-II和CCRobot系列机器人有效载荷超过30 kg外,其他机器人无法搭载MFL传感器,同时较少的有效载荷也导致无法携带足够的能源支持设备大范围的攀爬和检测。
(3)检测范围近:缆索机器人通常受制于电缆的供电方式和电池的载荷质量无法实现长距离的检测,检测范围很难超过100 m的索结构。因此、主塔附近的悬索上部或连接主塔上方的斜拉索上部仍是现有检测方法的盲区。
(4)多执行单元系统鲁棒性低:缆索机器人攀爬过程中,通常涉及多执行机构模块、多执行机构、甚至多机器人协同操作,控制电路、逻辑算法都较为复杂。高空强风作业环境下,单一故障可能导致系统无法移动,甚至存在高空坠落风险。
(5)其他干扰因素较多:缆索表面存在导流槽等特殊结构,同时强风、缆索共振等问题也影响机器人攀爬、检测过程的安全性和稳定性。
3.4 巡检无人机
随着桥梁结构及尺寸不断升级,大跨径桥梁、高桥塔、高桥墩等桥梁构件定期检测难度也逐渐增加。基于无人机(Unmanned Aerial Vehicle,UAV)高机动性的特点,无人机快速检查的各类方法正在逐渐取代仅依靠望远镜目视观察的传统检查方法。无人机依靠不同的飞行方式(直升机式、旋翼式、混合式等)悬停于人工难以抵近的构件附近,通过视觉或其他无损传感器实现桥梁病害的定位与识别。因此,基于无人机的桥梁检测方法可以大幅度提高桥梁检测效率,降低桥梁检测成本[134]。
2007年,法国巴黎路桥学院Metni等[135]学者提出了基于小型无人直升机的桥梁结构检测方法。该方法主要考虑了无人机在飞行过程中如何兼顾自身稳定性与目标检测姿态:首先从初始导航点在开阔的机器视觉环境内计算移动路径及检测姿态;然后基于饱和函数计算控制无人机的悬停静止状态;最终通过视觉系统获取待测目标信息矩阵。仿真试验优化参数方案后,以法国某座塞纳河上高饱和交通流的高架桥为例,通过安装在无人直升机摄像头拍摄了几分钟的视频序列。后续数据由桥梁检查专家分析,部分清楚的数据处理后可实现0.1 mm宽度裂缝的检测。该方法初步证明了无人机对于桥梁病害检查的可行性,尤其验证了在高饱和交通流情况下可以减少不必要封路及其他安全保障措施并开展桥梁检测的可能性。然而,分析该设备在短暂的实际验证过程,无人机悬停稳定性和后续数据完整可靠性都仍具有较大的提升空间。
随着微机电系统(MicroElectro Mechanical Systems,MEMS)技术的成熟,消费级旋翼无人机以及高分辨率图像采集设备进一步推动基于无人机的桥梁检测设备发展。Dorafshan等[136-137]学者通过对比携带Nikon COOLPIX L830的自研四旋翼无人机以及商业化Iris无人机和DJI Mavic无人机测试了四轴飞行器在不同条件下对于钢构桥梁病害检测的准确性。首先,在实验室环境内研究了不同表面光照可实现表面裂缝检测的最大距离,光照较差时可检测到细小裂缝的最大检测距离为0.3 m,光照较好时可检测到细小裂缝的最大检测距离为1.1 m;然后模拟无GPS条件弱风环境可到细小裂缝的最大检测距离,除了无GPS无法起飞的无人机外,弱风环境下可检测到裂缝的最大检测距仍可达到1 m;最后通过2次户外实地检测验证无人机对于室外钢构桥检测性能:在第一次爱达荷州阿什顿的Fall River大桥测试中,无人机可识别部分裂缝,然而标记痕迹下的裂缝难以被有效识别。此外,无GPS信号下,10 m/s的阵风也将导致无人机几乎无法返回有效画面;在第二次普渡大学S-BRITE中心培训设施的检测过程比较了无人机检查和人工检查的效率,无人机实际检测到的裂缝与人工检测数量相差不多。然而,无人机在高精度裂缝检测中将耗费更多的检测时间,同时裂缝误检率也较高,仍需要后续人工修正。
