
基于北斗定位技术的森林防火灭火机器人研究
2023-03-12 08:49彭臻妍黄家晖廖展豪李晓钦区浩辉
消防界 2023年11期
彭臻妍 黄家晖 廖展豪 李晓钦 区浩辉

摘要:本设计为基于北斗定位技术的以STM32为主控芯片的森林防火灭火机器人,这种机器人产品通常由驱动、红外、超声波、温度等基础模块以及WIFI232模块、北斗模块和无线通信模块组成。其中,通信模块由两块NRF24L01无线模块所组成,一块用作接收,另一块用作发射。驱动模块由L298P型号的驱动芯片和电动马达所构成,HJ-IR2红外传感器则是红外传感器模块的关键组件。机器人通过北斗定位技术实现精准防火灭火。
关键词:北斗定位;超声波传感器;无线通信模块;森林防火灭火机器人
引言
随着物联网技术的迅猛发展,机器人制造产业成为该领域的典型代表之一,涌现出了大量新兴产业。例如可以帮助人们减轻家务的扫地机器人,可以代替导盲犬或在复杂地形帮助寻路的导航机器人,极大提升了人们的生活便利性。国内对于森林防火愈加重视,我国对于森林火灾的防火措施重点集中在预防森林火灾。通过王小菲,马华卫,李元旭等人的文献资料可以清晰发现,我国对于森林防火依然缺少充足的应对措施。本设计为基于北斗定位技术的森林防火灭火机器人,可实现简单防火灭火。
一、总体设计
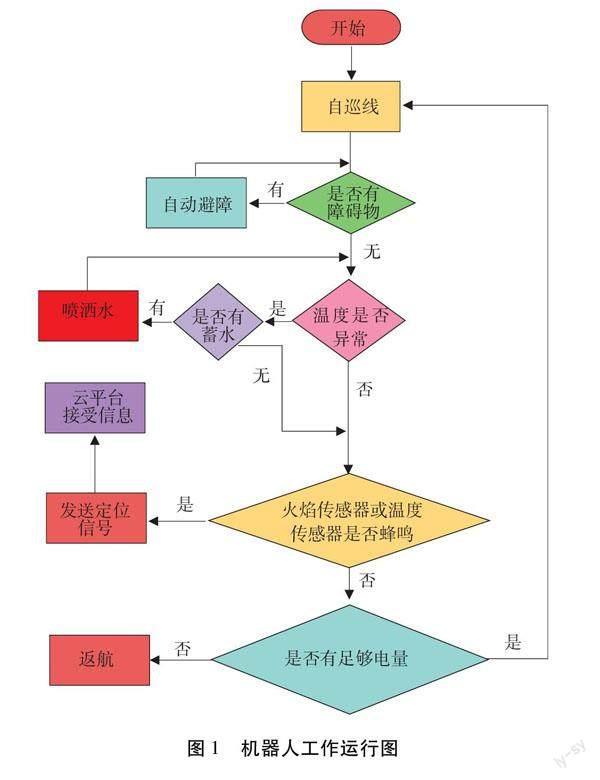
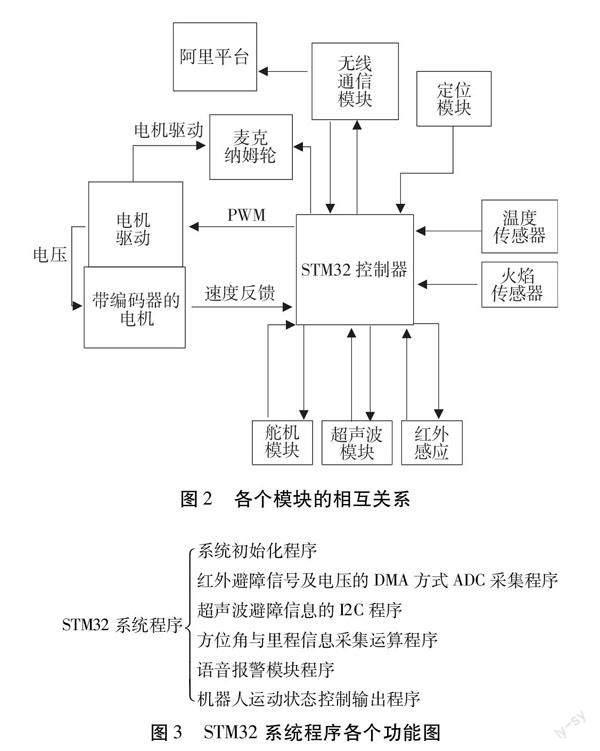
在本项目中,森林防火智能小车需要能实现寻线巡逻,判断是否有障碍并且自动避障。同时,在巡逻中能判断周围是否有温度异常区域,向温度异常区域喷洒水来解决温度异常现象。当无法解决或智能小車缺少蓄水时,便会进一步判断是否生成火灾。当火情已经出现且智能小车无法扑灭时,小车自动将北斗定位信息上传云平台。小车还会结合自身电量决定是否要继续寻迹或返航。该机器人的工作运行图以及各个模块的相互关系如图1、2、3所示:
二、硬件模块设计
(一)智能小车实现避障
该模块在智能森林防火小车中起到规避障碍物的基础功能。其中运用HC-SR04型号的超声波主要发挥了测距和避障功能,超声波模块通过发射超声波脉冲并接收其反射波来获得障碍物与小车之间的距离。该模块由超声波发射器和超声波接收器,从而实现了探测距离的能力,可探测距离为:2cm-450cm。在实际情况中,该探测距离足够应付各种复杂情况。在智能小车中,HC-SR04超声波模块被安装在小车的前部,可以实时监测小车前方的障碍物距离。当超声波模块探测到障碍物时,它会立即发送信号给控制系统,控制系统根据接收到的距离信息来判断是否需要进行避障动作,同时也在智能小车左右两边均安装超声波模块,在麦克纳姆轮的帮助下可以实现复杂地形的避障动作。
(二)通信模块
在智能森林防火小车中,NRF24L01无线通信模块可以起到将小车内部的各种传感器数据(如温度、湿度、烟雾浓度等)通过无线方式传输到系统设定的平台,实现对森林火情的实时监测和数据采集。
NRF24L01是一种低成本、低功耗的2.4GHz无线通信模块,可用于实现短距离的无线数据传输。其具有多信道选择功能,可避免与其他无线设备的干扰。支持高速的数据传输,最大传输速率可达2Mbps,适用于快速传输数据的场景。而且NRF24L01模块设计为低功耗,可在待机模式下实现极低的功耗,适用于森林日常巡逻的长时间工作。通信模块支持多种通信模式和网络拓扑,可以满足不同应用场景的需求。
