水陆两栖飞机水动强度技术的现状与发展*
2023-03-15 00:31:04吕继航杨仕福罗琳胤
航空制造技术 2023年6期
吕继航,杨仕福,杨 荣,罗琳胤
(中航通飞华南飞机工业有限公司,珠海 519040)
水陆两栖飞机兼具水上飞机和陆上飞机的特点,具有机动性好、环境适应性强、对机场的选择范围大、快速抵达等独特优势。显著的特点和优势决定了水陆两栖飞机是水上飞机、陆上飞机及直升机不可取代的特种飞机,世界各国十分注重该类飞机的研制。
由于使用模式的特殊性,水陆两栖飞机不仅要承受陆上飞机固有的空气动力载荷、地面载荷,还要承受飞机在水面起飞、降落和航行时的水动载荷,其载荷情况多样、载荷分布复杂。为了确保水陆两栖飞机在水面环境的正常使用,必须有效分析水陆两栖飞机水上起降时的冲击载荷,根据这些载荷进行详细的结构设计,并通过符合性试验对设计的合理性进行验证,确保结构在水动载荷作用下的完整性。
国外许多国家对于水陆两栖飞机已经进行了多年的研究,并在水动载荷及强度设计等方面积累了丰富的理论成果和工程经验,大量的模型及飞机试验数据也使他们对现行飞机的设计与验证具备了类比外推的基础;国内水陆两栖飞机的研发相对缓慢,并且很长时期内处于停滞状态,需要在理论基础、仿真分析及试验验证等方面加强力量,开展系统、深入的水动载荷及结构强度设计研究,以期形成完整的技术储备和技术积累,从而满足型号装备的研制需要。
本文主要围绕目前水陆两栖飞机的研制需要,阐述国内外在飞机水动载荷设计与验证方面的研究现状和技术进展,以及在国家大型水陆两栖飞机研制过程中开展的相关水动力计算分析与试验研究工作,并探讨后续水陆两栖飞机在水动弹性问题方面的发展趋势,为水陆两栖飞机的水动强度设计提供指导。
1 水动强度的技术特征
水动强度主要是针对水面飞行器而言的,包括水上飞机、水陆两栖飞机等。陆上飞行器主要按照其在空气来流中的气动受载和力学行为进行结构强度设计,可以将其统称为飞行器的气动强度特性。但对于水陆两栖飞机而言,由于要在处于各种运动状态的水流中起飞、降落和滑行,就必须考虑机体结构在水流中的受载特征,这就产生了飞行器的水动强度问题。
相对于气动强度,由于飞行器水面环境运动状态的不确定性、多变性以及特殊的总体布局和结构形式[1],由此衍生的水动强度力学特征更为复杂。首先,水陆两栖飞机预期使用的水域环境包括风浪、涌浪等,这些波浪往往还带有不同的波高、波长和频率分量,这些外界因素的变化都会给结构强度带来不同程度的影响;其次,水陆两栖飞机通常采用船体式设计,其特殊的机身外形会产生特殊的水/气动力,在复杂风浪流情况下机身底部的水压和水面效应对飞机载荷和动力学特性都有直接影响。
在水面飞行器水动强度中,主要包括预期水面使用环境的水动载荷预计[2]和水动受载作用下的结构强度设计[3]两大部分。其中,水动载荷预计是水动强度设计的一个关键部分,是研发水陆两栖飞机的重要技术基础,直接关系到飞机结构轻质、长寿命和高可靠性的实现。在水动受载作用下,飞机结构的强度设计需要考虑静态载荷和结构动力效应的影响,这一点与陆上飞机的设计内容基本相似。
2 水动载荷预计技术
水动载荷是水陆两栖飞机特有的主要受载情况,是飞机在水面起飞、降落、滑行过程中水对机体产生的外载荷,严格意义上讲它是一种瞬态冲击载荷。飞机的着水冲击是一个随机的过程,其概率分布主要取决于飞机与水面运动的相对位移和相对速度,冲击载荷的量值与分布特征则取决于水域环境及水流与飞机发生砰击局部区域的几何形状等。
实际情况下,水陆两栖飞机在水面运动时的水域环境相当复杂,飞机着水时的水动载荷很难精确计算。以往主要依据工程上的经验公式对不同外形、不同吨位的水陆两栖飞机水动载荷进行计算。但利用经验公式时,由于对飞机和水面环境输入参数的定义过于简单和宽泛,使其计算结果一般偏于保守,而水动载荷作为水陆两栖飞机结构设计的重要依据,保守的载荷结果会导致设计出来的飞机有严重的超重问题。另外,在某些情况下,由于考虑的载荷影响因素有限,利用经验公式得到的计算结果也可能会偏于危险,影响飞机结构的安全性。这些都在一定程度上制约了水陆两栖飞机的发展。