由于室外环境无人机受风的影响较为明显,多位学者尝试不同的解决方案减少风的影响。Morgenthald等[138]学者充分考虑了风速和风向波动导致图像质量(6清晰度、噪声、对比度、颜色还原度)的影响,基于双塔流体动力学模型设计较为稳定的无人机路线规划,尽可能减少大气湍流对无人机检测的干扰。Ikeda等[139]学者设计了一种基于八旋翼的触墙式无人机,通过适当的角度接触桥梁或桥墩侧面,以提升无人机在气流情况下的抵近能力。然而该无人机受限于结构,仅能应用于较为平整的竖直平面,无法应用于梁底等水平平面。Myeong等[140]学者设计另一种基于触墙式无人机的桥梁结构检测方法。该机器人配备4个硅胶皮表面的轻质轮结构,以较低的冲击力软着陆桥梁待测表面;同时可以使无人机沿着桥梁结构在竖直和水平方向移动,甚至在40°~80°的角度内以更低的功耗攀爬。然而,待测表面的灰尘很容易导致无人机摩擦系数的下降,竖直攀爬在实际过程中仍存在攀爬距离上限,后续可考虑提升无人机扇叶尺寸,一组扇叶用于提供吸力,另一组用于提供上升的助推力。同时,受限于接触轮结构,无人机在水平和竖直方向都无法横向移动,只能通过脱离后重新着陆的方式调整方向。
此外,除了传统视觉检测方式,无人机仍可搭载其他无损传感器增加桥梁检测数据维度。Omar等[141]学者通过无人机搭载热成像传感器实现了混凝土桥面分层的自动检测。无人机位于桥梁板面上方低空飞行,并通过高分辨率热成像相机对在役混凝土桥梁进行检测,检测结果经过增强处理后通过K-means聚类方法分割并识别目标阈值,以此构建面向桥面分层的二维热成像条件图。该方法可以在交通流正常通行地情况下,依托人工智能技术高频率、低成本、全自动的实现桥梁快速评估。然而,受制于检测方式,该无人机无法应用于车流饱和度较高的场景,检测局限性较高。而且,该方法需要无人机在道路正上方悬停式飞行检测路面,存在一定低空飞行碰撞和坠机风险,对于无人机操作员技术的要求较高。同时,无人机低空飞行也受国家、地区针政策影响,无法大规模开展应用。
针对桥墩、桥塔等高柱状的混凝土结构,Ayele等[142]学者设计了一种基于无人机视觉的自动桥梁裂缝识别系统。该系统分别采用DJI Matrice 100 & DJI Phantom 4 Pro V2作为无人机平台,可实现无GPS环境下的自主避障和巡航;通过搭载可7倍变焦的Zenmuse Z3云台相机实现桥梁外表面数据的收集并同步构建3D模型;该桥梁3D模型不仅可用于桥梁区域无人机SLAM定位和导航,同时也可以定位疲劳裂缝数据,为后续基于深层数据驱动模型分析桥梁病害发展提供理论数据支持。以挪威东部Viken县1座140 m高、混凝土结构的Skodsberg大桥为例进行试验,通过Mask R-CNN算法提取裂缝模型并通过GNU图像处理程序(GNU Image Manipulation Program,GIMP)将数据标记在检测图像中,供桥梁检测专家完成后续评估工作。尽管如此,Ayele等学者认为无人机检查目前仍只能作为辅助手段,难以完全取代人工检查。此外,在该项研究中也发现,天气亮度变化仍有可能导致基于视觉SLAM定位存在偏航和定位失准的情况发生;同时,桥墩、桥梁侧板等裂缝通常涉及多个平面(甚至涉及曲面),难以直接读取裂缝长度、宽度信息,且无法直接与桥梁3D模型匹配。
