
基于卡尔曼滤波的轨道阀阀位测量方法研究
2023-03-09 07:55:30葛文强
自动化与仪表 2023年2期
王 悦,葛文强
(北京无线电计量测试研究所,北京 100854)
现有技术中,轨道阀作为单阀座双向密封的球阀综合了闸阀、球阀、截止阀和旋塞阀的优点,在输气管道上广泛应用[1]。轨道阀通常配置有反馈阀门阀位的反馈器。反馈器配合现场PLC(可编程逻辑电路)系统可实现阀门开关状态的远程反馈,为监控系统提供相应的阀门位置信号输出[2]。但受现有轨道阀结构限制,集成的反馈器主要用于现场操作人员观察,直接与PLC 系统结合采样精度有限,而且现场PLC 系统与传感器间的线缆敷设受到控制手轮操作干扰,会对管道上附属设施的装卸造成不良影响[3]。
因此采用非接触式传感器进行旋转量的采集,目前通用性传感器有陀螺仪、霍尔传感器等。霍尔传感器能够对间隔摆放的铁磁物块进行计数,还能辨别增减方向[4-7]。在轨道阀手轮上安装齿条状圆盘,即可采集阀门的旋转量。然而,在阀门转动过程中,铁磁物块摆放间隔较大会造成霍尔传感器计数不连续性,而且难以避免阀门垂直于旋转面的震动干扰,造成霍尔传感器计数误差。而陀螺仪的温漂、时漂、随机干扰等误差[8-9],使其难以单独应用于旋转测量系统中。使用多传感器融合滤波方法是解决单一传感器测量精度较差的重要手段[10-13]。
本文针对单一使用陀螺仪或霍尔传感器测量旋转角度的局限性,提供了一种基于卡尔曼滤波算法的轨道阀阀位解算方法。依靠三轴陀螺仪与霍尔传感器组合滤波方法,实现了轨道阀更为精确的阀位测量方式。通过单轴转台获取传感器原始数据与标准旋转角度,在Matlab 平台上进行仿真,对比单一传感器与组合测量得出的阀位数据。实验结果表明,该滤波方法有效抑制了陀螺仪的漂移特性,增强了霍尔传感器测量的连续性,提高了阀位测量精度。
1 传感器误差建模
对于不同的传感器,具有不同的干扰及误差特性,因此首先确定传感器的误差模型与相关物理量的解算模型。
陀螺输出信号yg,t包含了真实角速率ωt,零偏εg,t以及高斯白噪声νg,t:
经过四元数解算过程,陀螺零偏εg,t是引起三维失准角的主要误差源,陀螺零偏属于低频、慢变过程,有=0,νg,t为零均值高斯白噪声。
建立陀螺仪测量转角的线性模型如下:
式中:θ(k)为阀门转角;ω(k)为陀螺仪角速度;b(k)为陀螺仪常值偏差;w(k)为陀螺仪高斯白噪声;dt为测量周期。
霍尔传感器量测模型:
式中:z(k)为霍尔传感器测量得出的阀门转角;θ(k)为真实阀门转角;v(k)为霍尔传感器测量噪声。
2 组合滤波模型建立
选择阀位测量系统状态: 把阀门转角θ 作为一个状态向量,以霍尔传感器估计得到的陀螺仪常值偏差b 做为另一状态向量,X(k)=
构建卡尔曼状态方程:
构建阀位测量卡尔曼滤波器:
系统状态矩阵:
系统量测向量:
利用卡尔曼滤波算法对阀门阀位测量数据进行数据融合,数据融合步骤如下:
(1)采样陀螺仪、霍尔传感器转速和转角测量数据。
(2)采样数据时间更新过程:
(3)量测更新过程:
3 实验验证
为验证本文阀位组合测量方法的精度,通过单轴转台获取传感器原始数据与标准旋转角度,在Matlab 平台上进行仿真,对比单一传感器与组合测量得出的阀位数据。
实验设备:硬件系统、高精度转台(如图1所示)、PC 机。
图1 高精度转台Fig.1 High precision turntable
实验步骤:以高精度无磁转台的刻度为基准(误差0.01°)。首先将转台旋转至0 刻度处,分别记录下陀螺仪、霍尔传感器输出的数据。此后,均速旋转转台,记录下传感器不断输出的传感数据,直至转台再次旋转至0 刻度处。
实验结果:通过Matlab 平台分别计算单一陀螺仪、霍尔传感器、陀螺/霍尔组合滤波的阀位值,并进行对比分析,绘图如图2所示。
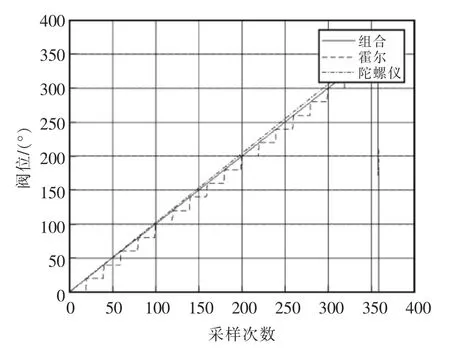
图2 陀螺仪、霍尔传感器、陀螺/霍尔组合滤波的阀位值对比曲线Fig.2 Comparison curve of valve position value of gyroscope,Hall sensor,and gyroscope/Hall combined filtering
图3所示为单一陀螺仪、霍尔传感器、陀螺/霍尔组合滤波的阀位值误差对比。

图3 陀螺仪、霍尔传感器、陀螺/霍尔组合滤波的阀位值误差对比曲线Fig.3 Comparison curve of valve position error of gyroscope,Hall sensor,and combined gyroscope/Hall filter
从表1可以看出,陀螺/霍尔组合滤波最大误差为0.57°,平均绝对误差0.29°,比单一陀螺仪、霍尔传感器测量精度显著提高。

表1 陀螺仪、霍尔传感器、陀螺/霍尔组合滤波的阀位值误差统计Tab.1 Valve position error statistics for gyroscope,Hall sensor,and combined gyroscope/Hall filter
4 结语
本文使用多传感器融合滤波方法,融合霍尔传感器与陀螺仪数据,抑制噪声干扰,解决了单一传感器测量精度较差的问题。通过建立传感器误差模型补偿随机漂移误差,通过使用自适应量测噪声矩阵减小垂直于旋转面的震动干扰对旋转角度解算的影响。本文的技术方案实现了低成本、高精度的阀位测量系统,发展了高效精确的阀位测量方法。
实验结果表明,本文滤波方法有效抑制了陀螺仪的漂移特性,增强了霍尔传感器测量的连续性,提高了阀位测量精度。本文方法适用于各类手动、电动阀门阀位的解算,同时也适用于旋转多圈的阀门。
猜你喜欢
应用能源技术(2022年9期)2022-10-22 07:27:00
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
科海故事博览·下旬刊(2020年3期)2020-03-15 05:49:32
科技创新与应用(2018年17期)2018-06-28 10:22:48
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
童话王国·文学大师班(2017年6期)2017-07-10 05:54:07
山东工业技术(2016年15期)2016-12-01 05:32:01
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
太空探索(2015年6期)2015-07-12 12:48:42
自动化仪表(2013年1期)2013-12-01 10:09:16