为了深入研究水陆两栖飞机的水动载荷,在实践中为工程设计提供指导,主要采用理论分析、数值仿真分析以及试验测试等方法,对飞机着水过程中的局部和整体特征进行详细研究。
2.1 解析和半解析研究
经典的飞机着水载荷理论研究主要集中在二维结构的入水问题方面,普遍采用解析和半解析方法。Kármán[4]最早针对飞机着水所受冲击载荷的问题,将飞机降落过程简化为二维楔形体的入水过程,利用动量守恒定理研究了水上飞机着水时船体撞击水面所受到的冲击载荷。Kármán的楔形体入水冲击模型如图1所示,其中,W为楔形体单位长度的质量;β为楔形体斜边与静水面夹角;x、y分别是结构浸没半宽度、深度;考虑水波及水面张力影响,楔形体实际浸没宽度为2L。从经典的牛顿力学理论出发,提出了线性水平面和结构交混边界条件下平底结构和近似平底结构入水冲击问题的渐近线理论,但Kármán对水体附加质量的估算不够准确,也没有考虑水域运动对结构的动态冲击作用,因而在计算入水载荷时会有一定误差。
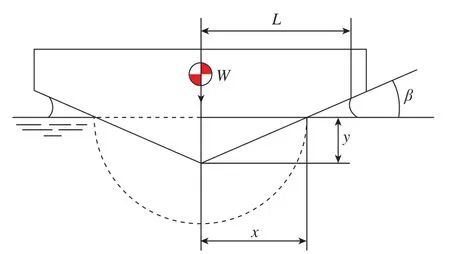
图1 Kármán的入水模型示意图[4]Fig.1 Kármán’s schematic of water entry model[4]
Wagner[5]对Kármán的计算方法进行修正,引入势流理论将楔形结构扩展为平板结构,且加入水波影响因子,通过对速度势和Bernoulli方程的求解获得作用于平板上的水冲击压力,同时,Wagner提出了小倾角模型的近似平板理论,认为在不考虑空气垫的情况下,任何剖面形状的小倾角模型表面的冲击压力分布都可用近似平板理论进行计算。Kármán和Wagner所做的工作为飞行器着水冲击载荷的研究奠定了基础。
20世纪40 ~ 50年代,随着水上飞机的不断发展,国外开展了大量针对飞机着水问题的研究。这些研究进一步发现,流体的压缩效应对结构物的入水过程有直接影响[6],如对于平板而言,假设水为理想可压缩势流,则平板入水冲击时的最大载荷发生在出现空泡前的时刻,且相对不可压缩流体而言,计入压缩效应后的水冲击载荷有一定程度的减小。同时,对于入水角度较小的平底结构,研究认为结构底部的高压力是在物体与水面之间的空气中产生的,称之为空气垫效应,其在平底结构的入水过程中也起着非常重要的作用,考虑物体与水面之间空气垫的影响,分析结果与试验结果更为接近。对于水上飞机,上述研究有助于在理论上建立气、液、固多相耦合运动的数学模型,为获取较为精确的数值结果奠定了理论基础。
解析和半解析法从物体入水冲击的基本理论出发,对水上飞机的着水过程进行了整体的力学简化,然后通过有限的数学变化和物理推导描述结构与水体的力学特性,进而实现流体域和结构域的快速求解,其物体相对运动的物理意义直观、明了,便于获得一些设计和试验方面可以应用的结果。
但是,解析和半解析法的理论假设过于理想化,具体表现为针对的工程问题通常比较单一,对工程问题的物理本质进行了高度简化,使其实际的应用范围受限,一般只能用于几何简单、形状规则的结构形式,无法准确描述各种复杂工程结构的非定常入水运动。对于需要考虑各种非线性耦合因素影响的物体复杂瞬态入水问题,数值仿真方法就显得非常重要。
2.2 数值仿真研究
随着计算机技术和数值仿真理论的快速发展,入水冲击问题不再局限于水动载荷的理论研究,转而开始对入水过程中发生的飞溅、射流、气垫等各种现象进行更加深入的分析。基于此,采用流固耦合、有限元、光滑粒子水动力学等理论的数值仿真方法逐渐成为飞机着水冲击载荷问题的主要研究手段。