为了解决非平面结构模型几何畸变的问题,中南大学祝志恒等[143]学者通过图像拼接和刚性转换拟合等方法实现多角度平面在单一平面展开。然而,实际桥梁裂缝还可能出现在凹坑、曲面、不规则脱落面、拼接面错位处等区域,若直接展开为平面,将存在图像部分失真的情况。清华大学刘宇飞等[144-145]学者基于上述桥梁多曲面特性,设计了一种基于无人机平台的多视角桥墩裂缝三维构建方法。该模型分别应用于DJI S1000+无人机平台搭载佳能EOS 5D Mark III相机(分辨率5 760×3 840,并搭配35 mm镜头)以及DJI Inspire 2搭载DJI Zenmuse X5S相机(分辨率5 280×2 970,搭配15 mm/45 mm镜头)进行验证。该模型首先考虑无人机拍摄图像覆盖率的问题,制定了一种多角度、多备选图像采集的无人机飞行拍摄策略,并通过激光雷达建立三维点云模型;然后,基于该模型将识别裂缝投影到网络化三维表面的三角形模型中;最终结合裂缝宽度特征序列,实现裂缝模型三维重建。如图14所示,该模型以北京丰台区永定河附近某桥墩为例,在光线均匀的时段内(清晨或阴天时段),分别距离桥墩1,1.5,2 m开展桥墩裂缝检测。试验结果验证,该模型可有效校正非平面结构表面变形和几何变形,并可以依托高精度拟合定位的原始3D裂缝性状分析桥梁。然而,在实际检测过程中,由于进一步靠近桥墩可能导致撞击风险,多次检测中最窄裂缝宽度仅为0.57~1.29 mm,仍需要长焦或光学变焦镜头进一步提高裂缝识别精度。

图14 基于无人机视觉的桥墩多角度检测Fig.14 Multi-angle inspection of bridge pier based on UAV vision
综上所述,在桥梁检测过程中通过无人机使检测传感器进一步靠近桥墩、桥塔等人工难以到达的区域,提高桥梁检测的检测范围和精度,从而大幅度提高桥梁构件外部表观检查效率。现有无人机通常搭载视觉传感器并辅以激光雷达等其他无损检测方法,可有效降低桥梁检测成本,提高桥梁部分特殊构件检测周期,进一步提高桥梁检测数据多样性和检测结果可靠性。然而,基于无人机的桥梁定期检测仍存在以下问题。
(1)GPS信号丢失:受桥梁混凝土、钢筋、钢板结构影响,无人机在部分桥梁构件附近(尤其是桥梁底部)处存在无GPS信号或GPS信号弱的情况,仅依靠人工操作员远距离操作存在较高的撞桥、坠机的风向。
(2)抵近难度较大:除了上述GPS信号影响外,桥梁底部及桥墩桥塔附近风向、风力变化较大,常规无人机抵近距离难以突破2 m范围。
(3)检测精度:基于无人机的桥梁检测有较高的机载视觉/激光传感器高精度检测及SLAM建图的需求,无人机实际应用中较难满足有风环境下悬停的实时自适应稳定性,进而导致基于无人机的检测常用于明显病害的检测,细小病害检测结果存在较高的误检率,仍需要大量人工后续确认。
(4)无人机续航能力:受限于无人机载荷和飞行稳定性需求,无人机机载电池无法实现长时间的作业过程;通过电缆供电的无人机则难以保证拖挂状态下飞行稳定性和无人机检测范围。
(5)检测范围有限:无人机桥梁检测范围仅可应用于桥塔、桥墩、桥面、桥梁底部表面检测,且难以完成精细化检测任务,仍需要其他智能检测设备接触构件完成内部无损检测。
3.5 吸附式检测机器人
为了近距离使检测传感器靠近并检查梁底、桥墩、桥塔等人工难以观察的桥梁构件,解决现有基于无人机的桥梁检测技术检测精度较低、稳定度较低等问题,国内外研究学者以吸附式机器人为平台,通过远程控制或自动路径规划等方式实现特殊环境的桥梁检测。吸附式检测机器人技术难点主要是解决混凝土、钢结构等桥梁竖直外立面或水平下表面长时间吸附的问题,常见的吸附方式主要是磁力吸附、抓取式吸附、气动式吸附等[146]。磁力吸附常用于钢结构桥梁检测;抓取式吸附则多用于轨道、壁架等;气动式吸附则可应用于更为广泛的材料上,减少对桥梁外表面的二次损伤。
