矿用井下人员定位系统设计与实现
2023-03-15 03:31:44侯卫鹏
煤 2023年3期
侯卫鹏
(山西焦煤集团 介休正益煤业有限公司,山西 介休 032000)
煤矿井下地理环境复杂多变,人员、车辆以及设备的监控难度大。随着国内煤矿井下自动化、智能化开采进程的不断推进,确保井下人员、车辆以及设备的安全、稳定运行成为煤炭行业面对的核心问题。目前,煤矿井下人员定位主要采用的技术有红外线定位技术、超声波定位技术、蓝牙定位、射频识别定位、超宽带定位以及ZigBee、WiFi定位等,定位精度为厘米级,最高精度可达1 m,最低精度为10 m;优点为设备功耗低、响应速度快、信号传播范围大;缺点为定位精度受灯光、粉尘等环境影响较大,存在多径效应问题,定位精度稳定性不高[1-2]。国外学者利用最近邻算法开发WIFI、RADAR定位系统,将接收到的信号强度与存储数据进行匹配,从而达到定位的目的[3];文献[4]提出质心定位算法,将相邻点作为参考点,但设置参考点的难度以及运算量较大;文献[5]提出一种核化距离算,应用支持向量机分类器作为井下人员定位手段,但定位精度相对较差。文章将超宽带技术与惯导技术相结合,实现了煤矿井下人员、车辆的实时、精确定位。
1 系统整体设计
超宽带定位技术采用非正弦波窄脉冲技术,具有抗干扰能力强、发送功率小的特点,传输速率可达3.1~10.6 GHz,传输时延为微妙级,可采用的定位算法有接收信号强度处理(RSSI)算法、根据信号达到角度定位算法(TOA)以及根据信号达到时间差定位算法(TDOA)等[6-7]。TDOA定位算法与其他相比,定位精度可至厘米级,文章基于TDOA算法实现井下人员、车辆的精确定位。煤矿井下人员定位系统整体设计架构如图1所示。
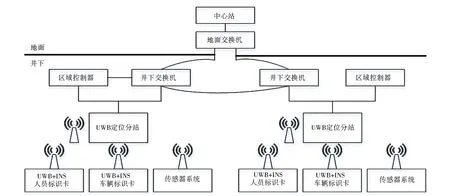
图1 矿用井下人员定位系统整体设计
矿用井下人员定位系统整体设计由地面、井下两大系统组成;地面系统包括地面交换机和中心站两部分,地面交换机用于接收井下交换机数据,将人员、车辆以及传感器信息,转发至中心站后对数据进行解算,实现对人员、车辆位置信心的精确定位。中心站除完成井下数据的解算功能外,还需完成对UWB基站、INS设备、标识卡、传感器以及物体运动轨迹的在线监测和管理。井下部分由区域控制器、井下交换机、UWB定位分站、UWB+INS人员标识卡、UWB+INS车辆标识卡、传感器信息等。在UWB定位分站覆盖的区域范围内,周期性的采集标识卡、传感器信息完成实时测距与通信,并将采集到的数据转发至区域控制器。对于未在UWB定位分站覆盖范围内的人员标识卡、车辆标识卡、传感器,经惯导模块对移动轨迹信息进行储存,并在移动至UWB定位分站覆盖范围内之后将数据上传实现精准定位。