国外的Belytschko等[7]采用有限差分法求解流场运动,利用有限元素法计算结构的动力响应,从而研究了圆柱薄壳结构在矩形水池静水面中的二维入水冲击问题。Anghileri等[8]应用MSC.Dytran软件分析了刚性球体的垂直入水冲击过程,并对不同的边界条件和流固耦合算法进行了讨论,通过一般耦合方法 (General coupling)和任意拉格朗日–欧拉耦合方法 (ALE)的比较认为,ALE方法的计算精度能够满足要求,计算效率高,对于任意几何外形、冲击速度、入水角度的刚性体或弹性体的入水冲击分析有一定的应用潜力。Oger等[9]利用基于光滑粒子动力学的无网格理论模拟入水冲击过程中的流体可压缩性,利用Runge – Kutta和光滑粒子流(SPH)方法求解物体的运动速度和位移,以及作用在结构上的水动压力,克服了结构变形时的网格扭曲和界面滑移跟踪问题。
同时,国内学者也开展了大量的关于物体入水冲击问题的数值仿真研究。钱勤等[10]提出了一种任意的拉格朗日–欧拉边界元有限混合法,求解了楔形体、半圆柱体等二维刚体的入水问题,结果表明利用该方法进行入水问题的数值分析具有一定的优越性。贺谦等[11]采用动网格技术对飞机及整个计算区域进行建模,利用VOF方法描述气–液交界面的运动信息,求解不同降落速度和着水迎角下飞机着水时机身压力随时间的变化规律,结果表明,不同着水条件下机身压力的变化规律基本一致,在着水初始阶段均达到峰值,随后迅速下降并趋于稳定。张韬等[12]基于MSC.Dytran平台,采用显式积分法求解离散的拉格朗日方程,用有限体积法求解欧拉方程,通过一般耦合方式进行流固耦合模拟,求解飞机水上迫降的冲击载荷,结果表明,飞机着水时底部压力在初期即达到峰值并开始衰减,压力达到峰值后会出现小幅波动,相同条件下弹性体模型的压力峰值略小于刚性体模型。
对于水陆两栖飞机而言,为了有效定量评估水动载荷的作用效果,需要对其着水过程进行精确的仿真建模,利用高精度数值模拟技术对该过程进行最大程度的精细刻画,为水陆两栖飞机的结构强度设计提供支持。在国家大型水陆两栖飞机研制过程中,根据需要也开展了大量的水面数值仿真研究工作,包括楔形体模型入水仿真、波浪模型仿真、水面效应仿真、三维全机模型着水仿真等[13–17]。
2.2.1 楔形体模型仿真
首先,采用经典的Kármán楔形体模型进行三维有限元仿真建模,利用ALE方法进行流固耦合分析求解,研究建模参数对仿真结果的影响规律,并结合楔形体模型入水试验结果验证飞机水动载荷数值仿真理论的有效性。
利用数值仿真得到的楔形体模型入水典型状态如图2所示。可见模型入水过程中,在气、液、固3者交界面会产生相互干涉作用,自由液面会产生运动变形,符合物体入水的实际情况。典型状态的法向加速度求解结果如图3所示,仿真过程中楔形体的加速度响应历程与试验结果趋势一致,幅值相当,吻合度较好。

图2 三维楔形体模型入水状态Fig.2 Landing state of 3D wedge model
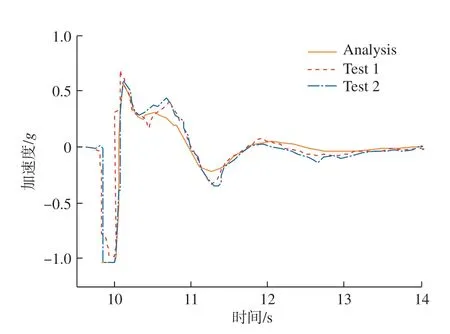
图3 典型状态的加速度响应历程Fig.3 Acceleration response of typical states
2.2.2 波浪模型仿真
水陆两栖飞机着水时将遭遇不同等级的水面波浪,波浪的高度、速度及传播方向等都会对飞机着水载荷产生影响。波浪条件下飞机着水动态响应分析的关键就在于如何数字化模拟水面的波浪状态。
实践中,在分析水面波浪力学形态的基础上,可以对波浪进行合理简化,构建波浪数字水域,为仿真分析提供依据。按波形的前进方向划分,波浪主要分为行进波和驻波。其中,相对于水面有水平运动的波浪称为行进波;如果波浪外形只是在原地上下作沉浮运动,而没有水平运动,则称为驻波。工程上普遍认为,理想化的波浪是一个向前运动的行进波,一般可以简化为规则的正弦波形式,如图4所示,其中,ζ为波幅;ζa为波浪的名义幅值;k为波数;Lw为波长。

图4 正弦波形式的波浪Fig.4 A wave in the form wave of a sine wave
虽然简化的正弦式波浪在真实水面上不一定能遇到,但不规则波浪也可以认为是由大量正弦波(或余弦波)叠加而成的。
基于正弦式波浪的特点,可以采用往复式摇波板模拟数字水域的造波运动。当摇波板做往复式简谐摇摆运动时,即可诱导水流产生规则的行进波,如图5所示。其中,h为水域水深;l为摇波板处于水面下的垂直深度;E为摇波板水面上的摇幅;A为波浪幅值;Lw为波长。