澳大利亚悉尼科技大学Ward等[147]学者设计了一种基于磁吸附的尺蠖机器人(Climbing Robot Caterpillar,CROC)。该机器人通过两组脚垫仿生尺蠖运动姿态向前依次蠕动,其中每组焦点都带有3个独立控制的磁性脚趾并配有力学传感器。CROC以悉尼港湾大桥为例进行测试,可以通过直径0.3 m以内的检修孔,也可以通过铆钉紧密的横隔板。在断电的情况仍可以保持稳定的吸附能力。同时,CROC搭配PrimeSense深度相机用于桥梁钢箱梁内部建图、导航以及病害检测。然而,该设备仍需要额外的线缆支持机器人动力供给和数据的传输,最多只能检测10 m左右的范围。同时,这些线缆可能会在机器人运动过程中缠结,进而导致设备功率限制和数据损失。
为了进一步提升磁吸式机器人的移动速度,ARA实验室的Pham等[148-149]学者设计了一种配备磁轮的小型钢构桥检测机器人。该机器人通过每个车轮中36个钕磁缸使车辆可以吸附于钢结构桥任意一个平整表面,并通过8个高扭矩伺服电机(525 g/mm)驱动4个车轮和4个轴使车辆可以在崎岖地形上动态调整接触面积高速驱动;然后,通过搭载的两个视觉相机和一个TOF(Time of Flight)相机实现钢桥和钢结构进行可视化和三维结构检测;检测的数据通过无线模块实施发送到基站机型后续处理。在实验室测试过程中,2块7.4 v 5 000 mAh的电池较难维持设备长时间的作业过程。此外,仅依靠磁轮结构仅能辅助机器人实现较为简单的钢面切换,无法直接应用于钢结构桥梁复杂表面结构。
日本大阪市立大学Takada等[150-151]学者考虑了轮式机器人的可通过性,设计了一种无框的双驱动轮桥梁检测机器人(Bridge Inspection Robot Equipping Magnets,BIREM)。该机器人通过额外搭配可旋转脚轮实现桥梁直角钢桥面的移动,并且基于无框的磁轮设计可以实现螺栓、螺母等障碍物的越障。然而,在实际测试过程中钢构件吸引力需求较高,后续仍需要考虑磁力更强的磁铁。同时,其74 mm的轮距存在部分螺栓间距处无法吸附的情况,仍需要可旋转脚轮调整。
然而,对于表面材料为混凝土的桥梁,无法直接通过磁力吸附在桥梁表面。南京邮电大学徐丰羽[152-153]课题组还设计了一种基于抓爪的桥梁检测吸附式机器人。该机器人首先建立了粗糙壁面上尖钩与微突起之间关系的数学模型;然后分析了3种不同情况下钩爪的受力情况,并得出钩爪稳定抓取的条件;最后通过高分辨率工业相机和混凝土钢筋检测仪实现桥梁关键部位精细化检测。但是,该款机器人检测平台不适用于快速大规模桥梁检测,且容易对桥梁表面造成二次损伤。同时,该设备成本高昂,设备操作存在一定的危险性,容易从桥梁坠落摔毁,存在砸伤桥下行人、车辆的风险。
华南理工大学蔡钊雄等[154]学者设计并研发了一种基于蜘蛛式桥梁检测机器人。该机器人通过每个触角的真空抽压装置实现对于混凝土结构的吸附,并且通过6个四自由度的机械足交替开关带动机器人前进,最终通过机器人底部的视觉传感器实现桥梁病害的检测。然而,该机器人机械结构、控制算法较为复杂,无法保证实际检测过程装备的稳定性和安全性,不适合市场化大规模应用。
印度特里凡得琅工程学院学者Sekhar和Bhooshan[155]为了进一步减少真空吸附对于混凝土的影响,设计一种基于风扇生成负压的吸附式机器人。该机器人通过伯努利原理利用风管风扇制造局部真空创造机器人的吸附能力,并通过驱动轮在桥梁底部行走,依托机器人前方的检测器实现病害的识别。该机器人无法在不同桥面结构间切换,且位于桥墩、桥塔等非平面竖直外立面时,风扇吸附的负压无法提供足够的附着力使驱动轮稳定爬升。
韩国世宗大学Jang等[156-157]学者设计了一种基于机械对向压力的环抱式桥墩检测机器人。如图15所示,该机器人通过4组对向的轮组及机械装置有效固定在桥墩附近;4组高清摄像机(分辨率1 920×1 080)安装在机器人上方,距离桥墩表面约250 mm,可在机器人爬升的同时以60 Hz的帧率记录桥梁表面细节。以韩国江陵城Jang-Duck大桥15 m的桥墩为例,该机器人仅需要67.5 s即可完成桥墩单次面的检测。然而,由于成本考虑,该机器人仅设置4组摄像头,无法实现全桥梁面的检测,后续仍需多次人工调整相机位置。同时,该机器人仅针对截面为圆形且直径范围有限的桥墩,无法应对其他截面的桥墩类型。此外,桥墩底部通常处在水下,仍需要其他的检测设备补足水下检测的空缺。