2 硬件设计
2.1 UWB定位分站硬件
UWB定位分站硬件结构如图2所示,采用M6C2C CPU核心板,扩展TDOA定位算法以及卡尔曼滤波算法,该核心板支持高精度测距、定位以及数据同步传输。外接的DW1000芯片在传输速率为850 Kbps时的最远可视距离为150 m,为增强井下人员定位可视距离,扩展功率放大器,增强射频信号的发射功率和灵敏度,增加UWB定位基站与标识卡、传感器的通讯距离[8-9]。UWB定位分站将测距、定位数据以CAN总线通讯模式进行上传,交由区域控制器进行处理。
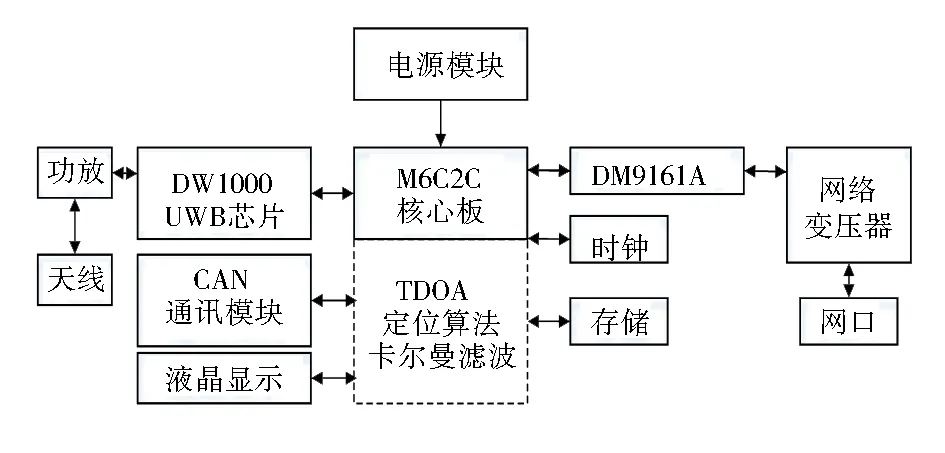
图2 UWB定位分站硬件设计
2.2 人员标识卡硬件
标识卡硬件设计部分包括UWB定位单元和INS惯导单元两部分。UWB定位单元中的核心CPU为STM32103F芯片,负责将人员、车辆以及传感器的坐标信息、运动轨迹信息存储至Flash[10]。待该标识卡移动至UWB定位分站覆盖区域后将数据经该定位分站传送至区域控制器;INS惯导单元负责对STM32103F芯片的数据局进行累计误差计算、处理以及校准,并获取该标识卡的加速度、角速度、航位坐标等信息进而推算该标识卡的坐标数据。该标识卡硬件部分由电池供电,并配置有充电管理单元具有低功耗、高射频的特点。
3 软件设计
煤矿井下人员定位系统软件设计基于Keil ARM软件平台,采用C语言与汇编语言混合编程,根据系统整体设计,软件部分主要分为UWB定位分站以及标识卡软件设计两部分。
3.1 UWB定位分站软件
UWB定位分站需完成的功能为:
1) 接收标识卡、传感器测距、位置坐标等信息,并完成TDOA解算、卡尔曼滤波;
2) 发送UWB定位分站广播信息,并完成与覆盖范围内标识卡、传感器的“标签”工作。UWB定位分站软件处理详细流程如图3所示。系统上电并完成初始化过程后,循环检测是否接有测距数据包,如果有,则接收该测距包并采用TDOA算法对该测距包进行解算,经解算结果进行卡尔曼滤波,将得到的精确的坐标数据进行上传。UWB定位分站没有检测到测距包时,需与标识卡、传感器进行信号同步。当检测到同步信号后完成时间同步,UWB定位分站检测该新加入覆盖范围内的标识卡、传感器Flash内是否存储有数据,如果有,则将该数据进行解算、滤波并获取坐标数据;如果没有,则循环进入检测测距数据包流程。
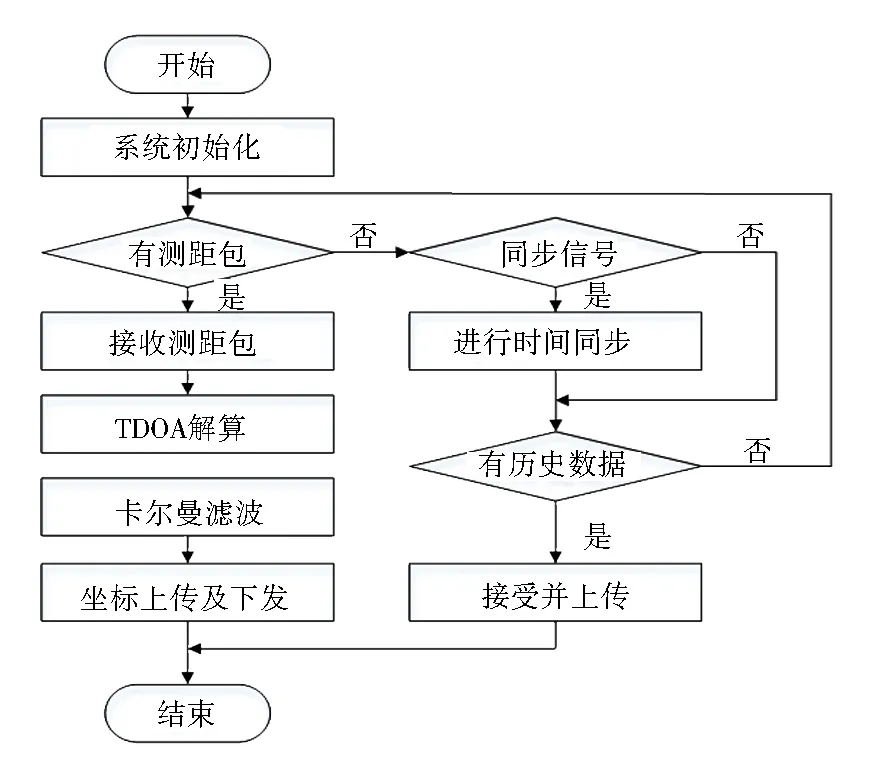
图3 UWB定位分站软件设计流程
3.2 标识卡定位软件
标识卡需完成的功能为:
1) 位于UWB定位分站覆盖范围内时,与UWB定位分站进行通讯,将人员、车辆以及传感器实时数据发送UWB定位分站,同时消除数据产生的累计误差;
2) 不在UWB定位分站覆盖范围内时,通过INS惯导系统获取人员、车辆以及传感器在三维空间的加速度、角速度值,通过加速度计以及陀螺仪对数据进行采样并将系统误差降低至最低。在获取物理运行过程中的加速度、角速度以及位置坐标信息后存储至Flash中,待进入UWB定位分站覆盖范围内后进行数据上传。处理标识卡的软件流程如图4所示,对于没有在UWB定位分站覆盖范围内的载体在获取加速度/角速度值判断其是否达到设定的阈值,进而判断该载体的下一步动作。达到预先设定阈值后,需计算该载体的实时坐标值并利用卡尔曼滤波算法进行修正、校准并添加时间标签后存储值Flash内存。

图4 标识卡软件设计流程
4 验证分析
为验证设计的煤矿井下人员定位系统的性能,在某煤矿综掘巷道内进行试验。根据该综掘巷道结构以及无线网络通讯需求,每隔120 m设置一个UWB定位分站,共设置8个,与WiFi、ZigBee以及红外定位方案进行对比,分别记录、统计各方案的定位精度、定位准确率以及响应时间,并形成表1统计结果。由统计结构可知,UWB+INS人员定位方案的定位精度可达0.2 m,定位准确率可达98.2%,响应平均时间为1.5 s,远优于WiFi、ZigBee以及红外定位方案。
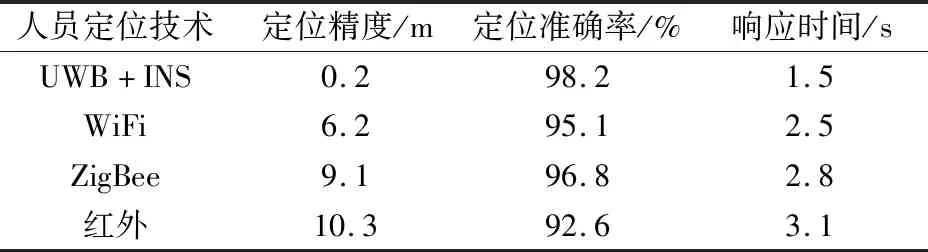
表1 四种煤矿井下人员定位技术测试结果数据统计
5 结 语
基于UWB以及INS技术的矿用井下人员定位系统可实现综掘巷道内人员的厘米级精准、实时定位,保证了井下作业人员的生命安全,满足了安全生产需要,解决了原定位系统存在的定位精度低、实时性差、成本高的问题,优化了煤矿井下安全生产制度,社会效益良好。
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
世界汽车(2022年6期)2022-07-13 04:25:40
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
电脑与电信(2018年11期)2018-02-16 05:41:24
职工法律天地·下半月(2016年9期)2016-11-30 09:48:18
电子制作(2016年23期)2016-05-17 03:54:06
科技视界(2016年9期)2016-04-26 09:14:10
车迷(2015年11期)2015-08-23 11:48:28
精准医学杂志(2015年2期)2015-03-20 03:15:31