根据图5,假设波浪传播方向为正,x轴与水域底部平面重合,y轴与摇波板处在垂直位置时重合,且方向向上,则不同水深处摇波板的摇幅e可以表示为
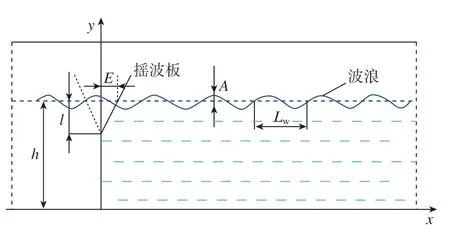
图5 摇波板造波示意图Fig.5 Schematic diagram of wave making by shaking plate
摇幅e和波幅A之间的关系定义为
式中,系数K描述了波浪幅值与摇波板摇幅之间的传递关系。
一般给定有限水深,然后在摇波板运动的诱导下,水域即可产生预期的波浪状态,用于波浪条件下的飞机着水动态响应分析。
2.2.3 水面效应仿真
水上飞机,特别是翼展较大的大型水陆两栖飞机近水面飞行时,水面气动力效应显著,对飞机的升力、俯仰力矩等有一定影响。通过模型风洞试验获得的飞机在有/无水面效应状态的气动力系数如图6所示。
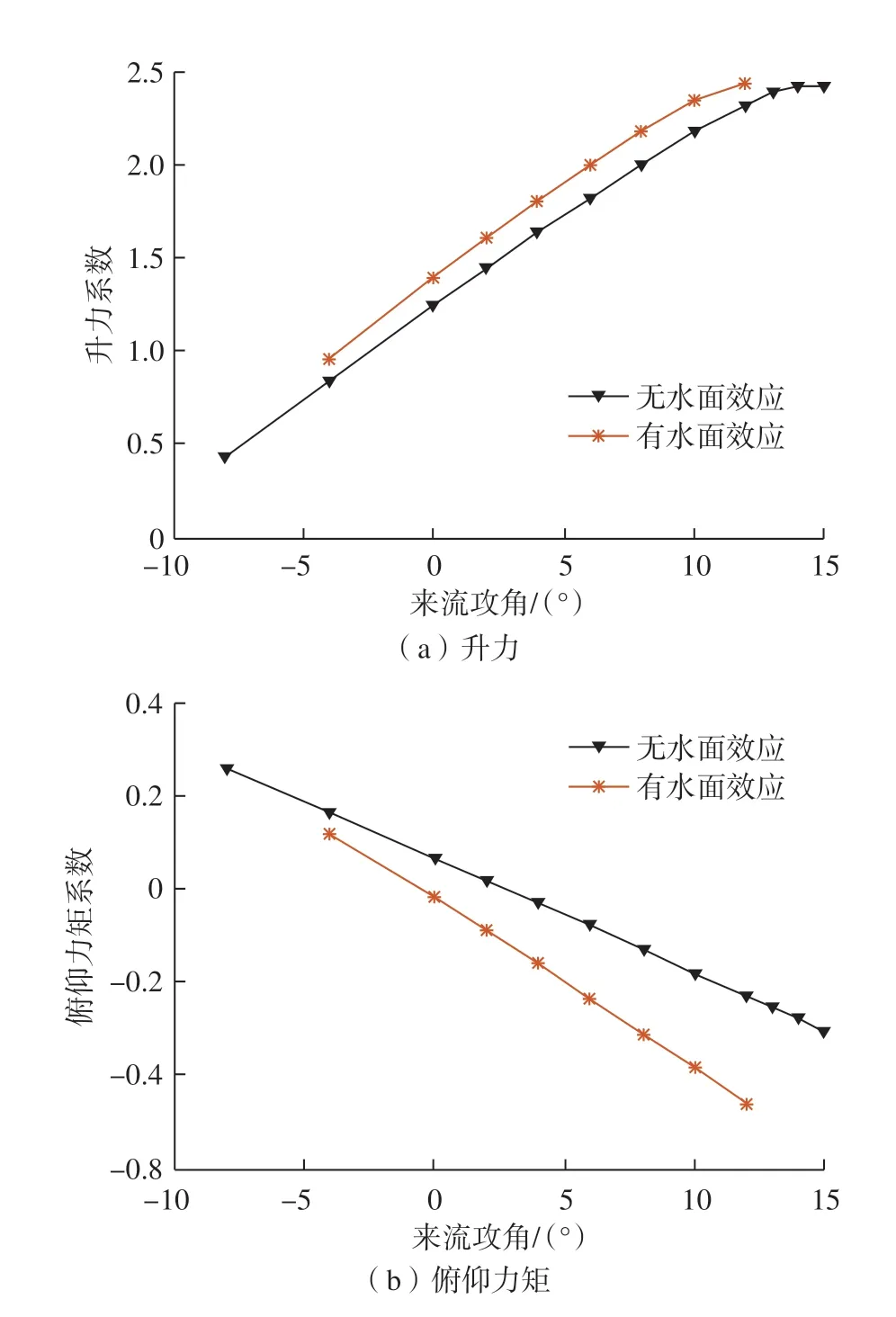
图6 水面效应对升力和俯仰力矩的影响Fig.6 Influence of water surface effect on lift and pitching moment
可见,在水面效应影响下,飞机的升力系数有所增大,俯仰力矩系数相对变化更大,这对飞机的着水动态响应特性将产生直接影响,在仿真建模时应予以模拟。目前,考虑飞机水面效应时的气动力可以通过等效模拟的方式实现。
设飞机着水情况下,初始俯仰角为θ0;任一时刻飞机的俯仰角增量为Δθ,则飞机实际的俯仰角表示为
假设飞机来流方向与水平面的夹角为γ,则飞机飞行攻角为
确定飞机在着水过程中各时刻点的攻角后,根据气动力随攻角的变化关系,便可以快速计算出每一时刻飞机的升力、俯仰力矩等,用于水面效应气动力仿真。
2.2.4 三维全机模型仿真
三维全机模型数值仿真分析时,根据水陆两栖飞机的总体气动布局建立的结构有限元模型如图7所示。建模时主要考虑机身、机翼、尾翼的气动外形进行网格划分,并根据需要对机身底部着水区域进行了适当的网格加密,飞机各部件之间采用“刚体捆绑约束”的方式进行连接,以保证各部分刚性位移一致,同时分别定义了机身、机翼、尾翼、发动机、浮筒等各部分的质量、质心及转动惯量,使得仿真模型的总质量、质心及转动惯量与真实飞机保持一致。
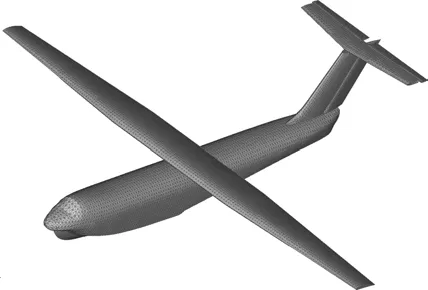
图7 飞机结构有限元模型Fig.7 Finite element model of aircraft structure
流体模型包括水体和空气两部分,如图8所示。由于飞机着水后产生的水压力在向下传播过程中将遭遇边界层的反射作用,故应保证水体有足够的深度,防止其影响飞机着水后水压力的反射效应。另外,为确保水体流入空气域内与结构模型进一步耦合,又引入了空气单元。水体四周定义为无反射边界条件,并在水与空气交界的地方进行了局部加密。
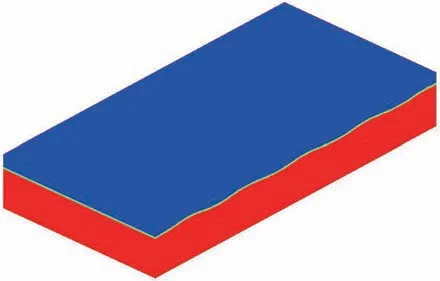
图8 飞机着水的流体模型Fig.8 Fluid model of aircraft landing
同时,根据气动载荷在飞机着水响应过程中的作用原理,利用仿真平台的重启动技术,通过外部接口程序实时获取飞机在着水过程中的飞行攻角和飞行速度,从而实现仿真过程中的气动特性数值模拟。
然后,在结构、流体、气动建模的基础上,针对静水面建立大型水陆两栖飞机结构和水体耦合的数值模型,采用ALE耦合算法求解飞机着水时重心过载、机身底部压力等的变化过程,并研究着水载荷特性的影响因素。静水面着水时的典型状态仿真结果如图9所示。
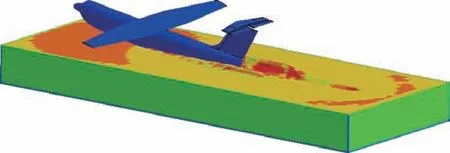
图9 静水面着水仿真典型结果(T=0.83 s)Fig.9 Typical result of landing simulation on calm water surface(T=0.83 s)