(三)电机驱动模块
该智能小车采用L298N模块作为电机驱动模块[1],可以方便控制小车的前后直流电机。L298N模块内部包含4通道逻辑驱动电路和桥电路,一个模块[2]就可以很方便同时驱动2个电机。控制端引脚与单片机的PC0~PC3、PC6~PC12、PD2端口相连,通过控制电流方向来实现小车的前进、后退或停车。采用PWM软件调速可以调节小车左右轮的速度和转动方向,从而实现对小车行驶方向的精确控制。
三、软件设计
设计一个微信小程序,实现在微信中打开北斗工具箱小程序,可以展示当前小车的连接状态,中间有一个连接小车的按钮,点击则会连接小车,连接小车之后,按下方的导航界面,则会跳转到路线规划界面,展示出腾讯地图,可以在界面进行路线规划,如图4所示。
(一)微信小程序前端开发
微信小程序(Wechat Mini Program)是一款由腾讯公司推出的应用程序,可在微信软件中运行,是一种不需下载安装即可使用的应用,它是基于微信客户端的轻量级应用,利用微信提供的基础能力,实现了极致的用户体验,用完即走。微信小程序借助微信庞大的生态圈系统,拥有微信搜索、公众号跳转、小程序菜单等多个入口,用户接入成本极低。其采用了MINA开发框架,视图层包括WXML和WXSS文件,通过腾讯地图的API,实现在页面上展示地图,如图5所示。[3]
(二)微信小程序后端开发
使用的技术包括 Spring Boot 框架,用于构建微服务应用程序,并与阿里云等云服务提供商集成,以实现高可用性和可扩展性。这些后端服务通常包括用户认证、数据存储、与第三方服务的集成(如支付、地理位置、消息推送等)以及与微信小程序前端的交互接口。通过这些后端服务,可以实现微信小程序的功能,包括但不限于用户管理、数据存储和业务逻辑处理[4]。
四、系统测试结果
该机器人使用超声波及红外避障模块,检测障碍物信息,进行避障操作,其中火焰传感器模块使得机器人具备识别感应火焰操作,实现精准定位火焰位置,机器人通过超声波模块进行避障,利用舵机实现摇摆洒水灭火,机器人速度的控制精度和稳定性较高,测试如图6、7所示。
结语
本设计为基于北斗定位技术的以STM32为主控芯片的森林防火灭火机器人,它主要利用现今先进的物联网技术,将较高性能、较低功耗的STM32芯片和多样传感器及硬件模块进行融合,实时检测火焰,使小车能够完成简单的运动、避障和防火灭火操作。同时,小车的结构简单,采用螺丝将各模块固定在车身上,易于安装和操作,具有较强的实际应用意义。
参考文献
[1]曾维鹏,张逢春.基于蓝牙手机的遥控小车的设计与制作[J].电子制作,2016(19):8+34.
[2]柳叶.基于微信小程序的校园导航系统的设计与实现[J].测绘与空间地理信息,2021,44(11):84-86.
[3]范光明.基于微信小程序的行车记录系统的设计与实现[D].吉林大学,2019.
[4]王奎,程科,李肇基,等.基于STM8l平台的智能云窗控制系统设计[D].江苏科技大学计算机科学与工程学院,2017.
作者简介:彭臻妍(2004- ),女,汉族,湖南澧县人,本科,研究方向:电气工程及其自动化。