图15 韩国环抱式桥墩检测机器人Fig.15 Surrounding pier inspection robot of South Korea
综上所述,基于吸附式桥梁检测机器人可有效实现桥墩、桥底、箱梁内部等人工难以靠近区域的近距离观察,依托无损检测技术及人工智能处理可以实现待测区域的高精度重建并完成相应病害的检测。然而,吸附式检测机器人通常依照特定区域的检测需求设计,仍包括以下几点不足:
(1)吸附稳定性和越障通过性难以兼容:由于桥梁表面结构不同,吸附式机器人通过磁吸、抓取、气动等方式的同时,仍需在锈蚀、表面灰尘较多的环境下跨越螺栓、螺母等障碍物,并实现曲面或者不同外立面的爬行,机器人难以同时兼顾吸附能力和运动能力,进而导致检测效率较低,同时存在机器人坠落风险。
(2)机器人续航较短:受限于机器人吸附方式,其常规负载通常较小,进而导致通过电池维持续航的方式难以持续推进;基于线缆作为供能方式的机器人则通常受限于线缆长度和应用环境,箱梁内的机器人甚至出现线缆打结导致的机器人死机的现象。
(3)桥梁表面结构完整性难以保障:吸附式机器人由于需要于桥梁表面通过各种方法的接触,难以有效保证机器人作业过程不对桥梁表面造成破损。
(4)机器人自动化水平有限:现有的吸附式检测机器人可以部分解决特殊环境内自主驱动的情况,然而仍需要人工在桥梁下方、桥墩等位置布置机器人。
3.6 水下检测机器人
部分桥梁架设于海河之上,其水下的墩柱和桥梁桩基是支撑此类桥梁的重要承力结构。与此同时,近年来桥梁因水文因素造成的桥梁损毁已成为桥梁倒塌失效的首要因素[158]。水下桥梁构件检测方式仍以人工潜水员水下目视为主,检测人员水下风险和整体检测成本都较高。部分学者基于多种水下潜航器配置水下无损检测模块,研发桥梁水下检测机器人,可远程控制装备检测水下桥梁状态[159]。常见的无人航行器(Unmanned Marine Vehicle,UMV)可以按种类分为无人水面艇(Unmanned Surface Vessel,USV)、无人水下潜航器(Unmanned Underwater Vehicle,UUV)和遥控水下潜航器(Remotely Operated Vehicle,ROV)。USV通常是一种水面航行或半潜式的船艇,通过水下部分设置的传感器实现桥梁下部结构的无损检测;UUV通常是指能执行自动路径规划并通过无线信号传递信息的水下行驶的无系绳平台;ROV通常指通过系绳的水下航行平台,可实现实时控制和感知。
2009年,美国德州农工大学Murphy等[160-161]学者为了进一步分析飓风Ike后德克萨斯州玻利瓦尔半岛Rollover Pass大桥桥梁下部结构情况,通过3种UMV实现桥梁水下结构的检查,并针对各类型机器人特点进行分析。3种机器人分别采用Sea RAI(USV)、YSI Ecomapper(UUV)和VideoRay(ROV),并配有多种传感器:Sea RAI配有DIDSON声学相机(水下检查)、3台高清相机(水上导航),铅酸电池续航4~6 h;YSI Ecomaper配有惯性导航和声纳扫描器;VideoRay配有Blueview声学摄影机。各种类型的UMV通常都需要配有1名操作员、1名桥梁检查员以及1名目视安全员。在实际使用过程中,3款UMV可以基本上实现水下桥梁墩柱及基础结构冲刷情况检查以及周围的碎片分布扫描。相比于另外两款水下检查器,USV可以在浅水区域及沿海区域运行,而且可以有效避开水下障碍物,然而该设备不仅在控制过程中要应对洋流变化也要应对水上风流变化。