结果显示,飞机静水面着水过程中,受水体反作用力影响,飞机的飞行攻角不断变化,导致机体各处的过载随之变化。此外,着水载荷的影响因素分析结果还表明以下4点。
(1)着水攻角不同,机体的载荷响应也就不同。从兼顾过载和着水压力的角度考虑,飞机的设计着水攻角最佳值为5°~7°。
(2)下沉速度对飞机过载和机身底部压力有直接影响。飞机下沉速度越大,重心过载、水压力响应的峰值也就越大。
(3)着水时的飞行速度对水动载荷的影响更为显著。随着飞行速度的增大,飞机的重心过载、船底受水压力随之增加。因此,在确保不失速的情况下,应尽可能降低飞机着水时的飞行速度。
(4)气动力对着水载荷有减缓作用,未考虑气动力影响时的水动载荷偏于保守,不利于飞机结构的轻量化设计。
进一步,针对水陆两栖飞机在规则波水面上的着水动态响应问题,根据摇波板造波过程中摇幅与波高、周期之间的关系,利用数字水域造波系统及ALE流固耦合算法,进行波浪水面的模型着水数值仿真,得到的典型结果如图10所示。
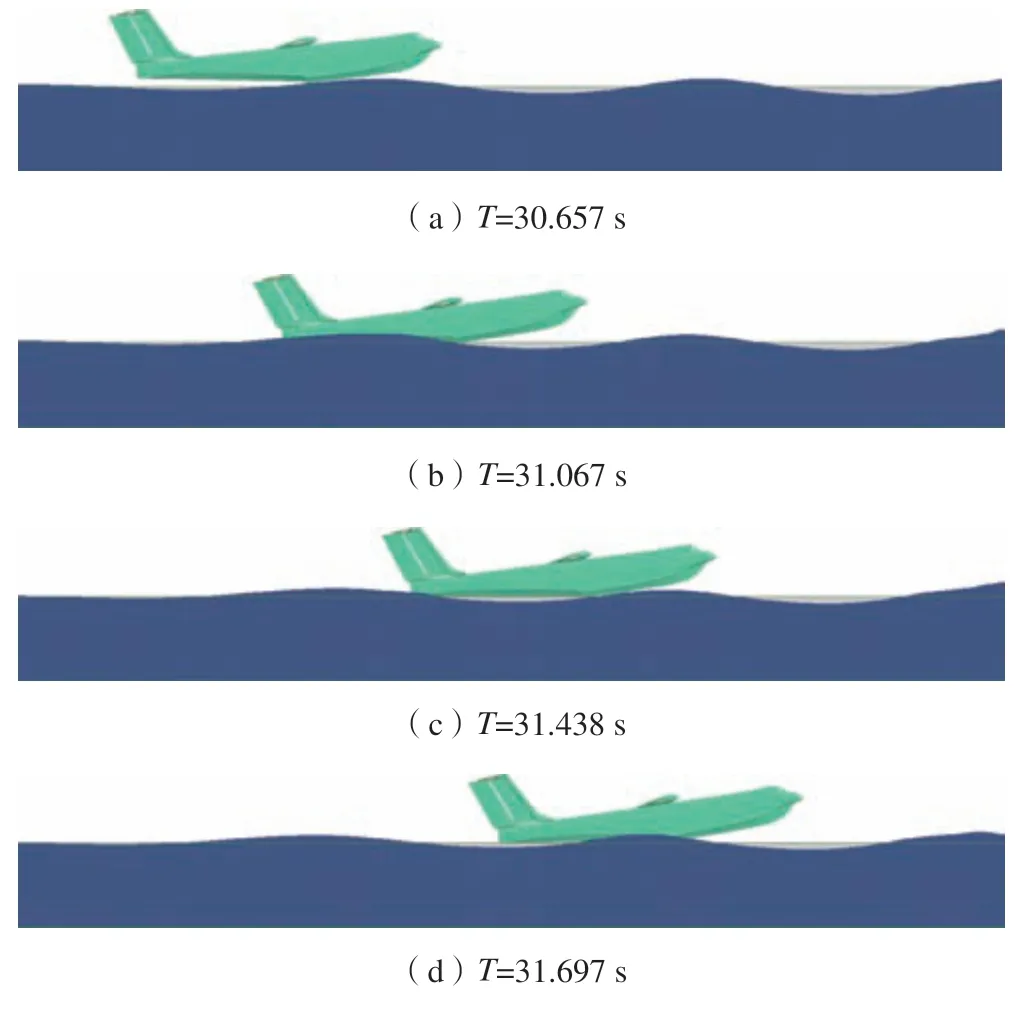
图10 波浪水面着水数值仿真典型结果Fig.10 Typical results of landing simulation on waves
从仿真结果来看,大型水陆两栖飞机在波浪水面上运动时,不同的着水方式对飞机的载荷响应有一定影响。飞机选择靠近波峰的接水点着水时,其重心过载与着水压力最小,靠近静水面的接水点着水次之。着水过程中,飞机均在遭遇第2个波浪时载荷响应最大,这主要是由于第1个波浪对飞机的动能削弱有限。此外,对于重心过载和着水压力而言,数值仿真与经验公式的计算结果量值相当,但仿真结果对于水动载荷分布的描述更为详细。
尽管上述已开展的数值仿真工作基本揭示了水陆两栖飞机着水冲击载荷产生的机理,甚至对着水过程中发生的飞溅、气垫等进行了深入的分析,并通过复现飞机着水的动态历程详细描述了全机整体和局部的响应特性,但基于流固耦合理论的数值仿真方法需要对受影响的流体域进行离散化,包括有限体积法 (FVM)、任意拉格朗日方法 (ALE)、光滑粒子流方法 (SPH)等,其数学模型规模庞大,计算周期通常较长,并且对于机体结构在水流和空气流高速运动过程中产生的气垫效应、空化效应[18]、尾吸效应[19]、流通效应[20]等现象的模拟还需依赖类似试验数据的有效支持,这就难以在理论上形成完整、封闭的物理体系,因而还有一定的内在局限性,使其在工程实践中应用受限。
随着计算机硬件技术和计算力学理论的不断发展,数值仿真在水陆两栖飞机领域将会得到更大的应用发展空间。尤其是在有限水深复杂流动环境水面效应下的气液混合特性[21]、波浪水流瞬态冲击带来的结构动态响应特性[22]、弹性体飞机气液固多相耦合状态的飞机运动特性[23]等方面,有望利用先进的数值仿真技术,发展分区耦合、完全耦合等更加精细化的高精度数值仿真算法[24],将水面环境条件从规则波向不规则波和风浪混合状态拓展,进一步研究水陆两栖飞机水面运动过程中的气液固混合动力学特性,以及气动力、水动力和结构变形对水陆两栖飞机水动载荷和结构特性的影响机理及普遍规律。
2.3 试验研究
水上飞机着水冲击的理论方法已经发展了几十年并取得了巨大的进步,但仍未能在工程设计中获得成熟的直接应用,通常还要开展一定的试验研究,以期得到更为有效的设计依据。
1919年Bottomley[25]利用水上飞机的V形浮舟模型进行了垂直自由落水试验,并根据实测的加速度曲线分析了飞机着水时受到的最大冲击载荷。Chuang[26]开展了刚性楔形体模型自由落体的入水冲击试验,对楔形面不同位置处的压力进行了测量,给出了不同倾斜角下水压力峰值的回归公式,并根据试验结果推导了底部砰击压力的近似计算公式。Zhao等[27]对底部斜升角为30°的V形楔形剖面以及典型的船艏外飘剖面进行了自由落体入水冲击试验,用于验证完全非线性水动力冲击理论的数值计算方法,结果发现垂直冲击力、压力分布的计算值与试验值在入水的初始阶段具有较好的一致性,但受三维效应的影响,在入水深度较大时两者有一定偏差。
鉴于倾斜角10°~20°楔形体入水冲击问题的重要性,国际船舶与海洋工程结构大会 (ISSC)载荷委员会针对楔形体最大冲击压力与自由落体速度之间的关系,对理论分析结果与模型试验结果做了详细的对比研究,获得了在理论计算和工程应用方面的指导性实用数据[28]。
波音公司早在B707飞机研制过程中,就开展了缩比模型的水上迫降试验[29],后续各种类似机型均采用以此积累的试验数据外推来评估飞机的水上迫降载荷,用于分析飞机着水载荷能否满足水上迫降符合性验证的要求。
大型水陆两栖飞机研制时,基于Froude数水动力相似准则设计并制造了水池试验缩比模型,如图11所示,并开展了水池重力投放试验和高速拖曳试验,分别研究了飞机在静水面、规则波水面的水动载荷特性[30–32],典型结果见图12。试验发现,单船身模型的初始姿态角对飞机着水冲击载荷的影响较小,但艉部着水时的偏心冲击会延迟载荷峰值的出现,且姿态角的变化滞后于水冲击载荷的变化;全机模型匀速着水时,随着水面波长的增大,试验模型的垂向加速度有多个响应峰值,在匀加速着水试验中,低速滑行时模型的垂向加速度响应幅值较小,而在高速滑行时模型响应幅值急剧增大。

图11 缩比模型着水试验Fig.11 Pool test of scaled model
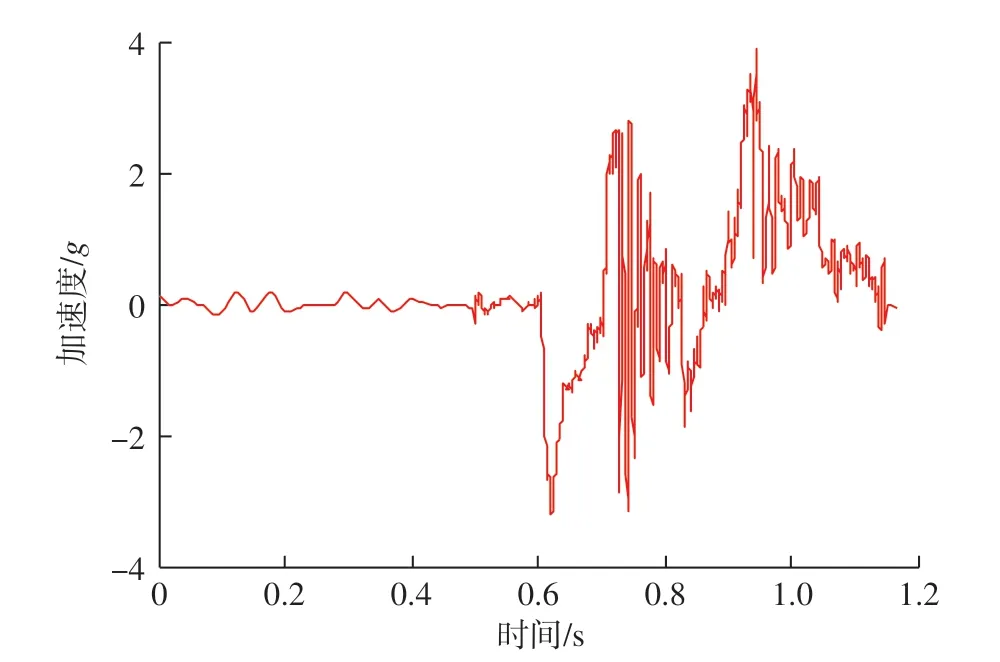
图12 模型垂向加速度测试的典型结果Fig.12 Typical test result of vertical acceleration of the scaled model
另外,由于水面气动力效应的影响,水陆两栖飞机的水面运动实际上是一个气、液、固三相耦合的作用过程。为了进一步研究飞机着水过程中水、气交混状态飞机的气动特性,研制团队还开发了一种用于模拟水面环境波浪状态、风洞安装的活动式波浪地板装置,如图13所示,然后通过模型风洞试验测试了飞机在波浪水面着水时的全机气动力分布特性,为数值仿真分析和水载荷设计提供了更充分的依据。
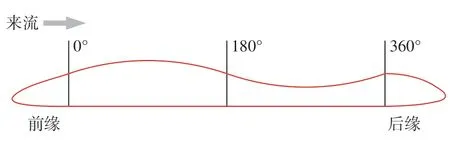
图13 波浪地板示意图Fig.13 Schematic diagram of wave floor
总的来说,在水陆两栖飞机设计过程中,从试验角度出发,可以为工程设计提供更充分的技术支持。而且,对于一些在理论计算或仿真分析方面难以充分考虑的复杂物理现象,如飞机入水过程中的水/气交混、空化/超空化、自由液面的射流喷溅、压力场的时空梯度效应等,只能通过水面试验的手段予以研究。
当然,由于飞机着水过程的影响因素众多,并且试验过程中对于初始条件及水域环境的模拟存在各种客观影响[31,33],导致试验结果存在一定的分散性与强非线性;同时,受试验室水池几何尺度、规则/不规则波浪造波能力、有效测试距离、模型缩比尺度效应、气动力雷诺数Re与水动力Froude数相似准则无法协调等方面的影响或限制,现有的模型水池试验也并非能够真实地反映飞机的水动力特性,尚需要不断改进模型水面试验技术,并通过大量的参数化试验形成全面的数据积累,然后利用数理统计学方法归纳总结飞机着水冲击载荷的内在规律,从而建立完备的飞机水动载荷试验技术体系。
3 发展趋势——水动弹性设计
水动弹性是近年来针对水上飞行器引出的一个新概念,也是未来水上飞行器结构强度技术发展的重要方向。水动弹性与飞行器的气动弹性相对应,主要研究惯性力、水动力和弹性力之间的相互作用,如图14所示。

图14 水动弹性的力三角形Fig.14 Force triangle of hydroelasticity
过去在飞机研制过程中,主要采用传统的设计手段研究水陆两栖飞机的水动强度特性,即先通过各种理论方法、工程试验等获得飞机的水动载荷特性,然后再按照水动载荷开展飞机的结构强度设计。这种设计理念经过多年的发展,取得了一定成功,但主要局限于刚体理论,忽略了结构弹性对载荷响应的影响,可能会造成一定的设计偏差[34–35]。