对于浑浊水域,USV和UUV搭载的声呐设备可以有效成像,而ROV只使用一个摄像机,无法直接穿透1 m左右的浑浊水。此外,UUV在灾后场景的航行过程中,较多的航道障碍物造成了接近50%的航行事故率。多款UMV在水下桥梁检查过程中均表现出不同的特点,常规检测条件可有效观察、收集、记录桥梁水下构件数据,但是在飓风、地震等灾后环境下开展水下检测仍有较多的局限。同时,水下检测信息数据流较大,后续桥梁结构建模及数据分析等操作仍面临较大的挑战。
考虑装备在水面上下行驶特性差异,德国不来梅雅各布大学Mueller等[162]学者设计了一款兼顾水面和水下运行的水下桥梁检测装备Muddy Waters。该机器人同时具有横向和纵向的推进器,可针对不同障碍物有效避障;然后,通过搭载的多波束声纳、RGB-D相机以及自适应分辨率成像声纳系统实现不同水下能见度的检查;最终通过远程监测的桥梁静力学分析专家评估桥梁状况。该装备以Karl Carstens大桥为例,分析了桥梁结构相关区域的水位、土壤等信息。然而,水下桥梁检测的精度明显低于水上桥墩结构的检测,针对水下桥梁结构裂缝等细节的研究仍有待进一步提升。
大连海事大学Li等[163]学者设计了一款水下无人检测设备。该设备为了提升水下检测设备视觉检测能力,考虑了水下机器人计算资源有限的情况,基于YOLO V4为主体构建了一个轻量级卷积神经网络。该网络通过MobileNetV3取代CSPDarkent作为主干特征提取网络,并且调整MobileNetV3的特征层尺度,并将提取的初步特征层输入到增强的特征提取网络中进行特征融合。同时,在各种试验环境中测试了每个网络的病害识别精度和网络的性能,并验证了轻型网络在桥梁水下结构损伤识别中的可行性。如图16所示,无人检测设备可实现清水环境、浊水环境和深水环境中混凝土裂缝的检测。

图16 大连海事大学水下桥梁检测装备Fig.16 Underwater bridge inspection equipment of Dalian Martime University
2022年7月,荷兰DroneQ公司部署了加拿大Seamor Marine公司开发的型号为Chinook的ROV,用于检测荷兰鹿特丹Maassluis港的一座铁路桥[164-165]。该桥位于河流出海口,上方水流湍急、浑浊模糊,检测难度较大,超过130 a未进行检查。该机器人可以成功在狭窄的空间移动,并通过自动对焦高清摄像机实现港口底部桥梁基础的检测;同时,依托萨克逊大学研究的装置测量了桥梁基础厚度。试验结果证明,高清图像不仅记录了老化桥梁基础的状况,还帮助养护单位和业主提供了长期养护计划和经费预算分配的可视化数据支持。
为了解决雨季后水流浊度过高且伴有漩涡水流的问题,悉尼科技大学Le等[166]学者开发了水下结构清洁和检查的自主机器人系统(Submersible Pylon Inspection Robot,SPIR)。该设备首先通过爪臂刚性对接桥梁墩柱;然后使用基于高压水流喷射的三自由度机械臂实现待测区域的清洁;最后通过摄像头和声纳传感器对待测结构3D重建和检测。该机器人可在低能见度(可视距离50 cm以下)环境内应用全自动化实现桥梁检测,可替代潜水员执行常规桥梁水下结构清洗和检测。然而,该机器人与桥梁接触过程的强度难以保证,有可能对桥梁结构造成二次损伤。同时,SPIR难以在水流流速过高的水下自动航行,仍需要人工驾驶员和安全员保证设备稳定。
综上所述,现有水下桥梁检测设备主要均依靠各类无人航行器将水下桥梁无损检测设备可以有效应用在水中。此类设备可以大幅度降低人工水下桥梁检查潜水员的风险,在此基础上可以提升水下桥梁结构检测精度。此外,水下桥梁检测机器人还可以在以下3个方面优化:
(1)自主运行能力稳定性:受风流、洋流影响较大,不仅船体自身稳定性难以控制,洋流内碎石的障碍物也呈一定动态特性,难以避障。
(2)水下可观测能力:水下环境受光线浑浊度影响较大,仍需要多种无损检测方法提高水下桥梁构件检测精度和数据维度。
(3)设备专业性:现有设备通常是基于无人航行器增加部分水下传感器实现桥梁水下结构观察,仅个别设备针对水下桥梁等水下交通基础设施。
4 总结与展望
公路桥梁检测是保证桥梁结构安全稳定的重要过程,智能检测技术与装备可进一步辅助桥梁检测专家完成桥梁服役性能的评估。随着人工智能和数字图像处理技术的快速发展,人工目视检测演化的机器视觉表观检测方法成为智能检测装备在公路桥梁外表面检测的主要技术手段,不同类型的无损检测方法也可进一步为桥梁内部病害检测提供数据支持,实现桥梁检测数据可定位、可对比、可溯源、可监督。与此同时,无人车、无人机、无人船、爬壁机器人等多类型智能检测装备已经逐渐覆盖多种桥梁构件检测环境,检测精度和病害识别效果也随着无损检测技术发展而不断提升,突破传统检测中病害漏检、检测效率低等技术瓶颈。然而,根据当前装备发展现状及无损检测技术水平可知,现有公路桥梁智能检测装备仍以半自动甚至人工主动操作的方式控制,尚无一体式模块化智能检测作业平台实现检测任务自主动态规划、智能控制过程精细化操作、多设备检测协同作业、多源数据同步融合分析等功能。如何依托一体式模块化智能检测作业平台进一步提升公路桥梁检测效率、优化公路桥梁检测数据的完整性和可靠性、实现桥梁检测全过程智能化、信息化转变仍是当前桥梁智能检测行业的重要难题。
为了进一步强化公路桥梁预防性评估养护体系,优化公路桥梁检测作业、数据采集、安全评估流程,及时、准确、全面地发现安全隐患,提高公路桥梁设施质量和使用寿命,改善交通设施安全水平,一体式模块化作业平台可从以下几个方面开展下一阶段的研究:
(1)自动化驱动装备:依托高精度实时定位、动态路径规划、多模块智能协同控制、数字孪生等技术方法,实现一体式模块化智能检测平台全过程(除装备运输与安全监控外)自动化作业;依托多智能体集群系统协同控制技术,一体式模块化智能检测平台下多装备相互配合,实现桥梁集群式同步检测。
(2)高效化过程检测:针对桥梁特定结构障碍物区域,研发定制化装备装置实现避障、越障功能,提升行进间检测效率,尤其是降低面向桥面承载的智能检测装备使用时间、减少横向占道截面积,弱化桥梁检测对路面交通的干扰;延长智能检测装备作业范围,改进智能检测装备续航能力,提升智能检测设备有效检测时长占比;避免检测装备桥梁硬接触,减少因装备检测导致的桥梁二次损伤;根据日常巡查、经常检查、定期检查甚至灾后特殊检查需求,配置专项化检测流程、装备和技术方法。
(3)多元化数据分析:进一步提高病害检测数据质量,完善数据采集标准化流程,提升检测设备最小可检测范围,减少检测设备平均相对误差,优化病害定位精度及相对桥梁位姿关系;依托无损检测多源异构数据,提升桥梁内部病害检测能力,完善多维病害数据融合分析能力;结合桥梁BIM系统和历史病害信息,系统化分析评估桥梁安全状况。
猜你喜欢
今日农业(2022年3期)2022-06-05
今日农业(2021年8期)2021-11-28
交通科学与工程(2021年3期)2021-11-04
烟台果树(2021年2期)2021-07-21
今日农业(2020年19期)2020-11-06
水道港口(2019年5期)2019-11-19
石油工程建设(2019年2期)2019-05-11
湖南教育·A版(2019年4期)2019-05-10
小学生学习指导(低年级)(2019年4期)2019-04-22
山东工业技术(2016年15期)2016-12-01