对于水陆两栖飞机而言,由于特殊的使用模式,其在水面起降和滑行过程中,经常受到水面气流、波浪等的连续扰动,容易引起机体结构振动,影响系统设备的工效性和结构的疲劳寿命等。借鉴现代船舶设计理论,可以采用考虑结构弹性与水动耦合效应的水动弹性直接设计方法[36–39],针对水陆两栖飞机具体的使用环境,考虑水体与结构之间的耦合作用[40–41],开展飞机水动力学仿真建模及结构动力学响应特性技术研究,以期建立把水体和结构的运动与变形作为一个完整系统进行分析的设计方法,从而为防止机体结构共振破坏、振动疲劳、结构的动态特性评价以及结构优化设计等提供依据。
早在20世纪70年代,在船舶设计领域就形成了二维水弹性力学理论,在此基础上进一步将结构动力学理论与三维船舶运动势流理论结合,又形成了广义三维线性水弹性力学理论,成为船舶与海洋工程流固耦合动力学研究领域中的一项奠基性工作。把海洋波浪环境中水面或水下航行器的耐波性分析、结构外载荷分析、结构强度与疲劳分析以及结构振动分析融合在了一个统一的流固耦合理论基础上,并先后发展了包括计及航速和非均匀定常流场影响的三维线性水弹性频域/时域分析理论、高海况环境大幅运动浮体三维非线性水弹性理论与数值方法以及基于水弹性理论的结构安全性评估技术等。典型的船舶水弹性分析结果如图15所示。然而,受结构形式、航速范围、Froude数等因素影响,现有的船舶水弹性力学理论无法直接应用于水陆两栖飞机。这主要是因为水面航行器的水动力特性与Froude数相关,其表达式[42]为

图15 船舶水弹性分析的典型结果Fig.15 Typical result of ship hydroelastic analysis
式中,V为运动速度;L'为特征长度;g为重力加速度。根据牛顿普遍相似定律可以导出,Froude数描述的是流体动能与流体势能之间的比例关系,其与物体的运动速度成正比,与特征长度的平方根成反比。
水面航行器在水面航行过程中承受的水压力主要包括水静压力和水动压力。一般地,普通船舶的最大航速不超过90 km/h,其Froude数小于或远小于1,相对水动力效应而言,水静压力占主导地位,主要靠船体淹没体积产生的浮力承载船舶整体重量。而水陆两栖飞机的水面航速最高达到160 km/h左右,且水陆两栖飞机的特征尺寸远小于大型船舶,因此Froude数大于或远大于1,此时起主导作用的作用力就变成了水动压力,主要靠船体高速运动产生的水动升力承载飞机全部重量,这就是飞行器水动弹性与船舶水弹性问题的内在区别。
当水陆两栖飞机在高航速、高Froude数状态运动时,船体附近处于低压区的液体可能发生空化或超空化现象形成空泡,这些空泡的生成、发展和溃灭对于非定常水动力有直接影响[43–44]。因此,水陆两栖飞机的非定常水动力特性远比船舶复杂,已超出现有的船舶非定常水动力数值理论的设计范畴,需要发展一种适用于水陆两栖飞机的高速水动弹性力学理论与方法,进行大型水陆两栖飞机在不同的波浪状态、遭遇频率、频散关系等条件下的结构外载荷、结构强度与疲劳及结构振动分析。结合现有的理论方法,可以采取工程方法或数值仿真方法等逐步发展水陆两栖飞机的水动弹性设计理论。
借鉴船舶水弹性设计的研究成果及经验,假设细长结构某一截面附近的流体运动只受上游流动的影响,而上游流动不受结构弹性的影响,则高速细长体理论依然适用。基于此,可以考虑超高速的极端情况[45],将高速细长体的刚性体理论推广到柔性体理论[46],并进一步改进传统的三维移动Green函数方法[47],以期发展一套适用于高航速、高Froude数的势流弹性体力学理论,建立适用于高航速、高Froude数的水动弹性工程设计方法,为水陆两栖飞机波浪激励载荷和结构动力响应等的工程分析提供支持。
以现代计算力学理论为基础,根据水陆两栖飞机水上运动的典型状态,计入流体的黏性影响,采用基于计算流体动力学的数字化波浪水域模拟各种自然环境条件[48],利用有限元素法进行弹性体结构动力学离散化建模[49],按照单向耦合、显式耦合或隐式耦合甚至完全耦合等流固耦合 (FSI)思想求解水体与飞机结构之间的多物理场耦合问题[50],对水陆两栖飞机各部位在弹性效应影响下的载荷、位移、加速度等瞬态特性的整体或局部特征进行详细分析。
有条件的情况下,可以结合基本理论和数值分析结果,以模型与飞机水动力相似准则为主要约束条件,利用水面拖航、自航等试验手段[51–52]在不同的水域环境开展水陆两栖飞机弹性缩比模型水面动态响应试验验证工作,深入研究飞机在结构、水动耦合效应作用下的水动弹性特性,验证或尽可能地改进飞机水动弹性的工程设计方法。其中,飞机弹性缩比模型的设计与制造是试验能否取得成功的关键。
与飞机以往采用的颤振风洞试验缩比模型不同,水面动态响应试验采用的缩比模型需要按照Froude数相似准则对飞机的几何外形、质量分布以及刚度分布进行等效设计[52–53],保证模型与飞机之间满足几何相似、流体力学相似、结构力学相似关系,典型的水陆两栖飞机水面动态响应弹性缩比模型如图16所示。模型设计时,还要按照预期的水面冲击载荷进行模型的结构强度相似设计[54],防止模型在试验过程中因强度不足而破坏。模型的选材必须考虑材料强度、刚度、质量的匹配性,常规材料很难满足设计要求,必须采用轻质、高强度、弹性模量大的合成材料。同时,在保证不影响水动载荷正常传递、不产生附加刚度的基础上,还要对缩比模型各分段的连接处进行必要的防水密封处理。
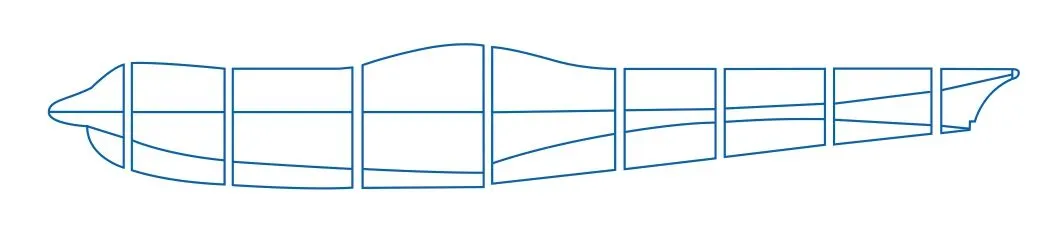
图16 典型的水面动态响应弹性缩比模型Fig.16 Elastic scaled model of dynamic response on water surface
4 结论
目前,航空业界越来越关注水陆两栖飞机的发展。随着设计要求的不断提高,水陆两栖飞机结构强度设计过程中也遇到了很多新的挑战,其中以水陆两栖飞机的水动强度设计问题尤为突出。在国家大型水陆两栖飞机设计过程中,采用传统的设计方法也可以解决大部分问题,但由于水动设计和试验理论不系统、不完整,缺乏相应的技术积累和技术储备,未来还需要深入开展充分的飞机水动载荷和强度符合性设计研究,完善飞机水动载荷预计的理论方法及其试验验证工程技术,以期形成较为完整的水陆两栖飞机水动强度设计与验证体系。
水动弹性设计是水陆两栖飞机水动强度未来发展的重点方向,可以把水体和结构的运动与变形作为一个完整系统进行处理,为飞机在不同水域条件下的结构载荷和强度设计提供重要的技术支持。受结构形式、航速范围等影响,现有的船舶水弹性力学无法直接应用于水陆两栖飞机,因此需要在水动弹性理论基础、仿真分析、试验验证等方面加快研究,如借鉴移动脉动源Green函数法、2.5D细长体理论、船舶三维非线性水弹性理论等,探索高航速、高Froude数状态的广义非定常水动力及水动弹性设计的基本理论和工程方法,并采用弹性缩比模型试验、全尺寸飞机飞行试验等验证水动弹性理论方法的有效性,研究并改善理论结果与实测结果的相关性,以期满足型号研制的迫切需要。
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18 11:22:44
国画家(2021年4期)2021-10-13 07:32:06
课外生活(小学1-3年级)(2020年2期)2020-03-09 03:24:26
当代陕西(2020年24期)2020-02-01 07:06:46
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
摄影之友(影像视觉)(2017年8期)2017-11-27 02:08:34
青少年科技博览(中学版)(2017年1期)2017-03-02 06:19:16
能源(2016年3期)2016-12-01 05:11:02
现代企业(2015年6期)2015-02-28 18:51:56
滇池(2014年5期)2014-05-29 07:30:25